電帆日心懸浮軌道穩(wěn)定控制
2015-03-10 10:33:58邊炳秀魏延明
航天控制 2015年5期
關鍵詞:環(huán)境
王 昱 邊炳秀 魏延明 李 永 于 洋
1.北京控制工程研究所,北京100080
2.通信衛(wèi)星事業(yè)部,北京100094
隨著人類探索空間步伐的加快,對空間推進技術提出了更高的要求,希望推進器不依賴、或僅需少量推進劑即可使航天器長期運行。一類依靠空間環(huán)境能源的新穎推進技術被相繼提出,其中包括太陽帆、磁帆及電帆等。電帆[1]是由Janhunen教授提出的一種利用空間太陽風動能的無工質(zhì)推進技術,通過電場偏轉(zhuǎn)太陽風中的帶電粒子來獲取推力。相比其他無工質(zhì)推進裝置,電帆具有質(zhì)量小、推力矢量可調(diào)等優(yōu)點,在深空探測領域展現(xiàn)出極大的潛力。
電帆直接利用空間太陽風動能,無需消耗推進劑,理論上可以實現(xiàn)幾乎所有的空間任務。目前,已提出了各種利用電帆的空間任務,如太陽系內(nèi)行星之間的軌跡轉(zhuǎn)移[2]、與危險小行星及彗星的交會[3]、遠離太陽的深空探測[4]、利用連續(xù)推力形成人工拉格朗日點[5]及各種懸浮軌道[6]等。懸浮軌道是一類非開普勒軌道,其軌道面不包含中心天體,利用推進系統(tǒng)產(chǎn)生的連續(xù)推力平衡中心天體產(chǎn)生的引力,使航天器懸浮起來,根據(jù)中心引力體不同可以分為日心懸浮軌道和行星懸浮軌道。利用懸浮軌道特性可以開展一些傳統(tǒng)技術很難實現(xiàn)的任務,例如Ulysses solar polar mission任務對太陽極區(qū)活動的連續(xù)觀測[6],Polar Observation任務實現(xiàn)對地球極區(qū)進行觀測和通訊[7]。McInnes等[8]以太陽帆為推進器,對懸浮軌道作了大量研究,按照懸浮軌道周期的不同將懸浮軌道分成3類,并且分析了這3類軌道的穩(wěn)定性,提出了軌道保持算法。Mengali等[6]在上述基礎上研究了以電帆作為推進器的懸浮軌道,并對軌道參數(shù)在初值誤差下的穩(wěn)定性進行簡要分析,但并未考慮到太陽風環(huán)境對懸浮軌道穩(wěn)定性的影響。
電帆通過偏轉(zhuǎn)太陽風中帶電粒子獲取推力,而太陽風中的粒子濃度、粒子速度及粒子能量在空間與時間分布上存在著極大的時變性,導致電帆實際產(chǎn)生的推力也存在強時變性。而利用電帆產(chǎn)生的連續(xù)推力所設計的懸浮軌道是一種臨界穩(wěn)定狀態(tài),輕微的外界干擾會使該平衡狀態(tài)遭到破壞。目前,尚未有學者對電帆懸浮軌道的維持進行研究。本文首先分析了電帆懸浮軌道所需條件,建立電帆空間三維運動方程,基于該方程提出了一種適合電帆對象的懸浮軌道維持策略,利用工程上較成熟的最優(yōu)二次型調(diào)節(jié)器(LQR)來實現(xiàn)軌道跟蹤控制。該軌道保持策略對于所有的懸浮軌道都穩(wěn)定,且對于不同太陽風環(huán)境具有較強的魯棒性。
1 日心懸浮軌道
利用電帆可以實現(xiàn)圖1所示日心懸浮軌道,電帆以角速度ω運行在距離黃道面高度h,半徑R的圓軌道上。要實現(xiàn)日心懸浮軌道,必須使電帆產(chǎn)生的推力方向位于r-z平面內(nèi),因此,電帆推力角β=π/2,電帆在日心引力與推力作用下,維持周期性懸浮軌道,需滿足[6]:

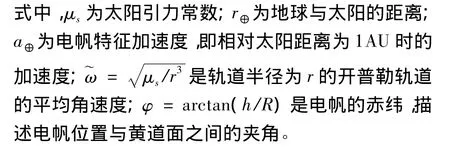
利用日心懸浮軌道能夠?qū)崿F(xiàn)一類有意義的與地球同步運行軌道,該懸浮軌道運動周期跟地球繞太陽公轉(zhuǎn)周期相同,T=1年。選取r=0.9AU,φ=25°,那么該懸浮軌道與地球之間的距離為0.42AU,當?shù)剌S與黃道面呈66.5°自轉(zhuǎn)運動時,利用該懸浮軌道可以對地球表面大部分地區(qū)進行持續(xù)的科學觀測和通訊。通過式(1)計算可以知道,維持該懸浮軌道,電帆所需性能參數(shù)為a⊕=3.163mm/s2,推力角 α =34.9°。
圖1 日心懸浮軌道
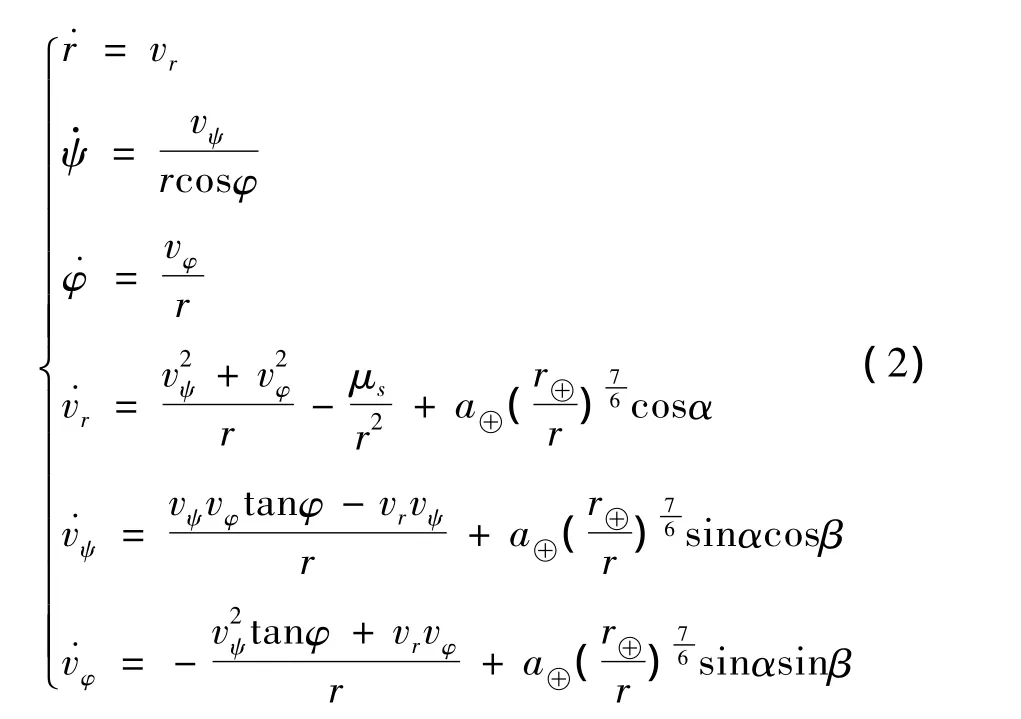
2 電帆運動學模型
建立電帆空間三維運動學方程如下所示[6]:
3 電帆推力及加速度模型
根據(jù)Mengali的研究工作,電帆特征加速度大小[1]為:

式中,mp為質(zhì)子質(zhì)量,vsw為太陽風速度,n為太陽風粒子濃度,∈0為真空介電常數(shù),Te為電子溫度,e為元電荷電量,V為導線電勢,rw為導線半徑。
值得注意的是,在電帆設計時,往往選定一個參考太陽風粒子濃度(n0)和最大導線電勢(V0)來設計電源模塊質(zhì)量。而對于給定的電源模塊,所能提供的功率是固定的。因此,電帆導線上的實際最大電勢與太陽風粒子濃度存在耦合關系。即當實際太陽風粒子濃度大于參考粒子濃度時,導線上的電子電流增大,而電源模塊的額定功率是一定的,因此導線上的實際最大電勢降低。反之則使導線上的實際最大電勢升高,這一過程的數(shù)學描述為:

式(4)表明電帆導線上實際允許的最大電勢值不僅受到設計時理論最大電勢的約束,同時太陽風環(huán)境中實際粒子濃度也影響實際最大電勢值。上述描述說明電帆在實際的太陽風環(huán)境中工作時,產(chǎn)生的推力與加速度不僅是強時變的,而且具有飽和約束,具體的約束上界值根據(jù)太陽風環(huán)境參數(shù)的變化而變化。
4 太陽風環(huán)境對電帆性能影響分析
4.1 太陽風環(huán)境模擬
通過對電帆航天器加速度模型分析,可以知道太陽風參數(shù)中的太陽風速度vsw、粒子濃度n和電子溫度Te的變化會對推力及加速度大小產(chǎn)生影響。本文選用美國空間科學數(shù)據(jù)中心(NSSDC),OMNI數(shù)據(jù)庫提供的實測太陽風數(shù)據(jù)作為太陽風環(huán)境仿真,包含1963~2014年間的日平均太陽風參數(shù),用來觀察實際太陽風環(huán)境對電帆性能影響。將上述龐大的數(shù)據(jù)去掉時間限制,作為一個數(shù)據(jù)集合用來對太陽風環(huán)境模擬,分析太陽風環(huán)境對懸浮軌道影響和控制策略的有效性。為了稱呼方便,以下將該數(shù)據(jù)集叫做太陽風環(huán)境參數(shù)模擬數(shù)據(jù)集(SESD)。
4.2 太陽風環(huán)境對電帆性能影響
分析太陽風參數(shù)對電帆性能的影響,本文選取2010年的實際太陽風參數(shù),研究在該太陽風環(huán)境中的電帆加速度變化。仿真結(jié)果如圖2所示,發(fā)現(xiàn)2010年中太陽風速度、粒子濃度和電子溫度均變化劇烈,且該年中電子溫度數(shù)值普遍小于歷年統(tǒng)計平均值,使得電帆加速度小于預先設計值,且波動范圍較大。
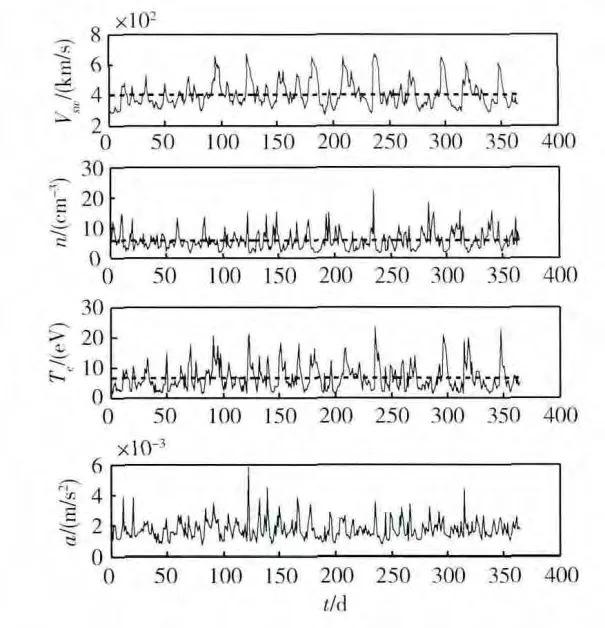
圖2 2010年太陽風參數(shù)變化及對電帆性能影響
上述結(jié)果表明,電帆在太陽風環(huán)境中產(chǎn)生的推力具有強時變性,且幅值波動較大。而日心懸浮軌道是一種臨界穩(wěn)定的平衡狀態(tài),環(huán)境擾動產(chǎn)生的輕微推力改變即會打破原有平衡狀態(tài),使懸浮軌道遭到破壞。
5 懸浮軌道保持的控制策略設計
5.1 控制策略設計
通過分析可以知道,針對懸浮軌道臨界穩(wěn)定,電帆產(chǎn)生的推力大小發(fā)生輕微的擾動即會導致懸浮軌道破壞。因此,有必要設計一種適合電帆對象的控制策略。電帆可以通過對單根導線上電勢大小進行調(diào)節(jié),控制單根導線上產(chǎn)生的推力大小,從而在帆面上產(chǎn)生凈力矩用來調(diào)節(jié)帆面姿態(tài),改變推力方向;也可以在維持帆面姿態(tài)不變的情形下同時按比例調(diào)節(jié)所有導線上的電勢大小,來改變推力大小。因此,電帆在空間產(chǎn)生的推力大小與方向解耦,使得電帆能夠通過改變帆面上各導線電勢大小的方法來分別調(diào)節(jié)推力的大小與方向。考慮到電帆的帆面通常由幾十至幾百根超細長導線組成,是一種超大柔性的多體結(jié)構(gòu),其在空間姿態(tài)的改變較為困難,且具有較大延時響應,姿態(tài)調(diào)節(jié)精度較低等特點。因此,本文擬采用只改變推力大小,維持推力方向不變(也即保持α=34.9°,β=90°)的方式來進行懸浮軌道保持控制。
上述控制策略的數(shù)學描述為:根據(jù)電帆運動學方程式(1),選取合適的控制率調(diào)節(jié)電帆特征加速度,使得電帆運行過程中跟蹤期望狀態(tài)量,針對第一節(jié)所描述的與地球同步運行日心懸浮軌道,電帆期望的各狀態(tài)量為:
電帆懸浮軌道保持控制的輸入為特征加速度大小,而實際電帆航天器可調(diào)對象為各導線電勢大小,通過對式(3)分析可知,當導線上電勢增大時電帆加速度增大,反之則減小。因此,建立執(zhí)行機構(gòu)的驅(qū)動方程,對式(3)進行逆向求解,建立電勢跟特征加速度的關系:
其中有關太陽風的參數(shù)(vsw,n,Te)無法在線測量,本文以近10年的統(tǒng)計平均太陽風參數(shù)(Vsw=400km/s,n=7.3/cm3,Te=12.15eV)進行計算。通過式(6)獲得的電勢大小需同時滿足式(4)及電帆允許最大電勢值的約束。因此,在實際飛行中,電帆的實際電勢大小是飽和受限的,且該飽和上界具有不確定性,跟具體的太陽風參數(shù)中粒子濃度有關。該特性導致懸浮軌道保持過程中控制輸入(加速度大小)具有時變性、不確定性及飽和性。
5.2 控制算法設計
LQR最優(yōu)控制是工業(yè)上一種較為成熟的理論,廣泛的應用于航空航天等領域[9]。該方法適用于系統(tǒng)動力學方程是線性的,性能指標函數(shù)是二次型的狀態(tài)反饋問題。因此,首先對無量綱化后的電帆運動學方程在期望工作點處進行線性化,得到:
上述計算所得的最優(yōu)控制u是δu,用來調(diào)節(jié)系統(tǒng)狀態(tài)使其回到期望工作點,因此,電帆總的控制輸入為:

6 仿真及結(jié)果分析
選取第一節(jié)中所描述的日心懸浮軌道為仿真對象,LQR跟蹤控制器參數(shù)為:
Q=[1;1;1;100;100;100],R=1 ×108,每隔0.5天對電帆狀態(tài)進行采樣控制。
首先,假設懸浮軌道在初始時刻處于期望工作點處,初始時刻軌道參數(shù)偏差為0,仿真驗證本文提出的軌道保持策略在不同模擬太陽風環(huán)境中的有效性及魯棒性。采用隨機從SESD數(shù)據(jù)集中選取一段時間的太陽風參數(shù)作為模擬太陽風環(huán)境。仿真結(jié)果如圖3~5所示。
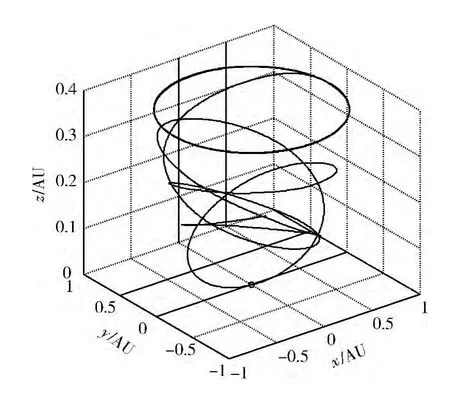
圖3 太陽風環(huán)境中持續(xù)3年的日心懸浮軌道
從圖3可以看到,由于太陽風環(huán)境參數(shù)的強時變性,導致電帆產(chǎn)生的控制輸入變化較大,致使臨界穩(wěn)定的懸浮軌道遭到嚴重破壞,懸浮軌道失去周期性變化特點,軌跡無序運行且雜亂無章。采用本文提出的軌道保持策略加LQR跟蹤控制器的方法,該懸浮軌道持續(xù)運行3年,軌道保持良好,從日心慣性坐標系中觀察,幾乎與標稱軌道重合。相應的,從圖4中可以看到整個軌道運行過程中,各狀態(tài)量的偏差較小,相對誤差均小于10-3量級,充分說明本文提出的軌道保持策略的有效性。圖5為軌道保持過程中控制量變化曲線,可以看出由于太陽風環(huán)境擾動,軌道狀態(tài)存在偏差,電帆通過改變特征加速度大小實時調(diào)節(jié)運行狀態(tài),實現(xiàn)懸浮軌道保持。

圖4 軌道保持過程中各狀態(tài)量偏差
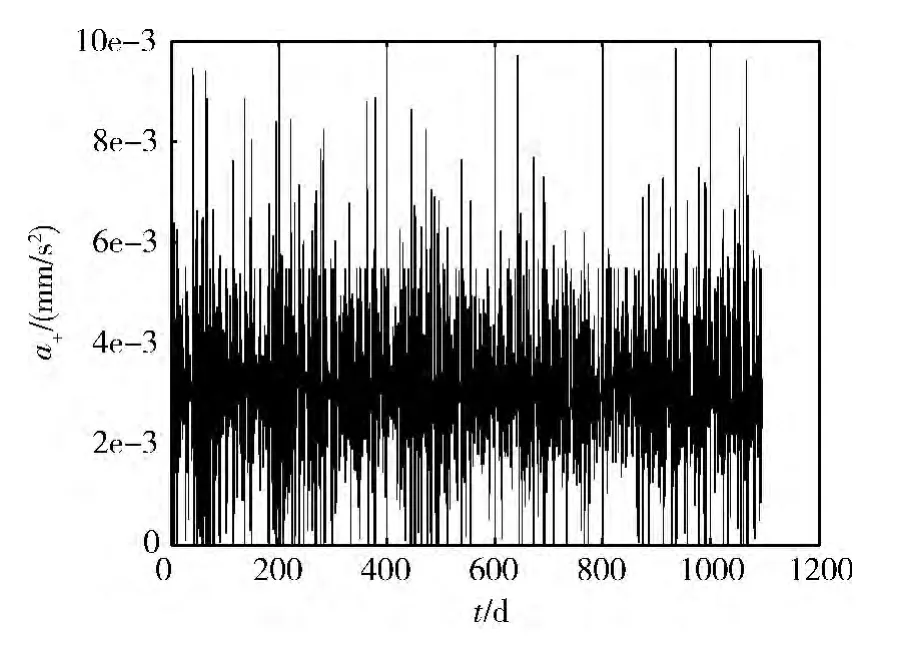
圖5 軌道保持過程中控制量變化
上述結(jié)果說明了本文提出的軌道保持策略對太陽風環(huán)境擾動的有效性。但是,由于懸浮軌道是一種脆弱的穩(wěn)定狀態(tài),在軌道初始時刻的狀態(tài)偏差同樣會導致懸浮軌道的破壞。因此,選取初始時刻不同狀態(tài)偏差 r(t0)=1.01 rd,φ(t0)=1.01 φd,分別在常值太陽風環(huán)境與模擬太陽風環(huán)境中仿真驗證軌道保持算法對初值擾動的有效性,持續(xù)運行3年的懸浮軌道仿真結(jié)果如圖6。
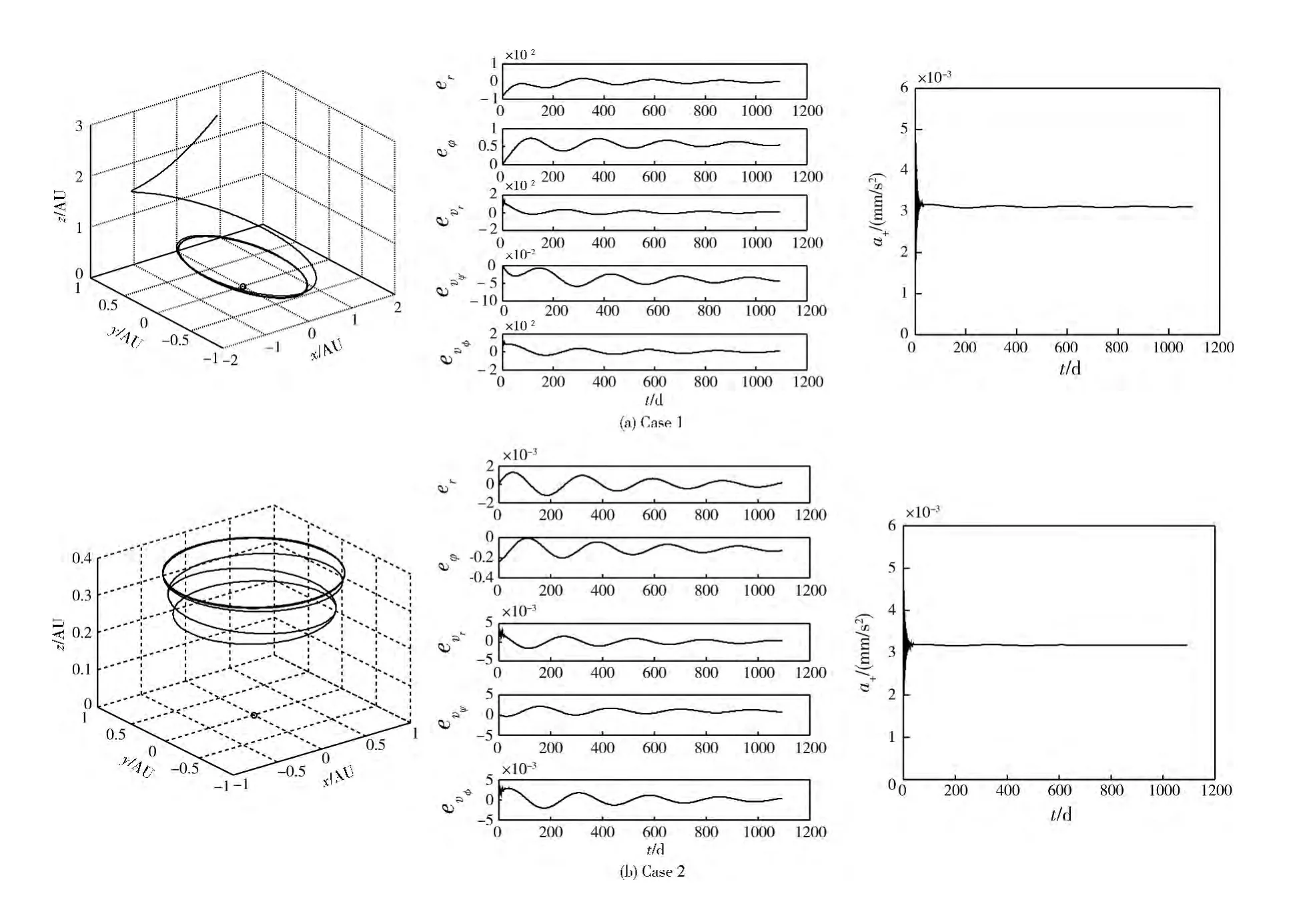
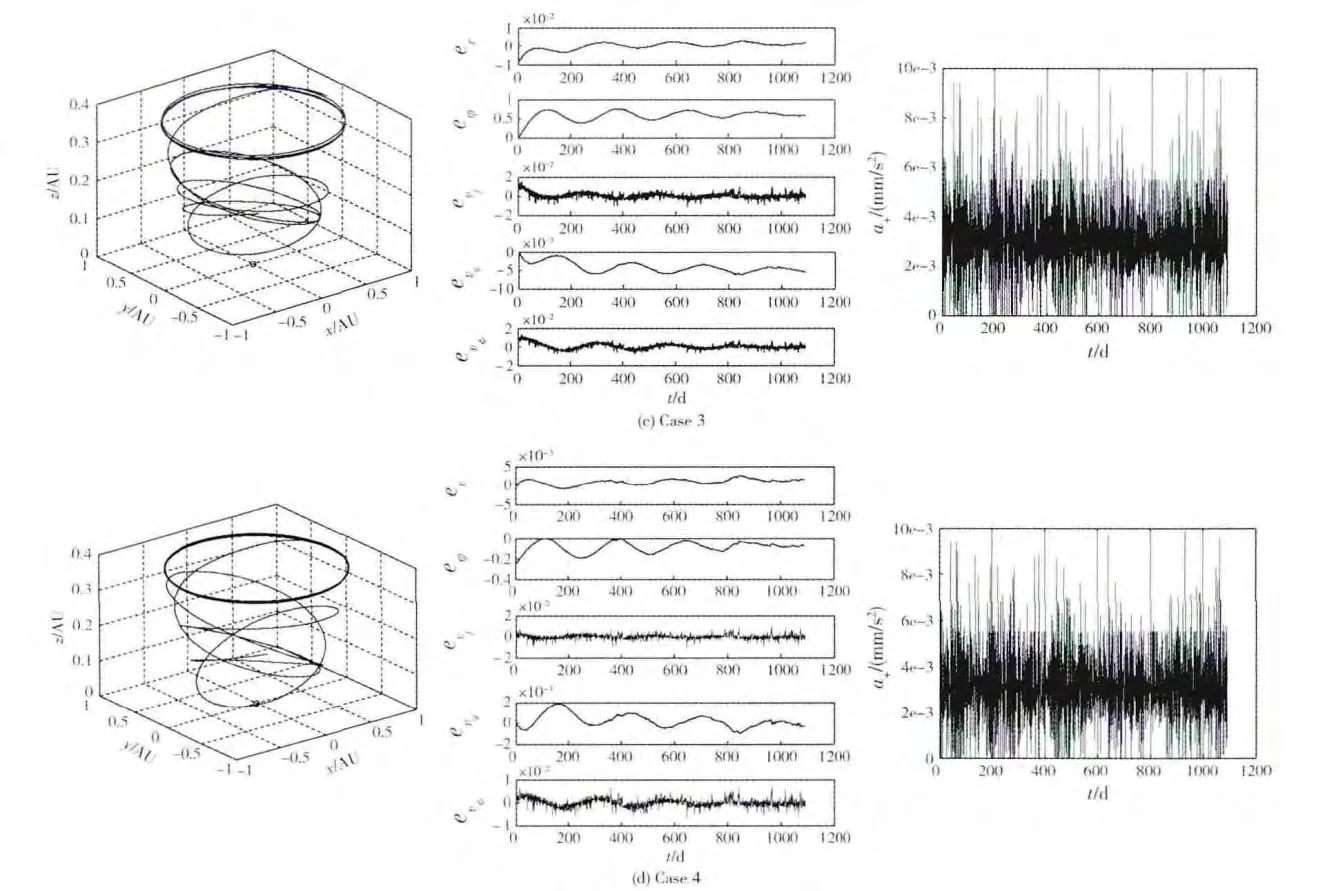
圖6 初值擾動對持續(xù)運行3年的懸浮軌道影響
從圖6可以發(fā)現(xiàn),當電帆在初始時刻狀態(tài)參數(shù)發(fā)生少量偏移1%的情況下,無論在常值太陽風環(huán)境(無環(huán)境擾動)還是在模擬太陽風環(huán)境(有環(huán)境擾動)中,該日心懸浮軌道均遭到破壞,軌跡隨時間逐漸發(fā)散,同時在有太陽風環(huán)境擾動的情形下,軌跡顯得雜亂無章,無序運動。當對具有上述初值擾動的懸浮軌道采用本文提出的軌道保持算法,可以明顯看到,懸浮軌道保持完整,具有周期性變化,在常值太陽風環(huán)境中幾乎與標稱軌道吻合,而在太陽風環(huán)境擾動下也只發(fā)生極少量偏移。充分說明本文提出的懸浮軌道保持策略對于軌道初值擾動具有良好的抑制能力。
7 結(jié)論
針對電帆這一超大撓性體結(jié)構(gòu),提出了一種只調(diào)節(jié)推力大小而不改變推力方向的軌道保持策略,該方法能極大減少電帆姿態(tài)的改變,克服大撓性體姿態(tài)改變困難、精度較低的缺點。同時采用工程上較為成熟的最優(yōu)狀態(tài)調(diào)節(jié)器方法設計跟蹤控制器,實現(xiàn)懸浮軌道保持控制策略。在模擬太陽風環(huán)境中,針對無初值擾動和有初值擾動情況下仿真驗證本文提出的軌道保持策略的有效性。仿真結(jié)果表明本文提出的軌道保持策略能在外界環(huán)境干擾和初值擾動的情形下較好的維持懸浮軌道,該算法對于不同的太陽風環(huán)境均具有良好的性能,表明本文提出的算法具有較強的魯棒性。
[1] Mengli G,Quarta A A,Janhunen P.Electric Sail Performance Analysis[J].Journal of Spacecraft and Rockets,2008,45(1):122-129.
[2] Quarta A A,Mengali G,Janhunen P.Optimal interplanetary rendezvous combining electric sail and high thrust propulsion system[J].Acta Astronautica,2011(68),603-621.
[3] Quarta A A,Mengali G.Electric sail missions to potentially hazardous asteroids[J].Acta Astronautica,2010(66):1506-1519.
[4] Quarta A A,Mengali G.Electric sail mission analysis for outer solar system exploration[J].Journal of Guidance,Control,and Dynamics,2010,33(3):740-754.
[5] Aliasi G,Mengali G,Quarta A A.Artificial equilibrium points for a generalized sail in the circular restricted three-body problem[J].Celest Mech Dyn Astr,2011(110):343-368.
[6] Mengali G,Quarta A A.Non-keplerian orbits for electric sails[J].Celest Mech Dyn Astr,2009(105):179-195.
[7] McInnes C R.Solar sail mission applications for nonkeplerian orbits[J].Acta Astronautica,1999(45):567-575.
[8] McInnes C R,Simmons F L.Solar sail orbits I:heliocentric case[J].Journal of Spacecraft and Rockets,1992,29(4):465-471.
[9] 郭延寧,李傳江,馬廣富.基于LQR的小衛(wèi)星磁姿態(tài)控制設計[J].空間控制技術與應用,2008,34(5):61-64.(Guo Yanning,Li Chuanjiang,Ma Guangfu.An LQR-Based magnetic attitude control design for small satellite[J].Aerospace Control and Application,2008,34(5):61-64.)
[10] Dukeman G A.Profile-following Entry Guidance Using Linear Quadratic Regulator Theory[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.5-8 August 2002,Monterey,California.
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環(huán)境監(jiān)察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38
