采用透視變換提高車輛識別準確率的方法研究
2015-01-17 05:46:38張星龍
電子設計工程 2015年1期
張星龍,馮 全
(甘肅農業大學 工學院,甘肅 蘭州 730070)
隨著經濟技術的快速發展,工業水平的不斷進步,道路上機動車的數量也在迅猛的增加。因此,為了保證交通運輸的通暢,對交通資源合理分配的要求也在不斷提高。根據對大量交通擁堵的數據統計分析得出,低效、原始的交通資源分配和管理模式是道路堵塞的主要原因,現有的道路資源并沒有得到充分的利用。由于警力有限,通過人力提高管理效能是不現實的。而基于在城市中安裝大量傳感器建立的監測網絡系統又會耗費很多不必要的經濟投入[1-2]。所以有必要開發一種低成本、低人工、高智能的現代化監控系統,代替原始、老舊的工作模式,實現車流量的統計和運動目標的識別。
文中提出了一種在交通路口監控識別機動車與非機動車的方法,主要使用背景差分法提取運動目標[3],然后對圖像進行透視變換,采用一個統一的閾值濾除行人、自行車和摩托車等非監控目標,只針對車輛進行檢測。該設計的目的是提高車輛檢測的準確性,為合理安排交通資源提供可靠、準確的統計數據,減少交通擁堵。
1 運動目標提取
本文采用背景差分法檢測交通視頻中的運動目標,該方法通過比較當前幀與背景圖像的差異實現對目標運動區域的檢測。假設B為背景幀,It是第t幀的視頻序列,則背景差分的計算公式為:

其中(i,j)為每個像素點的位置,|·|表示絕對值運算,通過計算進入檢測區域圖像與背景的差異可以檢測到運動目標的位置、大小等信息。得到的差異值需要通過閾值判斷實現二值化操作,最終確定目標的位置,二值化的計算公式為:

其中τ是閾值,即當當前幀圖像與背景圖像的差異大于該值時才被識別為運動目標。
為了克服物體移動產生的陰影、光照變化和其他運動對象的影響、天氣因素的干擾,采用了高斯混合模型[4](Gaussian Mixture Models,GMM)。該方法使用若干個高斯模型來表征圖像中各個像素點的特征,用當前圖像中的每個像素點與混合高斯模型匹配,如果成功則判定該點為背景點,否則為前景點[5]。
高斯混合模型是一種像素在時間域上的概率分布。定義t時刻X像素點的像素值Xt屬于背景像素的概率為:

在視頻監控中認為像素點是有前景、背景和陰影組成,故K一般選擇為3,協方差矩陣Σj,t可 以表 示 為·I。 其中,σj,t表示第j個高斯分布的標準差,I為單位矩陣。
圖像中每個像素點的概率分布都是由一組混合高斯函數描述的。當讀入一個新的像素值,Xt+1,Xt+1的概率一般用混合高斯模型中占主要成分的幾個分布函數來描述,并且用像素值Xt+1更新模型,從而實現背景圖像的不斷更新。
這種方法能夠很好的解決由光照突變、背景中運動物體以及場景長時間緩慢變化甚至不變以及其他外界環境所產生的影響。
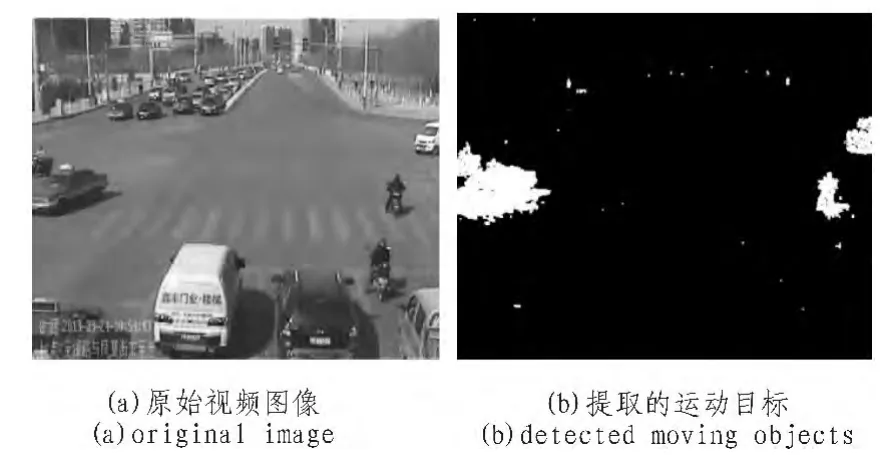
圖1 建立高斯混合模型進行運動目標提取Fig.1 Detected moving objects using Gaussian mixture model
可以從圖1中看出高斯混合模型對運動與非運動目標的提取效果。圖中上下方向為紅燈禁行狀態,左右方向為綠燈通行狀態。經過處理后,左右方向上通行的四輛機動車均被識別并效果明顯,而上下方向上停止中的機動與非機動車輛均被很好的屏蔽,但由于高斯混合模型對運動目標敏感的特性,下方運動的摩托車也被識別為機動車輛,對檢測形成干擾。
2 透視變換與非監測目標的剔除方法
智能交通系統監控視頻中包含了多種不同類型的運動目標,例如車輛(監控目標)以及行人、摩托車和自行車等(非監控目標)。在檢測機動車輛時,視頻中出現的非監控目標會產生較強的干擾。因此需要在提取車輛的同時排除以上目標的干擾,提高車輛識別的準確率。
運動目標的識別過程中,面積和顏色都是重要的參考依據[6],其中機動車的面積比較大,其次是非機動車,行人的面積最小。并且由于行人頭發顏色的原因,車輛上不會出現與人頭部面積相當的黑色區域,若是黑色汽車,則整個車身都為黑色且面積較大;若不是黑色汽車則不會出現黑色區域,所以顏色特征又能在面積特征的基礎上,進一步的確認目標的類別。
但由于攝像機的成像特性與光學原理所產生的透視效果,會導致在圖像中不同位置的目標產生透視畸變,最明顯的結果就是遠處物體明顯縮小。從而影響了基于面積和像素數量的目標識別過程,導致攝像頭遠端方向上的有效目標可能被誤判或消除,對整體識別的效果產生很大的干擾:目標識別不準確、目標計數不準確等。為了消除這方面的影響,就需要對產生畸變的圖像進行矯正。
真實坐標在攝像機像平面中成像的過程可以用數學公式表示為 A=HB,其中 A(X,Y)是真實世界坐標向量,B(x,y)是像平面坐標向量,H是變換矩陣[8]。實際情況中根據攝像頭與地面相對靜止的特點,通過手動標定,確定圖1(a)中上下方向道路與左右方向道路的白色實線和路沿延長線的4個交點為矯正參考點,將該區域變換為已知的矩形。變換過程可以具體描述為:
其中 a、b、c、d、e、f、g、h 為變換矩陣的參數。 可以看出:

展開并消除得到:

所有變換前后的一對坐標點都能夠滿足上式。通過畸變前后標定的四對相對應的控制點坐標,將坐標代入式(3)則可得出四對方程組,由8個方程解出變換矩陣的8個參數a,b,c,d,e,f,g,h。
式(3)用矩陣表示為:
根據已知變換矩陣參數,將需要變換圖像的每個像素坐標代入式(4),通過最小二乘法就能獲得變換后的坐標。
視頻圖像中,透視變換對于較遠的物體會產生較大畸變,解決交通路口的實際問題中,需要結合實際問題,選擇畸變較小的區域;此外選擇特定區域也在一定程度上減少了需要處理的目標數量。本文的監控區域圍十字路口,選擇的監控區域圍圖像從下往上約2/3的圖像區域 (即圖2(a)虛線以下區域),在該范圍內的目標由于透視效應,非監測而目標(如圖2(a)白色箭頭所指位置)的尺寸相差較大。而變換后的圖像模矯正了透視畸變,使非監測目標之間的尺寸較為接近,而與機動車的尺寸則相差較大(見圖2(b))。這樣,可以據每個運動目標區域面積和長寬比,剔除非監測目標。
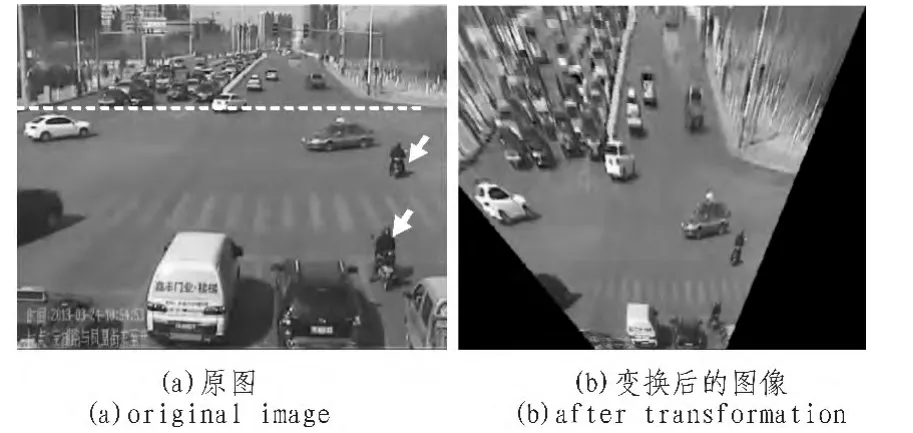
圖2 透視變換Fig.2 Perspective transformation
在檢測車輛的同時,對檢測到的行人和非機動車進行反向剔除處理,具體方法為:若運動對象面積小于閾值T1且高寬比大于閾值T2,則認為是非監測目標,將這一部分運動區域與之前高斯混合模型提取的運動前景圖像做二次差分運算,消除掉非機動車的干擾,最終達到提高機動車檢測準確率的目的。例如,圖3(a)中,在監視區域,運動目標有3個,分別是圖像中部的出租車以及一輛自行車和一輛摩托車(后者在圖中的白色箭頭處),后者距攝像頭的距離相差較大,故在圖像中尺寸相差也較大。圖3(b)給出了這3個對象經過運動目標檢測和透視變換后的情況,可以看出中的兩個干擾目標尺寸相近。圖3(c)給出用相同的閾值將它們剔除后的圖像。
3 實驗結果
根據本文提出的方法,通過在銀川市寶湖路與鳳凰街路口采集到的一段時長90秒、每秒20幀的視頻,在Matlab2013b的環境中進行了測試。測試結果如表1所示。
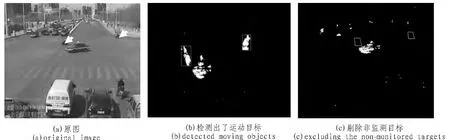
圖3 不同位置的處理效果比較Fig.3 Comparison of the effects in different locations
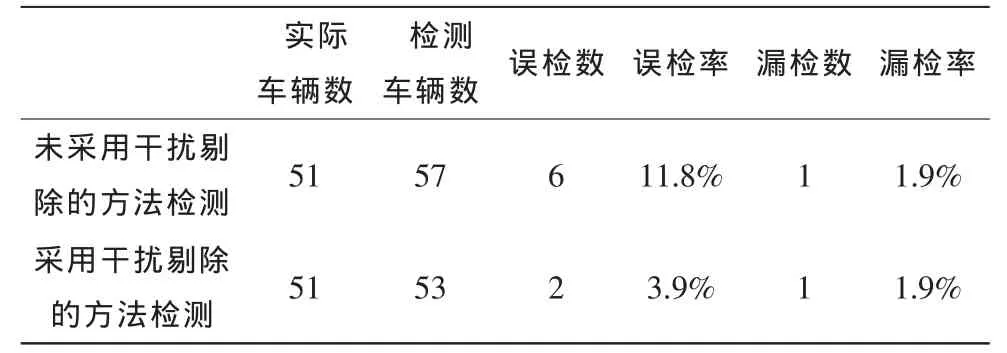
表1 程序檢測運行結果Tab.1 Test result of prgram
4 結論
實驗結果表明,該方法對提高識別車輛是有效的,與傳統的直接車輛檢測方法相比,本方法優化了運行的結果,排除了可能存在的干擾,有效的降低了誤檢率。采用了改進算法后仍然存在少量誤檢與漏檢,其中誤檢來源與非機動車目標在圖像中較為接近,受視頻質量的限制無法區分;漏檢來源與目標運動速度極其緩慢,是由高斯混合模型的特性對此并不敏感導致的。在試驗中,由于圖像質量和處理方法的不同,會對目標的識別、實驗的結果產生很大影響。因此,不斷的優化算法,
提高圖像處理的精度和速度也是今后需要改進的方向。
[1]ZHANG W,Tan G,Ding N,et al.Vehicle classification algorithm basedonbinaryproximitymagneticsensorsand neural network[C]//11th International IEEE Conference on Intelligent Transportation Systems,2008:145-150.
[2]Munoz-Ferreras Ma J,Perez-Martinez F,Calvo-Gallego J,et al.Traffic surveillance system based on a high-resolution radar[C]//IEEEtransactionson geoscienceand remote sensing,2008:1624-1633.
[3]陳鳳東,洪炳镕.基于動態閾值背景差分算法的目標檢測方法[J].哈爾濱工業大學學報,2005,37(7):883-885.CHEN Feng-dong,HONG Bing-rong.Object detecting method based on background image difference using dynamic threshold[J].Journal of Harbin Institute of Technology,2005,37(7):883-885.
[4]Haque M,Murshed M,Paul M.A hybrid object detection technique from dynamic background using gaussian mixture models[C]//10th Multimedia Signal Processing,2008:915-920.
[5]張偉.基于DM6446的視頻運動車輛及交通流量監測系統研究[D].杭州:杭州電子科技大學,2010.
[6]王琪.關于運動目標特征提取車輛顏色識別算法的研究[D].成都:電子科技大學,2011.
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
