三維成像激光雷達的隱偽目標探測技術*1
2015-03-09 08:17:22史要濤,趙文,于臨昕等
現代防御技術 2015年5期
?
三維成像激光雷達的隱偽目標探測技術*1
史要濤1,趙文1,于臨昕1,張燕1,柯才軍1,王曉劍2
(1.湖北航天技術研究院 總體設計所,湖北 武漢430034; 2.北京信息高技術研究所,北京100085)
摘要:復雜戰場環境下有效探測地面隱偽目標是提高導彈作戰效能的關鍵。針對現有APD陣列大小受限問題,提出了一種利用高空間分辨率的二維焦平面陣列和低空間分辨率的APD陣列進行聯合探測技術,仿真實驗結果表明,該技術可以實現高分辨率的三維成像,為現有的基于高分辨三維激光雷達的隱偽目標探測技術提供了一種可行性方案。
關鍵詞:三維成像;激光雷達;隱偽目標;高分辨;期望最大化
0引言
復雜戰場環境下,如何探測和識別地面隱偽目標是提高彈道導彈作戰效能的關鍵[1-3]。戰術導彈在打擊受隱藏、偽裝、干擾等影響的目標時,現有末制導手段難以有效分離識別目標,無法對有價值目標實現精確打擊,其本質原因是現有末制導手段采用的是二維成像探測體制。然而二維成像只能探測空間域的強度信息,無法對隱藏和偽裝目標進行有效識別。新斗爭形勢亟需提高對打擊目標的精確三維探測能力,進一步提升戰術導彈末制導系統的精確辨識能力和抗干擾突防能力。
由于受到彈載高速平臺的限制,解決上述問題一般可采用成像速度快、分辨率高的大面陣APD陣列探測器[4-6]。而此類探測器受限于集成電路工藝的限制,國內無此類器件,且國外限制進口,無法獲得。如何利用小面陣APD陣列獲得高分辨率的三維圖像,在現階段具有實際意義。本文針對小面陣APD陣列三維成像問題,提出了一種利用高空間分辨率的二維焦平面陣列和低空間分辨率的APD陣列進行聯合探測技術,分析了聯合探測成像激光雷達回波信號模型,提出了一種基于期望最大值算法(expectation maximization,EM)的二維和三維關聯算法。仿真實驗結果表明,該技術可以實現高分辨率的三維成像,為現有的基于高分辨三維激光雷達的隱偽目標探測技術提供了一種可行性方案。
1三維非掃描激光雷達/二維焦平面陣列聯合探測原理
三維非掃描激光雷達/二維焦平面陣列聯合探測原理如圖1所示。
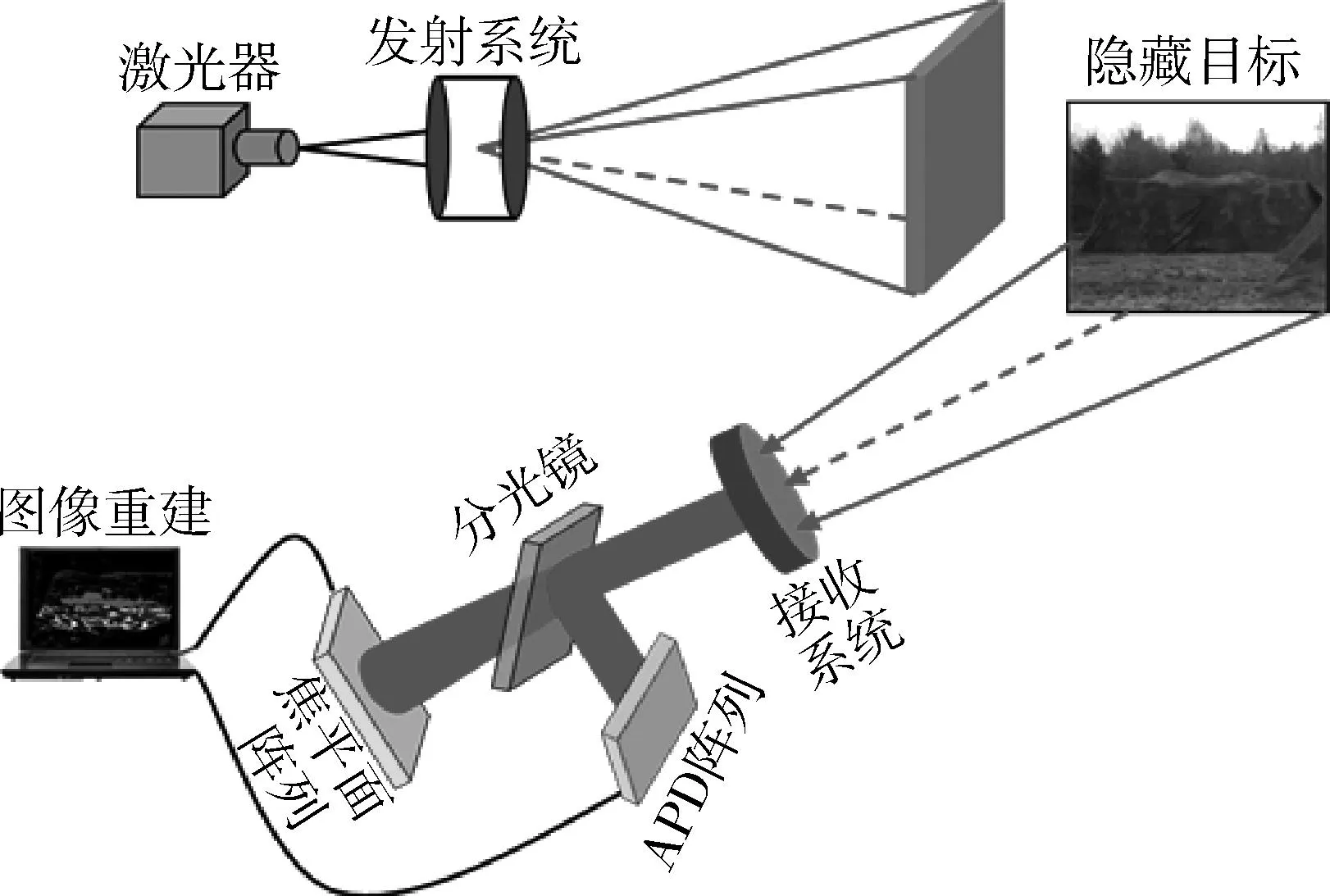
圖1 三維非掃描激光雷達/二維焦平面陣列聯合 探測原理示意圖Fig.1 Schematic of 3D flash lidar/2D focal plane array joint detection
脈沖激光經發射光學系統準直、整形和擴束后照射到目標場景上,接收光學系統收集目標回波信號,分別投射到接收端的APD陣列和焦平面陣列上,讀出集成電路(read out integrated circuit,ROIC)對APD陣列中每一個像元的數據進行并行處理,每個像元單獨測量激光脈沖的往返時間、目標方位、目標強度信息,從而得到低分辨率目標的三維圖像。二維焦平面陣列對選通門范圍內的目標成高空間分辨率的強度像,數據處理單元對距離像和強度像進行關聯解算,從而得到高分辨率的三維圖像。高分辨三維圖像形成思路如圖2所示。
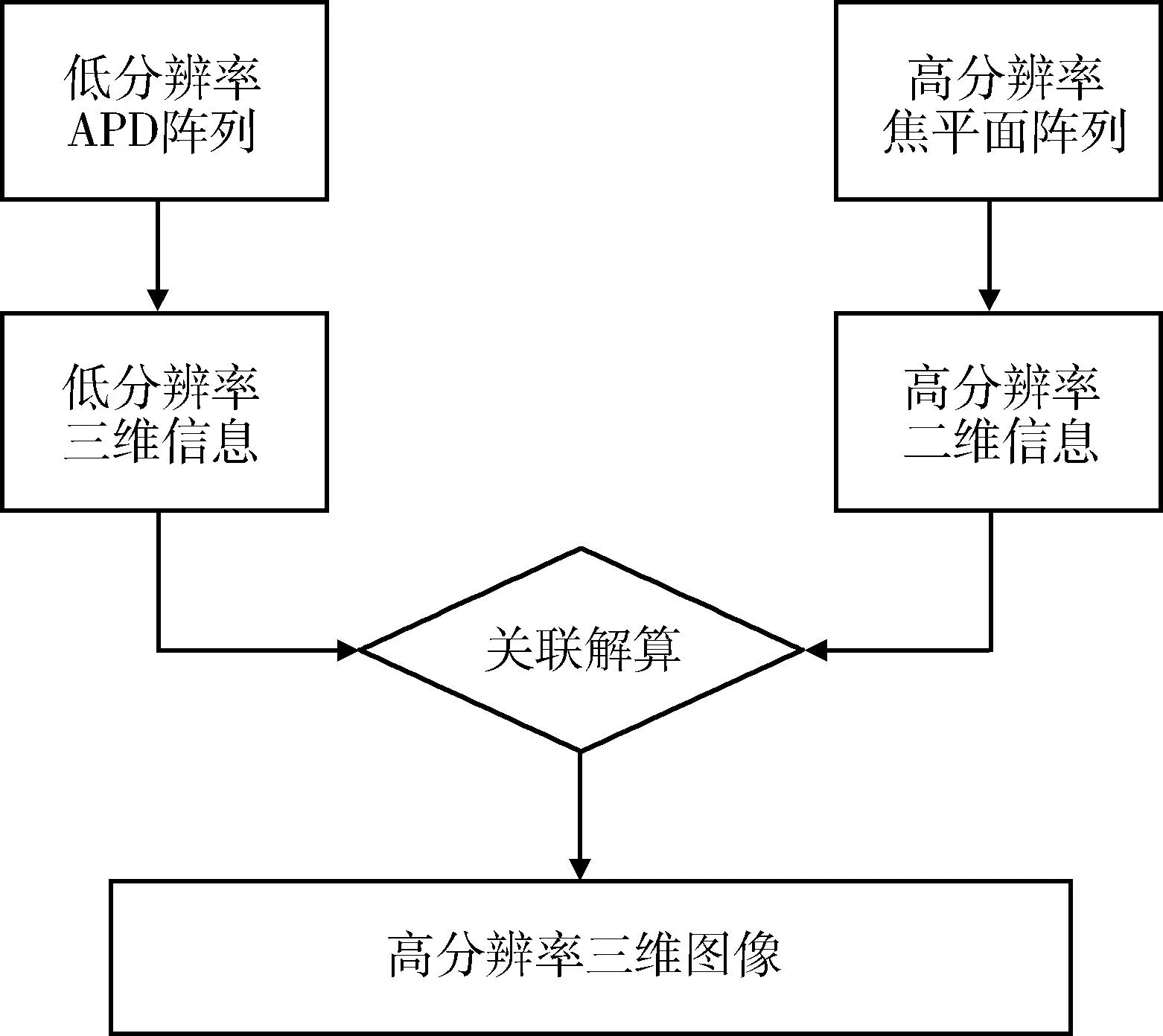
圖2 高分辨三維圖像形成思路圖Fig.2 High resolution 3D image formation diagram
典型的基于APD陣列的三維非掃描激光雷達主要有2種工作模式[7-10],第1種模式是觸發模式,即探測陣列的每個像素通過設定閾值單獨觸發,這種模式受回波波形的干擾較大,但不需預先知道目標距離范圍;第2種模式是采樣模式,即所有像素在距離門范圍內對回波信號進行同時采樣(即全波形測距),這種模式可以連續地捕獲目標和背景的細節信息,但需要預先知道目標距離范圍,在實際的三維非掃描激光雷達成像應用時,可以先采用觸發模式探測到目標的大致距離范圍,然后利用采樣模式跟蹤和確認目標[11]。
2二維和三維聯合探測回波信號模型構建
本文是通過將高空間分辨率的二維強度圖像與低空間分辨率三維圖像數據融合的方法,實現高分辨率三維成像。因此在回波信號建模時,涉及到二維焦平面陣列強度圖像數據和三維回波脈沖數據2個模型。
二維焦平面陣列強度圖像數據:
在距離門范圍內,目標回波脈沖的強度信息A(x,y)通過二維焦平面陣列成像系統獲得,采用Lucy-Richardson反卷積算法[12-13]估計目標各像素點的強度,即
(1)
式中:(m,n)為二維焦平面陣列探測器坐標;(x,y)為目標平面坐標;N×N為二維焦平面探測器陣列大小;d(m,n)為退化圖像。
三維回波脈沖數據模型:
在激光主動探測領域中,回波信號主要采用高斯模型,則基于APD陣列探測的三維非掃描激光雷達回波信號脈沖為
ο(x,y,rk)=A(x,y)p(x,y,rk),
(2)
式中:

(3)
式中:A(x,y)為距離為r(x,y)的目標回波信號強度;p(x,y,rk)為距離為r(x,y)的回波信號波形;σpd為高斯脈沖寬度的標準偏差;rk代表三維非掃描成像激光雷達的距離采樣能力。
探測器在采樣間隔內探測的信號光子和噪聲光子都近似服從泊松分布。則APD 陣列探測器接收光子數的聯合概率密度分布函數(probability density function,PDF)為
P[D(z,w,rk)=d(z,w,rk);?z,w,k]=

(4)
式中:
B(z,w),
(5)
式中:(z,w)為APD陣列探測器坐標;K為欠采樣因子[9];M×M為APD探測器陣列大小。
3二維和三維關聯解算算法
本文采用EM算法進行二維和三維的關聯解算,主要分2步完成:E 步驟:構建完備數據和不完備數據,并建立完備數據和不完備數據之間的統計關系,尋找完備數據對數似然函數的期望值;M步驟:迭代最大化完備數據對數似然函數期望值,得到脈沖和噪聲的迭代關系式。最后利用構建的采樣數較多的脈沖與采集的脈沖進行互相關運算,得到目標的距離信息。
通過EM算法推導得到脈沖和噪聲的迭代關系式為

(6)
式中:

(7)

(8)
迭代停止條件:


(9)
算法步驟如下所示:
(1) 初始化A(x,y)和B(z,w);
(2) 初始化距離r(x,y),從而得到初始化脈沖p(x,y,rk);
(3) 通過式(1)得到目標強度信息A(x,y);
(4) 通過式(6)和(8)進行迭代,直到滿足迭代停止條件式(9),估計出p(x,y,rk)和B(z,w);
(5) 通過歸一化互相關距離估計方法得到目標的距離估計r(x,y)。
4仿真實驗結果與分析
為驗證本文提出的二維和三維聯合探測技術的可行性,對典型的飛機目標進行了仿真實驗驗證,假定目標位于系統正前方且目標為朗伯反射體,仿真參數如表1所示。
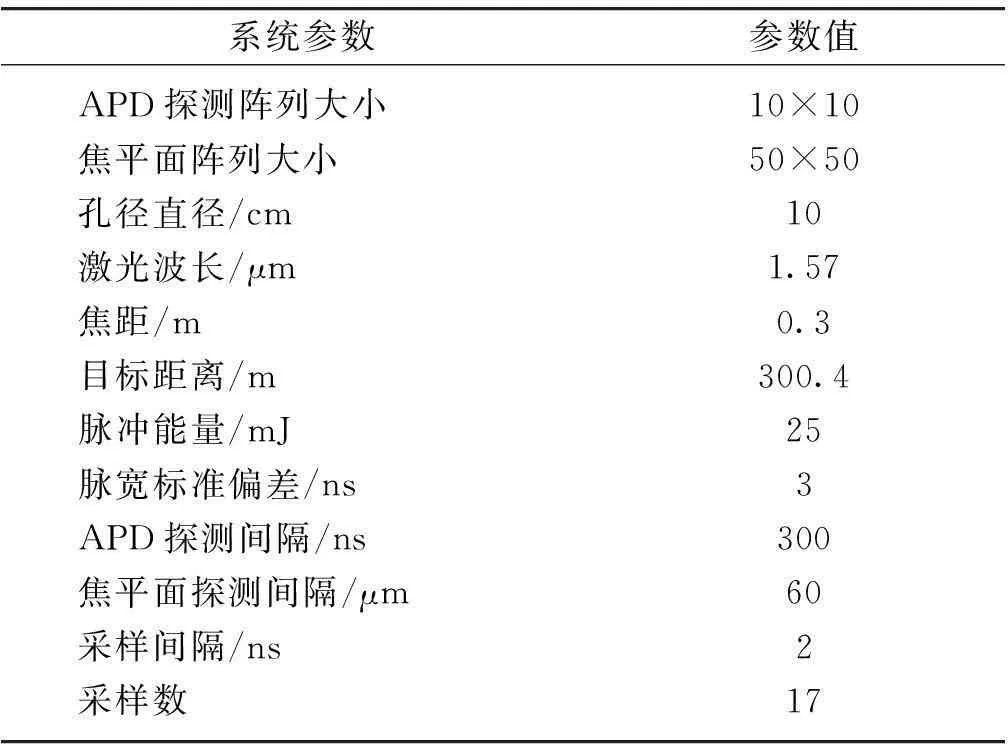
表1 三維非掃描激光雷達/二維焦平面成像仿真參數
由表1可知,APD陣列大小為10×10,焦平面探測器陣列大小為50×50,則欠采樣因子K=5,圖3分別給出了2種不同目標的原始三維像和小面陣APD陣列得到的三維像。
圖3a)為典型的飛機目標,距離成像系統最近的點的距離為300.4 m,圖3b)為典型飛機目標的低空間分辨率三維圖像。由圖3可以看出,小面陣APD陣列成像會導致目標信息的大量丟失。
圖4給出了通過傳統的鄰近插值、線性插值、雙三次插值[14-15]和本文提出的關聯解算算法得到的目標三維圖像。
從圖4可以看出,采用傳統的插值算法時,目標的距離信息丟失嚴重。一些目標的特征信息在使用傳統的插值算法時得不到復原,采用領近、線性和雙三次插值算法時,飛機的機頭和機尾的細節信息基本丟失,這會對后期的距離像的目標識別帶來嚴重影響。本文提出的關聯解算方法對二維和三維聯合成像的三維像重建精度有明顯的提升作用,圖4中的飛機在采用了EM 算法進行復原后,機頭和機尾的細節信息得以顯示,對后期的目標識別有很重要的參考價值。
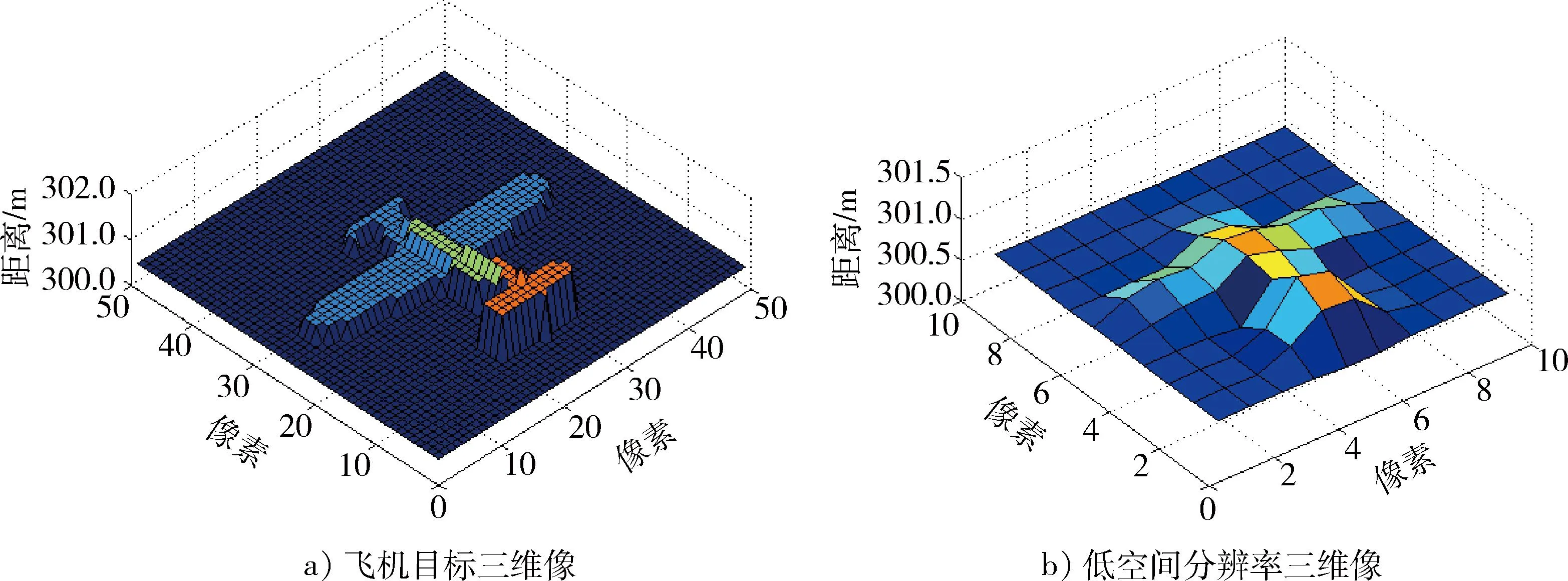
圖3 典型飛機目標三維像及小面陣APD陣列三維像Fig.3 3D image of plane and low resolution 3D image
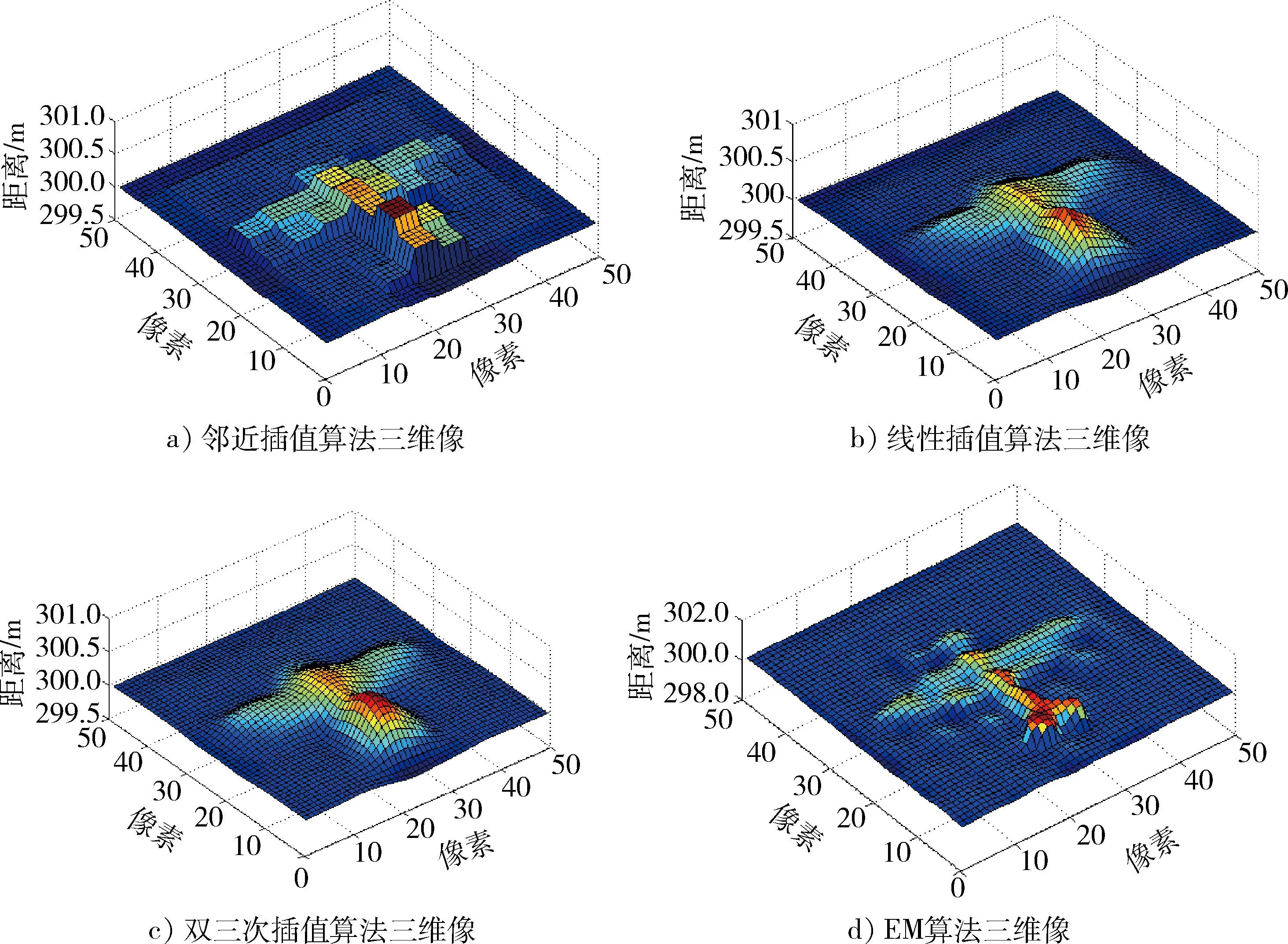
圖4 不同算法的典型飛機目標三維像Fig.4 3D image of plane with different algorithms
5結束語
本文針對復雜戰場環境下的隱偽目標探測問題,提出了一種基于小面陣APD陣列和大面陣焦平面陣列聯合探測的體制,分析了聯合探測體制的回波信號模型,提出了一種基于EM的二維和三維的關聯解算方法,通過仿真驗證了該聯合成像探測體制的可行性。下一步,擬對以下關鍵技術進行攻關:隱偽目標激光探測系統設計技術;二維和三維圖像融合技術;高效快速高分辨三維圖像重構技術;三維圖像實時顯示和處理技術;高分辨二維和低分辨三維聯合探測系統設計技術;系統集成與測試技術。
參考文獻:
[1]高穎慧,王平,李君龍,等. 復雜戰場環境下的防空反導光學成像制導技術[J]. 現代防御技術,2012,40(1):8-10.
GAO Ying-hui, WANG Ping, LI Jun-long, et al. Optical Imaging Guidance Technology in Complicated Battlefield Environment[J]. Modern Defense Technology 2012,40(1):8-10.
[2]原慧,陶建峰,安磊. 復雜戰場環境雷達探測模型研究[J]. 計算機測量與控制,2012,20(11):2999-3004.
YUAN Hui, TAO Jian-feng, AN Lei. Research of Radar Detection Model Under Complex Battle Environments[J]. Computer Measurement & Control. 2012,20(11):2999-3004.
[3]吳劍,代冀陽,周繼強,等. 復雜戰場環境下的隱身航路規劃主動規避技術[J]. 彈箭與制導學報,2011,31(4):173-176.
WU Jian, DAI Ji-yang, ZHOU Ji-qiang,et al. Active Avoidance Technique by Stealth Course Planning in Complicate Battlefield Environment[J]. Journal of Projectiles,Rockets,Missiles and Guidance, 2011,31(4):173-176.
[4]DRIES J, MILES B, STETTNER R. A 32x32 Pixel Flash Laser Radar System Incorporating InGaAs Pin and Apd Detectors[C]∥Laser Radar Technology and Applications IX,2004.Orlando,FL,United states:SPIE,2004,5412:250-256.
[5]Busck Jens, Henning Heiselberg. High Accuracy 3-D laser radar[C]∥Proceedings of SPIE, 5412:257-263, 2004.
[6]DRIES J, MARTIN T, HUANG W, et al. In GaAs/InP Avalanche Photodiodes Arrays for Eye Safe Threedimensional Imaging[C]∥Proceedings of SPIE.SPIE,2003, 5074:11-17.
[7]Steven Johnson, Stephen Cain. Bound on Range Precision for Shot-Noise Limited Ladar System [J].Applied Optics, 2008, 47(28):5147-5154.
[8]Stephen Cain, Richard Richmond. Flash light Detection and Ranging Range Accuracy Limits for Returns from Single Opaque Surfaces via Cramer-Rao Bounds [J]. Applied Optics, 2006, 45(24):6154-6162.
[9]Stephen Cain. Bayesian-Based Fusion of 2-D and 3-D LADAR Imagery [C]∥IEEE Aerospace Conf, 2009, 19: 223-227.
[10]McMahon, MARTIN R,CAIN S C.Three-Dimensional FLASH Laser Radar Range Estimation via Blind Deconvolution[J]. J.Appl.Remote Sens, 2010,15(4):332-339.
[11]Cho Peter, Hyrum Anderson, Robert Hatch,et al. Real-Time 3D Ladar Imaging[C]∥Laser Radar Technology and Application,US:Proc. of SPIE, 2006, 6325-6329.
[12]FISH D A, BRINICOMBE A M. Blind Deconvolution by Means of the Richardson-Lucy Algorithm [J]. Optical Society of America,1995,21(12):11-15.
[13]Mahalanobis, Abhijit,Alan J Van Nevel. Performance of Multi-Dimensional Algorithms for Target Detection in LADAR Imagery[C]∥Laser Radar Technology and Application,US:Proc. of SPIE, 2002: 4789-4794.
[14]Rafael C Gonzalez, Richard E Woods. Digital Image Processing [M].Colifornia:John Wiley,2007
[15]Richmond Richard, Stephen Cain. Direct-Detection LADAR Systems[C]∥SPIE Publications, Washington, USA, 2010:54-64.
Camouflage Target Detection via 3D Flash Imaging Lidar
SHI Yao-tao1, ZHAO Wen1, YU lin-xin1, ZHANG Yan1, KE Cai-jun1, WANG Xiao-jian2
(1.System Design Institute of Hubei Aerospace Technology Academy,Hubei Wuhan 430034,China;2.Beijing Information High Technology Institute, Beijing 100085,China)
Abstract:The camouflage target detection technology has played an important role in improving missile effectiveness in complicated battlefield environment. Aiming at the problem of limited size of APD array, a technology using high spatial resolution 2D focal plane array and low spatial resolution 3D APD array for joint detection technology is proposed. Simulation examples show that this technology can achieve high resolution 3D imaging, providing a feasible scheme for existing camouflage target detection technology.
Key words:three dimensional imaging; lidar; camouflage target;high resolution;expectation maximization
中圖分類號:TN958.98;TJ76;TP391.9
文獻標志碼:A
文章編號:1009-086X(2015)-05-0007-05
doi:10.3969/j.issn.1009-086x.2015.05.002
通信地址:430034湖北武漢東西湖區金山大道九號中國航天三江集團E-mail:Sythn2002@163.com
作者簡介:史要濤(1983-),男,河南登封人。高工,博士,主要研究方向為新型光電探測技術。
基金項目:有
*收稿日期:2014-10-10;修回日期:2015-02-06