空間進動目標寬帶極化相關特性研究?
2015-01-22 09:47:43李永禎王雪松肖順平
雷達科學與技術 2015年4期
關鍵詞:測量
程 旭,李永禎,王雪松,肖順平
(1.國防科技大學電子信息系統復雜電磁環境效應國家重點實驗室,湖南長沙410073;2.國防科技大學理學院,湖南長沙410073)
0 引言
彈道導彈的整個飛行過程可以分為上升段、中段和再入段三個階段。在這三個階段中,中段飛行由于時間長、狀態穩定,在目標識別和打擊中占有重要地位。由于此時導彈在大氣層外飛行,同時出于姿態控制的需要,彈頭會以進動方式飛行來實現以一定的攻角再入大氣層,所以處于中段飛行的彈道導彈也稱作空間進動目標。對空間進動目標進行監測和識別的主要設備是地基/海基防御雷達,如美國國家導彈防御系統中的地基防御雷達(Ground Based Radar,GBR)、海基X波段雷達(Sea-Based X-Band Radar,SBX)等。由于空間進動目標探測的難度系數高,所以防御雷達要能夠提供較高的分辨率、多元的特征量用于目標識別,寬帶極化測量方式是可資利用的重要測量方式。據報道,美國的GBR系統即采用寬帶極化測量方式。當前對于這種測量方式普遍采用的是分時極化測量體制,該體制利用連續兩次觀測來得到目標的完整極化信息,但高速機動目標的極化特性在這期間可能發生嚴重的去相關效應,從而使該種極化測量體制產生較大的測量誤差。為此,需研究空間進動目標測量時分時極化雷達脈沖重復間隔(PRI)設計問題。這需要兩部分工作:
第一步是分析目標的極化去相關特性,建立對空間進動目標極化特性的初步認識。具體來說,就是由于目標極化特性敏感于觀測視線,很小的觀測角度變化可能會引起極化散射特性較大的改變。因此在對空間進動目標進行觀測時,由于觀測視線連續改變,其極化散射信息將不能用單一的極化散射矩陣來表示,而是需要用時變的極化散射矩陣來描述,然后分析不同采樣單元間的極化相關性。在這個研究方面,文獻[1]利用4個彈頭模型的暗室測量數據分析了它們在不同觀測角下的極化相關特性,據此將其劃分為極化慢起伏目標和極化快起伏目標。
第二步是將目標置于典型的攻防場景中,通過獲取空間進動目標動態全極化回波分析其極化相關特性,從而可進一步選擇雷達PRI。本文作者于先前研究了空間進動目標的窄帶極化相關特性,并給出典型場景下窄帶極化測量的雷達PRI參數[2]。然而目標的窄帶極化散射矩陣只是反映了目標宏觀極化散射特性,相較之下,目標的高分辨極化特性可進一步刻畫目標的精細物理結構[3-4]。因此,研究目標的寬帶極化相關特性對于指導寬帶極化雷達設計更具現實意義。
基于以上陳述,本文立足于研究空間進動目標測量時寬帶分時極化雷達PRI設計問題。首先給出寬帶極化相關特性及物理意義,其次利用4個空間進動目標縮比模型的暗室數據分析了其相對姿態角的高分辨極化相關特性;然后基于一種空間進動目標動態全極化回波仿真模型,生成典型戰情下的仿真全極化雷達回波的基礎上,分析空間進動目標的寬帶極化相關特性,并以此為設計準則分析討論了分時極化測量條件下空間進動目標測量的雷達PRI選擇問題,對導彈防御全極化雷達系統的構建具有一定的參考價值。
1 寬帶極化相關特性的定義及其物理意義
對于運動目標,由于目標相對于雷達觀測視線的改變,目標極化特性和觀測條件通常并非固定不變,而是呈現出一定的時變規律。圖1為雷達直角坐標系下雷達與目標的位置關系,對于確定的雷達目標,其極化散射矩陣取決于觀測中心頻率f0、帶寬B和觀測視線角?,其中?為雷達視線與目標鼻錐方向的夾角。
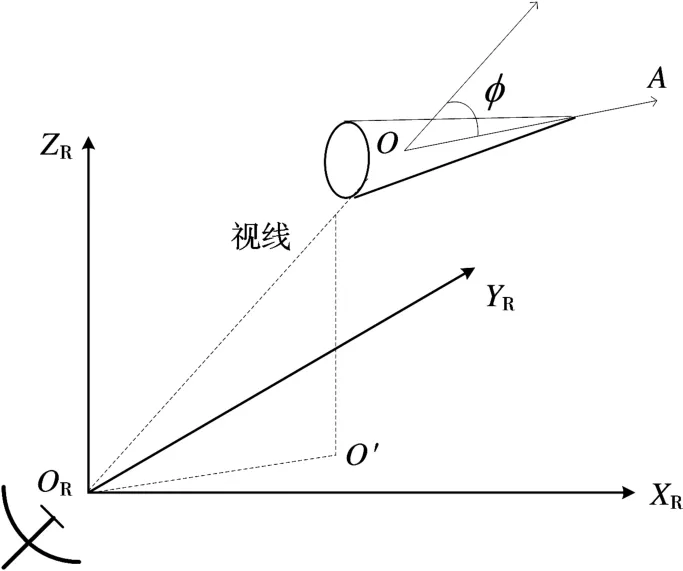
圖1 雷達與目標間視線角關系示意圖
不失一般性,假定極化雷達采用H、V極化天線,目標由L個散射中心組成,參考中心為P,第l個散射中心與P點的距離為rl,對應的相對延時為其中l=1,2,…,L,c為光速。目標在ij極化狀態組合的時域沖擊響應可表示為

式中,i,j∈{H,V},則目標的時域極化散射矩陣為

式中,S(t)為目標的全極化時域散射矩陣,Sl為各個散射中心的極化散射矩陣,即

對式(2)作傅里葉變換可以得到目標的全極化頻率響應矩陣,為

由于目標回波延時與距離相對應,式(2)表示的目標時域極化散射矩陣反映了目標散射中心在空間分布上的全極化信息。對于空間進動目標,寬帶測量可獲得目標的高分辨一維距離像(High Resolution Range Profiles,HRRP)。設全極化寬帶雷達在某次測量時間內得到的HRRP為

式中,Sij(n)為目標在ij極化通道的HRRP,p(·)為點擴展函數,n為空間位置矢量。
目標全極化HRRP是指目標四路極化通道(HH/HV/VH/VV)的HRRP,對目標的全極化HRRP,可將其在Pauli矩陣基下展開,表示成極化散射矢量的形式,即Pauli分解[1]。已知Pauli矩陣基為

對于式(5)中的S,對其進行Pauli分解,有

不妨設目標在視線角?0下的Pauli散射矢量為kp(?0,r),在視線角?0+Δ?下的Pauli散射矢量為kp(?0+Δ?,r),則目標全極化HRRP的歸一化相關系數定義為
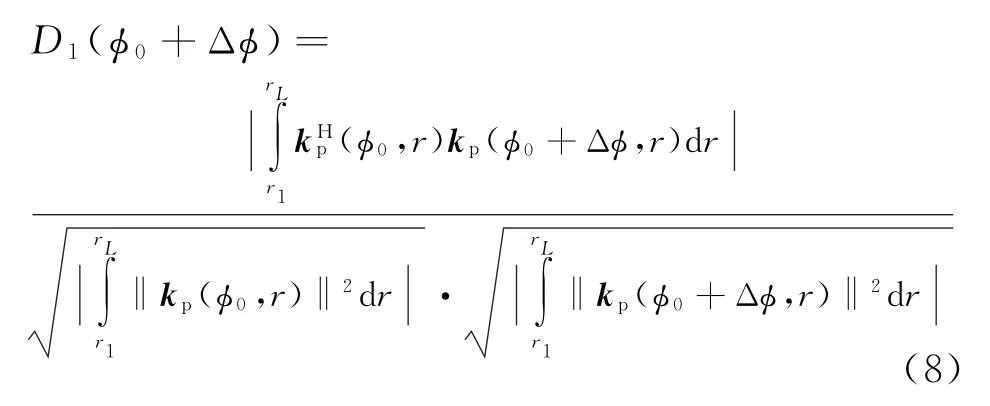
式中,0≤D1≤1,反映了目標寬帶極化特性在兩個不同觀測角度下的相關性。其值越小,兩者的相關性越弱;其值越大,兩者的相關性越強。
相應地,設目標在雷達觀測時間點t0時刻的極化散射矢量為kp(t0,r),t0+τ時刻的極化散射矢量為kp(t0+τ,r),那么不同觀測時間下的極化相關系數為
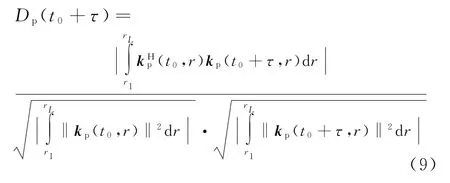
D2同樣滿足D2∈[0,1],不同于D1的是,它反映了目標寬帶極化特性在兩個觀測時刻下的相關程度。
2 空間進動目標隨姿態角變化的寬帶極化相關特性
本節對空間進動目標隨姿態角變化的寬帶極化相關特性進行分析。換言之,是在考慮典型攻防場景之前對目標去極化效應進行初步考察。空間進動目標選用如圖2(a)~(d)所示的圓錐體(YZ)、無縫錐球(ZQWFX)、無翼彈頭(WYDT)和有翼彈頭(YYDT)的暗室測量數據。上述目標暗室測量時以目標鼻錐方向為軸線,從0°方位角以0.2°為間隔到180°方位角,測量頻率為8.75~10.75 GHz,步進帶寬B=20 MHz。目標進動參數設置為進動頻率fm=2 Hz,進動角θm=7°。
圖2 4類彈頭目標的暗室測量模型
圖3給出了4類目標寬帶極化相關系數分別在視線角?0=0°,30°,60°,90°和120°處隨相關角度Δ?在0°~20°范圍內、角度步進間隔0.2°下的變化曲線。根據圖3可知:
1)錐球的極化特性對姿態角的敏感程度最小,當其相對雷達視線角改變20°時,極化相關度均在0.5以上。
2)圓錐的極化穩定度次之,在其相對雷達視線角改變3°以內,極化相關度能保持在0.5以上,但視線角繼續增加,極化相關度急劇下降,去極化效應明顯增強。
圖3 空間進動目標寬帶極化相關系數隨角度變化曲線
3)對于結構較復雜的無翼彈頭、有翼彈頭,極化特性的非規律性較前錐球、圓錐明顯增強,即使發生極小的視線角改變,其極化特性就產生較大的變化。
4)雷達目標視線角?與極化散射矩陣S并非一一對應。
3 典型攻防場景下空間進動目標寬帶極化相關特性分析
3.1 空間進動目標動態全極化回波模擬
逼真的仿真場景支撐是特性分析和評估的基礎[5-7],本文利用空間進動目標動態全極化回波仿真平臺生成回波數據,用于極化特征分析。由于該仿真方法并非本文工作重點,故不贅述,給出的簡要仿真流程如圖4所示,具體內容可參見文獻[7]。目標模型和雷達測量參數如上節所述,另有導彈發射點位置設置為62.45°E,14.61°N,高度為0 km;關機點速度為4 km/s,高度為60 km,傾角為30°;雷達部署在79.02°E,15.05°N,高度為0 km。
圖4 空間進動目標全極化回波的仿真流程圖
未對本文仿真建立直接認識,給出的攻防態勢如圖5(a)所示,圖中直觀清晰地顯示了導彈發射點、落點以及雷達布站位置(為了不涉及政治敏感因素,發射點和落點選擇在海上,并不影響學術研究)。圖5(b)為目標距地面距離隨時間變化曲線。
圖5 導彈飛行軌跡圖
圖6(a)為目標相對雷達的平均視線角(雷達視線與目標進動軸間夾角)的變化曲線,圖6(b)為目標相對雷達視線角?變化曲線。由圖6(a)可見,目標與雷達間的平均視線角隨時間先由一個較低的角度(33.68°)下降到最低點(6.44°),然后再迅速提高至152.22°。對比圖6(a)和圖6(b),由于微運動的存在,目標的姿態變化明顯較沒有微運動的情況劇烈,疊加微運動后的目標相對雷達視線角變化可看作在平均視線角的慢變過程上疊加了一個小角度的快變過程。
3.2 空間進動目標寬帶極化相關特性分析
在目標動態特性數據生成的基礎上可對其寬帶極化相關特性進行分析。空間進動目標的運動包括質心的平動和彈體繞進動軸的進動,本節將通過仿真實驗分析平動和進動對寬帶極化去相關效應的影響,然后進一步從相關性的角度分析寬帶極化特性測量時分時極化測量雷達PRI選擇問題。如圖7所示,取彈道全程中的4個時間段T1~T4進行分析:T1為發射后90~140 s,T2為發射后250~300 s,T3,T4分別為發射后400~450 s和500~550 s,分別取相應時間段內的目標全極化回波計算極化相關系數均值。
圖6 空間進動目標飛行過程中相對雷達平均視線角和視線角變化曲線
圖7 極化相關特性分析時間段劃分
1)僅考慮目標平動時的寬帶相關特性變化情況
不考慮空間進動目標的微動特性,分析目標平動對極化去相關效應的作用。即設定進動角φm=0°,進動頻率fm=0 Hz,仿真生成雷達目標動態全極化寬帶回波,計算4類目標在4個時間段內的寬帶極化相關系數均值隨相關時間的變化值,圖8對應為相關時間τ變化范圍0~0.1 s,步進間隔0.01 s時的變化曲線。
圖8 相關時間0~0.1 s內寬帶極化相關系數變化曲線(無進動)
根據圖8,空間進動目標的質心平動對寬帶極化特性調制很弱。當相關時間為0.1 s時,4類目標在T1~T4時間段內的寬帶極化相關系數大于0.8,其中T1時間段內的相關系數大于0.985,T2時間段內的相關系數大于0.95,T4時間段內的相關系數大于0.985,這表明空間進動目標的質心平動對其極化散射特性作用較弱。
2)考慮目標進動后的寬帶極化相關特性變化情況
這里調制目標進動參數,進動角和進動頻率設定為φm=12°、進動頻率fm=2 Hz,仿真目標的動態全極化寬帶雷達回波。如圖9(a)~(d)分別為T1~T4時間段內4類目標相關時間τ變化范圍0~0.1 s,步進間隔0.01 s時的變化曲線。
由圖9(a)~(d)對比圖8可見,目標的寬帶極化去相關效應主要由進動引起;其次,極化快起伏目標(WYDT、YYDT)的寬帶極化去相關效應較極化慢起伏目標(YZ、ZQWFX)嚴重。例如,當相關時間τ=0.02 s時,T3時間內有翼彈頭的寬帶極化相關系數即已下降到0.5,當相關時間增加到0.03 s時,T3時間內有翼彈頭的寬帶極化相關系數進一步降低,T1時間段內無翼彈頭、有翼彈頭相關系數即下降到0.55左右,T2時間段內無翼彈頭相關系數小于0.6。然而,在τ≤0.1 s內,4個時間段內圓錐、錐球無縫隙的相關系數均在0.7以上。
3)寬帶極化特性測量時分時極化測量雷達PRI選擇
寬帶極化散射相關系數反映了不同測量條件下寬帶極化散射相關特性,若相關系數較低,可認為兩個時刻的極化散射矩陣不相關。相應地,若分時測量所得的兩個相鄰PRI內的極化相關系數較低,則測量誤差較大。依然以0.8為界,當相關系數大于0.8時,判定兩個寬帶散射序列相關,分時極化測量得到的寬帶散射序列可用,否則為不相關。則對于上一節圖9所示的測量結果,當PRI≤0.01 s時,對于極化慢起伏目標和快起伏目標,分時極化測量能夠測得正確的極化散射矩陣。
進一步地,圖10給出更大相關時間區間內(τ=0~1 s)寬帶極化相關系數變化曲線。根據圖10,當相關時間τ≥0.1 s時,T1,T2和T4時間內的極化慢起伏目標圓錐的寬帶極化相關系數均下降到0.7以下,此時分時極化測量無法得到正確的極化散射矩陣。
圖9 相關時間0~0.1s內寬帶極化相關系數變化曲線(包含進動)
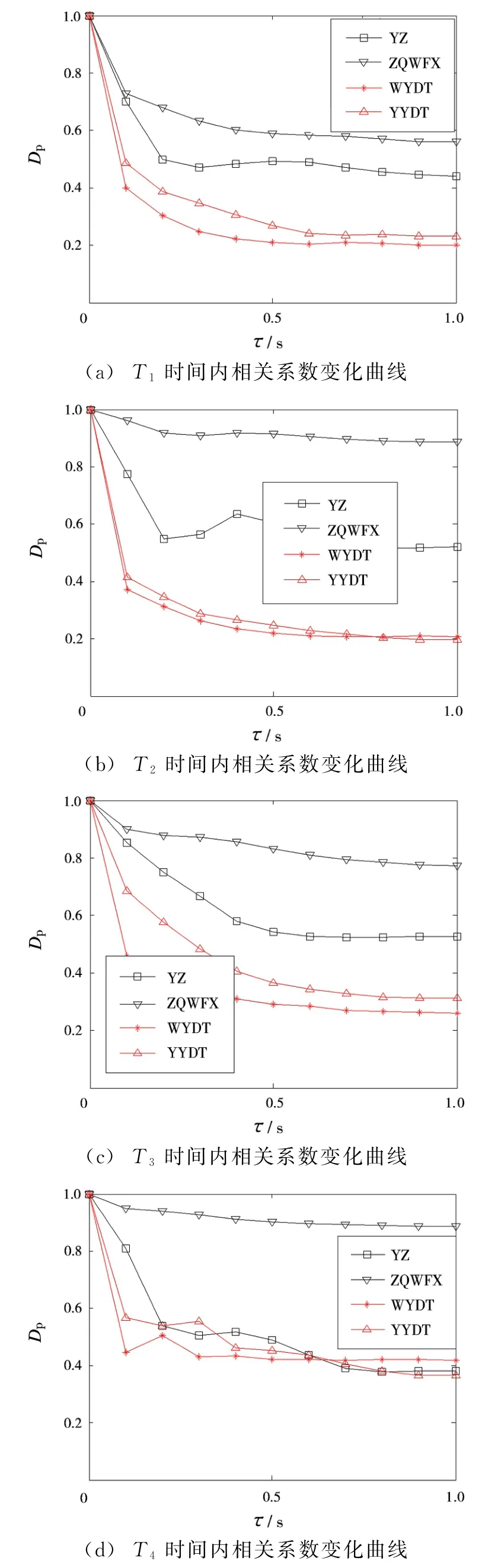
圖10 相關時間0~1 s內寬帶極化相關系數變化曲線(包含進動)
4 結束語
本文針對空間進動目標的極化相關特性,首先給出了其定義及其物理意義,表明其對分時極化測量雷達數據率設置具有參考價值;結合一種基于暗室測量數據插值方法的空間進動目標動態全極化雷達回波仿真流程,得到了典型戰情下的空間進動目標動態全極化寬帶雷達回波,然后以彈頭目標為例分析了空間進動目標的寬帶極化相關特性,進而分析了分時極化測量條件下空間進動目標測量的雷達PRI選擇問題。
研究表明,空間進動目標的極化去相關效應主要由目標的微運動引起;極化快起伏目標的去極化特性較極化慢起伏對姿態角的變化更劇烈。在本文設定的參數條件下,對于分時極化測量條件下的寬帶極化散射特性測量,PRI為0.01 s可滿足測量需要,但實際觀測場景較仿真場景更為惡劣,影響因素更多,因此需要更小的PRI。以上結論對于空間進動目標極化特性描述及空間進動目標探測時分時極化測量雷達的數據率設定具有一定參考意義。
[1]劉勇.動態目標極化特性測量與極化雷達抗干擾新方法研究[D].長沙:國防科技大學,2011.
[2]程旭,李永禎,王雪松.彈道目標極化相關性分析[J].雷達科學與技術,2013,11(2):159-164.CHENG Xu,LI Yong-zhen,WANG Xue-song.Research on Polarization Correlation Characteristics of Ballistic Target[J].Radar Science and Technology,2013,11(2):159-164.(in Chinese)
[3]SANTALLA V,ANTAR Y M M,PINO A G.Polarimetric Radar Covariance Matrix Algorithms and Applications to Meteorological Radar Data[J].IEEE Trans on Geoscience and Remote Sensing,1999,37(2):1128-1137.
[4]WANG Tao,WANG Xue-song,CHANG Yu-liang,et al.Estimation of Precession Parameters and Generation of ISAR Images of Ballistic Missile Targets[J].IEEE Trans on Aerospace and Electronic Systems,2010,46(4):1983-1995.
[5]張居鳳,馮德軍,王雪松,等.雷達目標動態RCS仿真研究[J].系統仿真學報,2005,17(4):834-837.
[6]施龍飛,李盾,王雪松,等.彈道導彈動態全極化一維像仿真研究[J].宇航學報,2005,26(3):344-348,372.
[7]馬梁,李永禎,陳志杰,等.空間微動目標動態全極化回波仿真技術研究[J].系統仿真學報,2012,24(3):628-631,637.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00