基于截斷總體最小二乘算法的車載三軸磁力儀標定
2015-02-23 05:25:16張瀅楊任農李明陽左家亮陳星伊
兵工學報 2015年3期
關鍵詞:方法
張瀅,楊任農,李明陽,左家亮,陳星伊
(1.空軍工程大學 航空航天工程學院,陜西 西安710051;2.西安衛星測控中心,陜西 西安710043)
0 引言
三軸磁力儀是一種低成本的導航定向傳感器[1]。它通常與其他傳感器組合以獲得捷聯載體的航向估計[2-3]。以陸用車輛導航為例,捷聯三軸磁力儀通過測量地磁場矢量在體坐標系的投影,然后借助其他姿態傳感器如慣性測量單元(IMU)提供的傾角信息將之轉換到當地水平坐標系下,計算出車體與磁北方向的夾角,最后利用當地磁偏角對其進行修正以得到車輛與地理北的夾角,即航向角。但是,磁力儀的輸出經常受到干擾磁場的影響。這些磁場會嚴重降低航向估計的精度。因此,在使用磁力儀之前,需要對其進行標定。
目前,已經有許多方法相繼被提出用于解決三軸磁力儀的標定問題。文獻[4 -5]提出兩步法并給出了閉合解。該方法通過定義中間變量,將磁力儀的非線性觀測方程轉換為線性方程形式AX =b,其中系統矩陣A 和數據矩陣b 都由磁力儀測量數據構成,而X 是未知的中間變量。方程的解可以采用標準的線性最小二乘方法進行估計。文獻[3,6 -8]采用橢球擬合的思想對磁力儀進行標定,其算法核心是采用最小二乘或自適應最小二乘方法。文獻[9]針對磁力儀的觀測方程等式兩邊同時含有噪聲的情況,提出了基于總體最小二乘(TLS)算法的磁力儀標定方法。
注意到現有的磁力儀標定方法要求傳感器能夠在不同方向上進行旋轉以獲得盡可能多的方向的測量值。但是在車載磁導航應用中,車體受到路面的約束而不能實現空間全方向的轉動,與之固連的磁力儀將難以獲取全方向的磁場信息。因此,上述用于標定磁力儀標定的線性觀測方程將面臨病態問題。如果沒有對應的方法對病態問題進行適當地處理,那么傳統的標定方法將產生不可靠的解,甚至無解。為了獲得魯棒的解,通常需要引入正則化方法。傳統的正則化方法如Tikhonov 正則化[10]假設線性觀測方程的右邊部分受到噪聲干擾,而左邊部分則是精確的。但是在磁力儀標定問題中,系統矩陣A和數據矢量b 都同時被測量噪聲所干擾。因此,在選擇正則化方法時,選擇一種能夠同時處理等式兩邊誤差的方法更為合適。本文采用截斷總體最小二乘(TTLS)方法對車載磁力儀進行標定。TTLS 方法適合處理強病態情況下的線性最小二乘求解問題[11]。車載磁導航實驗結果表明,TTLS 方法能夠有效地抑制磁力儀標定中的病態問題,獲得良好的標定效果。
1 磁導航原理
車載磁導航系統主要由三軸磁力儀和IMU 組成。由于車體并不總是在水平面上行駛,使得磁力儀很難保持水平狀態,為此在解算航向角時需要進行傾角補償。傾角信息主要由IMU 經過慣性解算實時提供。由于磁力儀與車體捷聯,其輸出值為地磁場在體坐標系下的投影。為了確定航向角,這些投影值需要轉換到當地水平坐標系下,其轉換公式[1]為
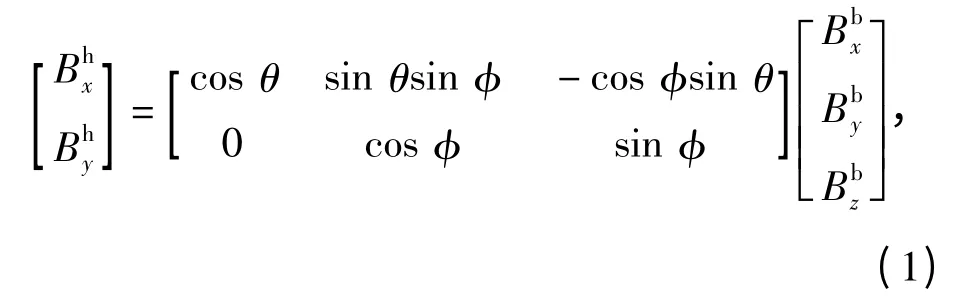

對ψmag進行當地磁偏角δ 的修正,即可得到車體與地理北之間的夾角,此即為航向角。δ 值可通過查詢全球磁場模型得到[12]。
2 傳感器誤差模型
地磁場的測量誤差來源于傳感器自身的誤差(非正交誤差、刻度因子誤差和零偏誤差)和載體磁場干擾(硬磁誤差和軟磁誤差)。在數學上,這兩類誤差統一建模為總非正交誤差、總刻度因子誤差和總零偏誤差[3-4,8,13-14]。磁力儀的輸入輸出過程[4]可描述為
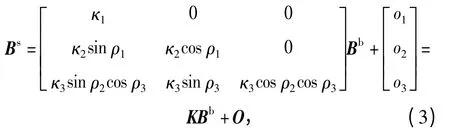
式中:Bs是地磁場矢量在傳感器坐標系下的投影;Bb是地磁場矢量在體坐標系下的投影;ρ1、ρ2、ρ3是總非正交誤差角;κ1、κ2、κ3是總刻度因子誤差;o1、o2、o3是總零偏誤差。
如文獻[4]所示,總非正交誤差角來源于磁力儀的制造工藝誤差、磁力儀安裝誤差以及軟磁誤差;總刻度因子誤差則來源于傳感器刻度因子誤差和軟磁誤差;總零偏誤差由傳感器零偏誤差和硬磁誤差組成。三軸磁力儀的標定模型可對(3)式進行逆向映射得到,即

假設捷聯三軸磁力儀在一個固定磁場的區域旋轉,那么磁力儀標定后的輸出將約束分布在以當地地磁場幅值為半徑的圓球表面上,即有

式中:R 是當地地磁參考場的幅值。將(4)式和(5)式展開可得

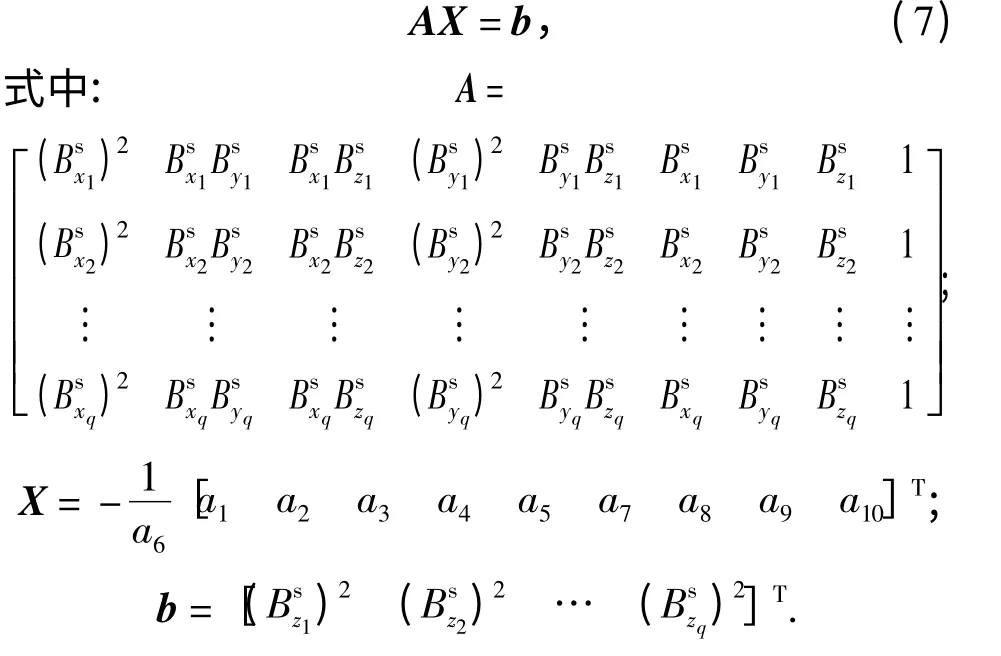
注意到數據矢量b 的構成可以從觀測方程中任意選取。地磁場測量個數q 遠大于觀測方程中的未知量個數,因此(7)式是一個超定線性方程組。一旦方程組求解出未知量,即可從中解算出標定參數的估計值和
3 總體最小二乘標定方法
在磁力儀標定中,系統矩陣A 和數據矩陣b 都受到測量噪聲的干擾,導致(7)式可能是不相容的。在此情況下,線性最小二乘解不再是最優的。文獻[9]采用TLS 算法來處理系統矩陣A 和數據矩陣b 都存在誤差的情況。TLS 通過最小化以下指標得到問題的解:

式中:‖*‖F是Frobenius 模和分別是包含誤差量的A 和b. (8)式的求解可以參考文獻[15]。首先,對擴展矩陣(A,b)進行奇異值分解,得

式中:n 是X 的維數;σi是第i 個奇異值,并且有σ1≥σ2≥…≥σn+1;ui是矩陣U 的第i 列矢量,U∈?m×m,UTU = Im;vi是矩陣V 的第i 列矢量,V∈?(n+1)×(n+1),VTV = In+1;Σ = diag(σ1,…,σn+1)。如果矩陣A 是滿列秩的,那么(8)式可得到閉合解[16]為

式中:σn+1是擴展矩陣(A,b)的最小奇異值。從統計的角度看,σ2n+1In×n是誤差協方差的估計矩陣。與最小二乘方法相比,TLS 方法從協方差矩陣ATA中移去測量誤差使之能夠獲得更高精度的解,其付出的代價是TLS 的解過程,是降正則化的。
4 截斷總體最小二乘標定方法
在車載磁力儀標定中,車體的機動受到限制。車體一般繞天向軸進行順時針或逆時針的旋轉獲得用于標定磁力儀的地磁測量數據。當車體在水平面內時,由于垂直方向上的地磁測量誤差無法被充分激勵,這些測量數據只能滿足二維磁力儀(兩個正交敏感軸固定在水平面內)的標定,無法滿足三維軸磁力儀的標定[6]。由這些測量數據組成的磁觀測方程,將會導致系統矩陣A 的條件數很大,即觀測方程是病態的。如果不針對該問題進行適當地處理,那么車載磁力儀標定問題將可能得到不可靠的解,甚至是無解。為了求得穩定的解,需要引入正則化方法。
在選擇正則化方法的時候,所選算法應具備處理等式兩邊的誤差能力。TTLS 方法是基于TLS 方法發展而來的,它適用于嚴重病態的、方程等式兩邊都存在誤差的線性求解問題。該方法的基本思想是通過截斷小的奇異值對應的解的部分,使得解更為穩定,其算法流程總結[11]如下:
1)計算(A,b)的奇異值分解;
2)選擇適當的正則化參數k(k≤n);
3)對矩陣V 進行分塊,
4)TTLS 的解可通過下式得到:

式中:(Ak,bk)是(A,b)的秩k 最佳逼近;到是(A,b)的對應的奇異值;代表對解的平滑度約束;代表對數據的擬合度。隨著參數k 的增加,相繼增加相繼減小。為此k 的取值應該是上述兩個模值平衡的結果。近些年,許多選擇正則化參數的方法相繼被提出,但是每一種方法都不能夠適用于所有的病態問題,因為正則化參數的最佳選擇是依據所解決的問題而定的。
本文選擇L 曲線法[18]作為正則化參數確定的方法。L 曲線準則是以為橫坐標,以為縱坐標,可得到許多點,這些點通過擬合得到一條形狀如字母“L”的曲線。曲線的拐點能夠較好地平衡上述兩方面的信息并且同時保持它們的取值較小。因此,拐點所對應的正則化參數即為L 曲線法的最優值。
5 實驗與結果
為驗證TTLS 標定方法的有效性,將車載磁導航系統安裝在面包車體內進行測試。為準確估計磁導航的精度,車體內部獨立安裝了慣性導航系統/全球定位系統(INS/GPS)組合導航系統,可提供最大精度誤差為0.1°的航向角作為參考。
選擇一塊地磁場恒定的區域作為標定區,測得真實磁場值作為參考;然后讓車在該區域內旋轉,旋轉過程中盡量地改變俯仰角。車載三軸磁力儀測得旋轉過程中的地磁場數據,用于對磁力儀的標定。通過計算可知系統矩陣A 的條件數為1.36 ×1010,表明該線性觀測方程是嚴重病態的[19]。TLS 標定方法由文獻[9]提出,其標定效果要好于橢球擬合法,因此本文采用TLS 法與TTLS 法進行對比。利用TLS 和TTLS 標定算法處理測量數據,可得到磁力儀的標定參數如表1 所示。
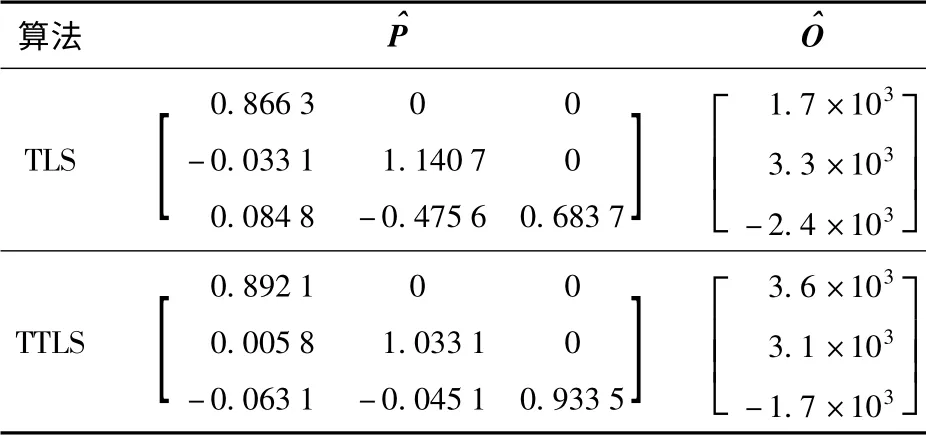
表1 參數估計結果Tab.1 Parameter estimates
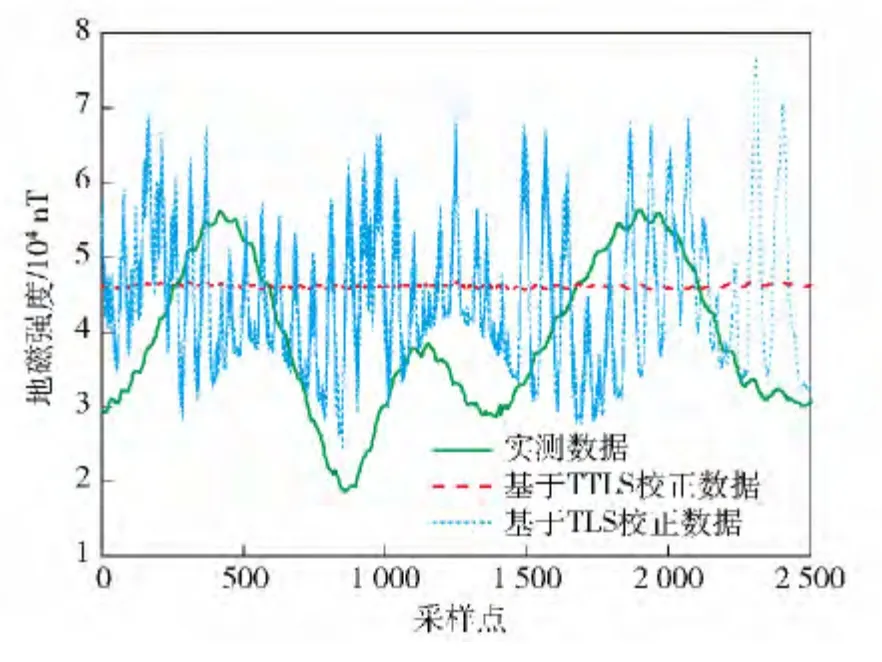
圖1 TLS 和TTLS 標定結果對比Fig.1 TLS versus TTLS calibrated total magnetic field
圖1是TLS 和TTLS 標定結果對比。圖中實線為車載三軸磁力儀測得的實時數據,由于儀器以及載體干擾磁場的影響,未標定的地磁曲線偏離真實磁場值(46 100 nT)較大,其峰峰值差異約20 000 nT. 點線為TLS 法的標定結果,因為系統病態,由TLS 標定后的測量曲線已經遠遠偏離了真實值,并沒有起到標定的效果,這表明TLS 法無法應用于病態情況下的三軸磁力儀標定。虛線為TTLS 方法標定結果,其標定后的測量值則接近地磁場值。令表示標定后的地磁場測量值,r0表示真實磁場值,那么標定后的相對均方根誤差rmse 可由下式計算得到:

式中:N 表示地磁場測量個數。經計算可知由TTLS標定后的磁場值均方根誤差小于1%. 實驗結果表明TTLS 標定方法能夠準確地估計磁場誤差并進行有效地補償,表明正則化技術是標定方法在病態問題中獲得魯棒解的關鍵性因素。
由于TLS 方法無法應用于病態條件下的三軸磁力儀校正,也無法進行航向角的估計,因此在航向角比較實驗中,本文采用橢圓擬合法[20]與TTLS 標定法來比較結果。圖2 是磁力儀經過標定后的車載磁航行實驗。圖中的航向角參考曲線由車載INS/GPS 組合導航系統提供。從圖中可以看出:當車輛在水平行駛時,兩種標定方法標定磁力儀并解算的航向角曲線都能夠接近航向參考曲線;當車輛在轉彎爬坡時,橢圓擬合法航向角誤差遠比TTLS 標定法航向角誤差大。這是因為橢圓擬合法僅對水平面的二維磁力儀進行了標定,并沒有考慮天向軸傳感器的測量誤差。由于車輛在轉彎爬坡時導致天向軸磁力儀在水平投影中所占的比例增大,使得橢圓擬合法航向角解算誤差增大。TTLS 標定法考慮了磁力儀天向軸分量數據的影響,并有效地抑制了病態性問題,從而提高了磁航向估計精度。
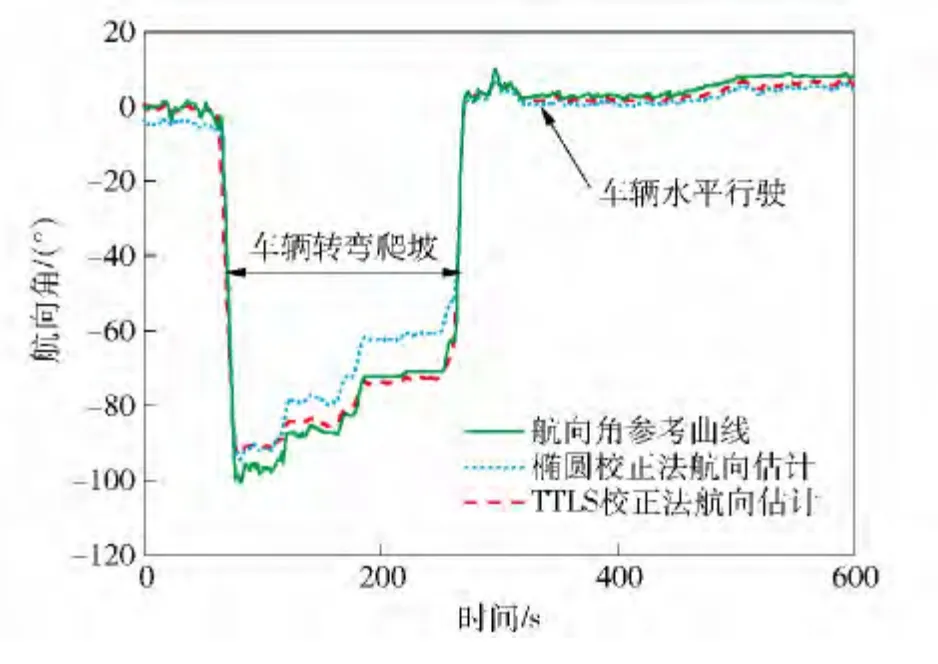
圖2 橢圓擬合與TTLS 標定法航向角估計對比Fig.2 Comparison of heading estimates for TTLS and ellipse-fit algorithms
圖3是兩種校正算法的航向誤差曲線對比。其中,實線為TTLS 校正法航向誤差曲線,其平均航向角誤差約為1.5°,可滿足車載磁導航的精度需求[1,5-6,8]。虛線為橢圓校正法航向誤差曲線,其平均航向誤差約為4.5°. 通過對比可看出TTLS 校正法的優越性。
6 結論
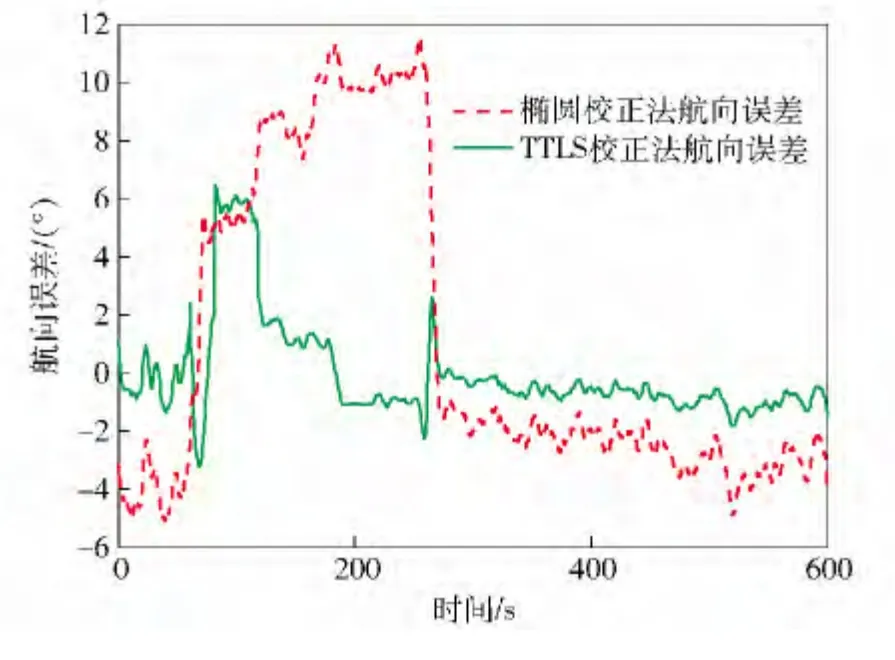
圖3 航向誤差曲線對比Fig.3 Comparison of heading error curves
磁力儀的標定是影響車載磁導航精度的關鍵技術。由于車輛機動能力受限,三軸磁力儀標定問題中的觀測方程將嚴重病態,早先提出的三軸磁力儀標定方法如TLS 標定法有可能不再適用,因此正則化技術是必不可少的。本文提出TTLS 技術解決病態情況下的磁力儀標定問題,能夠有效地抑制病態問題帶來的影響,獲得準確的參數估計。車載磁導航實驗結果表明該方法提高了航向角估計精度和魯棒性。
References)
[1]Caruso M J. Applications of magnetic sensors for low cost compass systems[C]∥IEEE 2000 Position Location and Navigation Symposium. San Diego,CA:IEEE,2000:177 -184.
[2]Siddharth S,Ali A S,El-Sheimy N,et al. A game-theoretic approach for calibration of low-cost magnetometers under noise uncertainty[J]. Measurement Science and Technology,2012,23(2):025003.
[3]Fang J C,Sun H W,Cao J J,et al. A novel calibration method of magnetic compass based on ellipsoid fitting[J]. IEEE Transactions on Instrumentation and Measurement,2011,60(6):2053 -2061.
[4]Foster C C,Elkaim G H. Extension of a non-linear,two-step calibration methodology to include non-orthogonal sensor axes[J].IEEE Transactions on Aerospace Electronic Systems,2008,44(3):1070 -1087.
[5]Gebre-Egziabher D,Elkaim G H,Powell J D,et al. A non-linear,two-step estimation algorithm for calibrating solid-state strap down magnetometers[C]∥8th International Conference on Navigation Systems. St. Petersburg,Russia:IEEE/AIAA,2001:290 -297.
[6]徐玉,任沁源,孫文達,等. 微小型無人直升機地磁導航算法研究[J]. 兵工學報,2011,32(3):337 -342.XU Yu,REN Qin-yuan,SUN Wen-da,et al. A geomagnetic navigation algorithm for miniature unmanned helicopter[J]. Acta Armamentarii,2011,32(3):337 -342. (in Chinese)
[7]黃學功,王炅. 地磁信號檢測系統誤差分析與補償方法研究[J]. 兵工學報,2011,32(1):33 -36.HUANG Xue-gong,WANG Jiong. Error analysis and compensation methods for geomagnetic signal detection system[J]. Acta Armamentarii,2011,32(1):33 -36. (in Chinese)
[8]Renaudin V,Afzal M H,Lachapelle G. Complete triaxis magnetometer calibration in the magnetic domain[J]. Journal of Sensors,2010,2010:1 -9.
[9]吳志添,武元新,胡小平,等. 基于總體最小二乘的捷聯三軸磁力儀標定與地磁場測量誤差補償[J]. 兵工學報,2012,33(10):1202 -1209.WU Zhi-tian,WU Yuan-xin,HU Xiao-ping,et al. Calibration of strapdown three-axis magnetometer and measurement error compensation of geomagnetic field based on total least squares[J]. Acta Armamentarii,2012,33(10):1202 -1209.(in Chinese)
[10]Honerkamp J,Weese J. Tikhonovs regularization method for illposed problems[J]. Continuum Mechanics and Thermodynamics,1990,2(1):17 -30.
[11]Fierro R D,Golub G H,Hansen P C,et al. Regularization by truncated total least squares[J]. SIAM Journal on Scientific Computing,1997,18(4):1223 -1241.
[12]Mclean S,Macmillan S. The US/UK world magnetic model for 2005—2010[R]. Nottingham,UK:British Geological Survey,2004.
[13]Bonnet S,Bassompierre C,Godin C,et al. Calibration methods for inertial and magnetic sensors[J]. Sensors and Actuators A:Physical,2009,156(2):302 -311.
[14]Wu Z T,Wu Y X,Hu X P,et al. Calibration of three-axis strapdown magnetometers using particle swarm optimiazation algorithm[C]∥IEEE International Symposium on Robotic and Sensors Environments. Montreal,Canada:IEEE,2011:160 -165.
[15]Golub G H,Van Loan C F. An analysis of the total least squares problem[J]. SIAM Journal on Numerical Analysis,1980,17(6):883 -893.
[16]Markovsky I,Van Huffel S. Overview of total least-squares methods[J]. Signal Processing,2007,87(10):2283 -2302.
[17]Sima D M,Van Huffel S. Level choice in truncated total least squares[J]. Computational Statistics & Data Analysis,2007,52(2):1103 -1118.
[18]Hansen P C,O'Leary D P. The use of the L-curve in the regularization of discrete ill-posed problems[J]. SIAM Journal on Scientific Computing,1993,14(6):1487 -1803.
[19]陳希孺,王松桂. 近代回歸分析[M]. 合肥:安徽教育出版社,1987.CHEN Xi-ru,WANG Song-gui. Advanced in regression analysis[M]. Hefei:Anhui Education Press,1987. (in Chinese)
[20]張曉明,趙剡. 基于橢圓約束的新型載體磁場標定及補償技術[J]. 儀器儀表學報,2009,30(11):2438 -2443.ZHANG Xiao-ming,ZHAO Yan. New auto-calibration and compensation method for vehicle magnetic field based on ellipse restriction[J]. Chinese Journal of Scientific Instrument,2009,30(11):2438 -2443. (in Chinese)
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56