端口受控哈密頓方法的永磁同步電動機弱磁擴速
2015-01-13 10:13:20王子函于海生
微特電機 2015年10期
關鍵詞:系統
王子函,于海生
(青島大學,青島266071)
0 引 言
交流永磁同步電動機沒有換向裝置和勵磁繞組,因而具有結構簡單、可靠性高、單位質量功率密度大、效率高等優點,所以在高精度的速度和伺服系統中得到了廣泛的應用[1-3]。許多應用場合不僅要求系統在低速時具有較大的轉矩輸出,從而能夠使系統快速起動、加速,而且還能夠在電機達到額定電壓和額定電流的情況下能夠進一步提高電機的轉速。近年來,弱磁擴速得到中外學者的廣泛關注,并且取得了許多理論成果[4-6]。文獻[4]提出了一種梯度下降法,但是該方法計算復雜,難以在實際中得到推廣。文獻[5]利用查表法實現系統的快速響應,但是該方法對數據表的精度要求很高,難以實現。文獻[6]提出了一種考慮諧波的電壓大小和相位的方法,但是該方法的速度響應慢。
近年來,非線性控制方法受到越來越多的關注,永磁同步電動機的非線性控制應用也越來越廣泛。一種基于系統能量成形的端口受控哈密頓控制方法得到中外學者的廣泛關注[7-8],端口受控哈密頓系統具有結構簡單、控制器的求取比較方便、穩態誤差小、響應快速等優點,因而具有一定的實用價值。目前采用非線性方法控制永磁同步電動機的弱磁調速很少,而采用基于能量的哈密頓非線性控制方法幾乎沒有。本文提出了一種基于能量的端口受控哈密頓(PCH)的非線性控制新方法控制隱極永磁同步電動機的弱磁擴速。實際工程中,負載轉矩并不是恒定不變的,針對這一問題設計了系統的負載轉矩觀測器。仿真結果表明,系統的弱磁擴速效果良好、響應速度快、穩態誤差小,具有良好的抑制負載擾動能力。
1 永磁同步電動機PCH 系統模型
永磁同步電動機在d,q 坐標系下的速度數學模型可表示:


式中:ud,uq分別為d 軸、q 軸定子電壓;id,iq分別為d 軸、q 軸定子電流;Jm為轉動慣量;τ 為電磁轉矩;Ld,Lq分別為d 軸、q 軸定子電感;τL為負載轉矩;Φ為永磁體產生的磁鏈;Rs為定子電阻;p 為電機的極對數;ω 為轉子的機械角速度。
取永磁同步電動機系統的哈密頓函數:

端口受控耗散哈密頓系統模型:
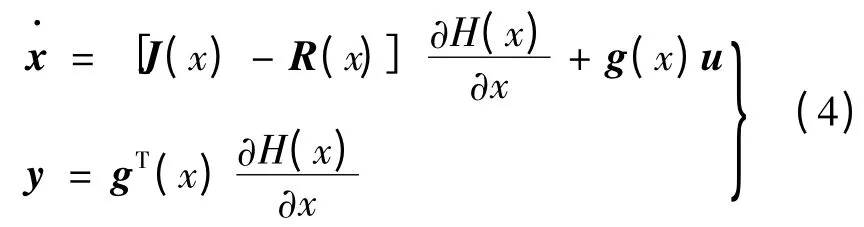
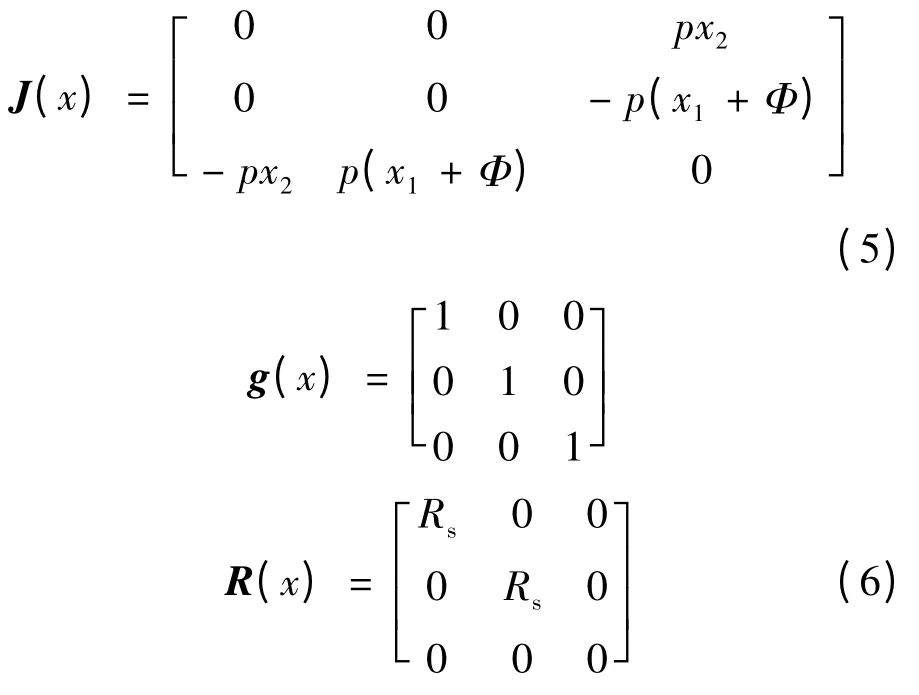
式中:x∈Rn,u,y∈Rn,R(x)為半正定對稱矩陣,R(x)=RT(x)≥0;J(x)為反對稱矩陣,J(x)=-JT(x)。將式(1)寫成式(5)的形式,可得永磁同步電動機的PCH 模型:
2 永磁同步電動機的PCH 弱磁控制原理
2.1 系統控制原理圖
基于狀態PCH 和弱磁擴速原理的永磁同步電動機速度控制系統的系統框圖如圖1 所示,其中ω0為給定轉速,τL0為給定負載轉矩。當給定轉速在基速以下采用最大轉矩/電流控制,求出系統的平衡點id0和iq0;當給定轉速在基速以上采用弱磁控制,求出系統的平衡點[9]。
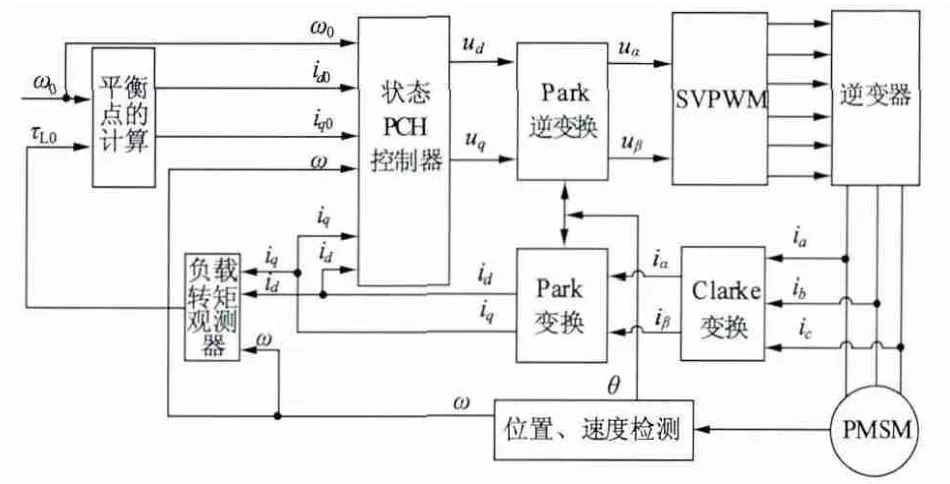
圖1 控制系統原理框圖
2.2 弱磁控制原理
針對隱極永磁同步電動機式(1)的前兩個公式知,當永磁同步電動機達到穩態運行時,電壓方程:

由于電機一般運行于較高轉速,此時定子電阻可以忽略,可得到電壓方程[10]:

在交流調速系統逆變器容量足夠大的條件下,當電機的端電壓和電機的定子電流均達到額定值時,假設在dq 坐標系下電機的額定電壓為ulim,額定電流為ilim,可以得到:
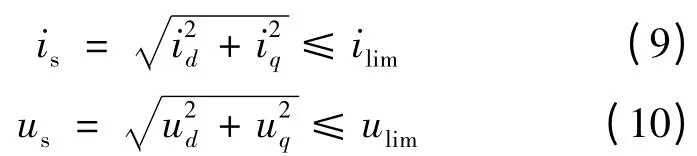
將式(8)代入式(10)可以得到電壓極限橢圓:

由式(9)和式(11)可以得到電壓極限橢圓與電流極限圓的軌跡,如圖2 所示。
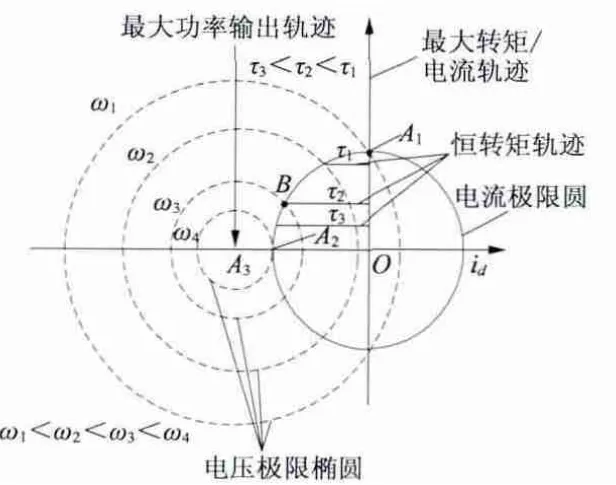
圖2 隱極永磁同步電動機的定子電流軌跡
為了延長電機的使用壽命,電機的定子端電壓和定子電流需要運行在電壓極限橢圓軌跡和電流極限圓軌跡內。如圖2 所示,A1點是電動機最大轉矩/電流軌跡與電流極限圓軌跡的交點,電機的定子電流只能在電流極限圓內,A1點所對應的轉折速度ω1就是電壓極限橢圓軌跡與電流極限圓軌跡的交點。針對隱極永磁同步電動機,最大轉矩/電流軌跡即q 軸如圖2 中OA1段,在OA1段上電動機可以以每個點在轉折速度以下(基速)作恒轉矩運行,轉折速度就是在該轉矩下電壓極限橢圓與最大轉矩/電流軌跡的交點。圖2 中的A1點是電機在輸出最大轉矩時能達到的最大轉速。由于永磁同步電動機的勵磁是永磁體產生的,所以要想繼續提高電機的轉速,只能通過調節定子電流來實現[11]。當電機運行在A1點時,要想繼續提高電機的轉速至ω3,可以讓定子電流軌跡沿電流極限圓軌跡由A1點移動至B點,此時直軸去磁電流分量增大而交軸電流分量減小,從而使電機的氣隙磁場減弱,提高了電機的轉速。
2.3 弱磁控制策略
式中:τL0為負載轉矩。將式(12)代入式(11)可得到轉折速度:
電機在基速以上即ω >ωA時,采用弱磁控制[13],此時,電壓達到額定值,由式(11)、式(12)可以得到定子電流軌跡:
3 負載轉矩恒定已知時控制器的求取
3.1 系統平衡點的確定
電機運行在基速以下即ω≤ωA,采用最大轉矩/電流原理,由式(12)知系統平衡點:
電機運行在基速以上即ω >ωA時,采用弱磁控制,由式(14)、式(15)知系統平衡點:
3.2 控制器的設計
取系統期望的哈密頓函數:
由狀態PCH 理論[14]可以求出系統的控制器,
即:
這里:
并且取:
將式(3)、式(5)、式(6)、式(18)、式(20)、式(21)代入式(19)可得系統的控制器:
由式(4)和式(22)構成的系統是漸近穩定的[15]。
4 針對負載轉矩未知時控制器的求取
4.1 負載轉矩觀測器的設計
在實際應用中,負載轉矩通常情況下是不確定并且存在擾動的。為了解決這一問題,需要設計負載轉矩觀測器,當負載轉矩恒定已知時,由式(1)、式(2)可得:
當負載轉矩不確定時,根據誤差反饋校正原理和式(23)可以得到負載轉矩觀測器:
式中:k1,k2是設計參數為估計值。定義估計誤差=ω-=τL-,由式(23)、式(24)可得觀測器的跟蹤誤差動態方程:
可以證明,選取適合的k1、k2可以確保觀測器漸近穩定,經過配置極點能夠得到良好的轉矩估計的收斂速率。由式(25)可得觀測器的極點:

4.2 控制器的設計
式(29)是漸近穩定的[15]。
5 仿真結果
永磁同步電動機的參數:d 軸和q 軸定子電感Ld=Lq=0.008 5 H,永磁體磁通Φ =0.175 Wb,極對數4,定子電阻1.5 Ω,轉動慣量J =0.001 1 kg·m2,額定電壓150 V,額定電流4 A,額定轉速150 rad/s,額定轉矩4 N·m。
在MATLAB/Simulink 上進行仿真。
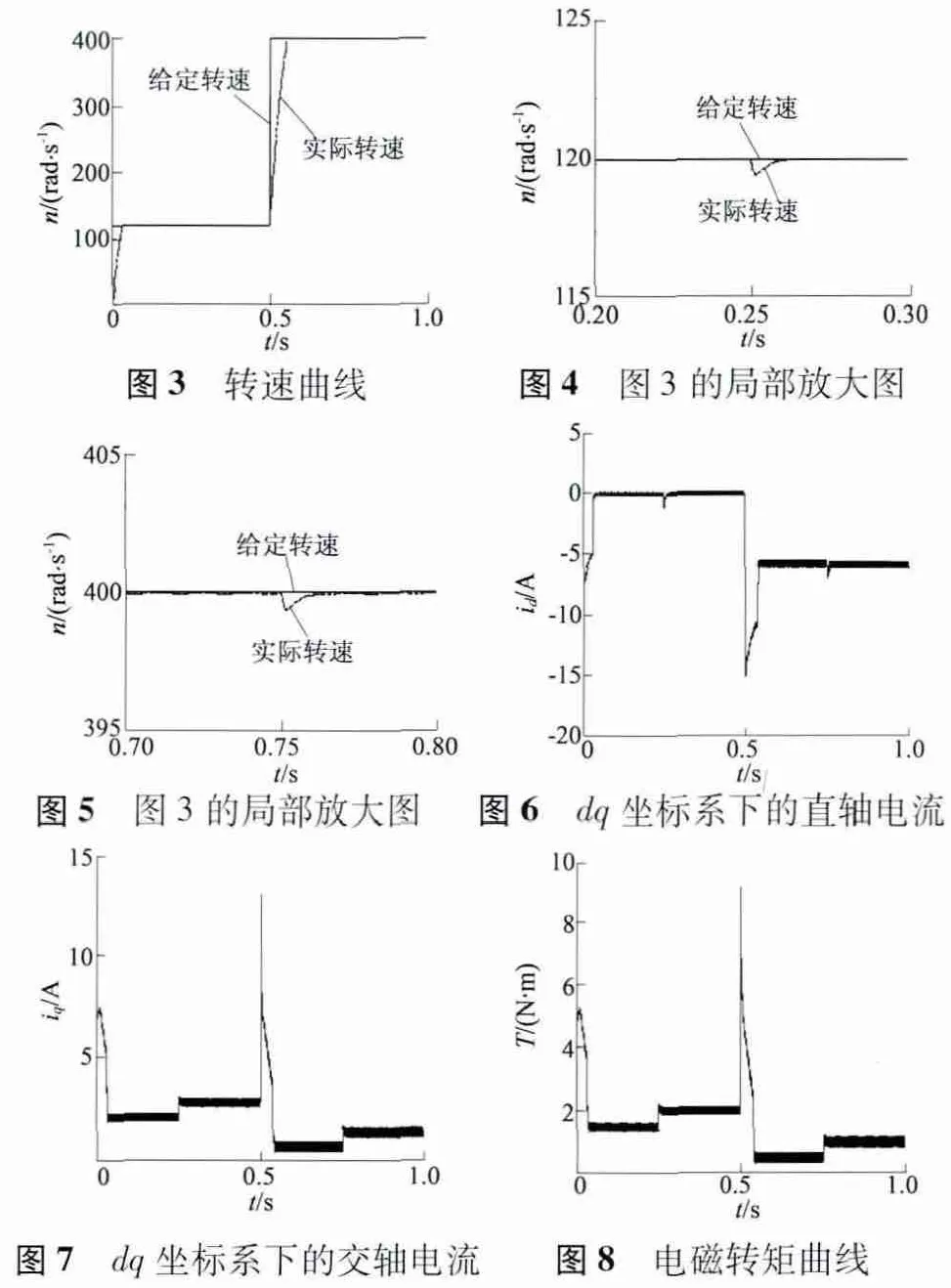
初始時刻給定轉速120 rad/s,轉矩1.5 N·m,在0.25 s 給系統一個0.5 N·m 的轉矩擾動,在0.5 s 時給定轉速400 rad/s,轉矩0.5 N·m,在0.75 s給系統一個0.5 N·m 的負載轉矩擾動。取控制器參數r1=r2=10,k=1,采用SVPWM 和IGBT 逆變器。
圖3、圖4、圖5 是電機的轉速曲線,在0 ~0.5 s,給定轉速為120 rad/s,由于120 rad/s 小于基速,所以采用了最大轉矩/電流的控制方法;在0.5 ~1 s,給定轉速為400 rad/s,由于此轉速大于基速,所以采用了弱磁控制方法。從圖4、圖5 可以看出,系統具有良好的抑制負載轉矩擾動能力,并且能夠快速到達給定位置,穩態誤差小。圖6、圖7 是在dq坐標系下的直軸和交軸電流曲線,在0 ~0.5 s 內,直軸電流為零,采用了最大轉矩/電流控制原理,在0.5 ~1 s 內,直軸電流的絕對值變大,為了使電流運行在電流極限圓內而減小交軸電流,以達到弱磁擴速的目的。圖8 是電磁轉矩曲線,在0 ~0.5 s 內,電機運行在基速以下,可以輸出較大的電磁轉矩,即可以帶動較大的負載轉矩,在0.5 ~1 s,電機運行在基速以上,為了使電機定子電流運行在電流極限圓內,必須減小交軸電流從而減小了電機的電磁轉矩,即能帶動較小的負載轉矩。
6 結 語
本文應用端口受控哈密頓控制方法,研究了永磁同步電動機弱磁擴速問題。基速以下采用最大轉矩/電流控制方法,實現了電機在低速時輸出較大的電磁轉矩;基速以上采用弱磁控制方法,可使電機在達到額定電流和額定電壓情況下達到更高的轉速。并且在負載轉矩未知時設計了負載轉矩觀測器。仿真結果表明,基于端口受控哈密頓方法的弱磁調速系統具有良好的弱磁擴速性能,系統能夠快速到達給定轉速,穩態誤差小,并且系統具有良好的抑制負載轉矩擾動的能力。
[1] LORIA A,ESPINOSA-PEREZ G,AVILA-BECERRIL S.Global adaptive linear control of the permanent magnet synchronous motor[J].International Journal of Adaptive Control and Signal Processing,2014,28(10):971-986.
[2] VIKAS K,PREMA G,MITTAL A P. ANN based self tuned PID like adaptive controler design for high performance PMSM position control[J]. Expert Systems with Applications,2014,41(17):7995-8002.
[3] 王宏,于泳,徐殿國. 永磁同步電動機位置伺服系統[J]. 中國電機工程學報,2004,24(7):151-155.
[4] 唐朝暉,丁強,喻壽益,等.內埋式永磁同步電機的弱磁控制策略[J].電機與控制學報,2010,14(5):68-72.
[5] BAE B,PATEL N,SCHUIZ S.New field weakening technique for achieving wide constant power speed operation with an interior PM alternator machine[C]//36th IEEE Industrial Application Society Annual Meeting.Chicago,USA,2001:807-814.
[6] PAUL S,FABIEN M,XAVIER K.Control strategies for open-end winding drives operating in the flux-weakening region[J].IEEE Transactions On Power Electronics,2014,29(9):4829-4842.
[7] ORTEGA R,SCHAFTB A,MASCHKEC B,et al.Interconnection and damping assignment passivity-based control of port-controlled Hamiltonian systems[J].Automatica,2002,(38):585-596.
[8] YU Hai-sheng,YU Jin-peng,WU He-rong. Energy-shaping and integral control of the three-tank liquid level system[J].Nonlinear Dyn,2013(73):2149-2156.
[9] 唐任遠.現代永磁電機[M].北京:機械工業出版社,1997.
[10] JIRI S,JAROSLAV N.FOC and flux weakening for traction drive with permanent magnet synchronous motor[J].IEEE Transaction on Industrial Electronics,2008,3(2):753-758.
[11] YUKINORI I,SHIGEO M,MASAYUKI S. Comparative study of PMSM drive systems Based on current control and direct torque control in flux-weakening control region[J].IEEE Transactions On Industry Applications,2012,48(6):2382-2389.
[12] 于海生,王海亮,趙克友.永磁同步電機的哈密頓系統建模與控制[J].青島大學學報,2005,20(3):3-6.
[13] 唐朝暉,丁強,喻壽益,等. 表面貼裝式永磁同步電機弱磁控制策略的研究[J].控制工程,2011,18(3):384-387.
[14] 劉旭東.基于無速度傳感器的永磁同步電機PCH 控制[D].青島:青島大學,2011:35-41.
[15] 于海生,趙克友,郭雷,等.基于端口受控哈密頓方法的PMSM最大轉矩/電流控制[J].中國電機工程學報,2006,26(8):82-87.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
