基于開環(huán)穿越頻率的偽攻角反饋駕駛儀設(shè)計
2015-03-10 10:34:52張亞婷
航天控制 2015年3期
張亞婷 王 偉
北京航天自動控制研究所,北京100854
近年來,三回路自動駕駛儀結(jié)構(gòu)應(yīng)用廣泛[1],其具有良好的系統(tǒng)穩(wěn)定性、快速性和魯棒性[2]。在三回路駕駛儀的設(shè)計中,系統(tǒng)期望閉環(huán)極點由時間常數(shù)、阻尼系數(shù)和自振頻率共同決定,如果能直接提出系統(tǒng)閉環(huán)自振頻率指標,則可利用經(jīng)典極點配置的方法,求解設(shè)計參數(shù)[3]。但一般情況下,自振頻率的提出需要大量的工程經(jīng)驗,往往很難準確獲得;同時由于舵機、加速度計和角速率陀螺等硬件及濾波器等部件的動態(tài)特性,對系統(tǒng)穩(wěn)定性的影響無法忽略,設(shè)計中需要在各硬件對應(yīng)頻率處對相位進行有效補償。因此,對系統(tǒng)開環(huán)穿越頻率的研究更有工程價值[4]。
本文首先介紹一種新結(jié)構(gòu)的三回路自動駕駛儀,即偽攻角反饋過載駕駛儀[5],在此基礎(chǔ)上,分析考慮開環(huán)穿越頻率約束的極點配置設(shè)計方法,并進一步考慮伺服特性,在引入附加極點的情況下,將系統(tǒng)開環(huán)穿越頻率設(shè)計至期望值附近。
1 偽攻角反饋過載駕駛儀
偽攻角反饋過載駕駛儀有2種構(gòu)造方式,分別以加速度信息和姿態(tài)角速率信息計算偽攻角。從數(shù)學方面分析,2種構(gòu)造方式完全等價;從工程實現(xiàn)方面,一種利用了加速度計的測量信號,一種利用了角速率陀螺的測量信號,2種方式都沒有增加對硬件資源的要求[6]。圖1所示為一種以姿態(tài)角速率信息獲得偽攻角的駕駛儀結(jié)構(gòu)框圖(其中kg,ωi,ka為各回路反饋系數(shù),GACT,Ggz,GAC分別表示伺服機構(gòu)、速率陀螺和加速度計)。
與典型結(jié)構(gòu)三回路駕駛儀相比較,偽攻角反饋過載駕駛儀同樣由阻尼回路、增穩(wěn)回路、過載回路構(gòu)成。但偽攻角反饋過載駕駛儀的增穩(wěn)回路信號不再是過載信息與姿態(tài)角速度信息差的積分,而是過載積分后與計算得到的偽攻角之差。理論上,偽攻角反饋在加速度計硬件性能較高的情況下,控制能力更好。
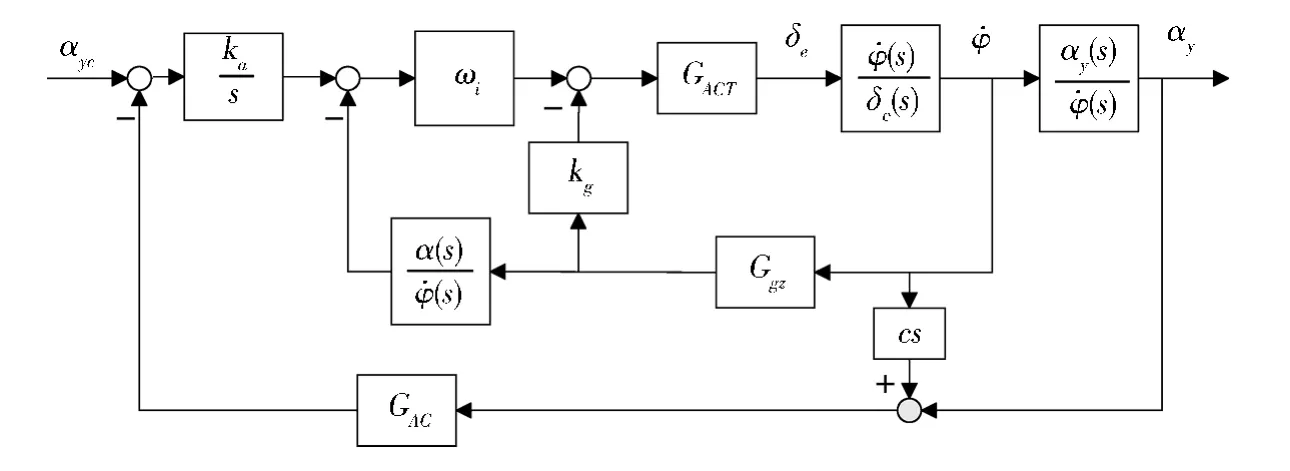
圖1 偽攻角反饋過載駕駛儀結(jié)構(gòu)圖
2 開環(huán)穿越頻率約束的極點配置設(shè)計
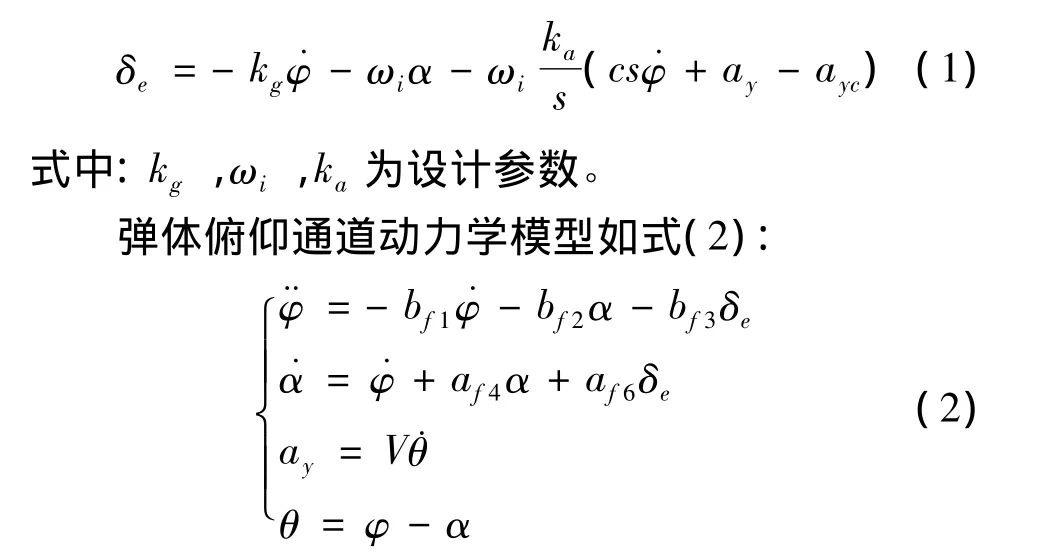
不考慮舵機、加速度計、角速率陀螺等硬件以及濾波器動態(tài)特性的影響,并假設(shè)GACT=Ggz=GAC=1,將駕駛儀在舵機處斷開,各回路反饋等效到δe處,得到:
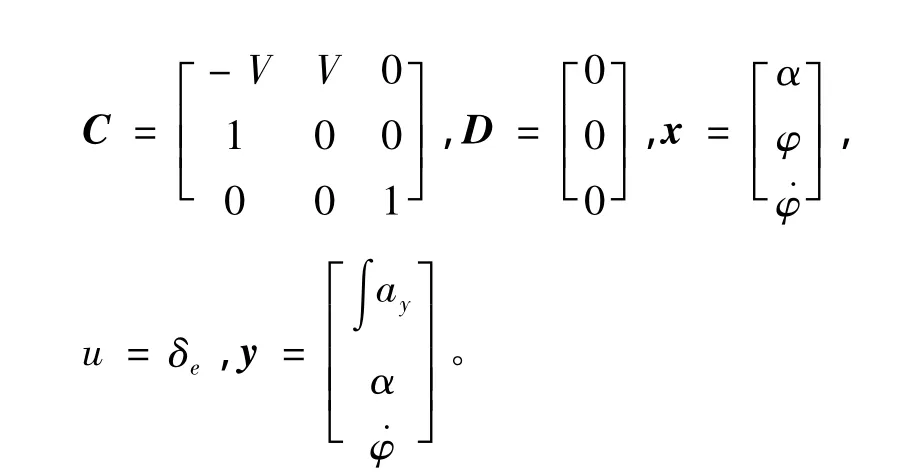
分析偽攻角反饋過載駕駛儀結(jié)構(gòu)框圖(圖1),顯然,駕駛儀為輸出反饋形式,則系統(tǒng)狀態(tài)空間方程描述為:

偽攻角反饋過載駕駛儀為三階系統(tǒng),理論上,由時間常數(shù)τ、阻尼μ與自振頻率ωn決定其動態(tài)性能,但實際工程中,開環(huán)穿越頻率ωc較自振頻率ωn更有價值,并更易獲得。因此使用τ,μ和ωc作為駕駛儀設(shè)計指標。
系統(tǒng)滿足一定的條件時,輸出反饋與狀態(tài)反饋之間可以相互轉(zhuǎn)化[6]。具體地,不妨令:u=-Kx+r,u=-Fy+r分別為狀態(tài)反饋、輸出反饋的控制方程,則當C-1,(I-KC-1D)-1均存在時,有如下關(guān)系:

結(jié)合圖1分析可知,極點配置設(shè)計后系統(tǒng)開環(huán)傳遞函數(shù)描述為:

獲得系統(tǒng)開環(huán)傳遞函數(shù)后,即可計算ωc。
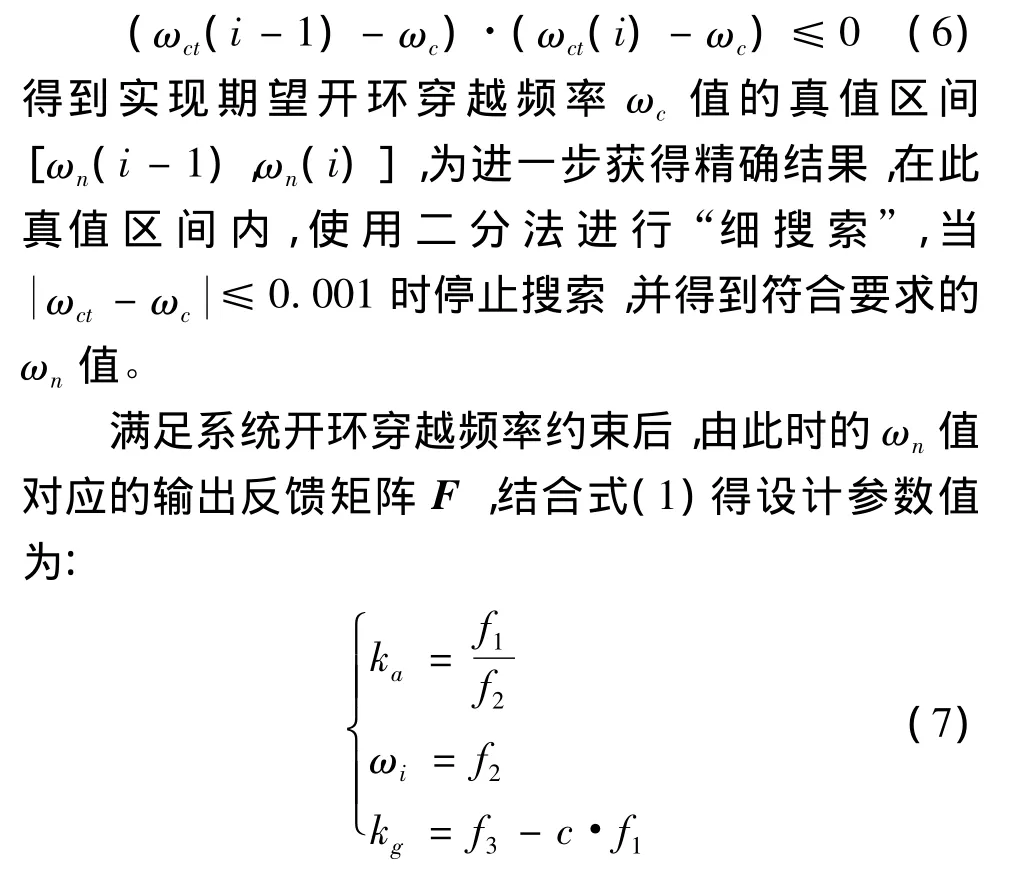
基于開環(huán)穿越頻率約束的極點配置是一個循環(huán)設(shè)計的過程。由于一組確定的τ,μ和ωn經(jīng)過極點配置后,對應(yīng)一個系統(tǒng)開環(huán)穿越頻率ωct,即ωct=f(ωn),并且f(ωn)是連續(xù)的。因此,實際設(shè)計中,使用“連續(xù)搜索法”:給定一系列連續(xù)的ωn,在每一個值點,計算閉環(huán)期望極點,使用matlab中的place命令,求出狀態(tài)反饋矩陣K,結(jié)合式(4)和(5)計算ωct,取“粗搜索”指標為:
3 考慮伺服特性設(shè)計駕駛儀
上述設(shè)計中,沒有考慮伺服機構(gòu)的動態(tài)特性,因此得到的實際系統(tǒng)性能與設(shè)計指標存在一定的偏差。理論上,伺服機構(gòu)的動力學越快,性能指標偏差越小,但伺服機構(gòu)頻帶有限,特別是當舵機頻率較低時,對駕駛儀極點有較大的影響。因此,需要在設(shè)計中考慮伺服特性,引入舵機狀態(tài)反饋約束,將系統(tǒng)極點配置到設(shè)計指標期望的位置。
舵機的動態(tài)特性,一般用二階模型描述,如式(8):
對于已選定的舵機,輸出反饋矩陣F中僅有3個反饋系數(shù)與設(shè)計參數(shù)相關(guān),f4和f5則根據(jù)舵機的特性參數(shù)直接確定,為2個確定值,從而限制了系統(tǒng)極點的取值,引入了額外的約束條件。因此設(shè)計中,使用“根平面搜索法”,即使用優(yōu)化方法搜索根平面,找到一對共軛根,使得這對根與另外3個系統(tǒng)主根按照極點配置方法計算得到的反饋系數(shù)與由舵機特性計算得到的f4和f5一致。搜索到系統(tǒng)期望閉環(huán)極點后,按照上節(jié)的設(shè)計方法,進行開環(huán)穿越頻率約束的駕駛儀設(shè)計。
4 實例分析
某導彈的彈體氣動參數(shù)如表1所示。取駕駛儀設(shè)計指標為:τ=0.3s,μ=0.7,ωc=15rad/s;舵機參數(shù)為:μsf=0.7,ωsf=200rad/s。
不考慮駕駛儀伺服特性,按照式(3)描述系統(tǒng),容易證明系統(tǒng)可控,可在根平面內(nèi)對極點進行任意配置。令駕駛儀自振頻率為ωn=[0.001:0.1:50]rad/s,結(jié)合性能指標τ和μ,搜索得到ωn=6.9229rad/s。此時系統(tǒng)開環(huán)穿越頻率為ωc=15.0006rad/s,配置的系統(tǒng)極點為-3.33,-4.846±4.944i,最終設(shè)計結(jié)果見表2。
考慮舵機動態(tài)性能時,駕駛儀的狀態(tài)空間方程描述為5階形式,使用優(yōu)化方法,進行“根平面搜索”,得到滿足f4=1,f5=0.007的極點為:-3.33,-5.3688±5.4773i,-151.19±113.45i。同時搜索系統(tǒng)開環(huán)穿越頻率,當自振頻率ωn=7.6698rad/s時,ωc=14.9998rad/s,設(shè)計結(jié)果見表2,開環(huán)幅頻特性曲線對比如圖2所示。
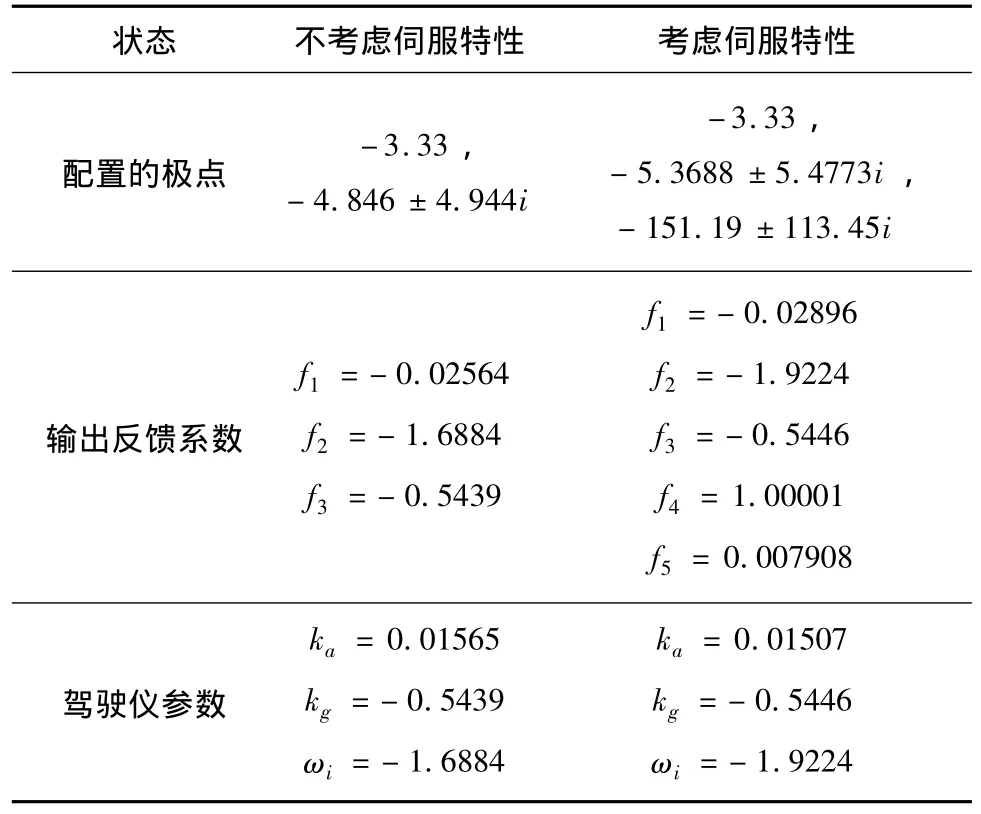
表2 設(shè)計結(jié)果表

圖2 開環(huán)幅頻特性曲線
駕駛儀參考輸入ayc為階躍時的響應(yīng)曲線如圖3所示,輸出過載信號ay產(chǎn)生一個較小的負向過載,作用給彈體后,角速度相應(yīng)增加(如圖4所示),并使彈體有一個較小的正攻角(如圖5所示),從而由氣動力產(chǎn)生正過載干擾,作用于過渡過程。過渡過程結(jié)束后,ay跟蹤參考輸入。
5 結(jié)論
將傳統(tǒng)三回路駕駛儀結(jié)構(gòu)中的角速度直接積分,用一個慣性環(huán)節(jié)代替,即為偽攻角反饋三回路駕駛儀,其采用輸出反饋形式,可以在狀態(tài)空間模型的基礎(chǔ)上進行極點配置。為了對偽攻角反饋過載駕駛儀的開環(huán)穿越頻率進行約束,本文使用連續(xù)搜索法進行閉環(huán)極點配置,同時,考慮到伺服特性對系統(tǒng)的影響,使用優(yōu)化方法搜索根平面,在引入附加約束條件的基礎(chǔ)上,配置系統(tǒng)極點滿足設(shè)計要求。通過仿真驗證,偽攻角反饋過載駕駛儀開環(huán)穿越頻率約束的極點配置算法,能夠滿足工程要求,具有一定的應(yīng)用前景。
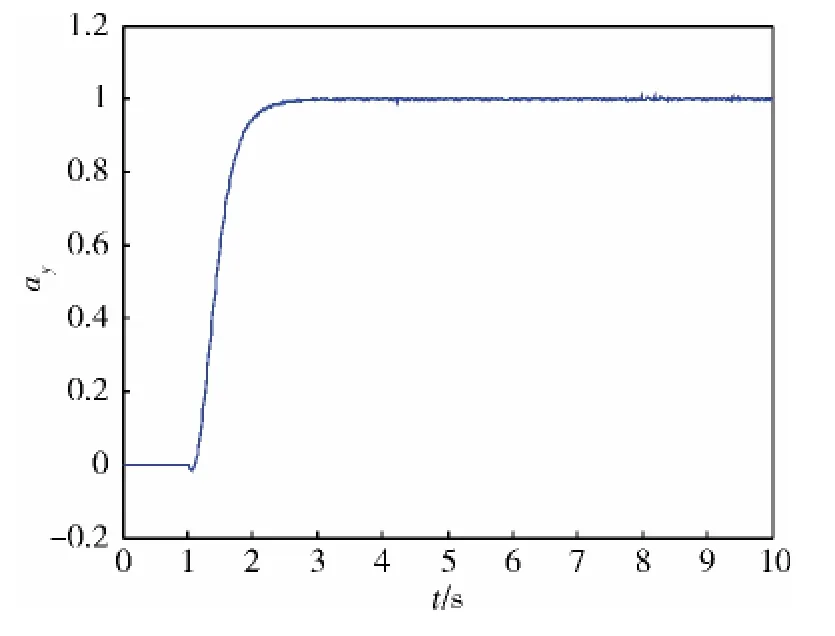
圖3 駕駛儀階躍響應(yīng)曲線
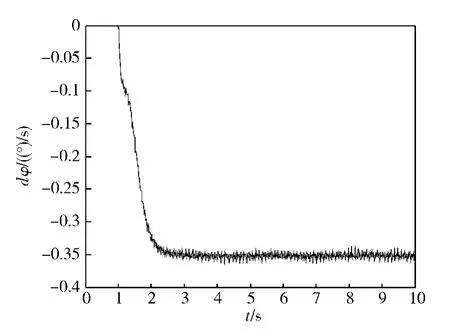
圖4 角速度響應(yīng)曲線
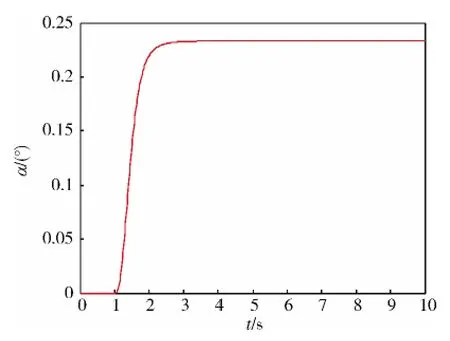
圖5 攻角響應(yīng)曲線
[1] Wise K A.A Trade Study on Missile Auto-pilot Design Using Optimal Control Theory[C]//Proc.of the AIAA Guidance,Navigation,and Control Conference and Exihibit,2005:698-727.
[2] Mracek C P,Ridgely D B.Optimal Control Solution for Dual(tail and canard)Controlled Missiles[C]//Proc.of the AIAA Guidance,Navigation,and Control Conference and Exihibit,2006:1-28.
[3] 朱敬舉,祁載康,夏群力.三回路駕駛儀的極點配置方法設(shè)計[J].彈箭與制導學報,2007,27(4):8-12.(Zhu Jingju,Qi Zaikang,Xia Qunli.Pole Assignment Method for Three-loop Autopilot Design[J].Journal of Projectiles,Rockets,Missiles and Guidance,2007,27(4):8-12.)
[4] 溫求遒,夏群力,祁載康.三回路駕駛儀穿越頻率約束極點配置設(shè)計[J].系統(tǒng)工程與電子技術(shù),2009,31(2):420-423.(Wen Qiuqiu,Xia Qunli,Qi Zaikang.Pole Placement Design with Open-loop Crossover Frequency Constraint for Three-loop Autopilot[J].Journal of Systems Engineering and Electronics,2009,31(2):420-423.)
[5] 王輝,林德福,祁載康.導彈偽攻角反饋三回路駕駛儀設(shè)計分析[J].系統(tǒng)工程與電子技術(shù),2012,34(1):129-135.(Wang Hui,Lin Defu,Qi Zaikang.Design and Analysis of Missile Three-loop Autopilot with Pseudo-angle of Attack Feedback[J].Journal of Systems Engineering and Electronics,2012,34(1):129-135.)
[6] 林德福,王輝,王江,范軍芳.戰(zhàn)術(shù)導彈自動駕駛儀設(shè)計與制導律分析[M].北京:北京理工大學出版社,2012.(Lin Defu,Wang Hui,Wang Jiang,F(xiàn)an Junfang.Autopilot Design and Guidance Law Analysis for Tactical Missiles[M].Beijing:Beijing Institute of Technology Press,2012.)
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
