基于恒星幾何構型分布的天文定位誤差建模及誤差特性分析
2015-02-28 10:46:16趙慧熊智王麗娜潘加亮郁豐戴怡潔
兵工學報 2015年5期
趙慧,熊智,王麗娜,潘加亮,郁豐,戴怡潔
(1. 南京航空航天大學 自動化學院,江蘇 南京210016;2. 北京航天自動控制研究所 宇航智能控制技術國家級重點實驗室,北京100854;3. 南京航空航天大學 航天學院,江蘇 南京210016)
0 引言
天文導航是以已知準確空間位置、不可毀滅的自然天體為基準,并通過光電和射電方式被動探測天體位置,經解算確定測量點所在載體的經度、緯度、航向和姿態等信息[1-2]。天文導航系統具有自主性強、可靠性高、精度好等優點,一直受到各軍事強國的重視[3],已經成為組合導航系統的重要組成部分,廣泛應用于艦艇、飛機、空間飛行器等領域[4]。
目前,對天文定位性能的研究多集中于提高天文敏感元件性能的研究[5-6]。為提高天文敏感器的測量性能,恒星星光的敏感器元件由CCD 向CMOS發展[7];為降低雜散光對天文敏感器性能的影響,敏感器遮光罩由單節型向優化的兩節型遮光罩發展[8];為降低敏感器畸變及色差,對敏感器鏡頭進行像方遠心化等結構優化并引入二元光學面[9]。
在天文定位選星過程對天文定位誤差特性研究方面的文獻較少。文獻[10 -11]給出了一般性的恒星選擇標準,其認為雙星定位時,恒星方位角應在60° ~120°之間,以趨近90°最好;三星定位時,三星分布范圍要在180°以上,相鄰星體間方位角趨近120°最好,對于具體的理論依據,并未進行深入研究,尚無法給出基于天文觀測恒星幾何構型選星的理論依據。
為此,本文從天文定位基本原理出發,推導建立了天文定位誤差模型,以此為基礎,分析了影響天文定位精度的因素。在此基礎上,著重研究了恒星幾何構型分布中恒星方位角對天文定位的影響規律,并給出了判別恒星幾何構型中恒星方位角優劣的條件,為有效提高天文定位性能提供了理論參考依據。
1 天文定位誤差建模
天文定位的基本原理是通過觀測恒星的高度角和方位角進行定位的[12-13]。基于天文恒星觀測的天文定位基本原理如圖1所示。
圖1中,K 點為載體所在真實位置,C 為推算的載體位置,GP為觀測恒星的星下點。PNK、PNGP分別為過載體位置K 和恒星星下點GP的子午線,則為星下點相對于載體位置的方位線90° -h,h 即為觀測恒星的高度角,∠PNKGP為觀測恒星的方位角A. 恒星星下點相對于推算的位置點C 的方位線則方位線即為恒星高度與載體推算高度之間的高度差值Δh. 在天文定位過程中,通過天文敏感器,載體可測得恒星的高度角h 和方位角A,由推算的位置點C 可計算得到該恒星的計算高度角hc,從而得到高度差Δh 即方位線
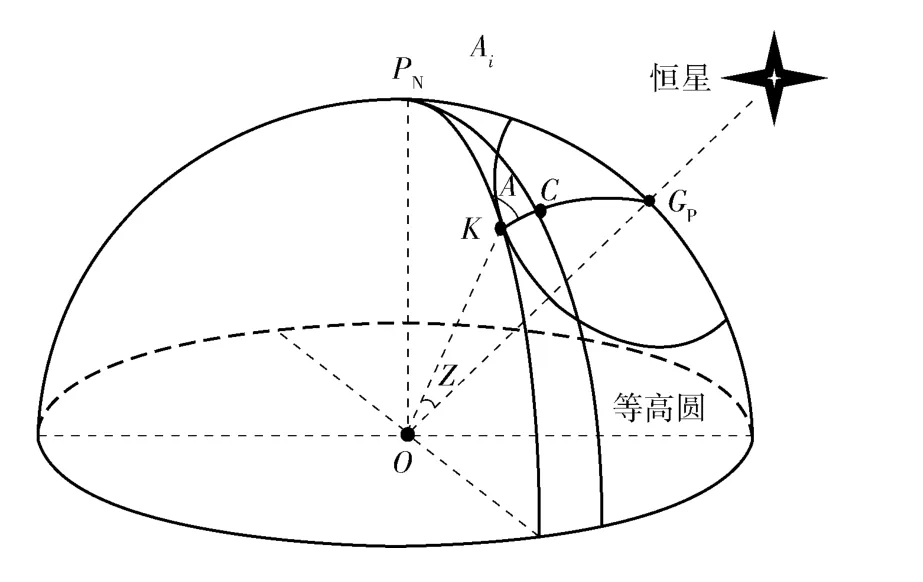
圖1 天文定位原理圖Fig.1 Schematic diagram of celestial positioning
以K 點為原點,東西向為x 軸,南北向為y 軸,建立如圖2所示的示意圖。
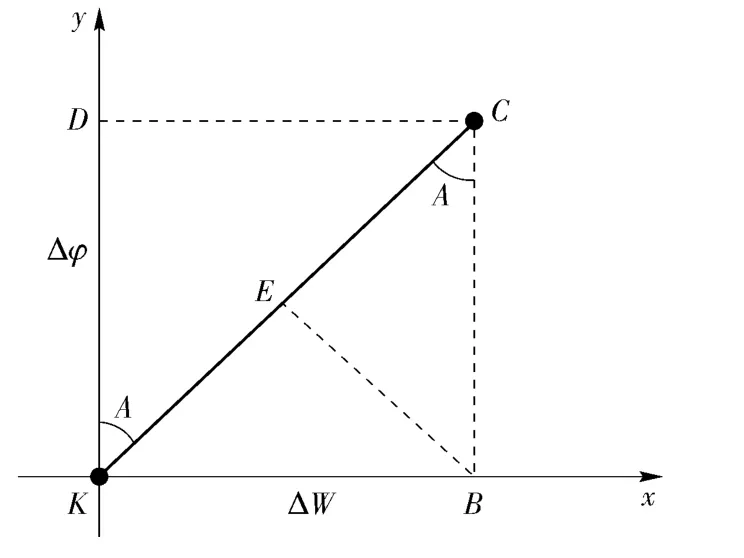
圖2 計算載體位置示意圖Fig.2 Position calculation of vehicle
根據圖2,可以獲得高度差的基本計算公式[14]如下:

式中:Δφ 為緯度誤差(即南北方向距離);ΔW =cos φ·Δλ(即東西方向距離),Δλ 為經度誤差。
當可觀測恒星數目大于1 時,根據(1)式可得多顆導航恒星觀測時的矩陣描述,即


當推算位置點為載體的實際位置時,高度差ΔH 即為測量誤差,不同恒星間的測量誤差互不相關。則有天文定位誤差協方差為
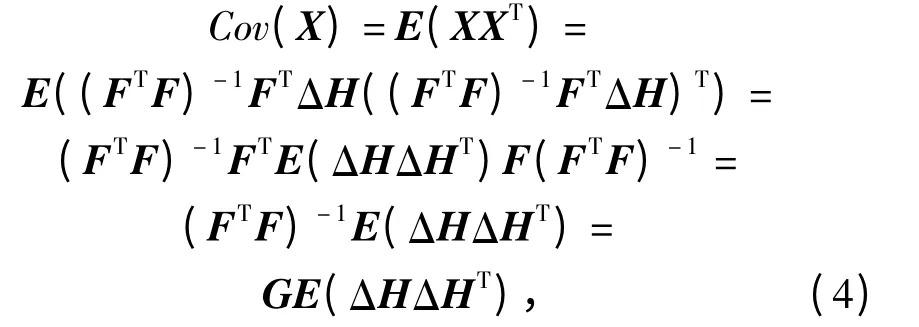
式中:矩陣G 定義為
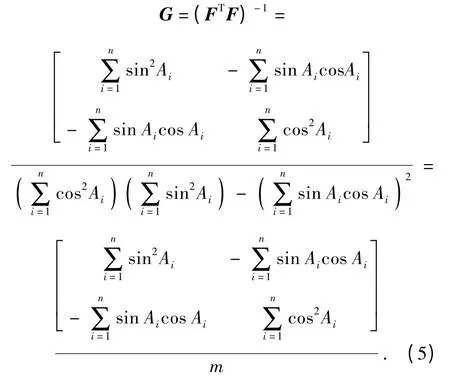
由(5)式可知,G 為2 ×2 的對稱矩陣。其中,m定義為
(4)式清晰地表明了高度差方差經由矩陣G 轉換為定位誤差的方差。根據(4)式可知,天文定位精度與以下兩方面因素有關:
1)測量誤差:恒星高度角測量誤差的方差越大,定位誤差X 的方差就越大。
2)恒星的幾何構型:矩陣G 取決于導航恒星的個數以及各個導航星的方位角。矩陣G 中的元素越小,則由測量誤差轉換為定位誤差的程度就越低。
2 恒星幾何構型對天文定位性能影響分析
2.1 基于恒星幾何構型的天文定位誤差模型
從第1 節的分析可以看出,在天文敏感器選定的條件下(高度角測量誤差一定),天文定位誤差主要受到恒星幾何構型分布的影響。為此,記恒星高度角測量誤差方差為σ2h,則由(4)式得
式中:g11和g22為系數陣G 的對角線元素。根據(5)式可得,g11=從而可以根據均方誤差分析定位精度:
下面將以天文導航中常用的雙星觀測和三星觀測為例,分析恒星幾何構型中恒星方位角對天文定位性能影響。
2.2 雙星觀測幾何構型下的天文定位誤差特性分析
首先分析雙星觀測條件下的定位性能,根據(6)式可得
則天文定位均方誤差為

即雙星觀測條件下天文定位誤差特性滿足(10)式. 由于A1,A2∈[0,2π],因而|A2-A1|∈[0,2π]. 由(10)式可知,在天文敏感器精度一定的情況下,天文定位誤差僅和導航星方位角之差A2-A1有關。當兩顆導航星方位角之差為90°或者270°時,m2值最大,此時誤差權系數因此,當兩顆導航星方位角之差接近90°或者270°時,雙星天文定位性能較優。
為形象描述恒星幾何分布中恒星方位角對天文定位性能的影響,下面從幾何角度進行分析。圖3給出了雙星觀測條件下天文定位誤差與恒星方位角之間的關系示意圖。
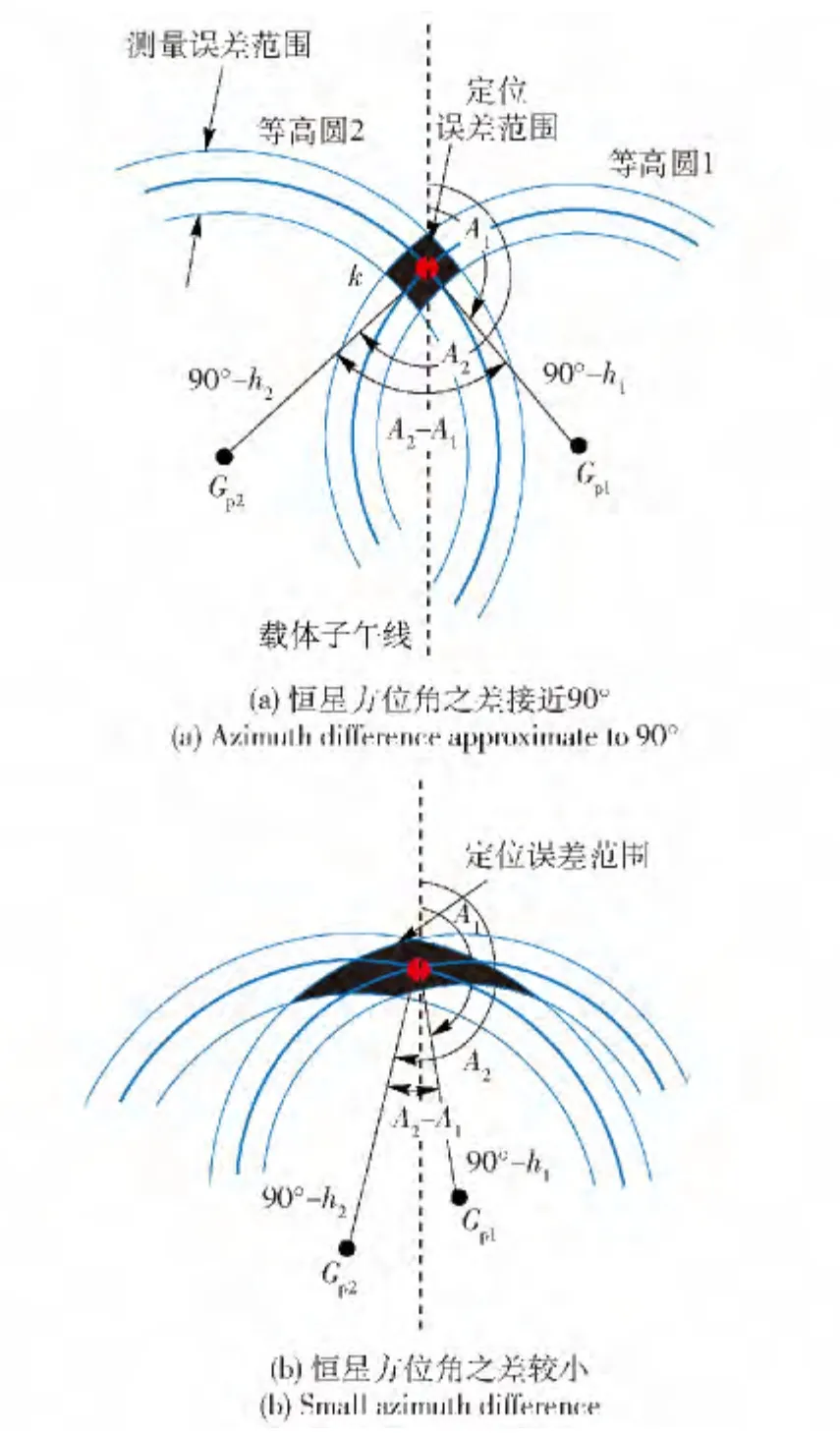
圖3 雙星觀測條件下天文定位誤差與恒星方位角之間關系Fig.3 Relationship between positioning error and azimuth under double-star observing condition
圖3中粗實線以恒星星下點GP為圓心,恒星頂距為半徑的等高圓圓弧,兩條細圓弧表示恒星高度角的測量誤差。載體真實位置為兩條粗實線的交點K,虛線為載體所在位置子午線。由載體子午線至方位線Gp1K 的夾角A1為恒星1 的方位角,由子午線至方位線Gp2K 的夾角A2為恒星2 的方位角,而陰影部分代表由高度測量誤差造成的定位結果可能的范圍。
從圖3(a)中可看出,當觀測的導航恒星方位角之差接近90°時,兩個等高圓相交的陰影部分面積小而集中;從圖3(b)中可看出,當觀測的導航恒星方位角之差較小時,即兩顆導航星相對于載體而言差不多處于同一個角度,此時相交的陰影部分面積明顯增大。對比上面兩圖,可發現圖3(a)中的恒星幾何構型優于圖3(b),其定位誤差范圍亦較小。
2.3 三星觀測幾何構型下的天文定位誤差特性分析
同樣,分析三星觀測條件下的定位性能,根據(6)式可得
記a=A2-A1,b=A3-A1,則A3-A2=b-a,則
則天文定位均方誤差為
即三星觀測條件下天文定位誤差特性滿足(13)式。經求解,在區間a∈[0,2π],b∈[0,2π]內,m3共有8 個最大值點,具體如表1所示。
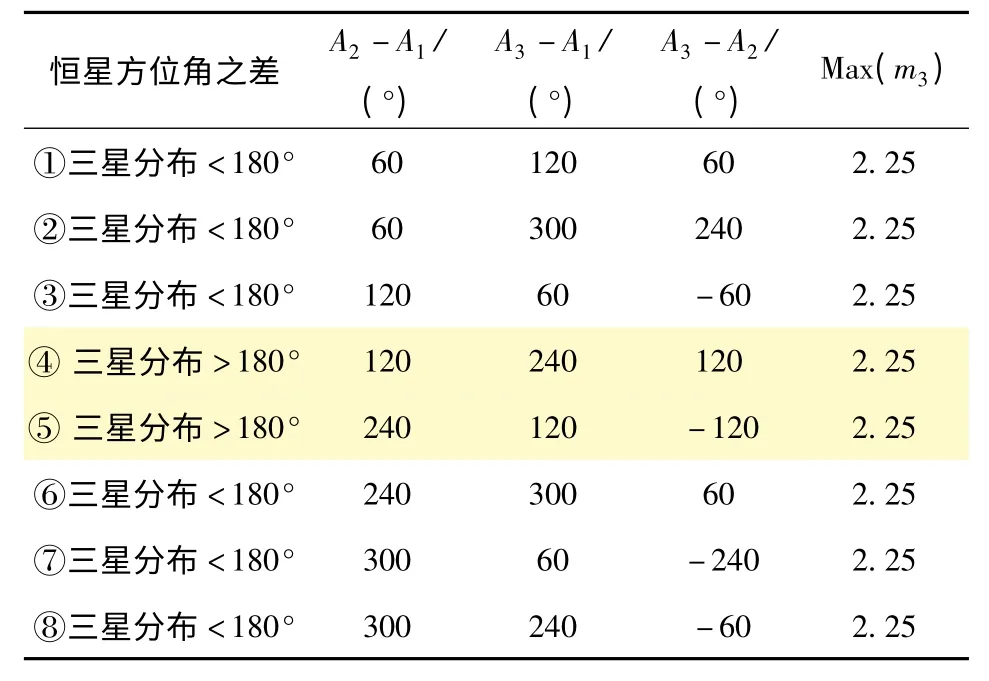
表1 m3 最大值時恒星分布情況Tab.1 Distribution of stars under matrix m3
采用與2.2 節中相同的幾何分析方法,來研究三星觀測情況下天文定位誤差與恒星幾何分布中方位角之間的關系。
圖4中:圖4(a)為表1中的第1 種情況,三星分布<180°;圖4(b)為表1中的第5 種情況,三星分布>180°. 對比圖4(a)、圖4(b)可發現,在這兩種情況下,3 顆導航星的等高圓相交的陰影部分形狀、大小相同,面積小而集中。圖4(c)為3 顆導航星相對于載體分布在同一側,三星分布<180°;圖4(d)為3 顆導航星相對于載體分布在兩側,三星分布>180°. 從圖4(c)、圖4(d)中可發現,在這兩種情況下,3 顆導航星的等高圓相交的陰影部分面積都較大。由此可見,三星定位中,天文定位性能優劣與恒星分布是否大于180°并無直接關系。
3 算法仿真分析
為驗證本文所提出的天文定位誤差模型的正確性,同時,測試導航星方位角對天文定位性能的影響,本節首先對天文導航雙星定位和三星定位分別進行靜態仿真,繼而結合飛行器動態飛行過程進行天文定位誤差特性綜合仿真。其中,靜態仿真基本條件如表2所示。高度角測量誤差設置為均值為0、標準差為10″的高斯白噪聲,仿真過程中,恒星之間的方位角之差以0.01°的變化率從0°~360°逐漸增加。
3.1 雙星觀測下的天文定位誤差特性分析
圖5和圖6給出了雙星定位時恒星幾何構型中恒星方位角對天文定位性能的影響。從仿真結果看,在區間[0,2π]內,當兩顆導航恒星方位角之差在[π/3,2π/3]和[4π/3,5π/3]之間時,天文定位性能較優;當兩顆導航恒星方位角之差接近0、π、2π時,天文定位誤差明顯增大,定位性能顯著下降。從圖6仿真曲線中可發現,天文定位均方根誤差特性與其誤差權系數特性一致,可見所建立的雙星條件下天文定位誤差模型是正確的。
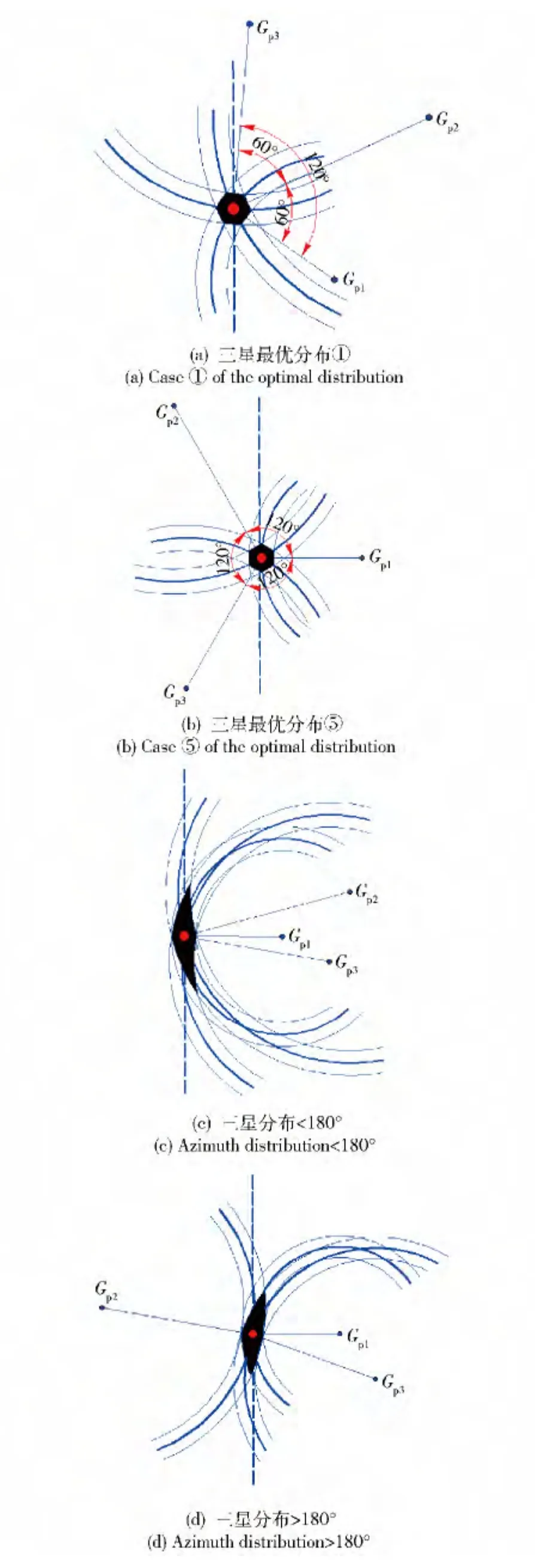
圖4 三星觀測條件下天文定位誤差與恒星方位角之間關系Fig.4 Relationship between positioning error and azimuth under tri-star observing condition
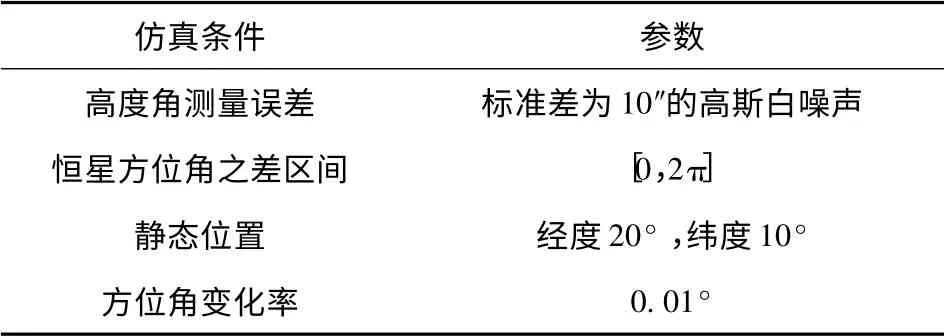
表2 靜態仿真基本條件Tab.2 Static simulation parameters
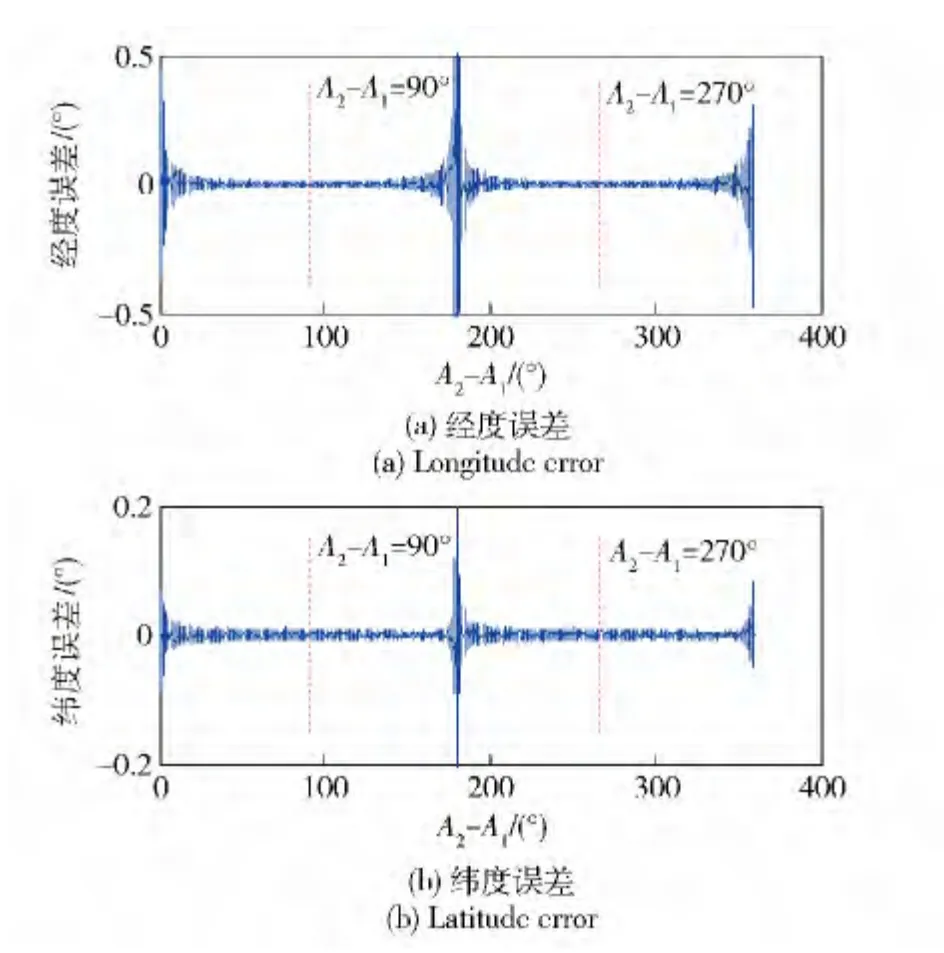
圖5 天文定位誤差曲線Fig.5 Error curves of celestial positioning
3.2 三星觀測下的天文定位誤差特性分析
圖7給出了三星定位時恒星幾何構型中恒星方位角對天文定位性能的影響,圖8給出了誤差權系數k 和恒星方位角的關系。對比圖7和圖8可發現,天文定位誤差特性與權系數誤差特性基本一致,可得所建立的天文定位誤差模型是正確的。從圖7仿真結果看,當三星幾何構型較差時,如其中兩顆星方位角之差接近0°、180°、360°時,定位誤差權系數明顯增大,天文定位性能明顯下降。
根據2.3 節分析可知,三星觀測下天文定位最優既存在三星分布>180°的幾何構型,也存在三星分布<180°的幾何構型,為進一步驗證恒星方位角分布是否大于180°對天文定位性能是否產生影響,選取以下3 組幾何構型進行仿真分析(見表3):恒星幾何構型A 為三星分布>180°;恒星幾何構型B、C 為三星幾何構型中最優的兩種,幾何構型B 三星分布<180°,幾何構型C 三星分布>180°.
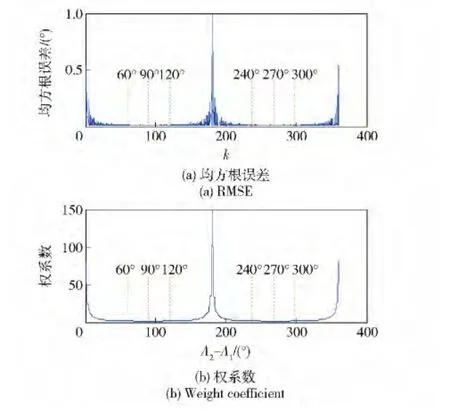
圖6 天文定位性能曲線Fig.6 Performance curves of celestial positioning
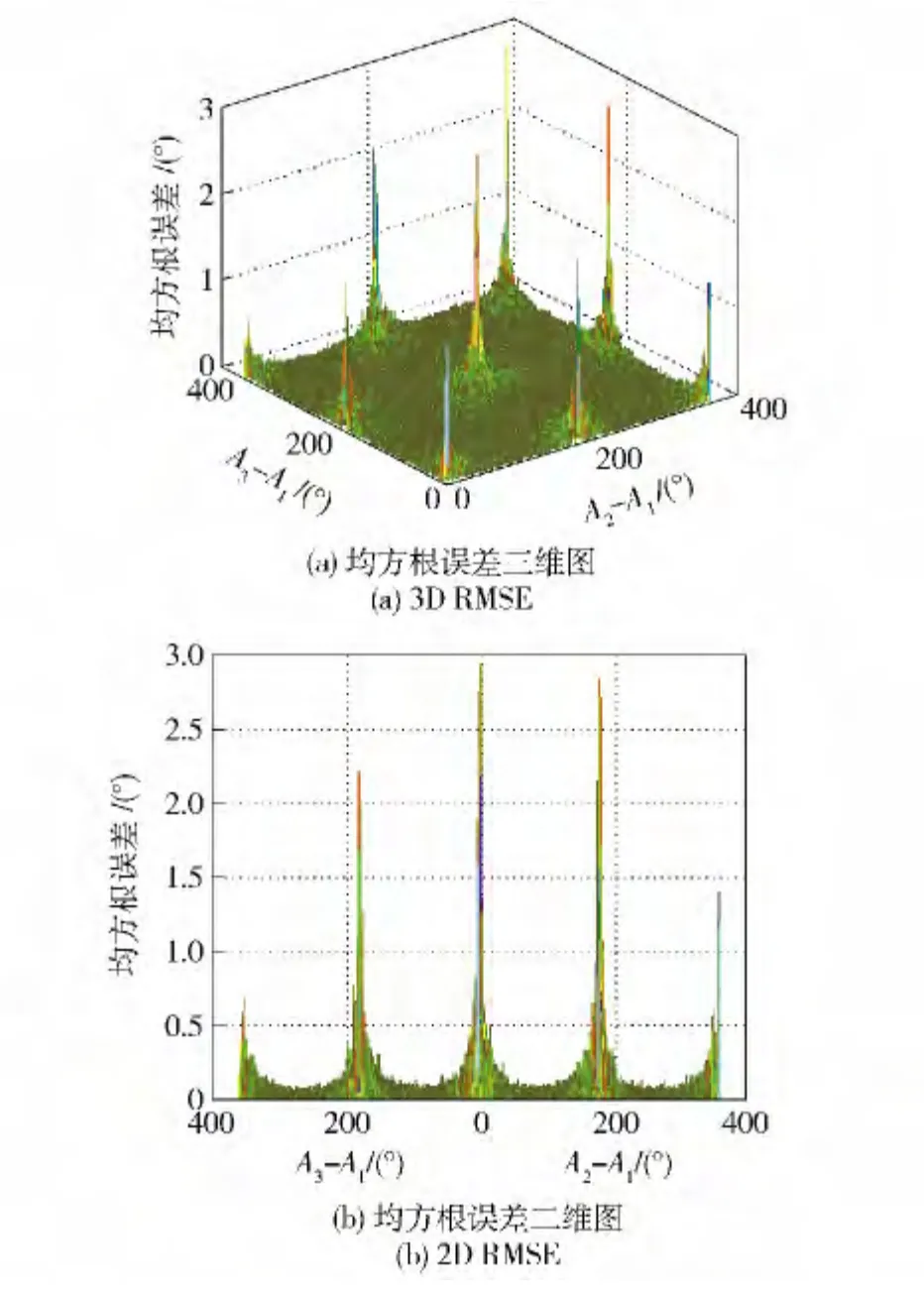
圖7 天文定位均方根誤差曲線Fig.7 RMSE curves of celestial positioning
如圖9所示,對比幾何構型A 和幾何構型C 下的天文定位性能,可發現A 情況下的天文定位誤差大于幾何構型C,恒星幾何分布>180°并不能保證天文定位性能較優。對比幾何構型B、C 下的天文定位性能,兩種情況下的天文定位性能基本一致。由此可見,天文三星定位時,在誤差權系數相同的情況下,恒星分布是否大于180°對天文定位性能不產生影響。

表3 三星幾何構型Tab.3 Distribution of stars
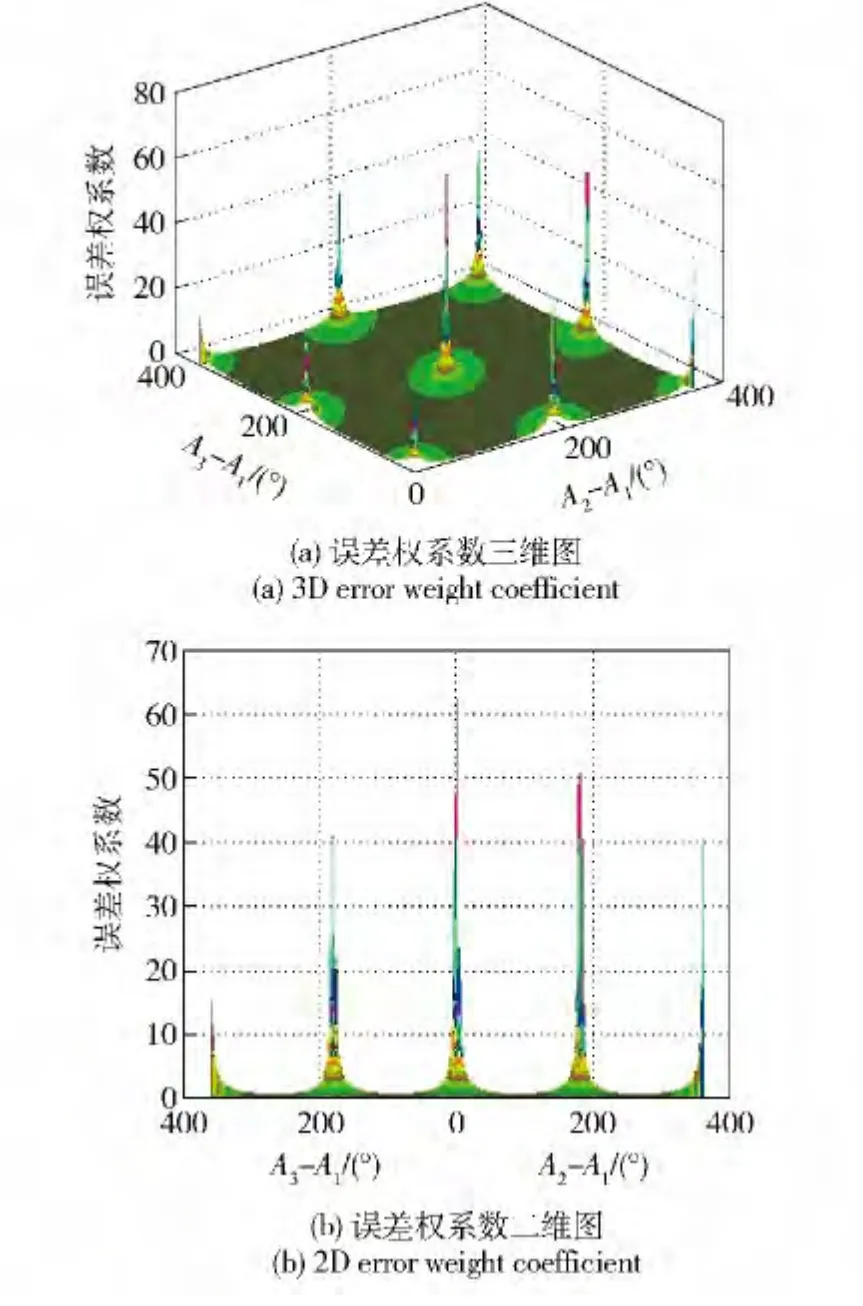
圖8 定位誤差權系數Fig.8 Error weight curves
3.3 基于恒星幾何構型的天文定位誤差特性綜合仿真分析
為進一步驗證所建立的天文定位誤差模型的正確性,下面將結合飛行器動態飛行過程,以雙星觀測為例,采用以下兩種方式進行仿真驗證:1)考慮恒星幾何構型中的方位角影響因素,以恒星方位角之差接近90°為標準進行導航星選擇;2)不考慮恒星幾何構型分布,將某一時刻飛行器觀測到的恒星進行編號(1,…,n),通過隨機排序(Matlab 中randperm 函數,基本為等概率原則),隨機選取觀測到恒星中的兩顆作為導航星。

圖9 天文定位均方根誤差曲線Fig.9 RMSE curves of celestial positioning
考慮到目前天文定位導航主要用在航天飛行器上,為較真實反應天文觀測情況,本文結合衛星工具包STK 軟件,以飛行高度為500 km 的近地軌道飛行器作為研究對象,構建飛行器飛行場景,分析天文定位誤差特性。其中,飛行器參數設定如表4所示,傳感器的觀測誤差如表2所示,為均值為0、標準差為10″的高斯白噪聲。飛行器飛行航跡如圖10(a)所示,三維飛行場景如圖10(b)所示。圖10(b)中地球表面的彩點為恒星的星下點,綠色曲線為飛行器飛行軌道,右側黃色錐型區域表示安裝的天文敏感器視場范圍,多根黃色直線表示該時刻由天文敏感器觀測到的恒星。
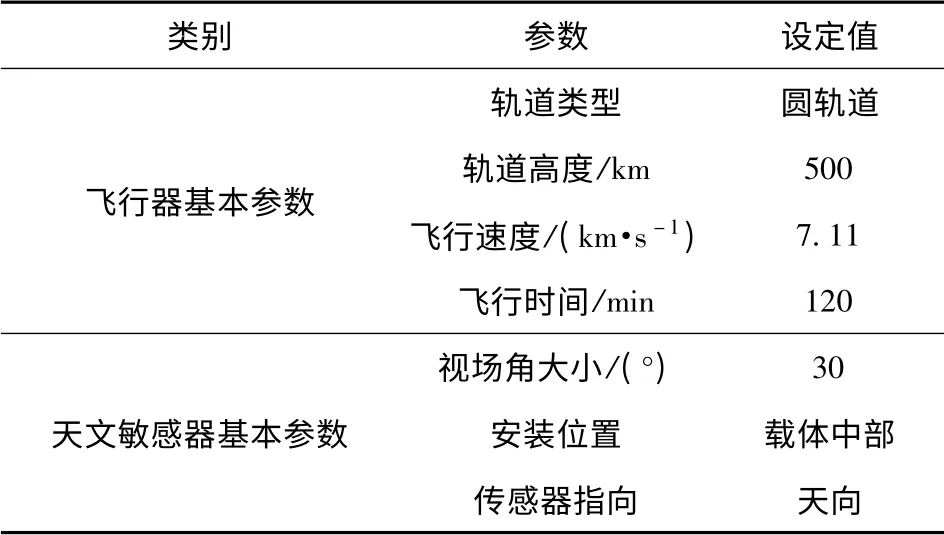
表4 飛行器參數設定Tab.4 Aerocraft parameters
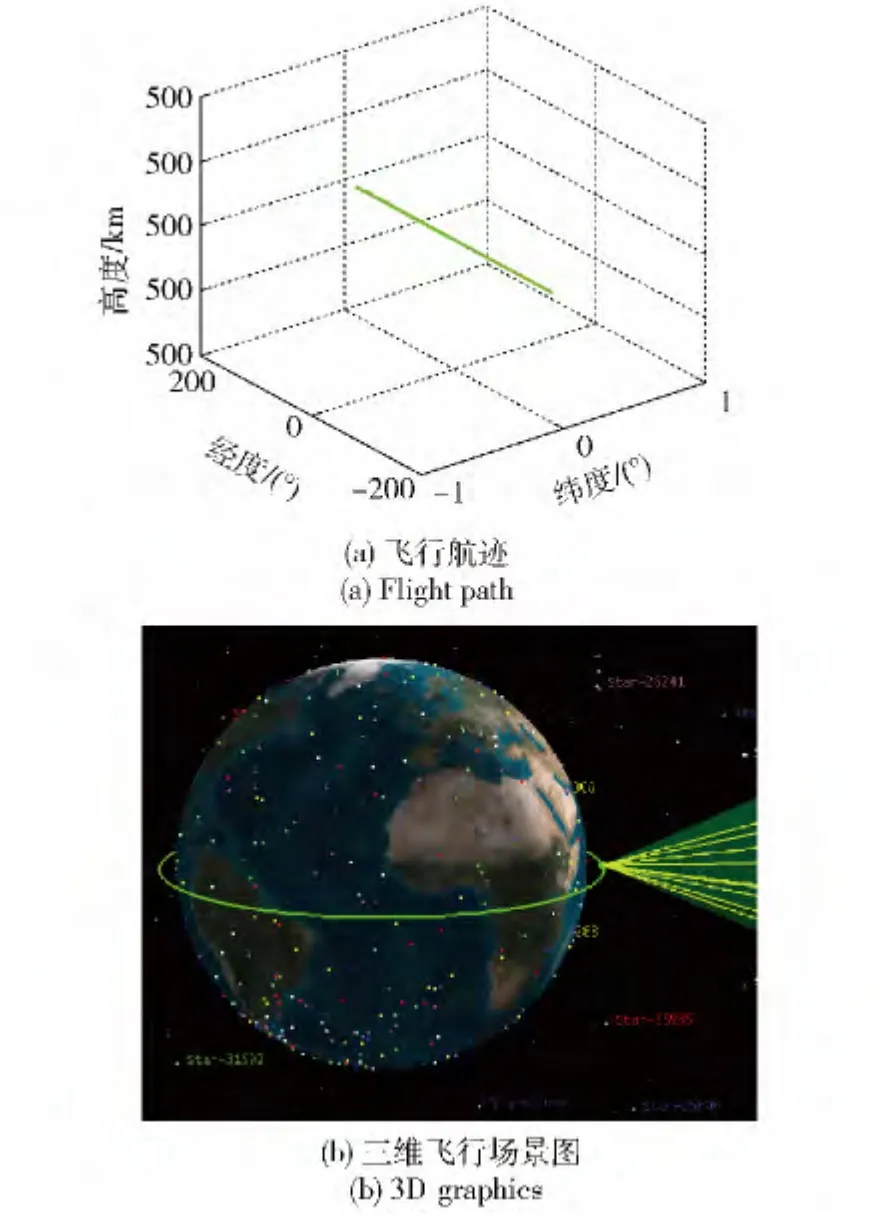
圖10 飛行器飛行航跡Fig.10 Aerocraft flight path
在飛行器飛行過程中,天文敏感器觀測到的恒星不斷變化,因而在數字仿真過程中,以1 min 為步長更新天文敏感器觀測的可見星。由于恒星分布并不均勻,因此飛行器不同時刻觀測到的恒星數目和恒星分布情況各不相同。圖11 給出了飛行器飛行過程中,天文敏感器觀測到的可見星數目變化情況。
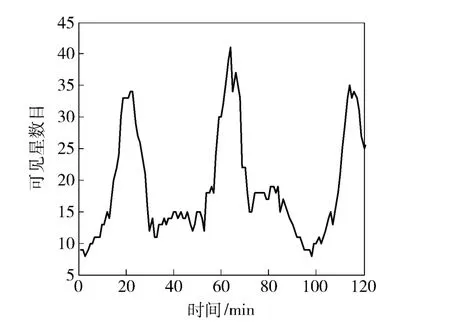
圖11 每一時刻觀測到的恒星數目Fig.11 Number of navigation stars
結合飛行器飛行航跡,根據上述兩種導航星選擇方式進行天文定位仿真,分析天文定位誤差特性。圖12 給出了方位角選星下的天文定位相關曲線,圖13 給出了隨機選星下的天文定位相關曲線。
從圖12(c)、圖13(c)可看出,在飛行器動態飛行過程中,不論是以方位角之差進行導航星選擇,或是采用隨機選星方式,其天文定位均方根誤差特性與其對應的誤差權系數曲線特性基本一致。由此可見,本文所建立的天文定位誤差模型正確,所給出的定位誤差權系數k 可有效反映天文導航系統定位性能。
圖12(a)、圖12(c)中在94 min 處出現一個尖峰,對照圖12(b),發現此時兩顆導航星之間的方位角之差為171.3°,較接近180°. 圖13(a)、圖13(c)中在31 min 處出現一個較大尖峰,對照圖13(b)發現此時兩顆導航星之間的方位角為0.14°,非常接近0°. 從雙星觀測下的天文定位誤差特性分析中可知,當導航星方位角之差接近0°、180°時,天文定位性能較差,因而定位性能曲線中出現尖峰可以得到合理解釋。
對比圖12(b)、圖13(b)可看出,采用方位角選星時導航星方位角之差曲線較接近所設定的90°且曲線平滑,而采用隨機選星時導航星方位角之差曲線波動較大且出現較多值接近0°或180°. 對應其天文定位性能曲線圖12(c)、圖13(c)可發現,方位角選星情況下的天文定位性能明顯優于隨機選星情況下的天文定位性能。以方位角之差作為導航星選擇條件的天文定位誤差量級較小且曲線較為平滑。從表5天文定位性能統計數據中亦可看出,采用方位角選星進行天文定位,其經度、緯度誤差量級較小,接近于高度角測量誤差10″,而采用隨機選星方式進行天文定位時,天文定位誤差量級較大。由此可見,恒星幾何構型中的恒星方位角分布對天文定位性能存在較大影響,選擇方位角之差接近90°的恒星作為導航星可有效減小天文定位誤差,提高天文定位性能。
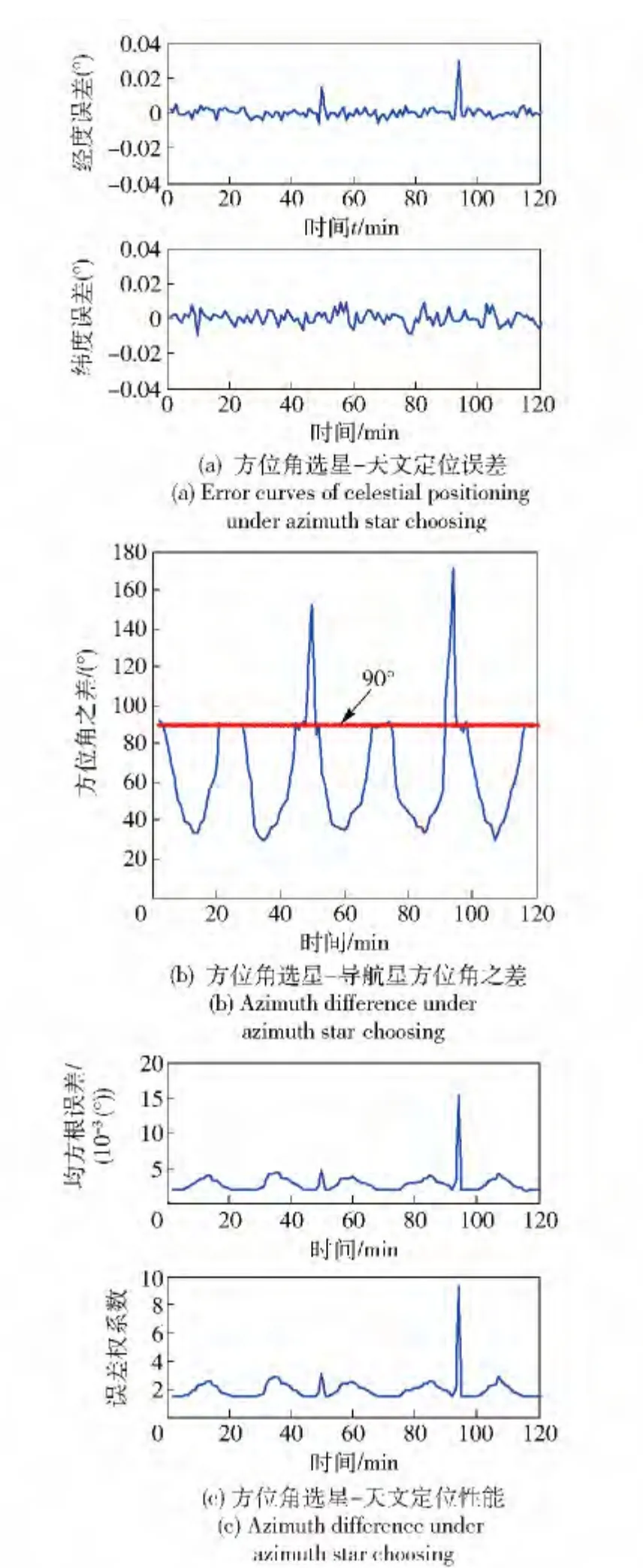
圖12 方位角選星下的天文定位曲線Fig.12 Celestial positioning curves under azimuth star choosing
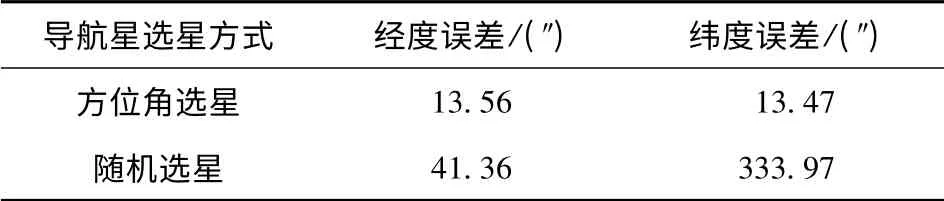
表5 天文定位性能Tab.5 Celestial positioning performance
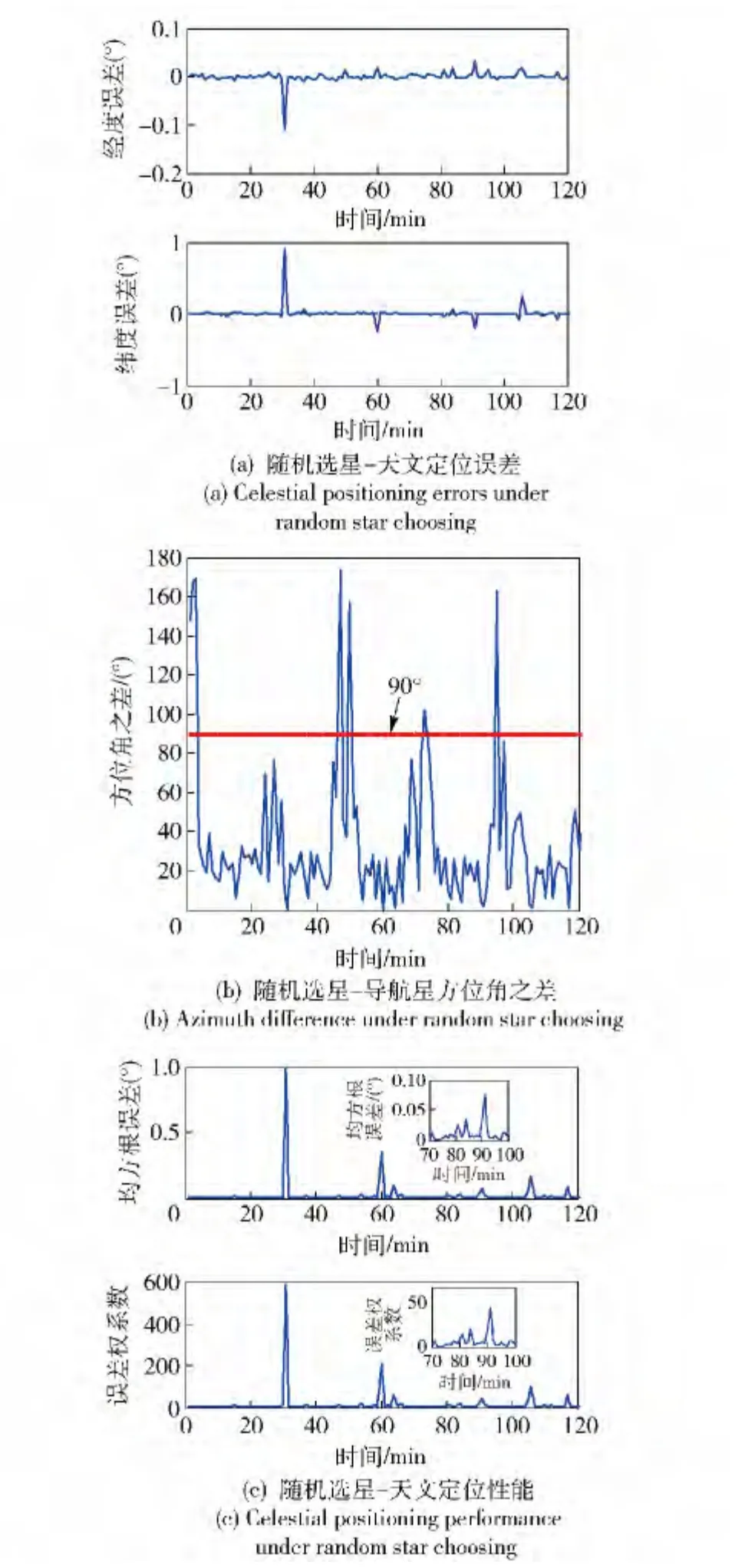
圖13 隨機選星下的天文定位曲線Fig13 .Celestial positioning curves under random star choosing
從上述靜態仿真和動態仿真結果看,本文所給出的天文定位誤差權系數k 可有效反映天文定位過程中的誤差特性,由此可證明本文所建立的天文定位誤差模型正確有效。
4 結論
天文導航系統作為高自主、高可靠性的導航系統,其重要性不言而喻。如何有效分析天文定位誤差、選擇合適的導航星是提高其定位性能的前提之一。本文從天文定位基本原理出發,建立了天文定位誤差模型,給出了在天文觀測精度一定的條件下,天文定位誤差權系數k 的表達式。而后以雙星定位和三星定位為例,分析了恒星幾何構型中恒星方位角對天文定位性能的影響,給出了雙星觀測和三星觀測條件下天文定位性能較優的恒星分布。最后,將所提出的天文定位誤差模型分別用于雙星定位、三星定位以及飛行器動態飛行過程進行仿真驗證。仿真結果表明,所提出的天文定位誤差模型正確且可有效用于天文定位性能分析,為天文導航選星提供了參考。
References)
[1]房建成,寧曉琳. 天文導航原理及應用[M]. 北京:北京航空航天大學出版社,2006:3 -9.FANG Jian-cheng. NING Xiao-lin. The theory and application of celestial navigation[M]. Beijing:Beijing University Press,2006:3 -9. (in Chinese)
[2]楊淑潔,楊功流,單友東,等. 空天飛行器SINS/CNS 深組合導航算法[J]. 中國慣性技術學報,2013,21(4):478 -483.YANG Shu-jie,YANG Gong-liu,SHAN You-dong,et al. SINS/CNS tightly integrated navigation algorithm for aerospace vehicles[J]. Journal of Chinese Inertial Technology,2013,21(4):478 -483. (in Chinese)
[3]何炬. 國外天文導航技術發展綜述[J]. 艦船科學技術,2006,27(5):91 -96.HE Ju. Survey of overseas celestial navigation technology development[J]. Ship Science and Technology,2006,27(5):91 -96. (in Chinese)
[4]Eduardo dos Santos Pereira. Determining the fixed pattern noise of a CMOS sensor:improving the sensibility of autonomous star trackers [J]. Journal of Aerospace Technology and Management,2013,5(2):217 -222.
[5]Ning X,Fang J. An autonomous celestial navigation method for LEO satellite based on unscented Kalman filter and information fusion[J].Aerospace Science and Technology,2007,11(2):222-228.
[6]Hancock B R,Stirbl R C,Cunningham T J,et al. CMOS active pixel sensor specific performance effects on star tracker/imager position accuracy[C]∥SPIE Proceedings of Optics,Electromechanics and Electronics. San Jose,CA:SPIE,2001:43 -53.
[7]劉壘,張路,鄭辛,等. 星敏感器技術研究現狀及發展趨勢[J]. 紅外與激光工程,2007,36(z2):529 -533.LIU Lei,ZHANG Lu,ZHENG Xin,et al. Current situation and development trends of star sensor technology[J]. Infrared and Laser Engineering,2007,36(z2):529 -533. (in Chinese)
[8]廖志波,伏瑞敏,宗肖穎. 星敏感器遮光罩的優化設計[J].中國激光,2010,37(4):987 -990.LIAO Zhi-bo,FU Rui-min,ZONG Xiao-ying. Optimal designing of baffle of star sensor[J]. Chinese Journal of Lasers,2010,37(4):987 -990. (in Chinese)
[9]Wu Z,Yang J,Su D. Experimental study for the effects of stellar spectrums on the location accuracy of a star sensor[C]∥International Symposium on Photo electronic Detection and Imaging 2011.US:International Society for Optics and Photonics,2011.
[10]施聞明,楊曉東. 天文定位中選星系統的建模與仿真[J].系統仿真學報,2007,19(7):1428 -1429.SHI Wen-ming,YANG Xiao-dong. Modeling and simulation on star-choosing in celestial positioning[J]. Journal of System Simulation,2007,19(7):1428 -1429. (in Chinese)
[11]王洪振. 航用天體位置計算及自動選星研究[D]. 大連:大連海事大學,2012.WANG Hong-zhen. The position calculation of marine celestial body and automatic star-choosing in celestial positioning[D].Dalian:Dalian Maritime University,2012. (in Chinese)
[12]于永軍,劉建業,熊智,等. 基于多圓迭代和H∞濾波的捷聯/天文定位算法研究[J]. 控制與決策,2011,26(5):717 -720.YU Yong-jun,LIU Jian-ye,XIONG Zhi,et al. Research on SINS/CNS integrated navigation algorithm based on multi-circles intersection celestial positioning algorithm and H∞filter[J].Control and Decision,2011,26(5):717 -720. (in Chinese)
[13]熊智,劉建業,郁豐,等. 基于天文角度觀測的機載慣性/天文組合濾波算法研究[J]. 宇航學報,2010,31(2):397 -403.XIONG Zhi,LIU Jian-ye,YU Feng,et al. Research of airborne INS/CNS integrated filtering algorithm based on celestial angle observation[J]. Journal of Astronautics,2010,31(2):397 -403,2010. (in Chinese)
[14]程祿,焦傳道,黃德鳴. 船舶導航定位系統[M]. 北京:國防工業出版社,1991:103 -110.CHENG Lu,JIAO Chuan-dao,HUANG De-ming. Marine navigation and positioning systems[M]. Beijing:National Defense Industry Press,1991:103 -110. (in Chinese)
