基于多閾值與像素點追蹤的軌道識別
2015-02-27 05:59:36張兆陽陳琦瑋汪一鳴
電子設計工程 2015年23期
強 祥,張兆陽,陳琦瑋,吳 澄,汪一鳴
(1.蘇州大學 城市軌道交通學院,江蘇 蘇州215000;2.蘇州大學 電子信息學院,江蘇 蘇州215000)
基于多閾值與像素點追蹤的軌道識別
強 祥1,張兆陽2,陳琦瑋2,吳 澄1,汪一鳴1
(1.蘇州大學 城市軌道交通學院,江蘇 蘇州215000;2.蘇州大學 電子信息學院,江蘇 蘇州215000)
為了保證有軌電車營運系統的安全性和可靠性,快速檢測有軌電車軌道之間及其周邊是否存在障礙物并迅速做出反應成為一個值得研究的課題,而軌道的識別是障礙物檢測的前提。結合有軌電車軌道的實際特征,提出基于多閾值與像素點追蹤的軌道識別算法,采用多閾值的方法進行軌道區域分割,利用像素點追蹤的方法進行軌道特征點的提取,選擇合適的曲線模型構建軌道方程,從而實現對有軌電車直道和彎道鐵軌的有效識別。
軌道識別;多閾值;像素點追蹤;連通區域
現代有軌電車具備較快的行駛速度、較大的客運量和開放的運營環境,當有軌電車行駛速度、障礙物大小達到一定程度時,就會對行車安全造成極大威脅。即使行車速度較慢、障礙物較小時,列車與障礙物的碰撞也會對車身部件造成不良影響。因此,工程上對有軌電車系統安全性和可靠性提出了較高要求。常規的有軌電車障礙物檢測主要依靠人工作業方式對路軌進行檢測和維護,在車輛行進過程中由司機完成前方障礙物探測,車載監控設備僅為人工識別提供輔助。近年來基于圖像視覺的智能處理方式,越來越多地被采用。它具備反應速度快、建設成本低和分類能力強等顯著特點[1]。但在有軌電車障礙物檢測中的運用尚不廣泛。
實際獲取的圖像往往包含大量無關信息,對整幅圖像的搜索會造成檢測效率和準確度的降低,而障礙物檢測真正感興趣的區域是軌道之間及其周邊區域。因此,軌道的準確提取顯得尤為重要。目前,單獨用于有軌電車或是高速鐵路軌道識別的方法并不多見,但是與之類似的車道線檢測的方法則較為成熟。現存的線狀目標的提取方法分為基于模型的方法和基于特征的方法。基于模型的方法是利用先驗知識對每一幀圖像進行模型匹配,提取軌道線[2];基于特征的方法是利用軌道目標的亮度、色彩、紋理等信息來標識軌道區域。早期的軌道區域提取的文章大多使用閾值法或是邊緣檢測直接提取,常用的迭代閾值法和Otsu法[3]對于區域明顯、背景簡單的場景效果理想,但是復雜背景下檢測效果較差[4]。邊緣檢測算子較多,通常采用Sobel和Canny邊緣檢測算子,這些算子對于復雜背景下的線形目標也難以準確提取,并且受經驗閾值影響,導致算法穩定性差[5]。基于Hough變換的軌道提取方法對噪聲和環境干擾有一定的抑制作用,對于直線上少數點的抖動,或是出現斷裂和虛線的情況,仍能保持良好效果,但是當干擾增大或是線形為彎道情況,仍然無能為力[6]。
有軌電車運行在城市內部及其周邊,與高速鐵路軌道檢測和公路車道線檢測相比,存在以下難度1)復雜多變的背景;2)彎道、上下坡路段眾多;3)高樓、電線桿、接觸網造成的陰影嚴重。因此,具有較強抗干擾性的軌道識別算法是研究的關鍵。
1 基于多閾值的軌道區域分割方法
有軌電車運行在城市內部及其周邊,軌道采用的是不同于高速鐵路的凹形軌,如圖1所示,從中觀察發現存在以下特點:
1)凹形軌槽內較暗,槽外較亮,灰度差異明顯;
2)較亮較暗部分直接相鄰。

圖1 有軌電車凹形軌道圖Fig.1 Concave tram tracks
圖2為凹形軌道的灰度截取圖,利用圖像處理軟件獲取較亮較暗部分灰度值,得到:
1)較亮部分灰度值集中在150左右,較暗部分灰度值集中在10左右;
2)較亮較暗部分臨界區域梯度較大。

圖2 凹形軌道截取圖Fig.2 The interception of concave track
根據以上特點,文中提出一種基于多閾值的軌道區域分割方法,閾值法是利用相似性分割出相同閾值條件的區域,多閾值指分別利用槽內較暗灰度值和槽外較亮灰度值對原圖進行兩次閾值分割,再根據距離特征進一步分割軌道區域,減少環境干擾。具體步驟如下:
1)對采集到的原始圖像進行預處理,主要包括灰度化和平滑濾波。
2)定義預處理后的灰度圖像為f(x,y),利用先驗知識確定槽內較暗區域灰度值TL和槽外較亮區域灰度值TH。由于受光線、攝像頭拍攝角度的影響,軌道槽內外灰度值在一定范圍內波動,槽內較暗區域二值化及槽外較亮區域二值化分別按公式(1)及公式(2)進行:
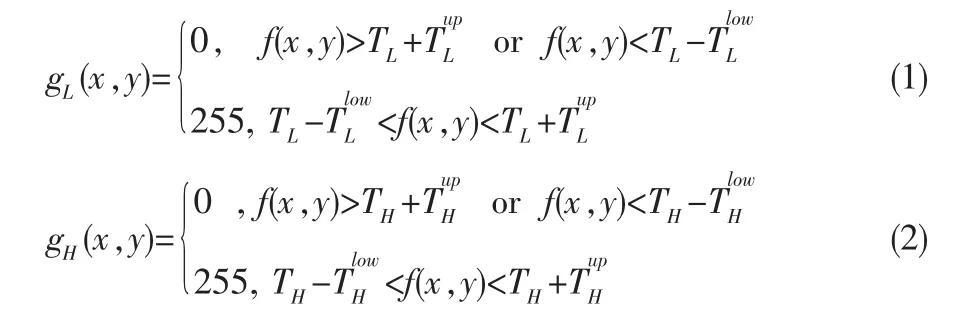
3)對較暗區域二值圖gL(x,y)和較亮區域二值圖gH(x,y)進行膨脹得到(x,y)和(x,y),形態學膨脹的目的是為了連接部分斷裂的軌道區域和擴大槽內外區域的寬度,為提取臨界區域做準備。膨脹結構元的寬度決定下一步gu(x,y)二值圖中軌道區域的寬度。
4)對膨脹后的兩幅二值圖求交集,如公式(3),得到干擾大量減少軌道區域較為完整的區域分割二值圖。

本方法與利用傳統閾值法或邊緣檢測得到的區域分割二值圖相比,在不影響軌道區域分割完整性的基礎上能夠減少背景干擾及環境噪聲。圖3為利用Canny邊緣檢測算子得到的軌道邊緣檢測二值圖,圖4為利用本文提出的基于多閾值的區域分割方法得到的軌道區域分割二值圖,圖4的背景干擾明顯少于圖3,更加利于下一步特征點的提取。

圖3 邊緣檢測二值圖Fig.3 Binary image for edge detection
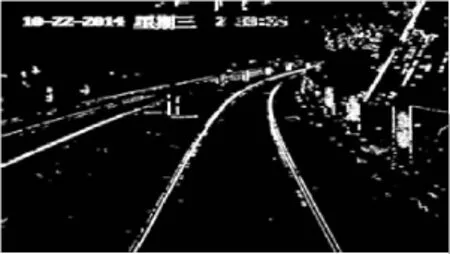
圖4 多閾值分割二值圖Fig.4 Binary image for multi-threshold segmentation
2 基于像素點追蹤的軌道特征點提取方法
基于像素點追蹤的軌道特征點提取方法指的是在邊緣檢測或閾值分割二值圖的基礎上,先根據某些嚴格的 “探測準則”找到屬于目標物體上可能的像素,再根據這些像素的某些特征用一定的“跟蹤準則”找到目標物體上的其它像素,最后利用一定的先驗知識對干擾線段進行剔除[7]。像素點追蹤的方法不受軌道走向、上下坡路段等情況的影響,更加符合有軌電車的實際運行情況,此處具有較強抗干擾性的探測準則和跟蹤準則的制定是本研究的關鍵。
本文提出的像素追蹤方法的探測準則是利用一定先驗知識搜索軌道的起始點,跟蹤準則是利用已經找到的點的位置及連通性結合骨架提取的思想找到軌道上的其它像素點,對提取出的多條軌跡線利用軌道線長度作為先驗知識進行干擾
線段的剔除,最后采用最小二乘分段二次擬合的方法構造軌道方程。具體流程如下:
1)在gu(x,y)上確定兩側軌道可能的起始點xLn,xRmn,m= 1,2,3…。定義左側軌道起始點搜索范圍[xLs,xLe],右側軌道起始點搜索范圍[xRx,xRe],搜索第Y行,Y始于圖像底部。在搜索范圍內尋找橫向連通區域的中點 xLn∈ {xLs,xLe}和 xRm∈{xRs,xRe},所有的點都被視為可能的起始點。若搜索范圍內無起始點,則搜索Y-1行,依次類推,若直至第Ymin行也未能找到起始點,則放棄本側軌道起始點的搜索;
2)跟蹤獲取軌道上的其它像素。利用跟蹤準則跟蹤每一個起始點都可以得到一條軌跡線,這里以xL1為例。設xL1所處的橫向連通區域為 [xL1s,xL1e],定義其為跟蹤搜索范圍的初始值,所處行數為yL1,將此區域延拓為[xL1s-Te,xL1e+Te]作為新一行yL1-1的搜索范圍,Te為左右延拓的像素點個數,搜索該區域內若干連通區域的中點xL11,xL12,…,xL1k,這些點都被視為跟蹤到的軌跡點。若區域內未能找到軌跡點,則搜索yL1-2行,依次類推,若連續Yrow行未能找到軌跡點,則放棄本條軌跡線的搜索。若在當前行跟蹤到了軌跡點,就要確定新一行的跟蹤搜索范圍。設yL1-1跟蹤到了軌跡點,則將xL11所處連通區域的左端點xL11s和xL1k所處連通區域的右端點xL1ke加以延拓作為新的跟蹤搜索范圍[xL11s-Te,xL1ke+Te],重復此前步驟進行新一行軌跡點的搜索,直至滿足限界要求;
3)干擾剔除,從多條軌跡線中選取軌道線。根據大量試驗驗證,軌道線為提取出的軌跡線中最長最完整的。因此,像素追蹤得到的xL1,xL2,…,xLn條軌跡線中像素點個數最多的作為左側軌道線,像素追蹤得到的xR1,xR2,…,xRm條軌跡線中像素點個數最多的作為右側軌道線;
4)離散點構造軌道方程。利用離散點構建曲線模型的方法很多,本文考慮算法復雜度及實時性要求,采用最小二乘分段二次擬合的方法構造軌道方程。對采集到的左右軌道特征點按搜索順序分段,每N個點利用最小二乘法進行二次擬合。對于軌道起始點和終止點未能滿足限界要求的情況,分別對開始的N個點和最后的N個點利用最小二乘法進行二次擬合并延長直至滿足限界要求,N的具體大小視實際情況而定。
本方法能夠準確預知軌道線路走向,不受上下坡、彎道等場景的影響,具有較強的抗干擾性,計算量較小,滿足實時性的要求。
3 試驗結果及分析
試驗以英特爾酷睿i7 3.4 GHz計算機為硬件,以vs2010和opencv2.4.4作為軟件開發工具按照上述步驟設計算法程序。試驗中所用視頻全部從蘇州高新區有軌電車一號線實地采集得到,圖像幀大小為1080*1920,文中給出了部分試驗結果。
本文第2節中的圖1為原始圖像幀,下面以圖1為例進行試驗分析。對圖1進行灰度化,高斯濾波得到預處理后的灰度圖,如圖5所示。

圖5 預處理后的灰度圖Fig.5 Gray image after preprocessing
對圖5利用第一節的方法進行閾值分割,圖6為根據式(1)得到的槽內較暗部分的二值圖gL(x,y),圖7為根據式(2)得到的槽外較亮部分的二值圖gH(x,y),圖6和圖7經過形態學膨脹后求交集的結果gu(x,y)即為第一節中的圖4。

圖6 槽內較暗部分二值圖Fig.6 Binary image for the dark area

圖7 槽外較亮部分二值圖Fig.7 Binary image for the bright area
對圖4利用第二節的方法進行軌道特征點提取及軌道模型的建立,圖8為利用軌道模型劃定的軌道之間的感興趣區域。
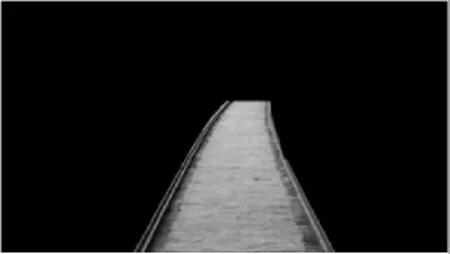
圖8 軌道之間ROI區域Fig.8 Region of interest between the track
由上述試驗結果可知,本文設計的基于多閾值及像素點采用240 MHz時鐘,512點排序,只需要8 μs。
5 結束語
排序在雷達信號處理過程中只是其中的一個功能,這要求我們邏輯資源不能消耗太多,而雷達的實時性要求又要求我們必須快速的完成排序。從上述論述可知,單純的串行和并行排序[6]都不能滿足要求,只有本文這種基于FPGA技術的串并行結合處理排序算法才能夠滿足實際工程要求,達到了實時排序的效果。 該算法具有通用性,可以應用到各種數據快速排序運算領域。
[1]吳順君,梅曉春.雷達信號處理和數據處理計數[M].北京:電子工業出版社,2004.
[2]周建欽.超快速排序算法[J].計算機工程與應用,2006,42 (29):41-42.
[3]王昌厚.無符號整數按位快速排序算法[J].計算機應用與軟件,2006,23(8):120-124.
[4]喝賓.Xinlinx FPGA設計權威指南[M].北京:清華大學出版社,2012.
[5]于斌,米秀杰.ModSim電子系統分析及仿真[M].北京:電子工業出版社,2011.
[6]師延偉,金長江.基于FPGA并行全比較排序算法[J].數字技術與應用,2013(10):126-127.
Tram railway recognition based on multi-threshold and pixel tracking
QIANG Xiang1,ZHANG Zhao-yang2,CHEN Qi-wei2,WU Cheng1,WANG Yi-ming1
(1.School of UrbanRailTranslation,Soochow University,Suzhou 215000,China;2.School of Electronic and Information Engineering,Soochow University,Suzhou 215000,China)
In order to ensure the safety and reliability of the tram operation system,A lot of work need to be done on fast detection of the possible obstacles as well as short time reaction with them.It is widely recognized that the railway recognition is the premise of obstacle detection.This paper brings forward an algorithm for railway recognition based on multi-threshold and pixel tracking,taking the practical characteristics of tram track into consideration.This algorithm segments the track area by applying multi-threshold method,extracts the track feature points adopting pixel tracking method,and selects the appropriate curve model to construct the track equation.This algorithm can effectively identify the straight and curved tracks.
railway recognition;multi-threshold;pixel tracking;connected region
TN911.73
:A
:1674-6236(2015)23-0149-03
2015-02-02稿件編號:201502011
江蘇省普通高校研究生科研創新項目(KYLX_1231);2014深圳市城市軌道交通重點實驗室開放基金項目(SZ2014001)
強 祥(1991—),男,江蘇揚州人,碩士研究生。研究方向:圖像處理、智能交通系統。
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44