基于軟件接收機的分布式深組合仿真系統研究*
2015-03-10 10:35:06劉亞玲丁翠玲
航天控制 2015年3期
劉亞玲 陳 帥 丁翠玲
南京理工大學,南京210094
捷聯慣性導航系統(Strapdown Inertial Navigation System,SINS)[1]和全球導航衛星系統(Global Navigation Satellite Systems,GNSS)[2]有各自的特點與優點,同時也具有缺陷和不足,二者結合充分發揮了GNSS定位精度不隨時間改變和SINS完全自主導航的優勢[3-4]。按照組合深度,可把組合導航系統分為3類:松組合、緊組合和深組合[5]。松組合和緊組合導航系統中,GNSS接收機性能并未得到改善,接收機在高動態下不能穩定跟蹤衛星信號,組合導航系統無法正常工作。深組合不僅通過估計SINS誤差對SINS進行反饋校正,還利用校正后的SINS信息輔助 GNSS接收機跟蹤環路或直接用SINS信息閉合跟蹤環路[6],其實現形式主要有2種:Draper實驗室提出的基于深組合濾波器的集中式組合結構[7-8];斯坦福大學提出的基于緊組合濾波器的具備環路跟蹤輔助功能的分布式組合結構[9-10]。二者結構上存在差異,本質上均是將組合程度深入到基帶信號處理部分,以獲得更高的定位精度和系統性能[11]。分布式深組合比集中式深組合更易在工程上實現,因此成為深組合實現的主要方式。
本文為實現高動態環境下組合導航系統穩定導航定位,設計基于軟件接收機的分布式SINS/GNSS深組合仿真系統方案,基于VC++與Matlab混合編程,搭建基于GNSS軟件接收機的分布式深組合導航仿真系統,實現SINS與GNSS的雙向輔助。實驗表明:分布式深組合導航系統提高了高動態環境下GNSS接收機的動態跟蹤性能和組合導航系統的導航定位精度。
1 分布式深組合仿真系統方案設計
與硬件接收機相比,軟件接收機通過軟件方式實現對信號的處理,成本低,易于實現,具有更高的靈活性、開發性和通用性,成為導航領域的研究熱點。基于軟件接收機的組合導航系統打破了接收機硬件設計的局限性,便于修改系統參數和架構以驗證新算法,靈活性較高。基于GNSS軟件接收機的分布式SINS/GNSS深組合仿真系統方案設計如圖1所示。

圖1 基于軟件接收機的分布式深組合仿真系統方案設計
圖1中,軌跡發生器產生所需軌跡,衛星導航信號模擬器模擬的衛星信號經中頻信號采集器處理產生數字中頻信號,GNSS軟件接收機對信號進行捕獲和跟蹤,輸出偽距和偽距率信息;IMU采集載體角速度和比力信息,進行捷聯慣導解算并計算載體和衛星間的偽距、偽距率信息;組合導航濾波器對GNSS和SINS各自輸出的偽距和偽距率信息進行信息融合,并修正SINS的各種誤差量,提高組合導航精度;利用校正后的SINS信息和衛星星歷信息對多普勒頻移進行估計,對GNSS跟蹤環路進行頻率輔助,消除由載體與衛星的相對運動造成的動態應力影響,提高GNSS接收機在高動態環境下的動態跟蹤性能。
2 分布式深組合仿真系統實現
2.1 跟蹤環路頻率輔助算法
分布式深組合導航仿真系統中,為保證系統的穩定性和可靠性,采用頻率輔助算法輔助GNSS跟蹤環路,提高GNSS接收機的動態跟蹤性能,其原理如圖2所示。
式中,T為跟蹤環路積分時間。
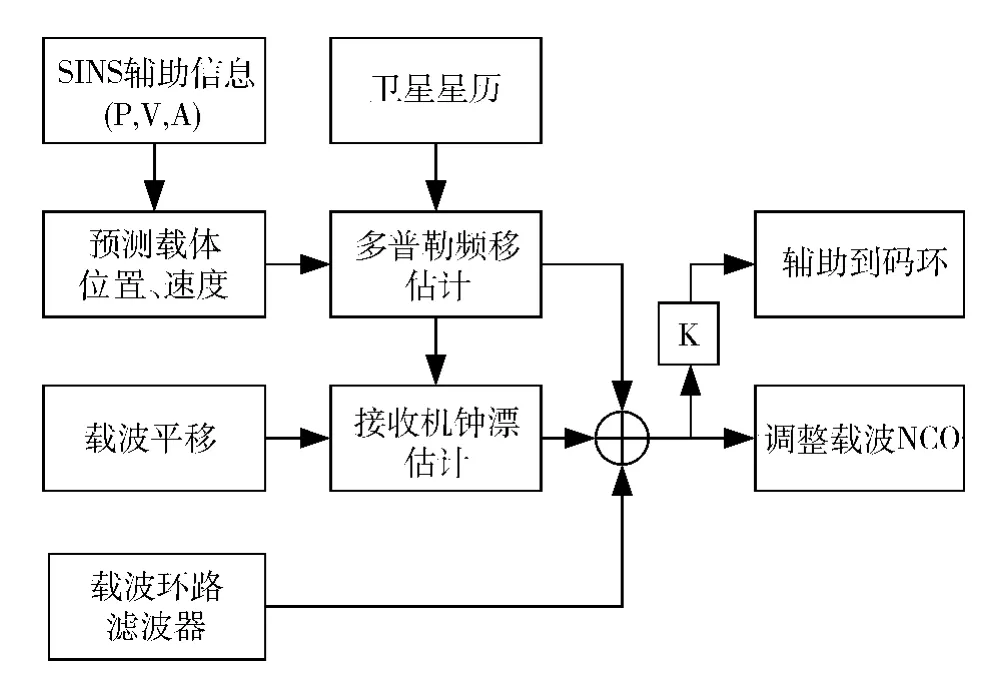
圖2 跟蹤環路頻率輔助算法原理圖
由預測載體位置、速度信息及衛星星歷計算出接收機與衛星相對運動造成的多普勒頻移為

2.2 深組合濾波器模型
深組合濾波器采用改進的基于偽距和偽距率的組合濾波器,對GNSS偽距及偽距率進行平滑,將SINS與平滑后GNSS的偽距差和偽距率差作為量測信息進行信息融合,對SINS誤差進行反饋校正,同時利用校正后的SINS信息輔助GNSS跟蹤環路。

分布式深組合濾波器模型與緊組合系統類似,系統誤差狀態包括SINS誤差狀態和GNSS誤差狀態。SINS誤差狀態包括東北天姿態角誤差、東北天速度誤差、緯經高位置誤差、載體系下三軸陀螺常值漂移、載體系下三軸加速度計零偏;GNSS誤差狀態包括時鐘等效距離誤差、鐘頻等效距離率誤差。當GNSS接收機有效接收星數大于4顆時,通過選星算法獲取最佳4顆導航星[12],當有效收星數小于4顆時,所有通道量測信息都用于構造觀測方程。故系統狀態方程和量測方程為

2.3 混合編程實現
Matlab是一個高效、完整的數學平臺,具有強大的數值分析和矩陣運算能力,語言簡單,但代碼執行率較低;VC++編程語言靈活高效,用其開發的系統界面友好、代碼率高、執行速度快,但在數值分析和工程計算方面不足,因此兩者結合可實現優勢互補,平衡編程時間和程序執行效率。GNSS軟件接收機以軟件形式實現基帶信號處理,涉及大量數據計算和處理,Matlab在這方面優勢明顯,所以軟件接收機采用Matlab實現。基于 GNSS軟件接收機,利用VC++與Matlab混合編程實現深組合導航仿真系統搭建,該仿真系統利用Matlab提供的mcc編譯器,將Matlab編寫的軟件接收機(*.m)編譯成動態鏈接庫,供VC程序調用。
利用mcc編譯器前需要在Matlab環境下對C/C++編譯環境進行配置,配置過程為:
1)在Matlab命令窗口輸入:mbuild-setup;
2)按照提示選擇VC的編譯器,完成后在Matlab命令窗口中輸入:mex-setup。
由于VC++需要調用Mablab生成的動態鏈接庫,因此要對VC++編譯環境進行配置,主要包括:
1)設置Matlab中頭文件(*.h)和鏈接庫(*.lib)的路徑;
2)設置運行時動態鏈接庫;
3)設置靜態鏈接的引入庫文件;
4)在調用Matlab函數的VC++源程序中包含*.h。
通過上述步驟即可實現VC++對Matlab函數的調用。通過添加包含mwArray類的文件進行數據交互,實現VC++與Matlab之間的參數傳遞:VC++向Matlab傳遞慣性輔助信息,數據更新頻率為200Hz;Matlab向VC++傳遞GNSS接收機通道信息,數據更新頻率為10Hz。深組合導航仿真系統工作流程如圖3所示。

圖3 深組合導航仿真系統工作流程圖
3 實驗及結果分析
3.1 實驗條件
采用衛星導航信號模擬器模擬衛星信號。通過中頻信號采集器采集數字中頻信號,采樣率為16.369MHz,中頻為3.996MHz;GNSS軟件接收機采用三階鎖相環進行載波跟蹤,環路積分時間為1ms;SINS輸出頻率為200Hz,慣導測量精度為:加速度計比例誤差200ppm,加速度計白噪聲1mg,加速度計零偏1mg,陀螺儀比例誤差200ppm,陀螺儀白噪聲3.0(°)/h,陀螺儀漂移2(°)/h;組合濾波器組合頻率為10Hz。
模擬高動態彈道軌跡設置如下:起點:北緯38.7580°、東經 105.6100°、高程 1431.90m;終點:北緯38.9961°、東經 105.6195°、高程 20767.6203m;初始靜止20s,然后從起點飛至終點,飛行時長為60s,模擬時間共80s,飛行過程中最大速度1000m/s,最大加速度20g,最大加加速度40g/s,載體運動軌跡如圖4所示。

圖4 載體運動軌跡
3.2 結果分析
分布式深組合導航仿真系統監控顯示界面如圖5所示,可實時顯示收星情況、GNSS量測信息、組合導航信息及誤差信息。
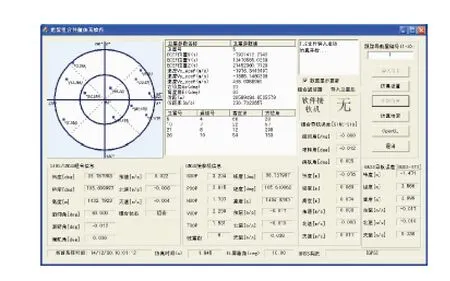
圖5 深組合導航仿真系統監控顯示界面
分布式深組合導航仿真系統組合導航定位結果及誤差曲線如圖6和7所示。
根據圖6和7可知,基于軟件接收機的分布式深組合導航系統在靜態和高動態下都能穩定導航定位,組合水平位置誤差小于2m,高程誤差小于10m,組合水平速度誤差小于0.2m/s,天向速度誤差小于1m/s,姿態角誤差小于0.3°。

圖6 組合導航定位結果圖
4 結論
為實現高動態環境下組合導航系統穩定導航定位,設計了基于軟件接收機的分布式SINS/GNSS深組合導航仿真系統方案,采用改進的基于偽距、偽距率的組合濾波器,對SINS和GNSS輸出的偽距和偽距率信息進行數據融合并校正SINS誤差,同時利用校正后的SINS信息對GNSS跟蹤環路進行頻率輔助。通過VC++與Matlab混合編程,搭建了基于GNSS軟件接收機的分布式深組合導航仿真系統,實現了SINS與GNSS的雙向輔助,提高了高動態環境下GNSS接收機的動態跟蹤性能和組合導航系統導航定位能力。

圖7 組合導航誤差曲線圖
[1] 張天光,等.譯.捷聯慣性導航系統(第二版)[M].北京:國防工業出版社,2007.(Zhang Tianguang,et al.Translation.Strap-down Inertial Navigation System(Second Edition)[M].Beijing:National Defense Industry Press,2007.)
[2] 謝鋼.GNSS原理與接收機設計[M].北京:電子工業出版社,2011.(Xie Gang.Principles of GPS and Receiver Design[M].Beijing:Publishing House of Electronics Industry,2011.)
[3] Schultz C E.INS and GNSS integration[D].Denmark:Technical University of Denmark,2006.
[4] Cox D B.Integration of GNSS with inertial navigation systems[J].Navigation,1979,1(1):144-53.
[5] Matthew Lashley,David M Bevly,John Y Hung.Analysis of deeply integrated and tightly coupled architectures[C]//Position Location and Navigation Symposium,2010,2153-358X:382-396.
[6] Alban S,Akos D M,Rock S M.Performance Analysis and Architectures for INS-Aided GNSS Tracking Loops[C]//Proceedings of the 2003 National Technical Meeting of the Institute of Navigation,Anaheim,California,January 22-24,2003:611-622.
[7] Gustafson D,Dowdle J,Flueckiger K.A high antijam GNSS based navigator[C]//Proceedings of ION National Technical Meeting.Anaheim,2000:495-503.
[8] 單童.深組合系統中慣性輔助GNSS基帶技術研究[D].南京:南京理工大學,2013.(Shan Tong.Research on Inertial Information Aided GNSS Baseband Technology in Ultra-tight Coupled Navigation System[D].Nanjing:Nanjing University of Science and Technology,2013.)
[9] Gautier J D,Parkinson B W,Gebre-Egziabher D.U-sing the GNSS/INS generalized evaluation tool(GIGET)for the comparison of loosely coupled,tightly coupled and ultra-tightly coupled integrated navigation systems[C]//Proceedings of ION 59th Annual Meeting.Albuquerque,2003:65-76.
[10] 高帥和,趙琳.不同 GNSS/SINS深組合導航框架的分析與等價性推導[J].中國慣性技術學報,2011,19(5):571-574.(Gao Shuaihe,Zhao Lin.Analysis and Equivalebce Derivation of Different Ultra-tight Coupled Navigation Structures[J].Journal of Chinese Inertial Technology,2011,19(5):571-574.)
[11] 趙琳,高帥和,丁繼成,等.超緊GPS/SINS組合導航系統研究綜述[C].第二屆中國衛星導航學術年會,上海,2011.(Zhao Lin,Gao Shuaihe,Ding Jicheng,et al.Survey of Research on GPS/SINS Ultra-tight Integrated Navigation System[C].The Second China Satellite Navigation Conference,Shanghai,2011.)
[12] Sheikh S I.The Use of Variable Celestial X-Ray Sources for Spacecraft Navigation[D].Maryland:University of Maryland,2005.
[13] 劉建業,曾慶化,趙偉,熊智.導航系統理論與應用[M].西安:西北工業大學出版社,2010.(Liu Jianye,Zeng Qinghua,Zhao Wei,Xiong Zhi.Principles and Applications of Navigation Systems[M].Xi'an:Publishing House of Northwestern Polytechnical University,2010.)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
