基于WBS的船載測控系統效能評估研究
2015-03-10 04:03:21楊奕飛李少華戴躍偉孔建壽凌曉冬
現代雷達 2015年9期
楊奕飛,李少華,戴躍偉,孔建壽,凌曉冬
(1. 南京理工大學 自動化學院, 南京 210094; 2. 江蘇科技大學 電子信息學院, 江蘇 鎮江 212003) (3. 飛行器海上測量與控制聯合實驗室, 江蘇 江陰 214431)
?
·總體工程·
基于WBS的船載測控系統效能評估研究
楊奕飛1,2,李少華2,戴躍偉1,2,孔建壽1,凌曉冬3
(1. 南京理工大學 自動化學院, 南京 210094; 2. 江蘇科技大學 電子信息學院, 江蘇 鎮江 212003) (3. 飛行器海上測量與控制聯合實驗室, 江蘇 江陰 214431)
提出了基于工作結構分解和層次分析法動態權重的效能評估方法,根據系統工作原理、信號流程和任務要求建立工作任務結構分解模型,根據子任務時間邏輯順序建立活動結構分解模型。子任務效能采用ADC模型進行評估,子任務權重采用層次分析法計算,并根據子任務的執行時間區間對每個評估時間點的子任務權重進行動態計算,計算得到的效能時間函數曲線能較好地體現系統效能的動態變化過程。最后給出了評估仿真算例。
測控系統;效能評估;工作結構分解
0 引 言
航天測量船是我國航天測控網不可或缺的一部分,它是由船舶動力系統、測控通信系統、航海氣象系統、后勤保障系統等多個不同類型系統組成的復雜大系統,各系統又包括很多設備。由于船載測控系統具有工作范圍廣、系統龐大、結構層次多、子系統模型多樣、相互關聯復雜、系統元素多等特點,科學、有效、準確地評估出測控系統的綜合效能,使測控系統的效能在航天發射試驗中得到合理的體現,是提高測量船整體測控能力的一個重要環節。在以往的效能評估系統中所建立的指標體系往往建成后就不可更改,指標相互間層次關系固定、權重值確定,無法靈活變化。而在實際應用時,由于每次任務的參試設備不同、不同時間點參與實時工作的設備數不同等原因,需要對測控系統的評估指標體系進行靈活的管理。當根據不同測控任務對測控系統進行分析、計劃、調整、配置時,就需要確定各個指標的重要性,并研究整個系統的綜合效能值。此外,由于測量船各系統之間相互關系的復雜性,構建模型所需考慮的要素急劇增加,要素之間的相互關聯復雜,這種復雜性給建立評估模型帶來困難。
本文將工作結構分解(Work Breakdown Structure, WBS)引入船載測控系統效能評估中。WBS是指通過對項目總目標和總任務的研究,采用系統分析方法將項目系統總范圍分解為許多互相聯系、互相影響、互相依賴的項目單元,以這些項目單元作為項目管理的對象,滿足項目設計、計劃、控制和運行管理的需要[1]。采用WBS方法將總測控任務分解成多個相互聯系、相互依賴的子任務,子任務采用ADC效能模型進行評估,用層次分析法(Analytic Hierarchy Process,AHP)計算子任務權重,并根據評估時間采樣點的子任務分布情況進行權重的動態賦值,最后計算得到系統效能動態評估值。該方法不僅降低了船載測控系統效能評估建模的復雜度,也克服了傳統ADC效能模型不能體現效能與時間的變化關系的不足。
1 測控總任務的WBS建模
1.1 船載測控系統效能定義
系統效能是系統在規定的條件下和規定的時間內,滿足一組特別任務要求的程度[2]。船載測控系統效能可定義為規定的條件下和規定的時間內滿足特定航天測控任務要求的程度,它是根據測控任務的不同,隨著裝備的組成、任務使命、任務環境、任務方案、時間等因素而變化的。
規定的條件根據測控任務不同而不同,涉及到海況、人員、設備狀態等諸多因素。規定的時間為完成一次測控任務的時間周期。測量船在三大洋執行測控任務,執行一次任務從啟航到返回碼頭的時間最短20多天,長則2~3個月,測控時間根據任務要求而不同。進行效能評估時,可根據需要設定評估的時間長度,典型的可分為長周期和短周期。長周期是指從測量船出航到完成測控任務返回碼頭的一次完整任務周期。短周期是指測量船在任務指定海域的測控任務實戰周期,即從航天器發射前實時任務準備到完成全部實時測控任務要求的時間周期。特定的航天測控任務是在某次航天飛行試驗中上級給測量船下達的測控任務總要求。
1.2WBS模型結構
海上航天測控任務是一項系統工程,需要各系統完成各自的規定任務并實現配合。WBS工作分解結構作為系統工程管理中最重要的部分之一,屬于系統分析和控制工具,它在全局上對整個系統研發過程進行調節和控制[3]。本文將測量船一次特定的航天測控任務要求定義為效能評估的總任務要求,采用WBS技術將總任務分解為不同粒度的子任務。WBS模型結構分為任務結構分解和活動結構分解。
1.2.1 任務結構分解
按照測量船的設備組成、工作原理和測控要求,將總任務分解成互相獨立、互相影響、互相聯系的子任務單元。任務結構分解遵循以下原則:(1)采用樹形結構;(2)將總任務逐步細化分解,最底層的子任務可直接分派到最小設備單元去完成,每個任務原則上要求分解到不能再細分為止;(3)某項子任務應且只應在WBS總任務中的一個地方出現;(4)WBS中某項任務的內容可以是其下所有WBS子任務項的總和。
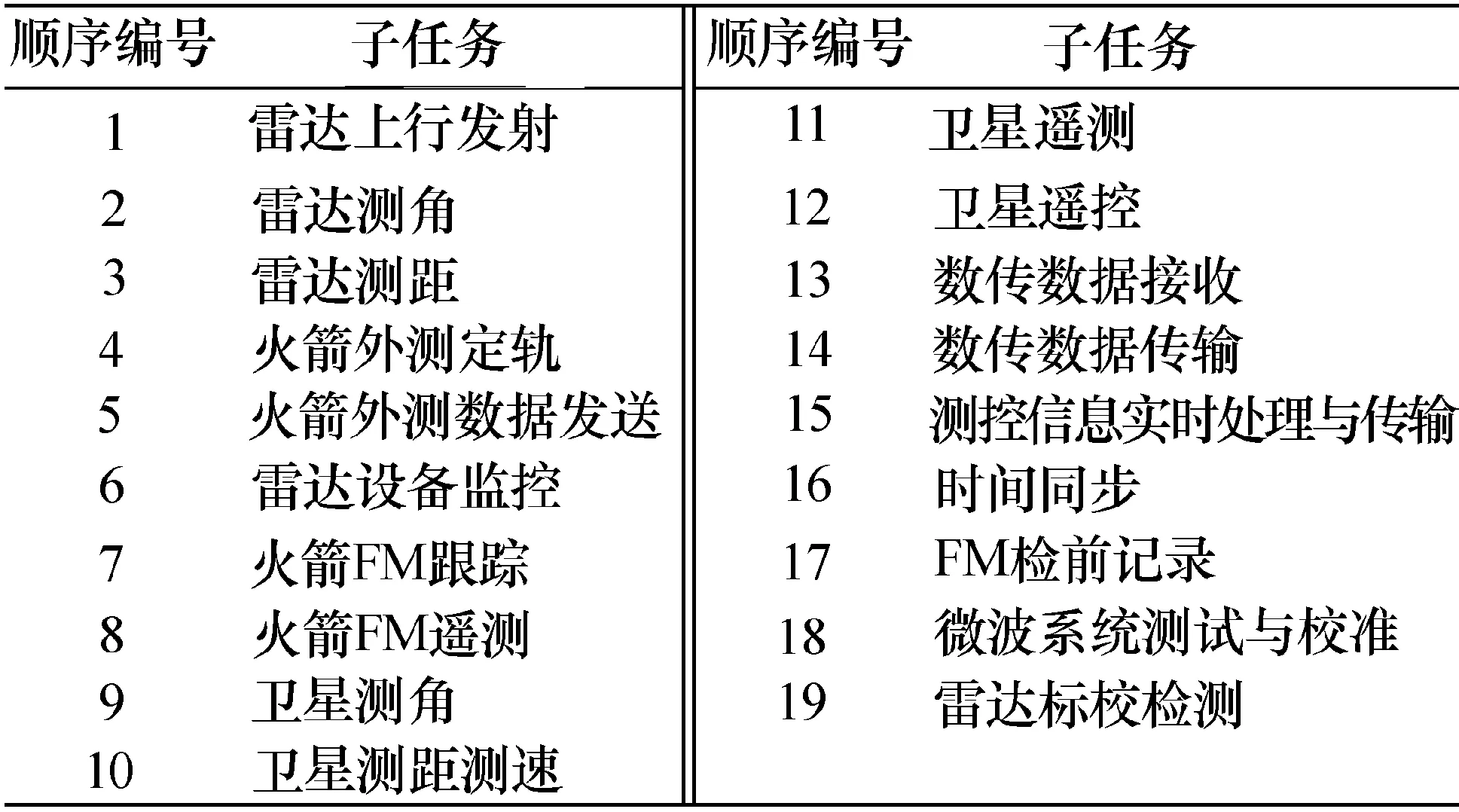
以一次典型衛星測控任務為例,要求測量船完成對火箭的遙測、外測和衛星的遙測、遙控、測軌、數傳任務。該總任務可分解為19個子任務,按1~19順序編號,如表1所示。19個子任務為樹形結構中的同一層。每個子任務需要若干設備或分系統共同完成。
表1WBS任務結構分解
1.2.2 活動結構分解
活動結構分解是在時間邏輯上集成所有的關鍵因素,包含臨時的里程碑和監控點,建立各子任務在時間軸上的前、后置關系圖。上述典型任務的活動結構分解如圖1所示。
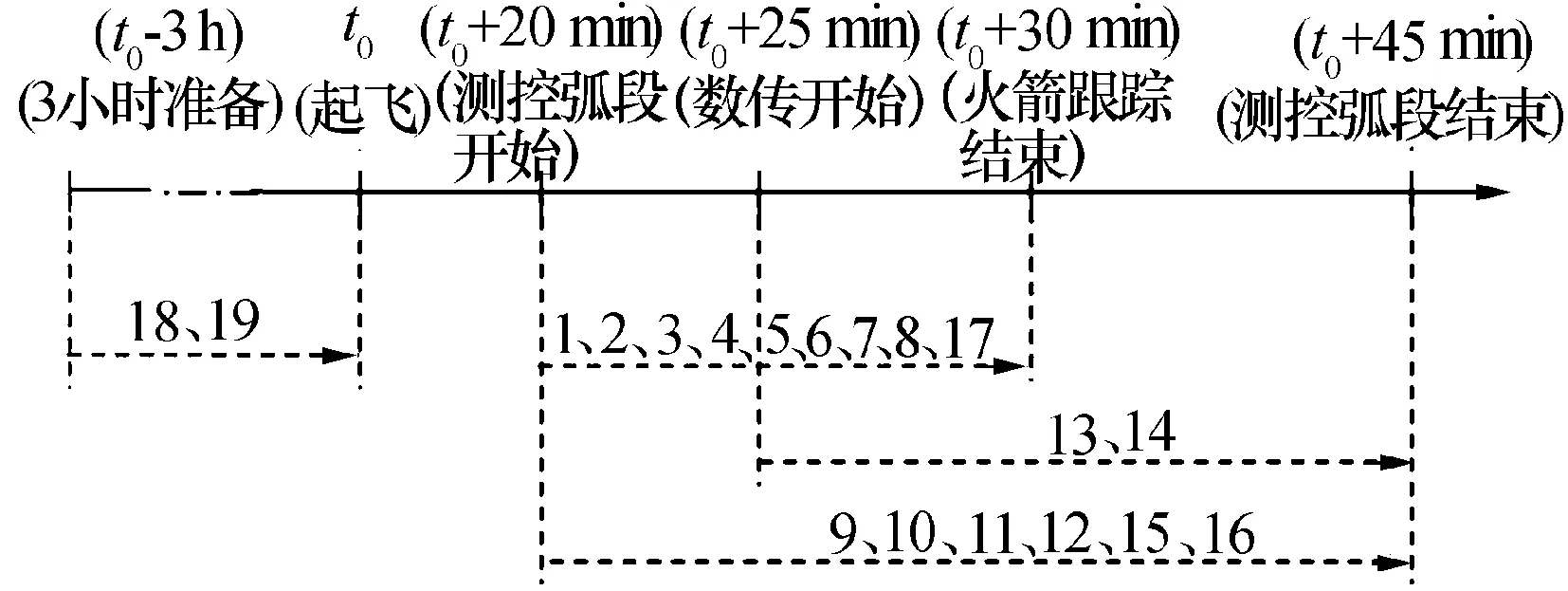
圖1 WBS活動結構分解
2 基于ADC模型的子任務效能評估
2.1 子任務設備結構模型
根據設備的工作原理、信息邏輯關系,建立各子任務的設備結構模型。建模原則:根據工作信號邏輯關系順序,設備并行工作時為并聯關系,串行工作則為串聯關系,雙機熱備份的設備為并聯關系。以重點關注無線電測控系統的設備結構分解為例,中心計算機、海航系統、船舶動力系統采用黑箱模型,火箭外測定軌任務的子任務設備結構模型如圖2所示。

圖2 火箭外測定軌子任務結構模型
2.2 基于ADC模型的子任務效能評估
子任務是由相對簡單的設備子系統完成的,因此子任務的效能評估采用傳統的ADC模型[4]為
E=A·D·C
(1)
式中:E為系統效能,是系統滿足一組特定任務要求程度的度量;A為可用度向量,是開始執行任務時系統狀態的度量;D為可信賴矩陣,是對系統在任務過程中t時刻的狀態度量;C為固有能力向量,是已知系統在任務過程中t時刻狀態的情況下,系統完成任務的概率。
1)可用度向量A
可根據設備串并聯關系及各設備狀態確定子任務系統的狀態數,并對某些同類狀態進行合并簡化。假如一個串并聯系統最終有n種狀態,則其可用度向量為
A=[a1a2…an]
(2)
對于不同的子任務設備組成方式,其可用度向量的階數不完全一樣,計算可用度向量的關鍵點就是找出系統的不同狀態數。
2)可信賴性矩陣D(t)

(3)
其中,dij(t)是系統初始狀態處于狀態i,在t時刻轉移到狀態j的概率。
D(t)的求解與轉移概率矩陣P有很大關系,具體求解方法:首先確定系統的狀態,構建系統的狀態轉移矩陣P;然后求解微分
(4)
式中:U=[PT-1],PT是系統轉移概率矩陣P的轉置矩陣;q(t)是一列向量,它的每個元素qi(t)表示在時間t系統處于狀態Xi的概率。將初始條件代入通解中,得到n個特解,寫成矩陣形式得到系統的可信賴性矩陣D(t)
D(t)=[d1(t)d2(t) …dn(t)]T
(5)
3)能力向量C
C=[c1c2…cn]T
(6)
式中:cj(j=1,2,…,n)是系統在任務過程中t時刻處于狀態j時完成任務的概率。
分析船載測控系統組成及所承擔的任務,建立體現測控能力的示例評價指標體系。該指標體系分為多級,一級指標有船舶機動能力、氣象保障能力、軌道測量能力、遙測遙控能力、數據處理能力、指揮顯示能力、通信服務能力等。每個一級指標下還可分為二級、三級或更多的性能評價指標。建立評價指標體系后,對于每一個子任務能力向量C可采用AHP法進行計算。由專家打分給出每項性能指標下的指標值μ(Xi)以及相應的權重值ωi后,按理想點法進行綜合評價計算。例如,如果某個子任務的設備狀態可合并為狀態完好、輕微受損、系統故障3種狀態,則可給出系統在完好狀態下的能力向量值
(7)
系統故障狀態下的能力向量C3=0,輕微受損狀態下的能力向量C2=1-C1[5]。
3 子任務動態權重計算及綜合效能評估
3.1 子任務權重計算
采用WBS技術進行任務分解后,需要確定各子任務相對于總任務要求的權重,權重反映各子任務相互之間重要性的差異。本文采用AHP法計算子任務權重, 根據專家小組兩兩比較每個子任務對總任務的相對重要性,構建判斷矩陣A;再通過求解判斷矩陣的特征值得出子任務的權重向量ωi;最后,進行一致性檢驗。
(8)
式中:CR為判斷矩陣隨機一致性指標;λmax為判斷矩陣A的最大特征值;RI為平均隨機一致性指標,其隨n取值的不同而變化;n為矩陣階數。

3.2 子任務權重動態賦值及總效能計算
測量船執行測控任務具有鮮明的時變特性,船載測控系統的效能函數應是隨時間變化的函數。為了體現效能函數與時間的關系,應該在每個時間點根據系統的不同狀態計算該時刻的效能函數。例如,對于上述示例的19個子任務,每個子任務執行的起始時間是不同的。在效能評估的某個時間采樣點不一定所有子任務都在執行,故需要根據采樣點的子任務分布情況重新進行權重賦值。假設某個時間點ta落在m(m≤19)個子任務的時間區間內,即該時間點有m個子任務在執行,則該采樣點各子任務的權重需按如下方法重新計算。ωi(i=1,2,…,m)為第i個子任務的原權重,新的子任務權重總和為
(9)

(10)
船載測控系統在該時間點的總效能為

(11)
式中:g(ta)為船載測控系統的總效能函數;fi(ta)為第i個子任務的效能函數。
4 基于WBS和AHP權重動態賦值的效能評估仿真
基于WBS和AHP權重動態賦值的總效能評估結果為周期時間內完成任務能力程度的概率曲線,完整評估步驟如下:
1)對總任務進行WBS分解,建立子任務結構模型。
2)根據各子任務的A、D、C矩陣,計算得到各子任務的效能函數曲線。
3)根據全部子任務起始時間的最小值和終止時間的最大值確定評估時間周期。
4)對于每一個評估采樣時間點,依次判斷該時間點是否落在各子任務的時間區間內。如果在子任務時間區間內,通過對應的系統效能函數計算該子任務在此時間點的效能值并讀取該子任務的權重;反之,則跳過計算和讀取過程。
5)按照采樣點的子任務分布情況,根據式(9)~式(11),對子任務權重進行重新賦值,并計算得到系統總效能函數曲線。
對于上述典型衛星測控任務示例,按照實時測控的短周期進行效能評估,時間周期從衛星發射前3 h準備到測量船實時測控任務結束。根據測控任務的規定時間要求以及關鍵測控事件的時間邏輯關系,確定各子任務的起始時間和終止時間,取所有子任務起始時間的最小值和所有終止時間的最大值,得到評估的采樣時間區間。算例中,衛星發射t0前3 h為起始時間,即t0-3 h。測量船實時測控任務結束時間為評估終止時間。對于火箭主動段,測量船大約在起飛20 min后發現目標并開始測量,火箭外測和遙測時間約為10 min。因此,火箭測量任務起始時間設定t0+20 min,終止時間設定為t0+30 min,星箭分離后對衛星跟蹤時間假設為15 min,跟蹤結束時間設定為t0+45 min。
若評估仿真區間從火箭跟蹤開始到衛星測控結束,即(t0+20 m)~(t0+45 m),仿真采樣步長為0.5 min,船載測控系統效能評估仿真曲線如圖3所示。
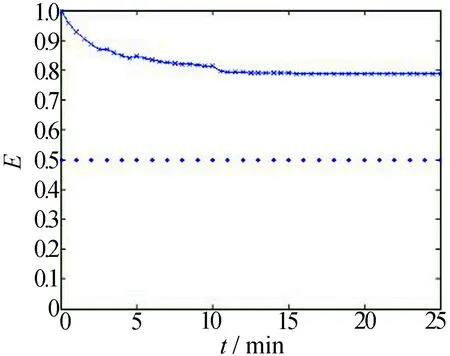
圖3 某次任務短周期效能評估仿真曲線
從評估結果的效能曲線可知,完成此次測控任務的程度概率大于0.79。在t=3min(即t0+23min)和t=5 min(即t0+25 min)時刻,總效能明顯有所提高,此后又明顯開始下降,說明在這兩個時刻有效能較高的新的子任務開始執行,提高了系統的總體效能;在t=10.5 min時刻,總效能明顯下降,說明在該時間點,有效能較高的子任務執行完畢,導致總體效能略微下降。根據效能曲線的變化情況,科研人員可以分析檢查引起總效能降低的子任務所對應的設備狀態,發現薄弱環節,為設備維護管理提供依據。
5 結束語
對于復雜大系統的效能評估,通過WBS分解可以降低評估對象模型的復雜度,對AHP法權重的動態賦值能充分體現效能函數的時變特性,克服了傳統ADC效能量化模型的不足。本文建立的方法,不僅可應用于船載測控系統綜合效能評估,為科研人員掌握測量船綜合測控能力提供依據,也適用于其他復雜裝備系統的效能評估。
[1] 賈 錦, 鄧家褆, 何 恒. 系統工程中WBS建模與實現的研究[J]. 中國制造業信息化,2007,36(7): 5-9. Jia Jin, Deng Jiati, He Heng. Research on the process of resoruce allocation evaluation and system realization[J]. Manufacture Information Engineering of China, 2007, 36(7): 5-9.
[2] GJB451A-2005. 可靠性維修性保障性術語[S]. 北京:總裝備部軍標出版發行部,2005. GJB451A-2005. Reliability maintainablity and supportablity of the term[S]. Beijing: General Equipment Department Military Standard Press, 2005.
[3] 高 星, 成 虎. 基于技術——行為系統的WBS改進方法研究[J]. 建筑管理現代化,2004(6): 5-8. Gao Xing, Cheng Hu. An improved WBS method based on technology of behavior system[J]. Construction Management Modrnization, 2004(6): 5-8.
[4] 張 杰,唐 宏,蘇 凱,等. 效能評估方法研究[M]. 北京:國防工業出版社,2009. Zhang Jie, Tang Hong, Su Kai, et al. Methods of effectiveness eualuation[M]. Beijing: National Defense Industry Press, 2009.
[5] 孔建壽,穆育強,戴躍偉,等. C3I系統生存能力的機動性能建模與仿真[J]. 南京理工大學學報:自然科學版,2008,32(6): 733-737. Kong Jianshou, Mu Yuqiang, Dai Yuewei, et al. Mechanization capacity modeling and simulation for C3I system survivability[J]. Journal of Nanjing University of Science and Technology: Nature Science, 2008, 32(6): 733-737.
楊奕飛 女,1971年生,教授。研究方向為復雜系統評價、海洋工程裝備自動化。
李少華 男,1987年生,碩士研究生。研究方向為系統效能評估。
戴躍偉 男,1962年生,教授。研究方向為網絡與多媒體信息安全、系統評價。
A Study on Effectiveness Evaluation of Ship-borne TT & C System Based on WBS
YANG Yifei1,2,LI Shaohua2,DAI Yuewei1,2,KONG Jianshou1,LING Xiaodong3
(1. School of Automation, Nanjing University of Technology, Nanjing 210094, China) (2. School of Electronics and Information, Jiangsu University of Science and Technology, Zhenjiang 212003, China) (3. Joint Laboratory of Ocean-based Flight Vehicle Measurement and Control, Jiangying 214331, China)
A method of effectiveness evaluation based on WBS is proposed in this paper. According to the working principle, signal process and task requirement of ship-borne TT&C system, the model of work breakdown structure is established, and the activity structure decomposition model is established according to time logical order of subtasks. The evaluation of subtask effectiveness is based on ADC model. The weight of subtask is calculated using AHP method. Different subtask is executed on different time interval, the weight of subtask should be calculated dynamically on every point. The time function curve can describe dynamic change of the effectiveness. Finally,an application example is given, and the results show that the method is reasonable and effective.
TT&C system; effectiveness evaluation; work breakdown structure
10.16592/ j.cnki.1004-7859.2015.09.003
飛行器海上測量與控制聯合實驗室開放基金資助項目(FORM2014OF003)
楊奕飛 Email:seayyf@163.com
2015-04-27
2015-07-21
TN956;N
A
1004-7859(2015)09-0013-05
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19