再入飛行器多變量穩(wěn)定裕度研究
2015-03-10 10:33:52曹玉騰倪少波
航天控制 2015年5期
曹玉騰 倪少波
北京航天自動控制研究所,北京100854
再入機動飛行器往往飛行馬赫數高、機動范圍大,造成俯仰、偏航和滾動三通道耦合強烈,此類控制對象本質上為MIMO系統(tǒng),采用基于多變量控制的相關理論和方法是解決這類飛行器姿態(tài)控制系統(tǒng)設計的有效方法,且多變量系統(tǒng)穩(wěn)定裕度統(tǒng)計方法較傳統(tǒng)的基于單通道穩(wěn)定裕度計算方法更能反映這類飛行器控制系統(tǒng)的穩(wěn)定程度。
傳統(tǒng)穩(wěn)定裕度分析方法主要基于SISO系統(tǒng),不能分析通道間耦合引起的不確定性。隨著控制理論的發(fā)展,目前MIMO系統(tǒng)穩(wěn)定裕度分析方法大致有以下幾種:回差矩陣奇異值方法、基于結構奇異值的μ分析方法、實多回路穩(wěn)定分析法、Gershgorin圓盤法和穩(wěn)定超球面法等。其中回差矩陣奇異值法引入傳統(tǒng)基于SISO系統(tǒng)幅值裕度和相位裕度的概念,解決了MIMO系統(tǒng)的穩(wěn)定裕度,因此在工程上得到了較廣泛的應用[1]。該方法優(yōu)點是計算簡單,易于工程實現,缺點是計算保守性較大,為此Doyle提出采用結構奇異值分析不確定系統(tǒng)穩(wěn)定裕度的μ方法[2],該方法在改善計算保守性方面有一定的優(yōu)勢,并在國內飛行控制領域得到了一定的應用[3]。
本文在回差矩陣奇異值法的基礎上進行了改進,提出了攝動矩陣迭代法,由計算結果與回差矩陣奇異值法相比,攝動矩陣迭代法大大改善了計算系統(tǒng)穩(wěn)定裕度的保守性,且計算結果較為可靠。
1 回差矩陣奇異值法[4]
通過圖1討論采用回差矩陣奇異值計算多變量系統(tǒng)穩(wěn)定裕度。圖1(a)中,G(s)為多變量控制對象,F(s)為反饋控制器,圖1(b)中,矩陣 L=diag(l1,l2,…,ln)為附加的攝動矩陣,其中 li(i=1,2,…,n)是可變的復數,用來檢測系統(tǒng)在發(fā)生攝動情況下的魯棒性。
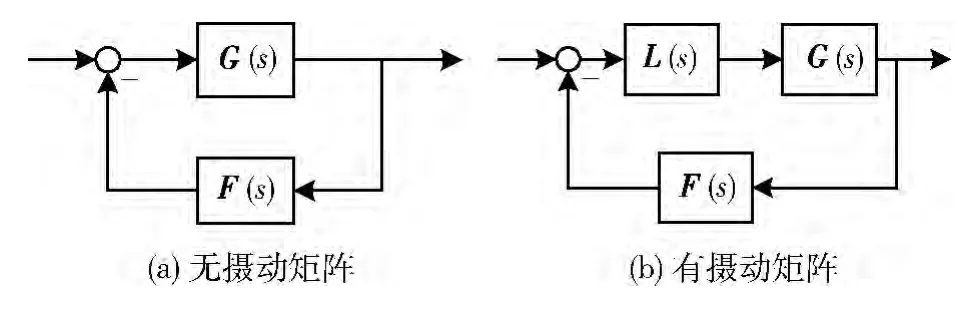
圖1 多變量控制系統(tǒng)結構
在圖1所示的系統(tǒng)中,所加入的攝動矩陣L形式為
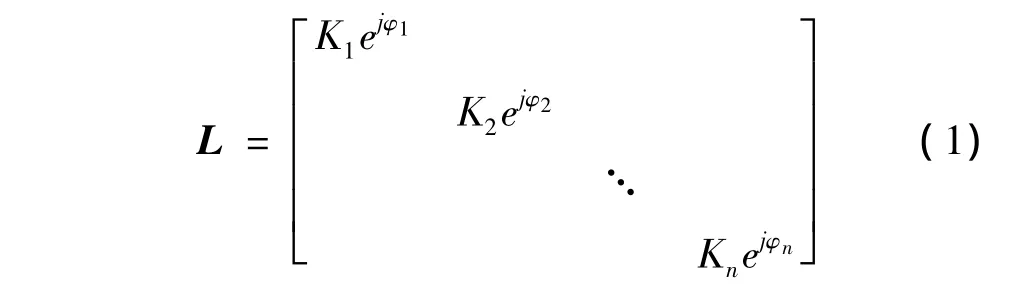
其中,Ki,φi分別為攝動矩陣某一通道的增益和相位。如果系統(tǒng)正常工作,無攝動發(fā)生,則Ki=1,φi=0,即L矩陣為單位陣。
如圖1(b)所示系統(tǒng),若加入攝動系統(tǒng)L(s)后閉環(huán)系統(tǒng)保持穩(wěn)定,這意味著系統(tǒng)的回差陣是非奇異的,有以下關系成立
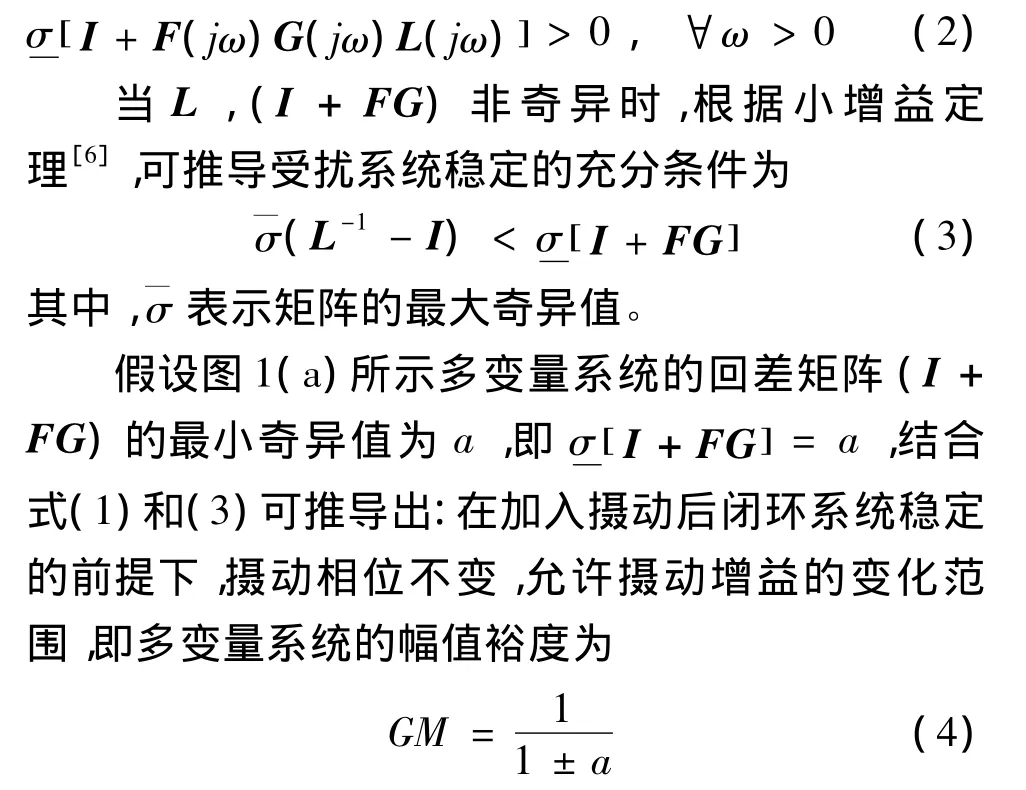
以及攝動增益不變,允許攝動相位的變化范圍,即多變量系統(tǒng)的相位裕度

由此可得,所有回路的增益或相位可以在由式(4)和(5)計算得到的幅值或相位裕度范圍內變化,不會導致系統(tǒng)不穩(wěn)定。但由于式(3)是閉環(huán)系統(tǒng)穩(wěn)定的充分條件,故通過該方法計算多變量系統(tǒng)穩(wěn)定裕度存在保守性。
2 攝動矩陣迭代法
針對回差矩陣奇異值法計算保守性較大的問題,本文研究了攝動矩陣迭代法,該方法以回差矩陣奇異值法為基礎,通過回差矩陣奇異值法計算系統(tǒng)穩(wěn)定裕度,并構造系統(tǒng)的攝動矩陣,通過不斷增加攝動矩陣的增益和相位,使攝動后的系統(tǒng)逐漸逼近臨界穩(wěn)定狀態(tài),從而得到多變量系統(tǒng)真正的穩(wěn)定裕度。
2.1 設計思路
攝動矩陣迭代法的設計思路如圖2所示,首先應用回差矩陣奇異值法計算多變量控制系統(tǒng)的穩(wěn)定裕度,根據穩(wěn)定裕度計算結果構成攝動矩陣L1,將L1串入多變量系統(tǒng),再次應用回差矩陣奇異值法計算穩(wěn)定裕度,并得到 L2,再將L2串入系統(tǒng),計算L3,如此不斷循環(huán)。每一步的迭代需首先判斷當前系統(tǒng)的閉環(huán)特征根,若閉環(huán)特征根全部為負,則繼續(xù)迭代,否則跳出迭代。最終得到系統(tǒng)幅值裕度和相位裕度為L=L1L2…Ln的增益和相位。
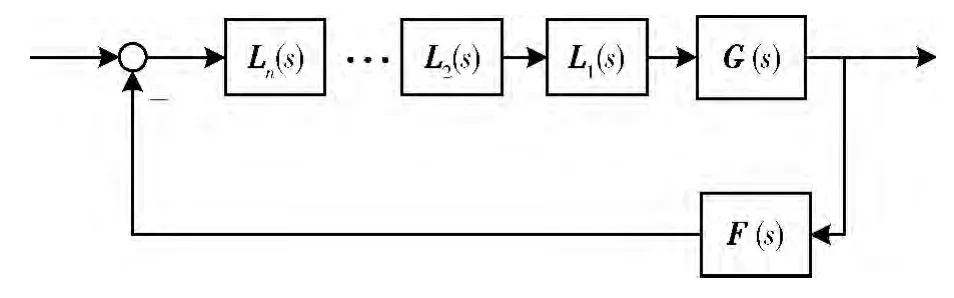
圖2 攝動矩陣迭代法原理框圖
2.2 設計步驟
以飛行器某一特定飛行狀態(tài)對應的相位裕度為例來具體說明攝動矩陣迭代法的計算步驟:
1)應用回差矩陣奇異值法初步計算多變量系統(tǒng)相位裕度,有以下關系成立

計算可得ω∈(0,+∞)范圍內,系統(tǒng)回差矩陣最小奇異值為0.531,對應頻率值為113rad/s,最小奇異值隨頻率的變化關系見圖3。
多變量系統(tǒng)的幅值裕度和相位裕度分別為

3)將攝動矩陣L1串入系統(tǒng),計算此時閉環(huán)系統(tǒng)特征根位于復平面右邊平面的個數p0,若p0=0,則返回步驟2);若p0≠0,則停止計算,若迭代超過10次,則停止運算。
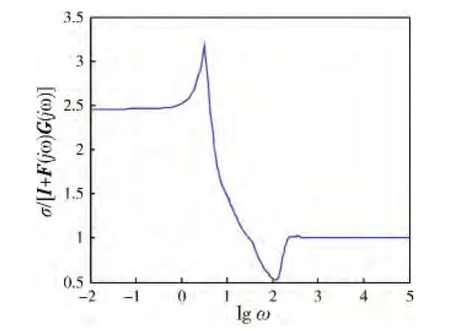
圖3 最小奇異值隨頻率變化關系曲線
經攝動矩陣迭代法計算得到系統(tǒng)最終的相位裕度為50.22,同理也可應用攝動矩陣迭代法計算系統(tǒng)幅值裕度,該方法的算法流程如圖4所示。
將攝動矩陣迭代法和回差矩陣奇異值法計算的多變量系統(tǒng)穩(wěn)定裕度進行對比,如表1所示。

表1 多變量控制系統(tǒng)的穩(wěn)定裕度

圖4 攝動矩陣迭代法流程圖
應用改進的穩(wěn)定裕度計算方法,系統(tǒng)的幅值裕度和相位裕度均有了明顯改善,大大減小了穩(wěn)定裕度計算的保守性。和單通道穩(wěn)定裕度相比,攝動矩陣迭代法計算的系統(tǒng)穩(wěn)定裕度從多變量的角度更真實的反映了多變量控制系統(tǒng)的穩(wěn)定裕度。
3 仿真驗證
根據多變量系統(tǒng)的幅值裕度和相位裕度確定攝動矩陣L,代入控制系統(tǒng)定點仿真模型中進行仿真。其中攝動矩陣L分別為:
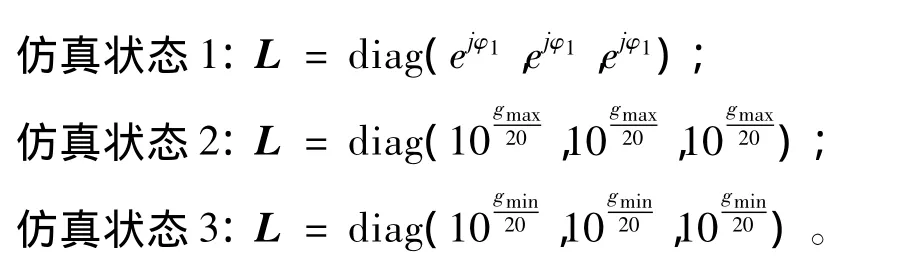
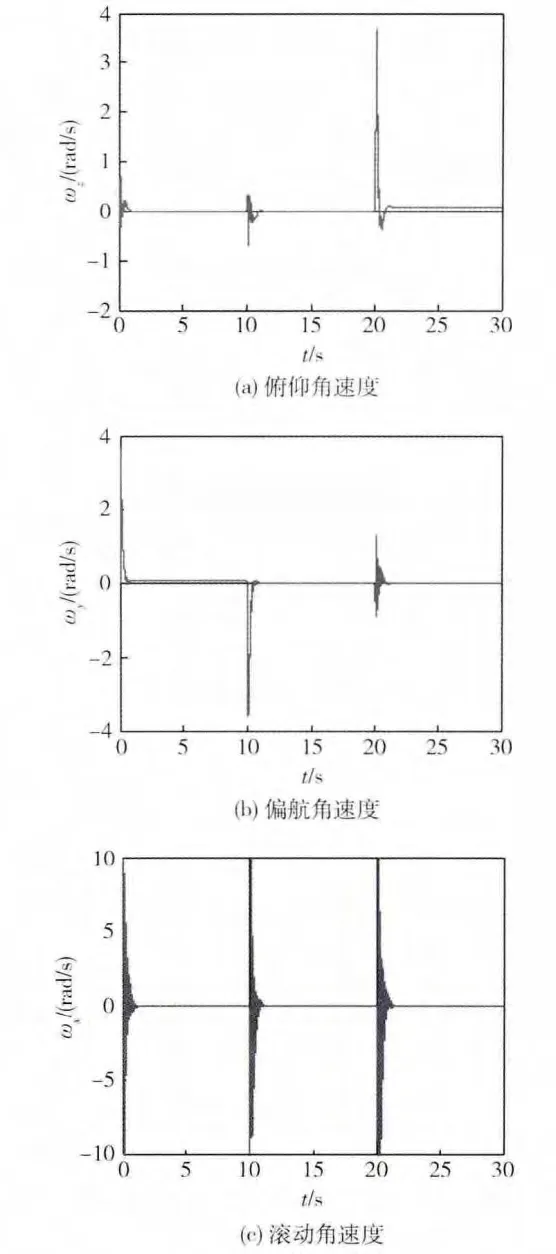
圖5 仿真狀態(tài)1
由以上仿真結果中可以得出:仿真狀態(tài)1中,系統(tǒng)出現高頻振蕩,但最終趨于穩(wěn)定,說明此時系統(tǒng)接近發(fā)散;仿真狀態(tài)2中,相較于仿真狀態(tài)1,系統(tǒng)的高頻振蕩較小,說明gmax還有進一步提高的空間;仿真狀態(tài)3中,系統(tǒng)出現低頻振蕩并且臨近發(fā)散,此時gmin的保守性也很小。綜合比較起來,PM,gmax,gmin三項穩(wěn)定指標的保守性均很小,其中PM與gmin最接近系統(tǒng)真實的裕度。
4 結論
應用多變量控制理論,通過計算多變量系統(tǒng)回差矩陣的最小奇異值,得到多變量系統(tǒng)的幅值裕度和相位裕度。針對該方法在計算穩(wěn)定裕度時的保守性,采用攝動矩陣迭代法大大改善了其保守性,且效果較佳。并通過仿真證明了攝動矩陣迭代法計算系統(tǒng)穩(wěn)定裕度保守性小,且可靠性較高。
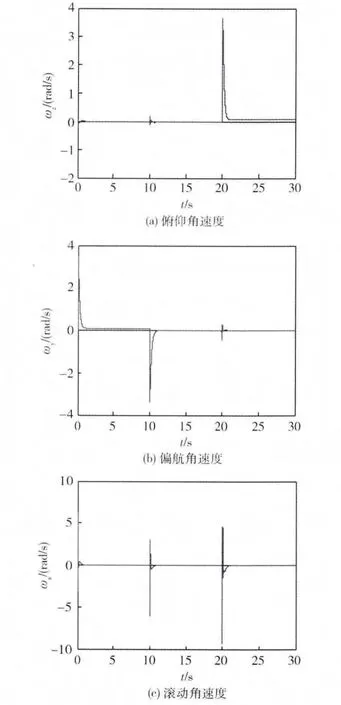
圖6 仿真狀態(tài)2
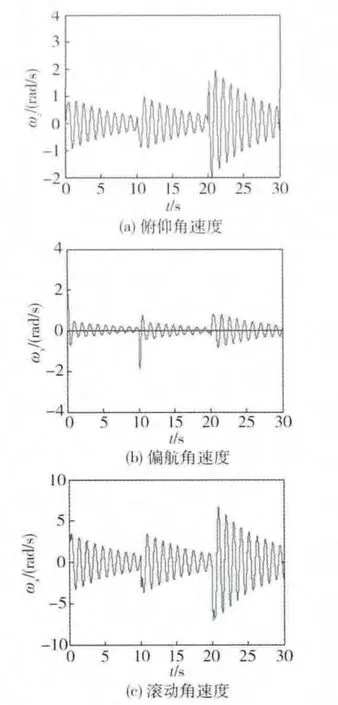
圖7 仿真狀態(tài)3
[1] 李帆.不確定性系統(tǒng)的解耦控制與穩(wěn)定裕度分析[D].西安:西北工業(yè)大學2001.(LI Fan.The Decoupling Control Study and Stability Margin Evaluation of Multivariable Uncertain Systems[D].Xi'an:A Dissertation Submitted for the Degree of Ph.D of Northwestern Polytechnical University,2001.)
[2] Doyle J C.Analysis of feedback systems with structured uncertainties[J].IEEE Proceedings,Part D,1982,129(6):242-250.
[3] 李洪超,史忠科.多變量飛控系統(tǒng)穩(wěn)定裕度的μ分析方法研究[J].飛行力學,2006,24(2):31-34.(Li Hongchao,Shi Zhongke.Study of μ analysis method for evaluation of stability margin of a multivariable flight control system[J].Flight Dynamics,2006,24(2):31-34.)
[4] 吳斌,程鵬.多變量飛控系統(tǒng)的穩(wěn)定裕度分析[J].航空學報,1998,19(6):657-661.(Wu Bin,Cheng Peng.Stability margin analysis of the multiloop flight control systems[J].Acta Aeronautica et Astronautica Sinica,1998,19(6):657-661.)
[5] 周克敏.魯棒與最優(yōu)控制[M].北京:國防工業(yè)出版社,2001.(Zhou Kemin.Robust and Optimal Control[M].Beijing:National Defend Industry Press,2001.)
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
