地形測量內業編繪系統的設計
2015-02-22 17:47:58徐超陳銀珠
地球 2015年11期
■徐超 陳銀珠
(浙江省測繪大隊 浙江杭州 310030)
地形測量內業編繪系統的設計
■徐超 陳銀珠
(浙江省測繪大隊 浙江杭州 310030)
利用三維點云數據繪制地形圖是點云數據處理技術的新領域應用,改變了傳統測繪領域的工作方式。本文利用PCL設計了地形測量內業編繪系統,加快內業編繪地形圖工作速度,是新測繪技術應用的嘗試。
點云PCL測量
1 前言
目前,外業測量工作主要采用傳統的作業方式,數據采集工作主要依靠全站儀和GPS進行稀疏目標點的高精度測量,外業作業人員需要對采集的空間坐標數據進行編輯處理出圖,工作量較大,工作時間較長。三維激光測量技術的出現和發展為空間三維信息的獲取提供了全新的技術手段,為信息數字化發展提供了必要的條件。三維激光掃描技術實現物體的空間位置高精度三維坐標數據快速采集,具有掃描速度快、實時性強、精度高、主動性強、全數字特征等特點,極大地降低成本,節約時間,適合作為外業采集的新型作業工具,替代傳統的全站儀和GPS[1]。
本文介紹以PCL(Point Cloud Library)為系統實現的基礎類庫,設計用于地形測量內業編繪處理的立體三維點云工廠平臺信息系統,該系統用于協助測繪人員快速制圖,且以三維場景視角展現測場的地物地貌,給人以身臨其境的視覺效果,也為構建城市三維場景模型提供了數據。
2 系統總體設計
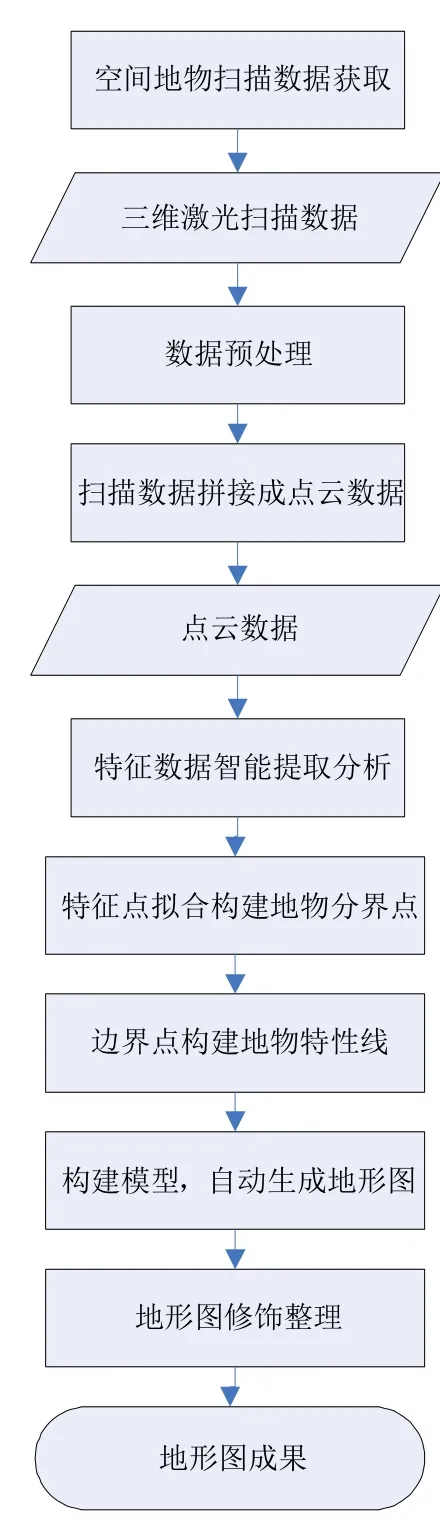
圖1 地形測量內業編繪系統的業務流程
2.1 PCL介紹
PCL(Point Cloud Library)是一個獨立的大型的處理二維/三維圖像和點云數據的開源工程,PCL包含了許多先進算法,比如濾波,特征估計,表面重建,模型擬合和分割等[2]。PCL是在吸收了前人點云相關研究基礎上建立起來的大型跨平臺開源C++編程庫,它實現了大量點云相關的通用算法和高效數據結構,涉及到點云獲取、濾波、分割、配準、檢索、特征提取、識別、追蹤、曲面重建、可視化等。支持多種操作系統平臺,可在Windows、Linux、Android、Mac OS X、部分嵌入式實時系統上運行。
PCL潛在的應用領域廣泛,目前得到應用的領域包括機器人智能感知領域,CAD/CAM逆向工程領域,激光遙感測量領域,虛擬現實及人機交互領域。
2.2 系統總體設計
地形測量內業編繪系統是PCL類庫為基礎,實現對三維激光掃描儀采集的點云數據處理和立體顯示,通過人機交互方式,采集有效的點快速繪制二維平面地形圖,并存儲到共享數據庫中,支持遠程點云數據獲取和展示。
該系統設計為具備點云數據特性提取,快速自動繪制地形圖,影像匹配三維建模,網絡共享操作處理等功能的點云數據測繪行業應用型系統,是國內三維激光掃描數據軟件處理方面創新型應用產品。對激光掃描儀采集的多站掃描數據進行拼接成點云數據,實現對點云數據的預處理和特性點提取。對提取的地物特性點連接構線,最終形成高精度的地形圖。
2.3 系統詳細流程說明
2.3.1 三維激光掃描儀數據處理
利用三維激光掃描儀獲取的點云數據構建實體三維幾何模型時,對于不同的應用對象、不同點云數據的特性,三維激光掃描數據處理的過程和方法也不盡相同。
整個數據處理過程可以概括為:數據采集、數據預處理、幾何模型重建和模型可視化。
數據采集是模型重建的前提,數據預處理為模型重建提供可靠精選的點云數據,降低模型重建的復雜度,提高模型重構的精確度和速度,主要內容有點云數據的濾波、點云數據的平滑、點云數據的縮減、點云數據的分割、不同站點掃描數據的配準及融合等;模型重建階段涉及的內容包括三維模型的重建、模型重建后的平滑、殘缺數據的處理、模型簡化和紋理映射等。
2.3.2 地物特征點的提取
地物特征點提取模型的建立,對于后期點云數據的三維模型建立和地形圖生成功能具有決定性作用。提取地物特性點需要首先做數據過濾、數據分割、采樣、去除離散點等數據預處理操作,然后利用數據擬合模型實現對點云數據特性點的提取。
2.3.3 等高線自動構建
等高線是地形圖承載的重要內容,建立有效的等高線自動構建模型是本系統所要研究的重要內容。等高線的建立需要將特征點上的高程值進行有效提取。根據點云數據構建地表模型和提取的特征點,自動提取特征點上的高程值。這里涉及到地表模型TIN和內插算法模型。系統可以疊加DLG和DOM對等高線進行編輯,人機判別提高等高線提取準確度和精度。
3 系統功能設計
3.1 系統功能結構設計
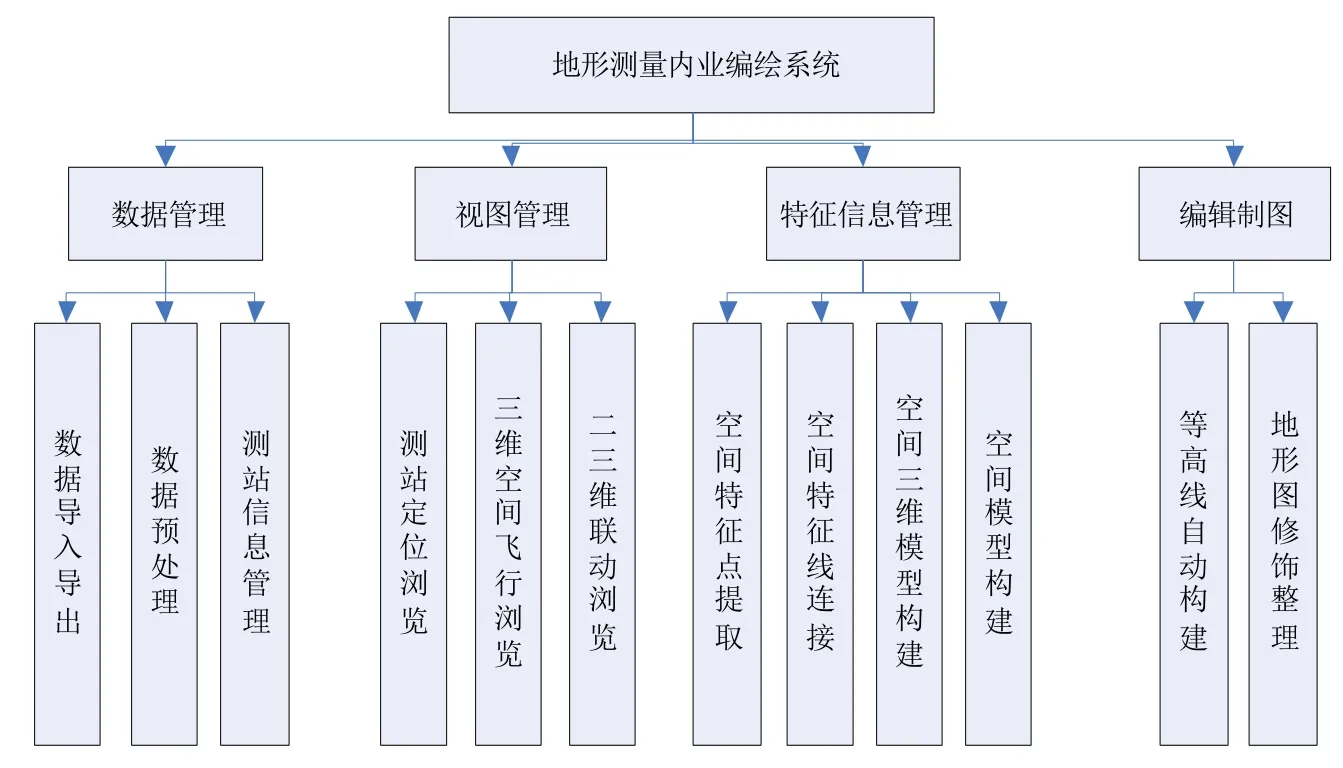
圖2 地形測量內業編繪系統的功能結構圖
地形測量內業編繪系統基于PCL(Point Cloud Library)和.NET技術進行研發,系統結構為C/S結構,數據庫采用Oracle 11g存儲點云數據文件,從而實現了多人同時在線調用、更新數據庫,并且可以實時地查看其他人對數據庫的更新內容。
3.2 功能模塊介紹
(1)點云數據管理子系統通過PCL類庫的數據管理接口,實現掃描數據的導入導出功能與測站信息的管理和維護功能。
(2)點云數據視圖管理子系統利用PCL類庫實現對點云數據三維渲染顯示、三維點編輯處理和交互瀏覽等功能;利用ArcEngine二次開發包實現將提取的三維點轉換為二維點顯示功能,以及二三維圖形的互動顯示功能,方便空間地物的定位和定向。
(3)點云特性信息管理子系統是利用PCL類庫接口實現對三維點云數據的過濾篩選,特性點信息提取,三維模型的構建和渲染處理,處理針對點云數據到三維模型構建實現表面重建技術。
(4)點云編輯制圖子系統是針對測繪行業需求實現的業務功能子系統,通過研發特定算法的功能模型,結合PCL類庫接口,開發等高線構建功能模塊,地形圖快速構建和地形圖修飾整理等功能模塊。
4 總結
通過點云數據編繪地形圖是三維點云工廠應用的新領域,對于測繪領域也是新的技術嘗試,目前還沒有成熟的方案可以直接借鑒。本文利用PCL開源類庫,設計了由激光掃描儀采集的點云數據編繪地形圖的新型繪圖系統,將給傳統測繪領域帶來新的技術思考和繪圖工作方式的改變,具有長遠的意義。
[1]徐曉雄,劉松林,李白.三維激光掃描測量技術及其在測繪領域的應用 [J].中國測繪. 2009,(2),62-65.
[2]朱德海,郭浩,蘇偉.點云庫PCL學習教程 (M).北京航空航天出版,2012.
The Design of Terrain Survey Editing System
Xu Chao,Chen Yinzhu
(Suveying and Mapping Team of Zhejiang Province, Hangzhou,Zhejiang,310030)
Using three-dimensional point cloud data plotted topographic map is new areas of application of point cloud data processing technology.And it is changing the traditional way of surveying and mapping work in the field.In this paper,the design of the topographic survey PCL compilation system within the indoor to speed up speed for compilation topographic maps,is the new mapping technology applications attempt.
point cloud,PCL,surveying
P2[文獻碼]B
1000-405X(2015)-11-243-2
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00