GEOSAR 相位定標附加相位估計方法?
2015-01-22 09:47:41張浩龍朱雪瑩胡文龍
雷達科學與技術 2015年4期
張浩龍,江 冕,朱雪瑩,胡文龍
(1.中國科學院空間信息處理與應用系統技術重點實驗室,北京100190;2.中國科學院電子學研究所,北京100190;3.中國科學院大學,北京100049)
0 引言
地球同步軌道合成孔徑雷達(Geosynchronous Synthetic Aperture Radar,GEOSAR)相位定標系統具有十分重要的應用價值,它通過一個位置精確已知的地面站系統發射線性調頻信號,經過運行于地球同步軌道的衛星轉發后發回地面站,然后由地面站對其進行處理。而相位定標,即通過信號處理的方法從地面站接收到的信號中提取相位的過程,其重要意義在于可以為成像后期處理提供精確的相位基準參考。然而,信號經過長距離的傳輸后,地面站接收到信號的信噪比可能并不能達到精確的相位定標要求。為了能夠對此量化分析,本文先考察一下目前主要的測軌系統接收機接收的信號信噪比。
目前主要的測軌系統(或者具備測軌功能)包括GPS系統、DORIS(Doppler Orbiting and Radiopositioning Integrated by Satellite)系統、CAPS(China Area Positioning System)系統等。CAPS系統是基于同步軌道(GEO)衛星的轉發式衛星導航系統[1-2],根據文獻[3]可知信號到達CAPS系統接收機的信噪比大約為-26.7 d B。對于運行于近地軌道的GPS系統和DORIS系統,根據文獻[4]和文獻[5]可以看出,在通常情況下,系統接收機的接收信噪比都在-10 dB左右。如果將GPS系統和DORIS系統都運行在地球同步軌道上,則根據衰減功率與距離的關系P∝1/R2(單程),很容易算出由于距離帶來的功率下降大約在-30 d B,那么最后接收到的信號功率顯然會低于-40 dB。而GEOSAR定標系統如果采用與上述系統類似的接收和發射設備,則必然也會存在弱信噪比的問題。而弱信噪比會給GEOSAR相位定標系統帶來影響,一個提高信噪比的有效方法就是對信號進行相干積累,但在長時間積累過程中會給信號帶來一個非線性的附加相位調制。
容積卡爾曼濾波器(Cubature Kalman Filter,CKF)[6-7]是Arasaratnam等人于2009年提出的一種新的濾波方法,其既不需要對函數進行線性化,也不需要計算Jacobin矩陣,因此在非線性條件下依然具有較好的估計精度。本文擬采用CKF方法來解決非線性較強條件下的附加相位估計問題,然后在此基礎上構造匹配濾波器對信號進行匹配濾波,從而實現信號的相干積累。
1 影響GEOSAR相位定標系統相干積累的因素
由以上分析可以看出,在信噪比低于一定值的情況下,提取到的相位可能帶有較大的估計誤差。事實上,根據Shimon Peleg和Boaz Porat的研究成果[8],有以下關系成立:
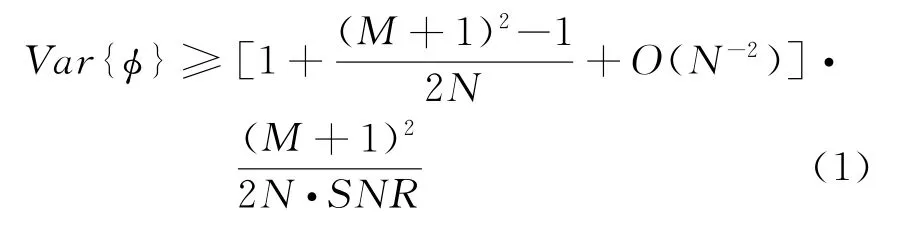
從式(1)可以看出,相位估計的方差受制于信號的SNR大小。
為了能夠提高相位估計精度,根據式(1)可知,必然需要提高信噪比。根據吳順君和梅曉春在文獻[9]中所推導出的結果,脈沖壓縮輸出脈沖信號峰值功率與輸入脈沖信號功率之比為

式中,B為輸入信號帶寬,T為有效脈沖寬度。
在GEOSAR相位定標系統中,信號帶寬B為固定值,因此只能通過相干積累的方法去提高信號的信噪比。根據式(2)可以知道,如果想要將信噪比提高20 dB,則需要積累到原先時間長度的100倍,而要將信噪比提高30 dB,則需要積累到原先時間長度的1 000倍。下面分析一下在長時間相干積累條件下影響積累的因素。首先假設在N個連續PRT時間內接收到了N個回波信號,如下所示:
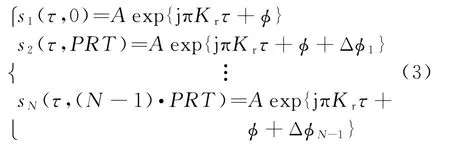
在信噪比條件比較差的情況下,需要對上述N個信號進行相干積累,即需要將N個信號組織為一個新的信號,如下所示:

如果能夠對saccul進行匹配濾波,此時新的信號的脈沖寬度等效于Tobs,Tobs=NTr,因此根據式(2)可知,若能夠進行相干積累則顯然可以提高信噪比,從而根據式(1)可知,便可以得到一個更為準確的相位估計。然而由式(3)又可以看出,如果要進行相干積累,則必須要補償式(3)中由于軌道 運 動 帶 來 的 附 加 相 位 Δ?1,Δ?2,Δ?3,…,Δ?N-1。為此,需要分析一下GEOSAR的運動情況。圖1為一軌道傾角為60°,近地點幅角為90°,升交點赤經為120°的地球同步軌道的“8”字形星下點軌跡圖。
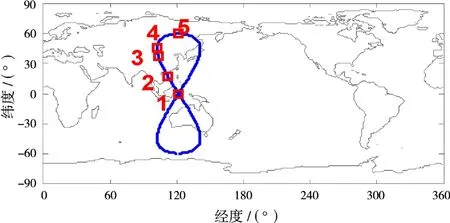
圖1 地球同步軌道“8”字形星下點軌跡圖
由圖1可以看出,衛星從1運動到2時與由3運動到5時,明顯線性度是不一樣的,因此帶來的附加相位Δ?1,Δ?2,Δ?3,…,Δ?N-1在1~2段和3~5段也是不一樣的。圖2為分別用線性函數對1~2段和3~5段進行模擬后的誤差對比。
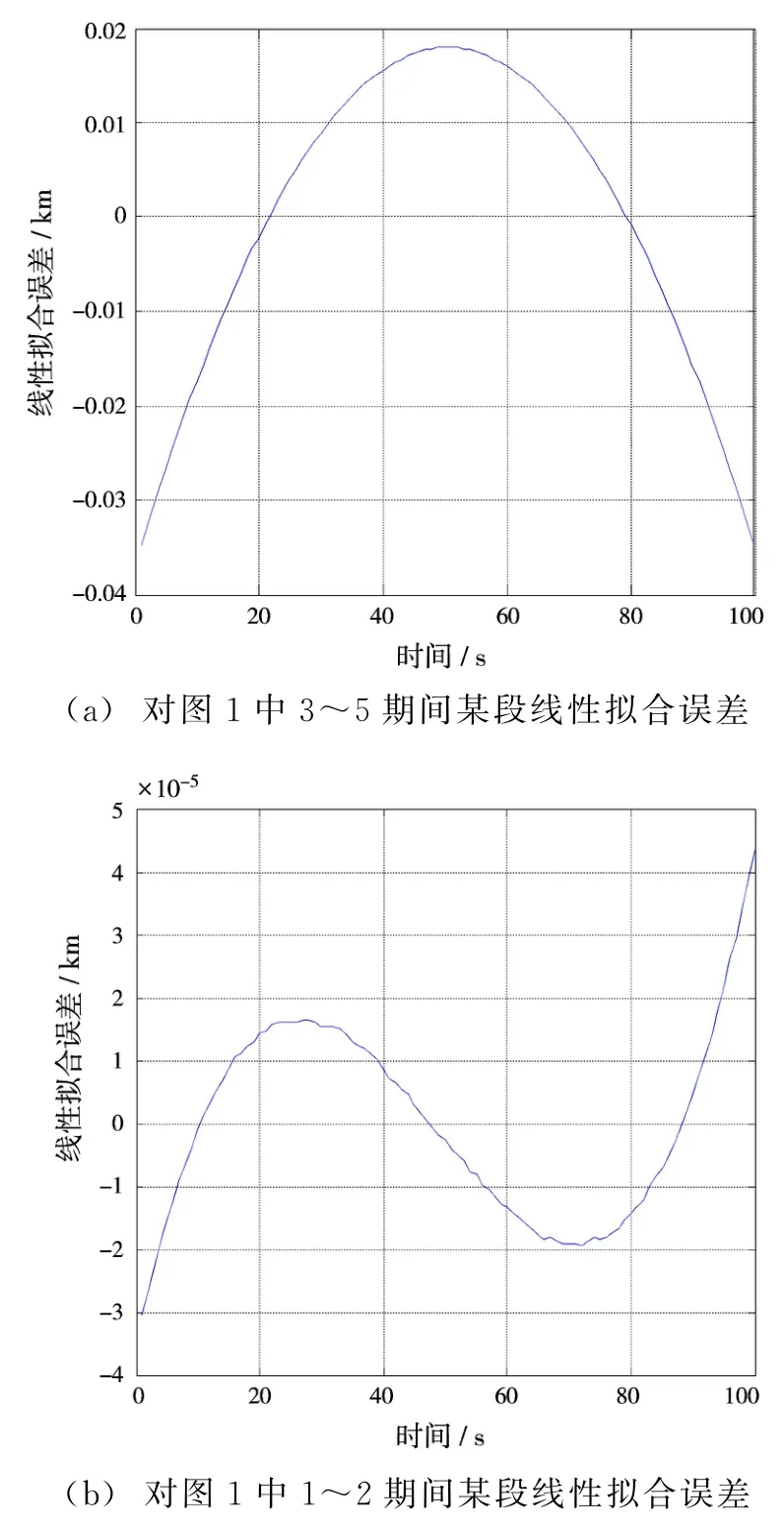
圖2 1~2段和3~5段線性擬合誤差對比
由圖2的對比可以看出,在衛星運動非線性比較強的區域,用線性擬合的誤差明顯大于衛星運動的非線性區域。這說明當使用線性模型(比如擴展卡爾曼濾波,即EKF)對衛星運動非線性區域進行處理時必然導致較大的誤差。為此,下文提出了利用容積卡爾曼濾波方法來解決長時間積累的非線性問題。
2 采用容積卡爾曼濾波方法解決長時間積累的非線性問題
容積卡爾曼濾波器的核心在于利用帶權重的采樣點近似概率分布,通過球面積分方法求隨機變量與函數乘積的積分,進而估計變量的均值和方差。與傳統應用很廣的擴展卡爾曼濾波(Extended Kalman Filter,EKF)相比,CKF既不需要對函數進行線性化,也不需要計算Jacobin矩陣。所以,理論上來說,CKF具備更優的非線性逼近性能、數值精度以及濾波穩定性。在隨后的仿真實驗中可以發現,在圖1的3~5段中如果采用EKF會帶來較大的誤差,而CKF對于圖1的3~5段較強的非線性依然具有較好的處理結果。
為了使用容積卡爾曼濾波估計上述Δ?1,Δ?2,Δ?3,…,Δ?N-1,需要先建立狀態方程,事實上,地球同步軌道衛星除了受到地球中心引力以外,在軌運行時還受到其他攝動力的作用。考慮到其他攝動力,衛星的運動方程可以寫成:

將式(6)離散化后便可以根據CKF算法估計軌道運動附加相位。
2)CKF首先根據Cubature變換得到2n個具有相同權值的Cubature點來近似積分:

式中:m表示容積點總數,采用三階容積原則時容積點總數是狀態維數的2倍,即m=2n,n為系統的狀態維數;[1]j表示容積點集中的第j個元素。
3)時間更新
① 計算容積點

式中,Sk-1=chol{Pk-1},Pk-1為協方差矩陣,chol{}表示對矩陣進行Cholesky分解,即
② 計算通過狀態方程傳播的容積點

③ 狀態預測

④ 協方差預測

4)量測更新
① 計算容積點

② 計算通過測量方程傳播的容積點以及量測預測

③ 估計新息協方差以及互協方差
④ 估計卡爾曼增益以及狀態更新

⑤ 估計協方差

得到Pk后,便可以按照上述流程遞歸地進行下去。值得一提的是,初始參數的選擇對濾波結果的影響也十分重要,比如初始狀態協方差的確定、系統噪聲矩陣的確定等,具體可以參照文獻[11]的研究結果。
在得到對軌道運動附加相位Δ?1,Δ?2,Δ?3,…,Δ?N-1的估計之后,便可以根據此估計構造參考函數如下:

接著即可利用式(20)對式(4)進行匹配濾波得到最終所需的?。
3 仿真與分析
3.1 仿真實驗處理
為了驗證上述算法的有效性,本文用STK生成了一組地球同步軌道數據,軌道參數為:軌道傾角為60°,近地點幅角為90°,升交點赤經為120°,偏心率為0,半長軸為42241 km,同時在仿真時加上了衛星攝動的影響。在利用上述軌道數據生成SAR定標信號時,采用了文獻[12]所提出的星載SAR回波信號仿真方法,其中雷達參數如表1所示。
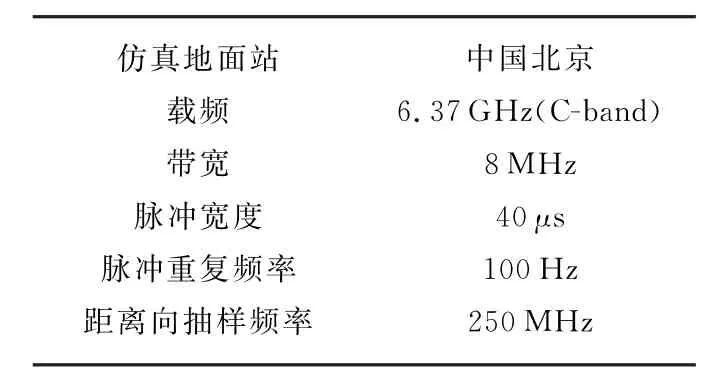
表1 雷達參數
本文針對圖1所示的1~2段(衛星運行線性段)以及3~5段(衛星運動非線性段)兩段數據分別使用EKF和CKF算法進行估計,EKF的具體實現參照文獻[13]。圖3為在衛星軌道運行線性比較理想的情況下分別采用CKF與EKF去估計Δ?1,Δ?2,Δ?3,…,Δ?N-1時的估計誤差對比圖,而圖4為在衛星軌道運行非線性比較強的情況下分別采用 CKF與 EKF去估計 Δ?1,Δ?2,Δ?3,…,Δ?N-1時的估計誤差對比圖。
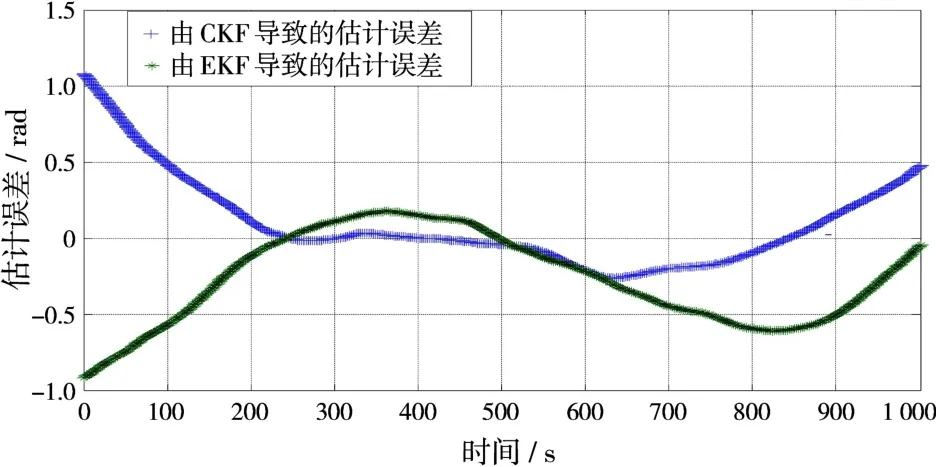
圖3 在衛星線性運動區域由CKF估計的相位誤差與由EKF估計的相位誤差對比
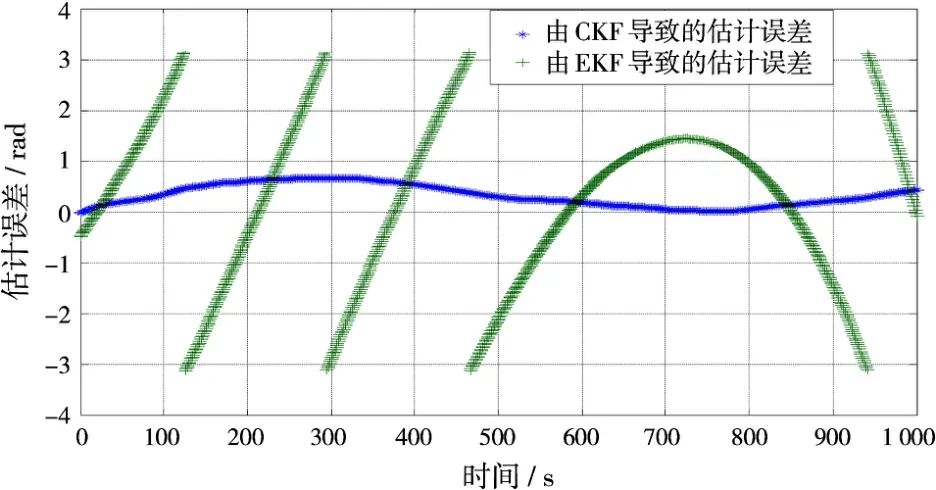
圖4 在衛星非線性運動區域由CKF估計的相位誤差與由EKF估計的相位誤差對比
在得到對Δ?1,Δ?2,Δ?3,…,Δ?N-1的估計之后,便可以根據式(7)對信號進行相干積累。為了看出CKF算法相對于EKF算法對于相干積累最后結果的優越性,本文針對衛星非線性運動比較強的地方,分別采用CKF與EKF進行相干積累之后,然后對比一下其對于相位定標的影響。其中信號信噪比為-36 dB,積累長度N為100,并分別作了以下3條曲線對比,一條曲線為不使用相干積累直接使用單脈沖壓縮后得到的相位?的誤差,一條曲線為采用CKF估計出Δ?1,Δ?2,Δ?3,…,Δ?99之后采用相干積累得到的相位?的誤差,一條曲線為采用 EKF估計出 Δ?1,Δ?2,Δ?3,…,Δ?99之后采用相干積累得到的相位?的誤差,如圖5所示。
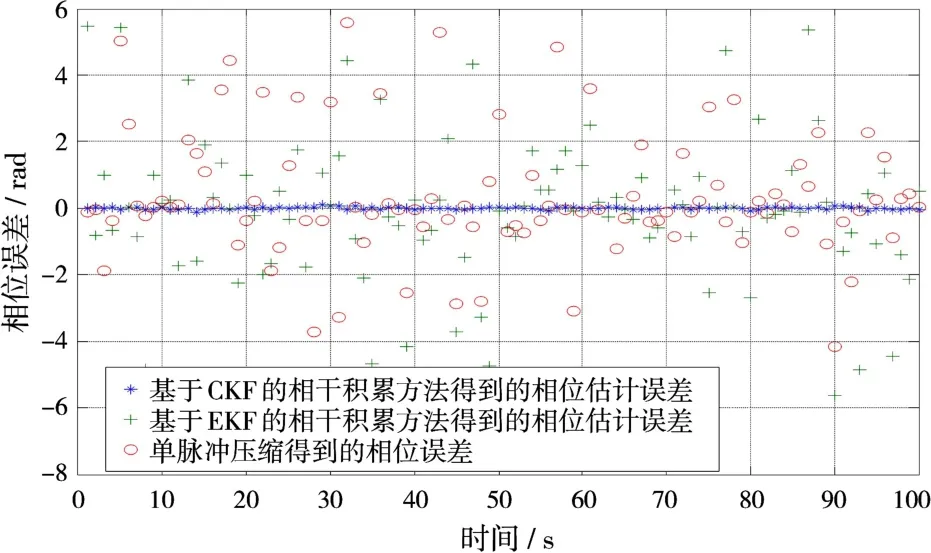
圖5 CKF、EKF和單脈沖壓縮結果對比
3.2 結果分析
圖3和圖4對比表明:CKF與EKF方法在衛星軌道運行線性度很好的時候對Δ?1,Δ?2,Δ?3,…,Δ?N-1的估計誤差是相差不大的,但是當衛星軌道運動非線性十分明顯的時候,兩種方法的差異便十分明顯,這實際上由于EKF忽略高階項所導致的誤差,由此可見,CKF在解決非線性問題時依然具有十分高的估計精度。在得到對Δ?1,Δ?2,Δ?3,…,Δ?N-1的估計后,便可以進行N個脈沖的相干積累了,圖5是在衛星軌道運動非線性十分明顯的時候,利用CKF、EKF和單脈沖壓縮之后的結果對比圖,從圖中可以明顯看到CKF的優勢,計算上述三種方法的均方誤差分別如下:E(?CKF-?real)2=0.387,E(?EKF-?real)2=5.318,E(?Single-?real)2=3.929。通過對比可以發現,結合CKF的相干積累方法比之單脈沖壓縮方法可以顯著地降低估計方差,而結合EKF的相干積累方法的方差甚至比單脈沖壓縮方法的方差都大,這是由于EKF算法截去高階項引入的誤差。由圖5也可以看出,在非線性較強的區域,EKF對附加相位的估計偏差十分大,因此給最終的相位估計也帶來了估計誤差。通過以上對比可以發現基于CKF的相干積累方法是有效的。
4 結束語
CKF有效地避免了EKF中截去高階項所帶來的誤差,因此在長時間積累過程中的非線性較強的區域依然有很好的估計精度。仿真結果表明,在衛星軌道運動線性程度比較好的區域,CKF算法與EKF算法對軌道運動附加相位的估計是相差不大的,但是在衛星軌道運動非線性較強的區域CKF算法得到的估計尤其優于EKF算法。利用上述結果,本文在衛星軌道非線性較強的區域進行100個波形的相干積累,基于CKF的相干積累算法由于能夠對附加相位有較為準確的估計,因此利用此準確的附加相位構造的匹配濾波器去壓縮信號時,可以較好地實現相干積累,從而得到了較為準確的相位估計值,而基于EKF的相干積累算法由于在非線性區域EKF對附加相位較大的估計偏差,導致相干積累后的結果并不理想。同時,與未采用相干積累方法即單個脈沖壓縮時比較,相干積累方法確實可以提高相位估計精度。
[1]AI G,SHI H,WU H,et al.A Positioning System Based on Communication Satellites and the Chinese Area Positioning System(CAPS)[J].Chinese Journal of Astronomy and Astrophysics,2008,8(6):611-630.
[2]艾國祥,施滸立,吳海濤,等.基于通信衛星的定位系統原理[J].中國科學(G輯),2008,38(12):1615-1633.
[3]盧曉春,吳海濤,邊玉敬,等.中國區域定位系統信號體制[J].中國科學(G輯),2008,38(12):1634-1647.
[4]WU Hua-bing,HU Yong-hui,MA Hong-jiao,et al.Fast Acquisition of GPS Signal in Low SNR Environments[C]∥International Conference of China Communication,Guangxi:Scientific Research,2010:393-397.
[5]AURIOL A,TOURAIN C.DORISSystem:The New Age[J].Advances in Space Research,2010,46(12):1484-1496.
[6]ARASARATNAM I,HAYKIN S.Cubature Kalman Filters[J].IEEE Trans on Automatic Control,2009,54(6):1254-1269.
[7]ARASARATNAM I,HAYKIN S,HURD T R.Cubature Kalman Filtering for Continuous-Discrete Systems:Theory and Simulations[J].IEEE Trans on Signal Processing,2010,58(10):4977-4993.
[8]PELEG S,PORAT B.The Cramer-Rao Lower Bound for Signals with Constant Amplitude and Polynomial Phase[J].IEEE Trans on Signal Processing,1991,39(3):749-752.
[9]吳順君,梅曉春.雷達信號處理和數據處理技術[M].北京:電子工業出版社,2008.
[10]章仁為.衛星軌道姿態動力學與控制[M].北京:北京航空航天大學出版社,1998.
[11]WOFFINDEN D C.On-Orbit Satellite Inspection Navigation andΔv Analysis[D].Cambridge,MA:Massachusetts Institute of Technology,2004.
[12]王泉祥,趙擁軍,黨同心.星載合成孔徑雷達回波信號的仿真[J].雷達科學與技術,2005,3(2):96-100,118.
[13]MATZUKA B,AOI M,ATTARIAN A,et al.Nonlinear Filtering Methodologies for Parameter Estimation[EB/OL].[2012-07-19].http:∥ww w.ncsv.edu/crsc/reports/ftp/paf/crsc-tr12-15.pdf.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34