基于ORB和改進RANSAC算法的圖像拼接技術
2015-03-07 08:27:36佘建國徐仁桐
江蘇科技大學學報(自然科學版) 2015年2期
佘建國,徐仁桐,陳 寧
(1.江蘇科技大學機械工程學院,江蘇鎮江212003)
(2.江蘇科技大學能源與動力工程學院,江蘇鎮江212003)
照片拼接是將同一個場景的若干照片進行配準,找到重疊區域,進行重疊區域對齊、變換、融合,組成一幅視野寬廣的場景圖片[1].照片拼接技術已廣泛應用于海事、軍事、遙感、視頻監控等領域.
ORB算法是Roblee E等人在2011年的ICCV(IEEE international conference on computer vision)提出的一種匹配算法,其運算速度與SIFT相比,SURF算法有了很大的提升.ORB 是一種局部不變特征描述子,對照片圖像的平移、旋轉、縮放等矩陣變換具有不變性.該算法思想是在圖像金字塔上利用改進的FAST進行角點特征檢測,并確定主方向,使特征點有一定的尺度不變性[2];然后用改進的BRIEF描述特征,使描述符有一定的旋轉不變性.
使用ORB進行粗匹配后,針對某些不正確的匹配,文中設計了一種改進的RANSAC算法,對誤匹配進行剔除.
1 ORB算法實現粗匹配
1.1 ORB 特征檢測
該文采用 oFAST(oriented FAST)算子進行ORB特征檢測.oFAST特點是給FAST算子檢測到的角點添加方向信息.它首先采用Harris算法檢測角點.FAST檢測的角點定義[3]是:若某像素點與其周圍鄰域內足夠多的像素點處于不同的區域,則該像素點可能為角點.如圖1所示,從圖片中選取一個像素點P,并設其像素值為XP;將該像素點與周圍的16個像素點進行比較,若這個以P點為圓心,16個像素點組成的圓上有N個連續像素點,其像素值要么都比XP+T(T為選取的閾值)大,要么比XP-T小,那么它就是一個角點,N一般取9或者12.
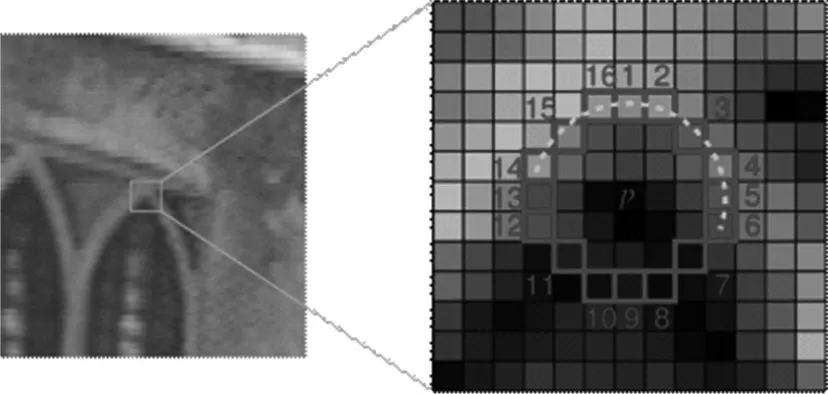
圖1 FAST角點檢測Fig.1 FAST corner detection
然后,FAST角點主方向運用 Intensity Centroid[4]來運算.FAST角點主方向通過圖像團塊的灰度矩來確定,定義如式(1)所示,其中,q決定了灰度矩的階數,I(x,y)為點(x,y)處的灰度值.

灰度矩心設為C=(Cx,Cy),其中因此,角點區域的主方向為:

利用角點主方向,就可提取BRIEF描述子.為了提高算法的旋轉不變性,需要確保x,y在鄰域半徑為 r的圓形區域內,即 x,y ∈[-r,r].
1.2 ORB 特征描述
文中采用rBRIEF(rotated BRIEF)算法來進行ORB特征描述.原理是從oFAST算法檢測出的所有角點中找到效果良好的點對,用來描述圖像特征.一般角點大小為31×31[5],在 ORB 算法中用ORB::CommonParams(1.2,1,31)體現,二進制測試對的每個區域窗口大小為5×5.將角點測試對進行灰度差異二值化的公式如式(3),其中x,y表示角點的位置.

選擇n個角點位置(x,y),對其進行特征運算,如式(4).

n可以取128,256等數值,數值不同會影響運行速度、識別率、存儲率.ORB本身不具備旋轉不變性[6],解決辦法是將角點主方向作為BRIEF的主方向.設有n對位置坐標(xi,yi),構造2×n矩陣:
對2×n矩陣進行旋轉變換,變換矩陣采用角點主方向θ的旋轉矩陣,使得M矩陣變成有向形式,如式(5)所示.

所以得出rBRIEF描述子結果為:

1.3 ORB粗匹配編程
VS2010是微軟推出的集成開發環境,數字圖像處理是其主要功能之一,但單純使用VS2010處理圖像難度很大.OpenCV擁有許多圖像處理函數[7],若將其和VS2010結合,便會降低工作難度,減少工作量.因此,文中的ORB編程采用OpenCV嵌入到VS2010實現.
文中首先安裝OpenCV2.3.1版本,選擇屬性>高級系統設置>環境變量>新建,新建一個用戶變量,將安裝的OpenCV的lib路徑作為其變量值.然后在VS2010下新建一個項目,右擊選擇屬性>配置屬性>VC++目錄,引入OpenCV的包含目錄和庫目錄.接著在Debug和Release的附加依賴項中引入opencv_calib3d231d.lib,opencv_highgui231d.lib 等庫文件.配置成功后,編程時要在程序的開頭包含OpenCV 的頭文件,如 cv.h,highgui.h 等.文中實現ORB算法檢測的C++關鍵代碼如下:
ORB orb;
/*引入OpenCV庫中的ORB特征類*/
vector<KeyPoint> Pts1,Pts2;/* 創建對象類型為Keypoint類的兩個容器以存儲特征點*/
Mat describer1,describer2;
/*定義存放特征向量的兩個矩陣*/
orb(image1,Mat(),Pts1,describer1);orb(image2,Mat(),Pts2,describer2);
BruteForceMatcher<HammingLUT> matcher;/*定義一個BurteForceMatcher對象*/
vector<DMatch> matches;
matcher.match(describer1, describer2, matches);/*對特征向量進行匹配*/
采用一對540×380像素的圖像進行粗匹配,運行結果如圖2,其中a),b)為特征點檢測,c)為特征點粗配準.發現有一些誤匹配存在,需用RANSAC去除誤匹配.
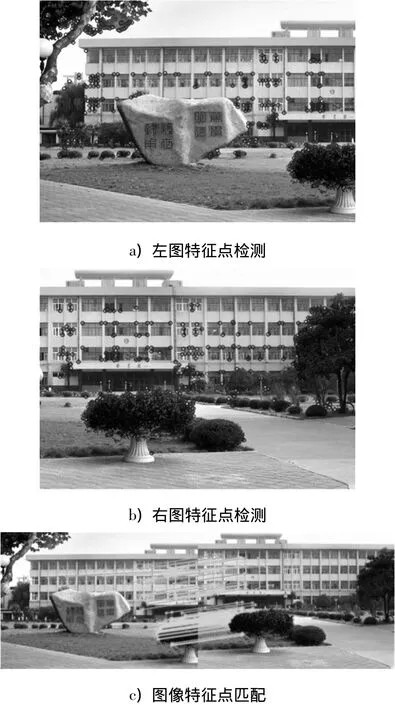
圖2 ORB算法粗匹配Fig.2 Coarse matching with ORB algorithm
2RANSAC算法改進
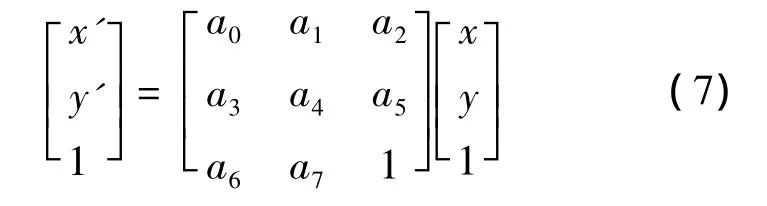
RANSAC算法是一種經典的消除誤匹配的方法,具有匹配精度高、可靠度高,魯棒性強[8]等優點.RANSAC算法需要用到單應矩陣H(Homography Matrix)[9],它描述了兩幅圖像點坐標之間的變換關系,即Ai′=HAi,可以進行圖像之間的平移、旋轉和縮放[10].H 變換如式(7)所示,其中(x,y),(x′,y′)表示待匹配特征點坐標.
用RANSAC算法剔除誤匹配的關鍵是求出單應矩陣H,在VS2010中對H的編程代碼如下:
CvMat*H;/*定義單應矩陣H*/
H=ransac_xform(feature1,n1,FEATURE_FWD_MATCH, lsq_homog,4,0.01,homog_xfer_err,3.0,&inliers,&n_inliers);/* 定義H的各項參數,其中inliers表示提純后的內點對數,n-inliers表示最終匹配點對個數*/
經典RANSAC算法[11]采用迭代法來估計H矩陣的 8 個參數(a0,a1,a2,…,a7),基本過程如下:
步驟1:將兩幅圖像進行粗匹配,獲得N個待匹配點對的集合,并進行坐標歸一化.即Ai′?Ai,其中 i=1,2,…,N.
步驟2:從N個待匹配點對中隨機選取4個點對,解出矩陣H的8個參數.
步驟3:計算其余(N-4)個特征點經過矩陣H變換得到的特征點與其他待匹配特征點之間的歐氏距離 d,d= ‖HA-A′‖.若 d < t(t為閾值[12]),則該待匹配特征點為內點,反之為外點.
步驟4:重復步驟2~3 k次,計下每一次的內點數量,其中k為迭代次數.
步驟5:選擇內點數最多的集合作為最終內點集合[13],與此相對應的H變換中的8個參數作為參數估計最優值.
實際發現,粗匹配檢測出的特征點對有一些偏差很大,如圖2 a)左部特征點對應于圖2 b)右部特征點,顯然不匹配,但經典RANSAC算法步驟還是把這些點帶入計算,使得算法速度慢、工作效率低,尤其在兩幅圖片特征點數量多的時候愈發明顯.于是文中對RANSAC算法進行一些改進,先采用空間一致性法[14],在算法過程中剔除明顯的錯誤匹配點,以縮小抽樣點總量,減少迭代次數.
空間一致性理論可以用圖3具體說明.相似的結構容易導致錯誤的匹配,圖3中檢測兩扇不同但相似的窗子,得出了12對彩色特征點,并用不同色彩表示不同值的特征點.如果考慮一下鄰域的彩點情況,如圖中考慮8點的鄰域(紅圓圈出),可以發現雖然8和8*特征相同,但鄰域內6和6*、9和9*、12和12*等特征不同,結果可以判定8和8*不匹配,這就是空間一致性理論的基本思想.
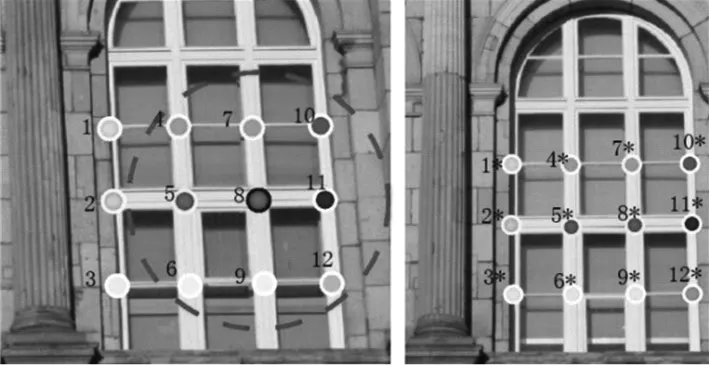
圖3 不同窗戶的相似特征點Fig.3 Similar feature points between different windows
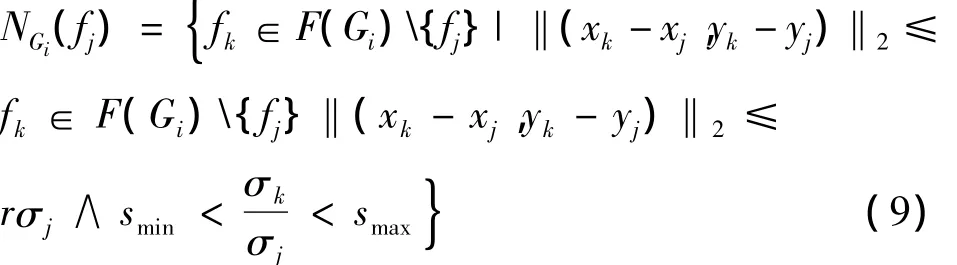
對兩幅圖進行空間一致性檢查,需要設圖像為Gi,定義尺寸不變特征函數:式中:(xj,yj)為特征點中心坐標;σj為尺度;dj為描述子.對于每一個特征 fj,定義其鄰域集合NGi(fi),其包含以(xj,yj)為圓心,rσj為半徑的圓的特征點,并且尺度大小在(sminσj,smaxσj)范圍.NGi(fi)集合表示如式(9)所示,式(9)中的∧表示取小運算.
設有一圖像對(G1,G2),通過各自的特征點描述子可以進行點匹配,形成匹配點集C:

然后定義一個匹配點集c=(f1j,f2k)∈C的鄰域集N(c):
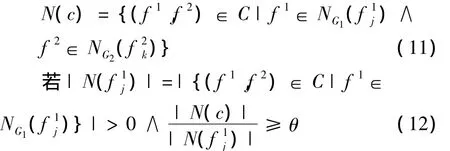
那么就說明匹配點集是符合空間一致性的,其中臨界值θ∈[0,1].這樣,就可以從匹配點集C剔除錯誤點,形成新點集Cnew,顯然Cnew?C.
改進RANSAC算法采用上述空間一致性檢測原理,其步驟如下:
步驟1:通過ORB算法檢測出粗匹配點,點集為C.
步驟2:采用空間一致性檢查點集C,得出新點集Cnew.新點集的數目
步驟3:采用經典RANSAC對N個匹配點進行迭代計算.設 k=0,εnew=m/N,I*=0,其中 k為迭代次數,m為Cnew中的隨機匹配點,εnew為Cnew局內點所占的比例.當η=(1-εmnew)k≥ η0時,計算圖像變換模型φ,算出局內點的數目I,若I>I*,則I*=I,εnew=I*/N,存儲 φ,直到 η < η0為止.
3 改進RANSAC實驗
為了驗證改進算法的實際效果,采用2組圖片進行匹配性試驗,并且統計運算結果.首先,運用改進RANSAC對圖2a),b)進行提純,精匹配效果如圖4 a),拼接結果如圖4 b)所示.
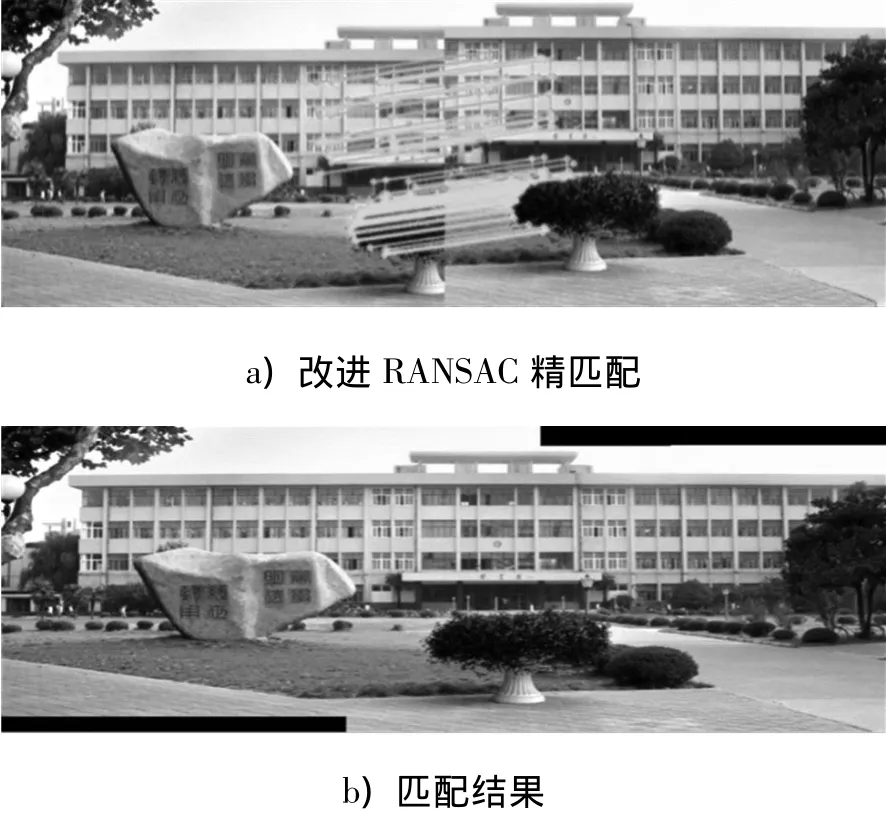
圖4 540×380像素圖片匹配Fig.4 Matching of 540 ×380 pixels′images
同樣,再用改進RANSAC算法對一組300×400像素圖片進行檢測.粗匹配和精匹配效果如圖5a),b)所示,拼接的效果如圖5 c)所示.
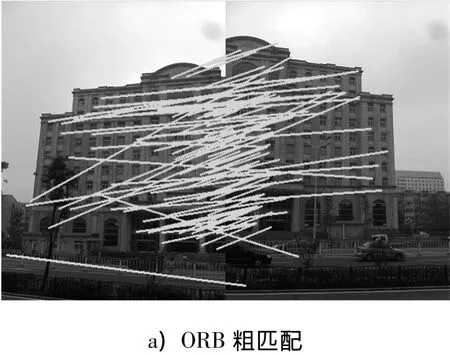
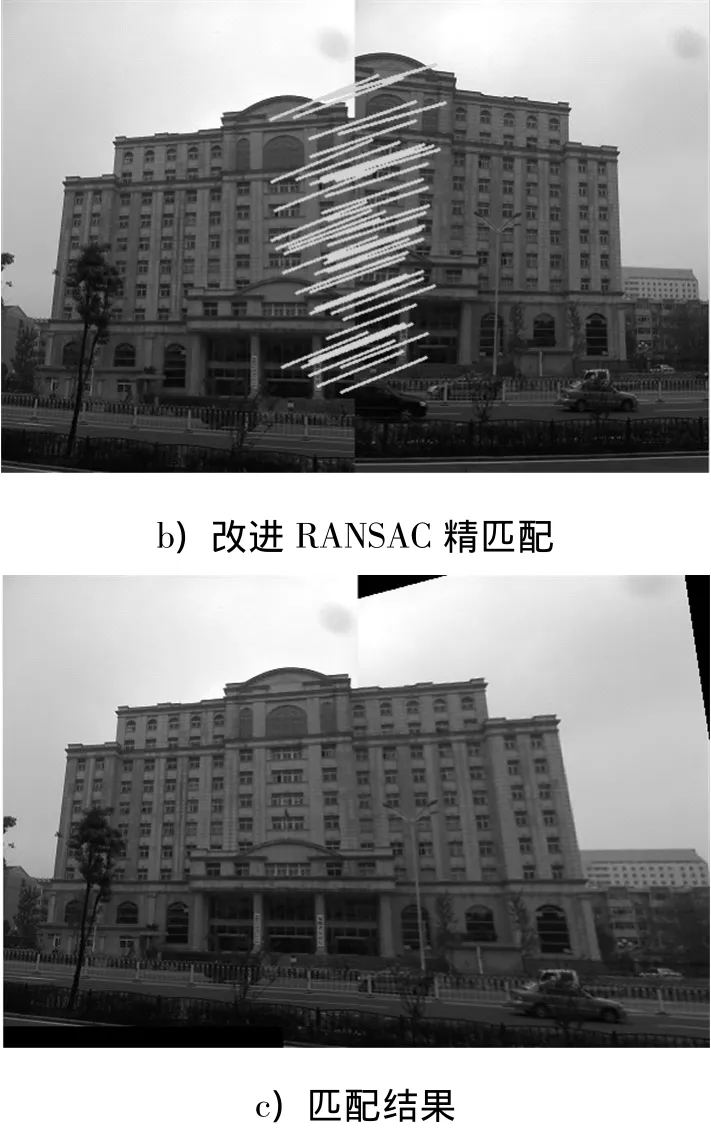
圖5 300×400像素圖片匹配Fig.5 Matching of 300 ×400 pixels′images
運用ORB和經典RANSAC對同樣的圖片進行匹配試驗,效果如圖6a),b)所示.為了統計提純時間,采用cvGetTickCount()、cvGetTickFrequency()函數的組合實現,其獲取時間的代碼片段如下:
int64 bt,et;∥定義整型變量計算時間
bt=cvGetTickCount();∥開始時間
……;∥寫入需要監測時間的RANSAC代碼
∥片段
et=cvGetTickCount();∥結束時間printf(“提純時間=%f Seconds ”,(et-bt)/
(double)cvGetTickFrequency()/1000000.0);
∥輸出時間
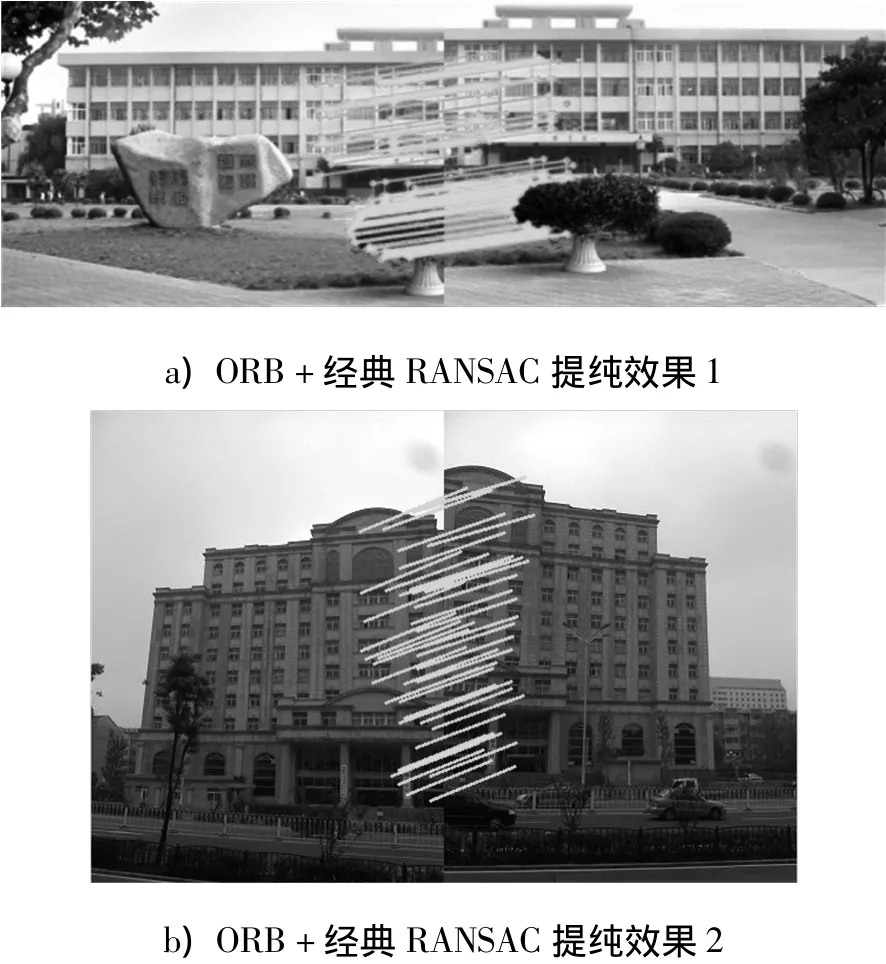
圖6 ORB+RANSAC對兩組圖片提純的效果Fig.6 ORB+RANSAC purifying effect on the two groups of images
采用matches.size()函數得出ORB粗匹配點對數,通過inliers++自增運算獲得提純后inliers內點對數.考慮到系統環境的變化性,對兩組圖片分別調試10次,算出平均內點對數、提純時間等參數.對實驗結果進行統計,結果如表1所示.由表可見,改進RANSAC算法的剔誤率和經典RANSAC相當,提純速度有所提高;該改進算法在兩幅圖片角度、亮度等差異較大的情況下提純速度提升較明顯.

表1 算法比較Table 1 Comparison of algorithms
4 結論
文中對ORB算法進行了研究,采用oFAST算子和rBRIEF描述子實現了圖像粗匹配.在結合前人研究的基礎上,將空間一致性理論運用在RANSAC算法中,對其進行了改進.采用兩組圖像進行了實驗,對該改進算法和經典RANSAC算法進行比較,算出了精匹配的內點對數、提純時間、剔誤率等評估參數.
實驗表明,改進RANSAC算法在保證匹配精度的條件下,提高了提純速度.而且ORB原本的運算速度就很快,據文獻[15-16]描述,其速度是SIFT的100倍,是 SURF的10倍.那么,ORB和改進RANSAC的結合,在進行圖像快速拼接,尤其在視頻幀圖像的快速拼接時,運用此算法可以達到良好的實時性,保證了實時拼接的流暢性.這對于圖像或者視頻實時拼接技術研究者有一定的借鑒作用.
References)
[1] 傅軍棟,姚孝明.實景圖像拼接及其漫游控制技術[M].成都:西南交通大學出版社,2011:1-20.
[2] 張云生,鄒崢嶸.基于改進ORB算法的遙感圖像自動配準方法[J].國土資源遙感,2013,25(3):20-24.Zhang Yunsheng,Zou Zhengrong.Automatic registration method for remote sensing images based on improved ORB algorithm [J].Remote Sensing for Land & Resources,2013,25(3):20-24.(in Chinese)
[3] 李小紅,謝成明,賈易臻,等.基于ORB特征的快速目標檢測算法[J].電子測量與儀器學報,2013,27(5):455-460.Li Xiaohong,Xie Chengming,Jia Yizhen,et al.Rapid moving object detection algorithm based on ORB features[J].Journal of Electronic Measurement and Instrument,2013,27(5):455-460.(in Chinese)
[4] Rosin P L.Measuring corner properties[J].Computer Vision and Image Understanding,1999,73(2):291-307.
[5] 黃征宇.用于ATM機遮擋人臉檢測的模糊級聯分類器和ORB算法的研究[D].長沙:中南大學,2013.
[6] 侯毅,周石琳,雷琳,等.基于ORB的快速完全仿射不變圖像匹配[J].計算機工程與科學,2014,36(2):303-310.Hou Yi,Zhou Shilin,Lei Lin,et al.Fast fully affine invariant image matching based on ORB[J].Computer Engineering & Science,2014,36(2):303-310.(in Chinese)
[7] 王小力.基于OpenCV和VC++的目標提取技術[J].硅谷,2010(15):164-165.Wang Xiaoli.Target extraction technology based on OpenCV and VC++[J].Silicon Valley,2010(15):164-165.(in Chinese)
[8] 田文,王宏遠,徐帆,等.RANSAC算法的自適應Tc,d預檢驗[J].中國圖象圖形學報,2009,14(5):973-977.Tian Wen,Wang Hongyuan,Xu Fan,et al.Enhanced RANSAC with adaptive Tc,dpre-verification [J].Journal of Image and Graphics,2009,14(5):973-977.(in Chinese)
[9] 宋衛艷.RANSAC算法及其在遙感圖像處理中的應用[D].河北保定:華北電力大學,2011.
[10] 孫強,葉玉堂,宋昀岑,等.基于優化RANSAC算法的二次元快速穩定配準[J].計算機工程與設計,2012,33(6):2373-2377.Sun Qiang,Ye Yutang,Song Yuncen,et al.Fast and stable method based on optimized RANSAC algorithm for two-dimensional image[J].China Computer Federation Magazine,2012,33(6):2373-2377.(in Chinese)
[11] 介軍,李智杰,姚鵬.改進的RANSAC匹配點提純算法[J].西安建筑科技大學學報:自然科學版,2013,45(6):896-901.Jie Jun,Li Zhijie,Yao Peng.Improved RANSAC algorithm of matched points purifying [J].Journal of Xi′an University of Architecture&Technology:Natural Science Edition,2013,45(6):896-901.(in Chinese)
[12] 馬麗濤,楊丹,張小洪,等.一種新的基于條件數的圖像配準算法[J].中國圖象圖形學報,2008,13(2):278-283.Ma Litao,Yang Dan,Zhang Xiaohong,et al.A new method for image registration based on condition number[J].Journal of Image and Graphics,2008,13(2):278-283.(in Chinese)
[13] 黃有群,付裕,馬廣.基于RANSAC算法的柱面全景圖拼接方法[J].沈陽工業大學學報,2008,30(4):461-465.Huang Youqun,Fu Yu,Ma Guang.Cylindrical panoramic image stitching method based on RANSAC algorithm[J].Journal of Shenyang University of Technology,2008,30(4):461-465.(in Chinese)
[14] Sattler T,Leibe B,Kobbelt L.SCRAMSAC:improving RANSAC′s efficiency with a spatial consistency filter[C]∥Proceedings of the IEEE International Conference on Computer Vision.Piscataway:IEEE,2009:2090-2097.
[15] 謝成明.基于ORB特征的目標檢測與跟蹤的研究[D].合肥:合肥工業大學,2013.
[16] Rublee E,Rabaud V,Konolige K,et al.ORB:an efficient alternative to SIFT or SURF[C]∥Proceedings of the IEEE International Conference on Computer Vision.Piscataway:IEEE,2011:2564-2571.
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54