改進的三相感應電機直接轉矩控制建模與仿真*
2015-03-02 06:26:16周斌欣
機電工程 2015年8期
謝 莉 ,蔣 偉 ,周斌欣 ,吳 松
(1.揚州大學水利與能源動力工程學院,江蘇揚州225127;2.揚州大得機電科技有限公司,江蘇揚州225000)
0 引 言
隨著現代電力電子、微電子技術和控制理論的發展,交流電機調速性能日益完善,足以和直流調速相媲美,被廣泛應用于工農業生產、交通、國防和日常生活中[1-4]。
直接轉矩控制直接將定子磁鏈和轉矩作為控制變量,無需進行磁場定向、矢量變換和電流控制,因此更為簡捷和快速[5-7]。目前,它已成為各種交流調速方法中研究最多、應用前景最廣的交流調速方法之一[8]。
直接轉矩控制技術最早由德國魯爾大學教授M.Depenbrock 提出。后來的學者針對直接轉矩控制方法提出了很多改進[9-10]。
本研究利用Matlab/Simulink 平臺構造改進的三相感應電機直接轉矩控制系統,并給出仿真結果。
1 改進的直接轉矩控制原理
在定子三相軸系中,定子磁鏈和轉子磁鏈矢量可表示為:
電磁轉矩可表示為:

式中:ψs—定子磁鏈矢量,ψr—轉子磁鏈矢量,is—定子電流矢量,ir—轉子電流矢量,Lm—勵磁電感,Ls—定子電感,Lr—轉子電感,p—極對數。
傳統直接轉矩控制由滯環比較器的輸出信號來確定磁鏈和轉矩的變化量,根據兩者的變化量及磁鏈所在扇區直接選擇兩個相鄰電壓矢量。該方法僅僅是一個定性的分析,并未作定量計算,在運行過程中容易出現超出現象,且頻率不固定,實際生產中不易實現。本研究針對其缺點進行了改進,計算出了確定的電壓矢量及其所在扇區,將其分解為該扇區兩個相鄰矢量,并準確計算出兩個矢量的作用時間,不會出現溢出現象。
控制原理如圖1 所示。
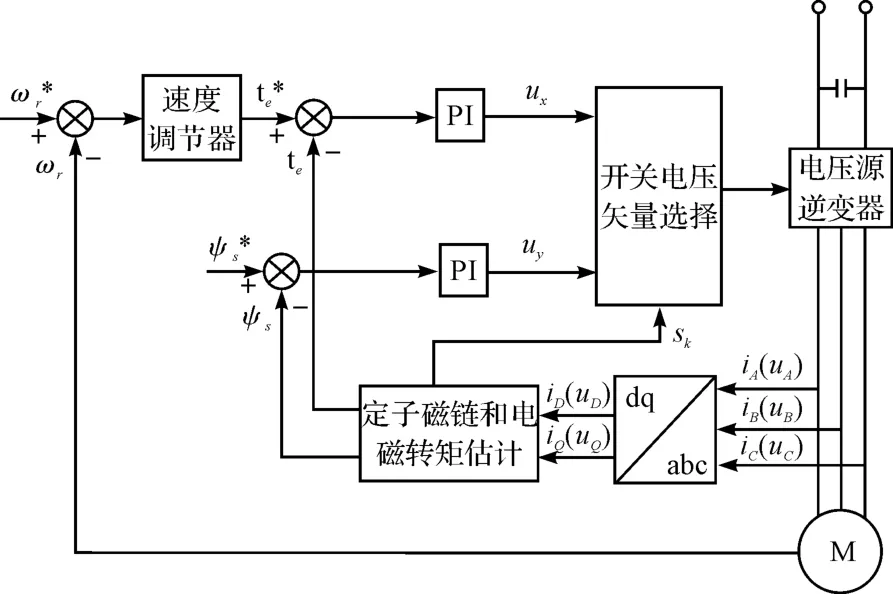
圖1 直接轉矩控制系統原理圖
本研究利用測得的電流和電壓矢量辨識定子磁鏈和轉矩,與磁鏈和轉矩給定值相比較后,將其差值分別輸入兩個PI 控制器,分別產生電壓矢量的兩個分量ux、uy,將兩個矢量分量合成后得到電壓矢量的幅值和角度,進而控制磁鏈和轉矩。
2 系統仿真模型
本研究根據改進的直接轉矩控制理論和系統原理圖,利用Matlab/Simulink2010b 構建了仿真模型。
2.1 dq 變換
為滿足ABC 軸系定子三相電流iA、iB和iC產生的磁動勢與兩相定子電流iD和iQ產生的磁動勢相等,可得
2.2 定子磁鏈和電磁轉矩估計模型
定子磁鏈估計采用電壓-電流模型,本研究通過其dq 分量來估計其幅值和相位:
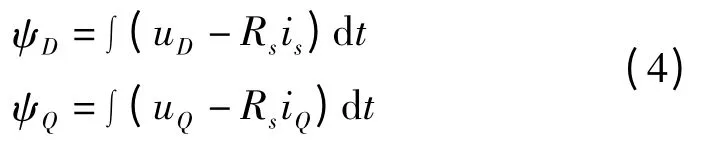
式中:uD,uQ,iD,iQ—dq 軸系的坐標變化而得;Rs—定子繞組電阻阻值。
則定子磁鏈可表示為:
由式(2)可以得到電磁轉矩的估計值,即有:

式中:ψD,ψQ—估計值;iD,iQ—實測值;ρs—定子磁鏈的角度。
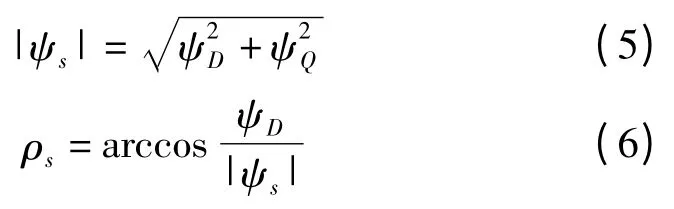
2.3 定子磁鏈和電磁轉矩調節器
本研究將估算得到的定子磁鏈和轉矩與對應的給定值相比較,將其差值輸入兩個PI 控制器,分別產生電壓矢量的兩個分量ux、uy,定子磁鏈調節器如圖2 所示。
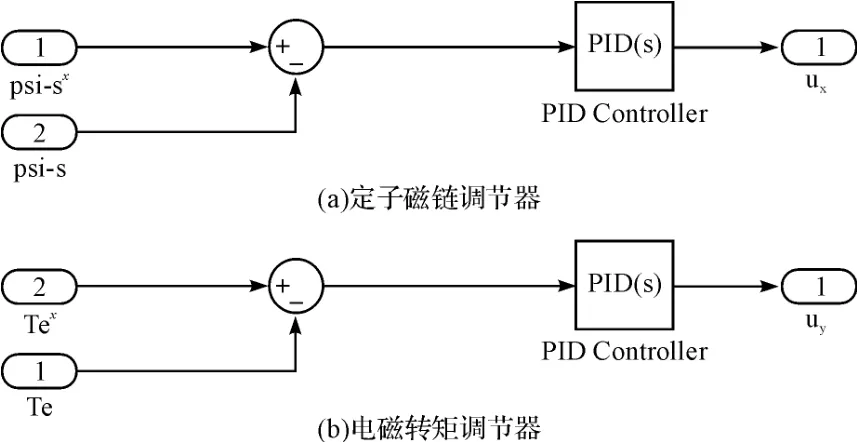
圖2 定子磁鏈、電磁轉矩調節器
2.4 電壓矢量選擇
本研究將磁鏈調節器和電磁轉矩調節器產生的電壓矢量分量ux和uy進行合成,得到uxy的大小和方向,再將uxy分解到所在扇區的相鄰兩個分量usk、usk+1。各扇區電壓矢量分解圖如圖3 所示。
以第一扇區為例,如圖3(a)所示,根據正弦定理可知:

式中:um—向量us1的長度,un—向量us2的長度。
進而可得:

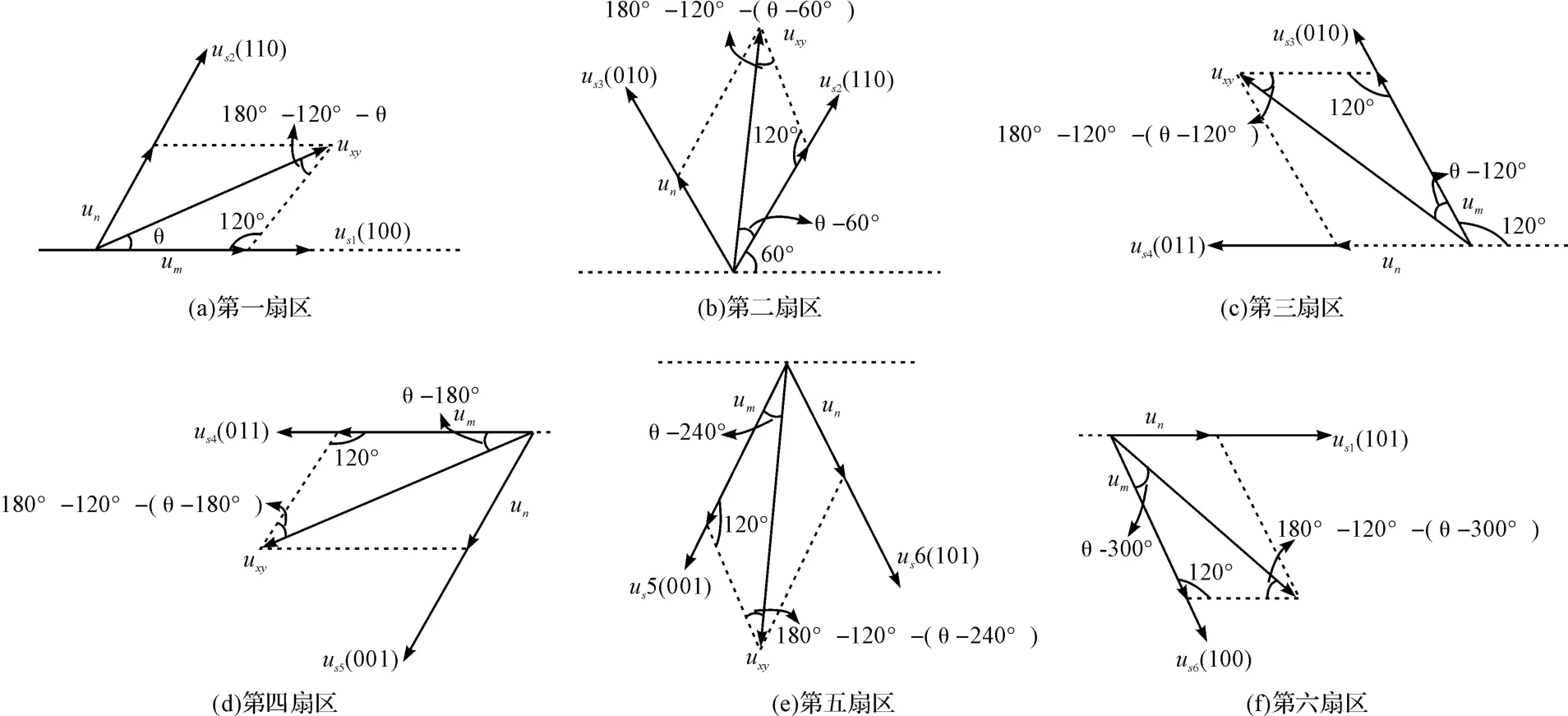
圖3 各扇區電壓矢量分解圖
式中:T—PWM 周期,t1—向量us1的作用時間,t2—向量us2的作用時間,t0—零矢量的作用時間。
根據各電壓矢量分量可以合成三相電壓:
式中:UA,UB,UC—逆變器輸出A、B、C 三相電壓;Udc—電壓源逆變器的直流輸入。
其他扇區計算與此類似,此處不再贅述。
4 仿真結果及分析
仿真所用交流電機參數:
額定功率PN=75 kW,額定電壓VN=400 V,額定電流IN=184 A,額定頻率f =50 Hz,額定轉速nN=1 484 r/min,極對數p =2,定子電阻Rs=0.035 52 ohm,轉子電阻Rr=0.020 92 ohm,定子漏感Ls=0.000 335 H,轉子電感Lr=0. 000 335 H,定轉子之間互感Lm=0.015 1 H,額定磁鏈為1 Wb。參考速度為350 r/min[11]。
實際仿真中,磁鏈給定0.8 Wb,轉速給定值為110 rad,筆者將傳統直接轉矩控制方法與本研究提出的方法進行對比。
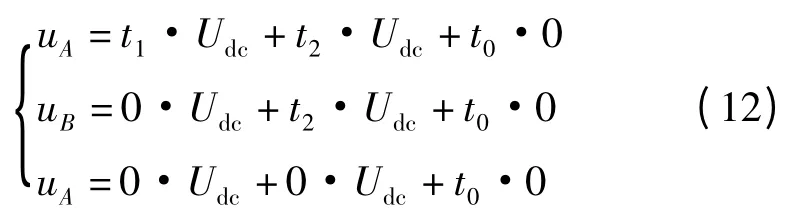
轉速曲線如圖4 所示。
由圖4(a)、4(b)可以看出,傳統方法需要0.9 s 轉速才能達到給定,而本研究提出的方法只需0.8 s 即可,響應速度明顯較快,且能保持為110 rad/s。
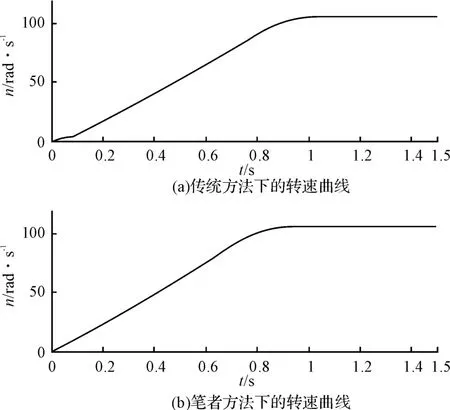
圖4 轉速曲線
磁鏈軌跡如圖5 所示。
由圖5(a)、5(b)可以看出,本研究提出的方法比傳統方法的磁鏈軌跡更圓,且沒有超出現象。
電磁轉矩曲線如圖6 所示。
由圖6(a)、6(b)可以看出,恒負載20 N·m 下,傳統控制方法轉矩脈動接近30 N·m,波動較大,本研究提出的方法響應快,穩定后轉矩保持給定,基本無波動。
綜上,采用本研究提出的方法,轉速和轉矩在很短的時間內達到給定值并保持穩定,磁鏈軌跡滿足圓形,且波動小于±4‰。由此可見,采用本研究提出的直接轉矩控制方法,三相感應電機具有響應速度快、暫態時間短,波動小、磁鏈幅值保持恒定和系統性能受轉子參數影響小等優點,充分證明了其優越性和有效性。但該控制方法也有其不足之處,即穩定過程中電磁轉矩也有紋波存在,這可以通過調節控制器參數來加以該改善。
圖5 磁鏈軌跡

圖6 電磁轉矩曲線
4 結束語
本研究針對傳統直接轉矩控制的缺點進行了改進,提出了新型的控制方案,計算出了確定的電壓矢量大小和方向,不會出現溢出現象,磁鏈和轉矩脈動小;利用Matlab/Simulink 構造了改進的三相感應電機直接轉矩控制系統模型,并給出了仿真結果。
仿真結果證明,三相感應電機具有響應速度快、暫態時間短,波動小、磁鏈幅值保持恒定、系統性能受轉子參數影響小等優點,該方法能夠高速、有效地實現定子磁鏈定向和轉速調節,較好地實現了磁鏈和轉矩控制。
[1]朱軍麗. 基于模糊控制的交流電機直接轉矩控制研究[D].沈陽:東北大學信息科學與工程學院,2013.
[2]李 玥,解大琴.三相交流電機直接轉矩控制研究[J].寶雞文理學院學報:自然科學版,2013,33(2):45-48.
[3]程啟明,程尹曼,王映斐,等.交流電機控制策略的發展綜述[J].電力系統保護與控制,2011,39(9):145-154.
[4]郭建華.三相交流電機直接轉矩控制研究[J]. 科技風,2014(13):59.
[5]王德友,田運濤,熊維兵.交流電機直接轉矩控制策略的分析與比較[J].機電技術,2012(5):107-110.
[6]李海軍,盧云峰.電動自卸車驅動電機直接轉矩控制系統的實現[J].長春理工大學學報(高教版),2010,5(2):169-170.
[7]王 琳.矢量控制與直接轉矩控制技術[J]. 價值工程,2014(28):64-65.
[8]劉昆汶,郭俊宇,趙 鑫.基于DTC 技術的交流電機控制方法研究[J].機械工程與自動化,2011(3):202-205.
[9]張 偉.直接轉矩控制系統的仿真研究[J].黑龍江科技信息,2011(17):18.
[10]陳 靜,張省偉.交流電機直接轉矩控制改進方案[J].電子設計工程,2009,5(17):112-114.
[11]張 瑩.交流電機變頻調速控制的設計[J].機械制造與自動化,2013(4):152-155.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
科教新報(2022年12期)2022-05-23 06:34:16
今日農業(2021年14期)2021-10-14 08:35:28
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
海峽姐妹(2020年8期)2020-08-25 09:30:18
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56