基于碰撞航線的動(dòng)能攔截器滑模制導(dǎo)律設(shè)計(jì)
2015-03-19 08:24:58楊旭張皎劉源翔
北京航空航天大學(xué)學(xué)報(bào) 2015年11期
關(guān)鍵詞:設(shè)計(jì)
楊旭,張皎,劉源翔
(北京理工大學(xué) 宇航學(xué)院,北京 100081)
動(dòng)能攔截器(Kinetic Kill Vehicle,KKV)作為一種大氣層外高速飛行器,利用高速飛行產(chǎn)生的巨大動(dòng)能,通過(guò)直接碰撞摧毀來(lái)襲目標(biāo).與傳統(tǒng)大氣層內(nèi)制導(dǎo)武器相比,動(dòng)能攔截器采用直接力控制彈體姿態(tài),以實(shí)現(xiàn)精準(zhǔn)攔截.因此制導(dǎo)律的設(shè)計(jì)是動(dòng)能武器實(shí)現(xiàn)精確攔截的關(guān)鍵[1].
關(guān)于制導(dǎo)律國(guó)內(nèi)外開(kāi)展了大量的研究.其中應(yīng)用最為廣泛的是比例導(dǎo)引(proportional navigation),其控制方式是令導(dǎo)彈加速度指令與彈目相對(duì)速度及視線角速率成比例[2].但當(dāng)目標(biāo)做大機(jī)動(dòng)飛行時(shí),比例導(dǎo)引難以保證準(zhǔn)確命中目標(biāo).文獻(xiàn)[3]提出了一種真比例制導(dǎo)率,通過(guò)控制導(dǎo)彈垂直于視線方向的加速度大小補(bǔ)償目標(biāo)機(jī)動(dòng),達(dá)到了減小脫靶量的效果.谷志軍和陳磊[4]針對(duì)動(dòng)能攔截器順軌攔截問(wèn)題設(shè)計(jì)了一種比例導(dǎo)引律降低了導(dǎo)彈的需用過(guò)載,但該方法僅適用于導(dǎo)彈速度大于目標(biāo)速度的情況.
隨著控制理論的研究深入,許多學(xué)者提出了基于現(xiàn)代控制理論的制導(dǎo)律設(shè)計(jì)方法.如最優(yōu)制導(dǎo) 律[5-7],滑 模 制 導(dǎo) 律[8-11],backstepping 制 導(dǎo)律[12-13],動(dòng)態(tài)面制導(dǎo)律[14-15]等.李浩和佘浩平[6]以彈目相對(duì)位置及相對(duì)速度為約束,設(shè)計(jì)了一種彈道成型的最優(yōu)制導(dǎo)律.Indig等[7]利用最優(yōu)控制理論,提出了一種改進(jìn)比例制導(dǎo)律.朱戰(zhàn)霞等[1]利用終端滑模理論設(shè)計(jì)了適用于動(dòng)能攔截器的末段制導(dǎo)律,通過(guò)在滑模面的設(shè)計(jì)中引入非線性函數(shù),使得跟蹤誤差在有限時(shí)間快速收斂到零,但在初始階段該方法的需用過(guò)載偏大.張運(yùn)喜等[8]提出了一種基于有限時(shí)間收斂的滑模變結(jié)構(gòu)制導(dǎo)律,實(shí)現(xiàn)了制導(dǎo)系統(tǒng)的視線角速率快速收斂到零,由于該制導(dǎo)律針對(duì)的是地面固定目標(biāo),故并未考慮目標(biāo)機(jī)動(dòng).Rao和 Ghose[10]針對(duì)目標(biāo)機(jī)動(dòng)設(shè)計(jì)了一種新型滑模變結(jié)構(gòu)制導(dǎo)律,該制導(dǎo)律將目標(biāo)的加速度及加速度的導(dǎo)數(shù)視為未知有界變量,并在控制量設(shè)計(jì)中對(duì)其補(bǔ)償.但該方法容易令導(dǎo)彈需求的法向過(guò)載過(guò)大,并產(chǎn)生高頻抖振現(xiàn)象.刁兆師和單家元[13]利用backstepping的思想,設(shè)計(jì)了一種考慮自動(dòng)駕駛儀動(dòng)態(tài)特性并含有攻擊角約束的制導(dǎo)律,但該方法會(huì)導(dǎo)致微分膨脹.為解決微分膨脹問(wèn)題Qu和Zhou[14]考慮導(dǎo)彈自動(dòng)駕駛儀二階動(dòng)態(tài)特性,設(shè)計(jì)了一種基于動(dòng)態(tài)面理論的制導(dǎo)律.
在實(shí)際應(yīng)用中,由于系統(tǒng)的某些狀態(tài)量及目標(biāo)某些參數(shù)難以測(cè)量,故對(duì)設(shè)計(jì)制導(dǎo)律所需要的未知量的估計(jì)顯得尤為重要.Zarchan[16]和Shima等[17]分別利用卡爾曼濾波(KF)及擴(kuò)展卡爾曼濾波(EKF)的方法對(duì)系統(tǒng)的狀態(tài)量及目標(biāo)的參數(shù)進(jìn)行估計(jì).Zhu等[18]利用擴(kuò)張狀態(tài)觀測(cè)器(ESO)對(duì)目標(biāo)的加速度實(shí)時(shí)估計(jì),并利用滑模控制理論設(shè)計(jì)了一種變結(jié)構(gòu)制導(dǎo)律.Zhang等[19]利用積分滑模控制方法設(shè)計(jì)制導(dǎo)律,并將目標(biāo)的機(jī)動(dòng)視為有界干擾并通過(guò)非線性干擾觀測(cè)器對(duì)其實(shí)時(shí)估計(jì),通過(guò)控制視線角速率有限時(shí)間趨近于零從而命中目標(biāo).
綜上所述,在攔截打擊目標(biāo)時(shí),大多是針對(duì)導(dǎo)彈速度大小恒定,通過(guò)控制彈目視線角速率有限時(shí)間收斂至零為目標(biāo)設(shè)計(jì)的制導(dǎo)律.而這種方式使導(dǎo)彈以曲線彈道實(shí)現(xiàn)對(duì)目標(biāo)的攔截,同時(shí)對(duì)于動(dòng)能攔截武器也難以獲得最大的碰撞速度.
針對(duì)動(dòng)能攔截器軸向加速度不為零的情況,本文設(shè)計(jì)了一種基于碰撞航線(collision course)的滑模制導(dǎo)律.該制導(dǎo)律的核心思想,即利用姿態(tài)控制發(fā)動(dòng)機(jī)瞬間改變彈體姿態(tài),產(chǎn)生用于改變速度方向的需用法向過(guò)載,使導(dǎo)彈的速度矢量始終指向預(yù)期的碰撞點(diǎn),直至完成對(duì)目標(biāo)的攔截.在制導(dǎo)律設(shè)計(jì)過(guò)程中,將未知的目標(biāo)機(jī)動(dòng)視為有界干擾,利用非線性干擾觀測(cè)器(NDO)對(duì)其實(shí)時(shí)估計(jì),并把估計(jì)值用于對(duì)目標(biāo)機(jī)動(dòng)的補(bǔ)償,實(shí)現(xiàn)對(duì)目標(biāo)的精確打擊.
1 彈目相對(duì)運(yùn)動(dòng)模型
目標(biāo)的攔截問(wèn)題,通過(guò)合理的解耦,可以將三維問(wèn)題轉(zhuǎn)化為兩個(gè)相互垂直平面內(nèi)的二維問(wèn)題,分別在兩平面內(nèi)獨(dú)立設(shè)計(jì)對(duì)應(yīng)的制導(dǎo)律.為研究方便,本文選擇在縱向平面場(chǎng)景內(nèi)研究.圖1描述了導(dǎo)彈與目標(biāo)在笛卡兒慣性坐標(biāo)系Oxy下的相對(duì)運(yùn)動(dòng)關(guān)系.分別定義導(dǎo)彈M和目標(biāo)T各參數(shù)變量的下標(biāo)為m和t.
為了簡(jiǎn)化問(wèn)題,假設(shè)導(dǎo)彈和目標(biāo)均為質(zhì)點(diǎn),忽略導(dǎo)彈和目標(biāo)所受重力,且導(dǎo)彈的自動(dòng)駕駛儀及姿態(tài)控制系統(tǒng)均具有理想動(dòng)態(tài)特性.在極坐標(biāo)系下彈目的相對(duì)運(yùn)動(dòng)學(xué)方程為
圖1 彈目攔截幾何Fig.1 Missile and target engagement geometry

假設(shè)導(dǎo)彈可以通過(guò)火箭發(fā)動(dòng)機(jī)獲得沿彈軸方向恒定的加速度,忽略推力偏心.且能夠通過(guò)推力矢量發(fā)動(dòng)機(jī)實(shí)時(shí)改變彈體姿態(tài)即改變彈體的攻角α,從而使沿彈軸的加速度am可以指向需求的方向,則導(dǎo)彈速度的變化率和航跡角變化率滿足如下關(guān)系:

為方便研究,假定目標(biāo)運(yùn)動(dòng)速度Vt恒定且其加速度at的方向始終垂直于速度的方向,滿足如下關(guān)系:

2 基于碰撞航線的制導(dǎo)律設(shè)計(jì)
在本節(jié)中,設(shè)計(jì)一種基于碰撞航線的制導(dǎo)律,使攔截器能夠沿平直彈道運(yùn)動(dòng)至預(yù)期的碰撞點(diǎn).
當(dāng)導(dǎo)彈與目標(biāo)處于碰撞航線上時(shí),同一時(shí)間內(nèi)導(dǎo)彈與目標(biāo)在垂直于視線方向的運(yùn)動(dòng)距離相同,則存在如下關(guān)系:

假設(shè)導(dǎo)彈加速度am的值恒定,且目標(biāo)做非機(jī)動(dòng)勻速運(yùn)動(dòng),整理式(8)有

式中:tgo(time-to-go)為從當(dāng)前時(shí)刻至完成攔截所需要的時(shí)間.當(dāng)導(dǎo)彈與目標(biāo)處于并保持在碰撞三角形航線上運(yùn)動(dòng)時(shí),存在如下關(guān)系[20]:

對(duì)tgo求導(dǎo)有


式中:θmr為導(dǎo)彈保持碰撞航線所需 θm的值;為導(dǎo)彈沿碰撞航線運(yùn)動(dòng)的平均速度,其導(dǎo)數(shù)為

為實(shí)現(xiàn)跟蹤誤差的收斂,本文利用滑模控制理論來(lái)進(jìn)行制導(dǎo)律的設(shè)計(jì).選取滑模面S=x根據(jù)滑模運(yùn)動(dòng)可達(dá)性條件選擇如下趨近律:

式中:k>0,σ >0,0<η <1.顯然式(15)所描述的趨近律能夠使系統(tǒng)的狀態(tài)量在有限時(shí)間內(nèi)從初值收斂到S的鄰域內(nèi).

從式(17)可以看到,目標(biāo)的加速度出現(xiàn)在控制量中.由于實(shí)際導(dǎo)彈攔截中,目標(biāo)的加速度難以直接測(cè)量,因此采用NDO對(duì)目標(biāo)的加速度進(jìn)行估計(jì).
引理1[21]考慮如下單輸入單輸出(SISO)非線性系統(tǒng):

式中:ψ為系統(tǒng)的狀態(tài)量;u∈R為充分光滑的系統(tǒng)輸入;g(t)為充分光滑的不確定函數(shù).
定理1[22]考慮上述非線性系統(tǒng)(18),假設(shè)u和ψ可測(cè),g(t)有界且存在Lipschitz常數(shù)L>0使得,則有如下觀測(cè)器:
假設(shè)參數(shù)λi足夠大的,并忽略輸入噪聲,系統(tǒng)的狀態(tài)量及干擾的估計(jì)值將有限時(shí)間收斂,即
式(19)中參數(shù)λi的選取方法可參考文獻(xiàn)[23],隨著λi的增大,觀測(cè)器的收斂速度加快,但觀測(cè)誤差將增大,同時(shí)對(duì)噪聲更加敏感,降低了觀測(cè)器的估計(jì)性能.因此,需要在仿真和實(shí)際應(yīng)用中合理地選取λi的值.
對(duì)式(2)求導(dǎo)得

式中:atλ=atcosθt為目標(biāo)垂直于視線方向的加速度.設(shè)計(jì)觀測(cè)器如下:
文獻(xiàn)[23]給出了NDO的穩(wěn)定性證明.假設(shè)Vλ,Vr,r,γm,λ 可測(cè),且目標(biāo)法向加速度 at有界,則,其中分別為目標(biāo)加速度及其導(dǎo)數(shù)的上界[21].由定理1可知觀測(cè)器參數(shù),并通過(guò)合理地選擇 λ0,λ1,NDO的觀測(cè)誤差e=a^t-at將趨近于零,則z0和z1分別收斂于 Vλ和 -atλ.
目標(biāo)加速度at的估計(jì)值可表示為cosθt.聯(lián)立式(17)和式(21),基于碰撞航線的導(dǎo)彈滑模制導(dǎo)律(NDOGC)虛擬控制量為

3 穩(wěn)定性分析
考慮如下非線性系統(tǒng)[24]:

式中:f:U×R→Rn在U×R連續(xù);U為原點(diǎn)x=0的一個(gè)開(kāi)鄰域.
定理2 對(duì)于系統(tǒng)(23),給定任意初始時(shí)刻t0的初始狀態(tài)x(t0)=x0∈U,存在一個(gè)依賴(lài)于x0的收斂時(shí)間T≥0,使系統(tǒng)方程以x0為初始狀態(tài)的解x(t)有定義,且有

當(dāng) t∈[t0,T(x0)),φ(t;t0,x0)∈U{0},那么系統(tǒng)的平衡點(diǎn)x=0是局部有限時(shí)間收斂的,如果U=Rn,則平衡點(diǎn)是全局有限時(shí)間收斂的.
引理2[24]考慮式(23)所描述的非線性系統(tǒng),假設(shè)V(x)是定義在原點(diǎn)的鄰域U?R的C1光滑正定函數(shù).存在實(shí)數(shù)1>β>0及ρ>0,使得)是定義域U?R的半負(fù)定函數(shù),則存在定義域U0?U?R,使得定義在U0?R上的任意V(x)均能以有限時(shí)間收斂至原點(diǎn).若Tr為V(x)收斂至零的時(shí)間,則

式中:x0為原點(diǎn)x=0某一開(kāi)鄰域中的任何一點(diǎn).如果U0=Rn且V(x)是徑向無(wú)界的(V(x)→+∞,當(dāng),那么系統(tǒng)(23)的原點(diǎn)是全局有限時(shí)間收斂的.
定義如下的Lyapunov函數(shù):

由式(26)對(duì)時(shí)間t求導(dǎo)可得


式中:0<δ0<1.函數(shù) V收斂至零的時(shí)間滿足式(30):

式中:S0為S的初值.
參數(shù)k,σ能夠保證當(dāng)滑模面S較大時(shí),系統(tǒng)狀態(tài)量能以較大的速度趨近于滑動(dòng)模態(tài),且隨k,σ增大系統(tǒng)有限時(shí)間收斂性越好,S的收斂速度越快.但過(guò)大的k,σ會(huì)導(dǎo)致系統(tǒng)的控制量過(guò)大,并產(chǎn)生抖振.通過(guò)調(diào)整參數(shù)η的值,可保證系統(tǒng)狀態(tài)量遠(yuǎn)離滑動(dòng)模態(tài)(S較大)時(shí),能以較大的速度趨近于滑動(dòng)模態(tài),當(dāng)系統(tǒng)狀態(tài)量趨近滑動(dòng)模態(tài)(S較小)時(shí),保證較小的控制增益,以降低抖振.
4 仿真結(jié)果及分析
導(dǎo)彈在慣性坐標(biāo)系中的初始位置為xm(0)=50000m,ym(0)=0m,目標(biāo)的初始位置為xt(0)=yt(0)=0 m.導(dǎo)彈的初始航跡角 γm0∈[90°,160°],目標(biāo)的初始航跡角 γt0∈[0°,90°],導(dǎo)彈的加速度am=20 g.
由于式(22)中的符號(hào)函數(shù)sgn(S)會(huì)導(dǎo)致控制量的抖振,從而導(dǎo)致制導(dǎo)精度下降.選擇Sigmod函數(shù)代替,表達(dá)式為
式中:ε為邊界層;參數(shù) a為幅值增益可調(diào)節(jié)sig(S,a,b)函數(shù)的幅值;參數(shù)b為指數(shù)因子可調(diào)節(jié)sig(S,a,b)函數(shù)的近似線性區(qū)間的范圍.本文選取的參數(shù)分別為 a=2,b=40,ε =0.2.

基于有限時(shí)間收斂理論設(shè)計(jì)的制導(dǎo)律(FTCG)是以零化視線角速率為目標(biāo)設(shè)計(jì)的,本文利用FTCG與NDOGC相對(duì)比,分析兩類(lèi)制導(dǎo)律的不同.FTCG采用如下形式[9]:

式中:N為大于2的常數(shù);μ>0;0≤n<1;f為目標(biāo)加速的上界.
兩種制導(dǎo)律相關(guān)參數(shù)分別為k=3,σ=5,η=0.5,L=80,λ0=1.5,λ1=1.1,N=10,μ =1.5,n=0.5,f=80.
4.1 攔截非機(jī)動(dòng)目標(biāo)
選取導(dǎo)彈和目標(biāo)的初始航向角分別為γm0=160°和γt0=20°,導(dǎo)彈和目標(biāo)的初始速度分別為Vm0=1 500m/s和 Vt0=3 000 m/s,仿真結(jié)果如圖2、圖3所示.
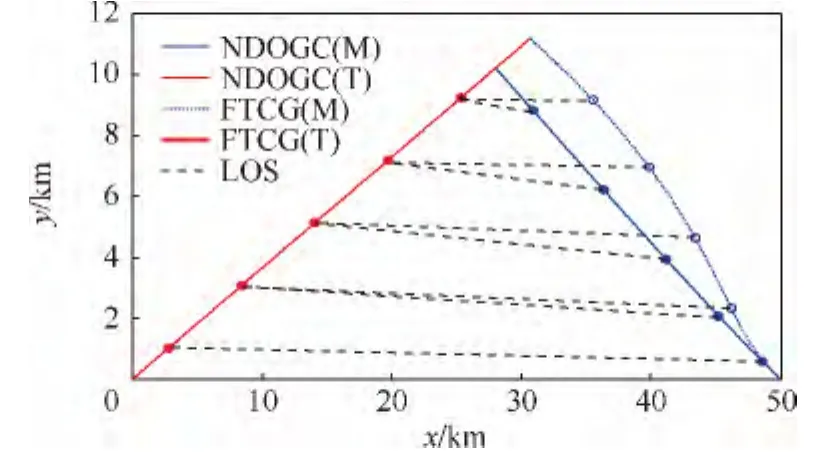
圖2 導(dǎo)彈和非機(jī)動(dòng)目標(biāo)相對(duì)運(yùn)動(dòng)軌跡Fig.2 Trajectories of missile and nonmaneuvering target relative motion
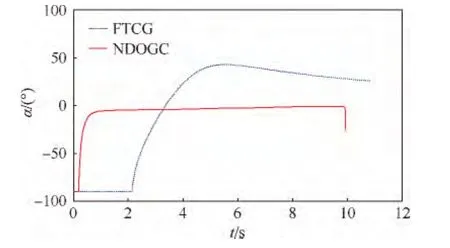
圖3 導(dǎo)彈和非機(jī)動(dòng)目標(biāo)的攻角變化Fig.3 Variation of angle of attack for missile and nonmaneuvering target
在NODGC制導(dǎo)律的作用下,導(dǎo)彈命中目標(biāo)需要9.94 s,脫靶量為0.18m,命中時(shí)刻導(dǎo)彈的速度為3431.3m/s,對(duì)于FTCG制導(dǎo)律,命中目標(biāo)需要10.87 s,脫靶量為 0.38m,命中時(shí)刻的速度為2942.8m/s.
從仿真結(jié)果可以看出,兩種制導(dǎo)律都可以有效地命中目標(biāo).從圖2可以看出,在NDOGC制導(dǎo)律的作用下,導(dǎo)彈的速度方向始終指向碰撞點(diǎn),運(yùn)動(dòng)軌跡近似一條直線.在制導(dǎo)律FTCG的作用下,導(dǎo)彈通過(guò)改變航跡角使視線角速率趨近于零,這種方式迫使導(dǎo)彈以曲線運(yùn)動(dòng)軌跡命中目標(biāo).從圖3可以看出,導(dǎo)彈在NDOGC制導(dǎo)律的作用下,消除了初始航向誤差后,攻角近似為零,使導(dǎo)彈獲得更高的命中速度,這對(duì)提高動(dòng)能攔截器的殺傷效果是非常重要的.對(duì)比制導(dǎo)律FTCG,為保持視線角速率趨近于零需要不斷地調(diào)整導(dǎo)彈的攻角并最終收斂于常值,直至命中目標(biāo).這說(shuō)明導(dǎo)彈的加速度方向與速度方向不重合,難以充分利用導(dǎo)彈的加速度提高自身動(dòng)能.
4.2 攔截機(jī)動(dòng)目標(biāo)
選取導(dǎo)彈和目標(biāo)的初始航向角分別為γm0=160°和γt0=20°,導(dǎo)彈和目標(biāo)的初始速度分別為Vm0=1 500m/s和Vt0=3 000m/s,目標(biāo)以加速度at=8 g sin(0.5t)做正弦機(jī)動(dòng).仿真結(jié)果如圖4、圖5所示.

圖4 導(dǎo)彈和機(jī)動(dòng)目標(biāo)相對(duì)運(yùn)動(dòng)軌跡Fig.4 Trajectories of missile and maneuvering target relative motion
圖5 導(dǎo)彈和機(jī)動(dòng)目標(biāo)的攻角變化Fig.5 Variation of angle of attack for missile and maneuvering target
在NODGC制導(dǎo)律的作用下,導(dǎo)彈命中目標(biāo)需要10.28 s,脫靶量為 1.32m,命中時(shí)刻導(dǎo)彈的速度為3425.3m/s,對(duì)于FTCG制導(dǎo)律,命中目標(biāo)的時(shí)間為12.21 s,脫靶量為 4.06m,命中時(shí)刻的速度為 2369.2m/s.
從仿真結(jié)果可以看出,在目標(biāo)做大機(jī)動(dòng)運(yùn)動(dòng)時(shí),制導(dǎo)律NDOGC的脫靶量更小,命中時(shí)間更短,命中速度更高.如圖4可知,相比于制導(dǎo)律FTCG,制導(dǎo)律NDOGC使導(dǎo)彈的運(yùn)動(dòng)軌跡更加平直,命中目標(biāo)耗時(shí)更短.其控制量變化如圖5,由于NDO對(duì)目標(biāo)加速度的實(shí)時(shí)估計(jì),并在控制量中對(duì)目標(biāo)加速度變化帶來(lái)的擾動(dòng)進(jìn)行了有效的補(bǔ)償,降低了導(dǎo)彈需求的法向過(guò)載,故制導(dǎo)律NDOGC的攻角變化范圍更小,更有利于彈體的飛行穩(wěn)定.
考慮NDO對(duì)目標(biāo)加速度的觀測(cè)性能,如圖6所示.觀測(cè)器的估計(jì)值a^t可以穩(wěn)定地跟蹤目標(biāo)加速度的實(shí)際值at,說(shuō)明本文的干擾觀測(cè)器具有良好的性能,估計(jì)誤差較小.
圖6 目標(biāo)加速度的估計(jì)Fig.6 Estimation of target acceleration
如圖7所示,設(shè)計(jì)的狀態(tài)反饋控制律能夠保證滑模面在有限時(shí)間趨近于零,實(shí)現(xiàn)基于碰撞航線的攔截策略.
圖7 滑模面隨時(shí)間變化曲線Fig.7 Curve of sliding mode surface changing with time
4.3 可攔截區(qū)域分析
可攔截區(qū)域是評(píng)判制導(dǎo)律的主要指標(biāo)之一,是在有效攔截目標(biāo)并滿足一定約束條件下的導(dǎo)彈與目標(biāo)初始航跡角的集合.
本文定義當(dāng)脫靶量小于5m即認(rèn)為能夠有效攔截目標(biāo).選取導(dǎo)彈和目標(biāo)的初始航向角集合分別為 γm0∈[90°,160°]和 γt0∈[0°,90°],導(dǎo)彈和目標(biāo)的初始速度分別為Vm0=1 500m/s和Vt0=3000m/s,目標(biāo)的最大過(guò)載為5g.

圖8 FTCG的攔截區(qū)域Fig.8 Capture zone of FTCG
圖9 NDOGC的攔截區(qū)域Fig.9 Capture zone of NDOGC
仿真結(jié)果如圖8、圖9所示.圖中MISS表示導(dǎo)彈脫靶,HIT表示導(dǎo)彈命中目標(biāo).由結(jié)果可以看出,制導(dǎo)律NDOGC的可攔截區(qū)域遠(yuǎn)大于FTCG.NDOGC 僅在 γm0∈[90°,140°],γt0∈[0°,17°]的小部分區(qū)域難以攔截目標(biāo),在余下區(qū)域均可成功攔截.而 FTCG 在 γt0∈[0°,17°]及 γt0∈[34°,90°]的大部分區(qū)域都難以命中目標(biāo).故制導(dǎo)律NDOGC可適用的彈目初始航向角范圍更廣.
4.4 可攔截目標(biāo)速度范圍
對(duì)導(dǎo)彈而言,成功攔截目標(biāo)的速度區(qū)間也反應(yīng)了制導(dǎo)律的適用范圍.由于篇幅所限,本文僅以導(dǎo)彈和目標(biāo)的初始航向角分別為γm0=120°及γt0∈{20°,40°,60°}為例,分析兩種制導(dǎo)律的適用范圍.導(dǎo)彈的初始速度為Vm0=1 500m/s,目標(biāo)以加速度at=5g sin(0.5t)做正弦機(jī)動(dòng).
仿真結(jié)果如表1,在導(dǎo)彈初始航跡角、初始速度及加速度恒定的條件下,制導(dǎo)律NDOGC在目標(biāo)初始航跡角分別為 20°,40°,60°的條件下所攔截目標(biāo)的速度范圍均明顯大于制導(dǎo)律FTCG.仿真結(jié)果表明,對(duì)于高速機(jī)動(dòng)目標(biāo)攔截,NDOGC更加適用.

表1 兩種制導(dǎo)律攔截目標(biāo)的速度范圍Table 1 Velocity range of intercepting target for two guidance law
5 結(jié)論
針對(duì)動(dòng)能攔截器在大氣層外攔截機(jī)動(dòng)目標(biāo)且目標(biāo)加速度不可測(cè)等問(wèn)題,本文提出基于NDO和碰撞航線的新型滑模制導(dǎo)律.并與以零化視線角速率為目標(biāo)設(shè)計(jì)的有限時(shí)間收斂制導(dǎo)律對(duì)比,本文所述制導(dǎo)律能夠保證導(dǎo)彈以更短的時(shí)間、更小的過(guò)載、更大的末端速度實(shí)現(xiàn)對(duì)目標(biāo)的攔截.同時(shí),擴(kuò)展了導(dǎo)彈的可攔截區(qū)域及可攔截目標(biāo)的速度范圍,具有較好的工程應(yīng)用前景.
References)
[1]朱戰(zhàn)霞,韓沛,陳鵬.基于非線性Terminal滑模的動(dòng)能攔截器末制導(dǎo)律設(shè)計(jì)[J].西北工業(yè)大學(xué)學(xué)報(bào),2013,31(2):233-238.Zhu Z X,Han P,Chen P.Design of nonlinear Terminal SMGL(sliding-mode guidance law)for KKV(kinetic kill vehicle)[J].Journal of Northwestern Polytechnical University,2013,31(2):233-238(in Chinese).
[2] Yuan L C.Homing and navigational courses of automatic target seeking devices[J].Journal of Applied Physics,1948,19(12):1122.
[3] Garnell P.Guided weapon control systems[M].Oxford:Pergamon Press,1980:238-240.
[4]谷志軍,陳磊.大氣層外動(dòng)能攔截器順軌攔截技術(shù)研究[J].宇航學(xué)報(bào),2007,28(5):1195-1198.Gu Z J,Chen L.Research on interception along track for exoatmospheric[J].Journal of Astronautics,2007,28(5):1195-1198(in Chinese).
[5]張友安,黃詰,孫陽(yáng)平.帶有落角約束的一般加權(quán)最優(yōu)制導(dǎo)律[J].航空學(xué)報(bào),2014,35(3):848-856.Zhang Y A,Huang J,Sun Y P.Generalized weighted optimal guidance laws with impact angle constraint[J].Acta Aeronautica et Astronautica Sinica,2014,35(3):848-856(in Chinese).
[6]李浩,佘浩平.基于理想視線的彈道成型最優(yōu)導(dǎo)引律[J].兵工學(xué)報(bào),2014,35(8):1200-1204.Li H ,She H P.Trajectory shaping guidance law based on ideal line-of-sight[J].Acta Armamentarii,2014,35(8):1200-1204(in Chinese).
[7] Indig N,Ben-Asher J Z,F(xiàn)arber N.Near-optimal spatial midcourse guidance law with an angular constraint[J].Journal of Guidance,Control,and Dynamics,2014,37(1):214-223.
[8]張運(yùn)喜,孫明瑋,陳增強(qiáng).滑模變結(jié)構(gòu)有限時(shí)間收斂制導(dǎo)律[J].控制理論與應(yīng)用,2012,29(11):1413-1418.Zhang Y X,Sun M W,Chen Z Q.Sliding-mode variable structure finite-time convergence guidance law[J].Control Theory &Applications,2012,29(11):1413-1418(in Chinese).
[9] Zhou D,Sun S,Teo K L.Guidance laws with finite time convergence[J].Journal of Guidance,Control,and Dynamics,2009,32(6):1838-1846.
[10] Rao S,Ghose D.Terminal impact angle constrained guidance laws using variable structure systems theory[J].IEEE Transactions on Control Systems Technology,2013,21(6):2350-2359.
[11] Ran M P,Wang Q,Hou D L,et al.Backstepping design of missile guidance and control based on adaptive fuzzy sliding mode control[J].Chinese Journal of Aeronautics,2014,27(3):634-642.
[12]舒燕軍,唐碩.軌控式復(fù)合控制導(dǎo)彈制導(dǎo)與控制一體化反步設(shè)計(jì)[J].宇航學(xué)報(bào),2013,34(1):79-85.Shu Y Y,Tang S.Integrated guidance and control backstepping design for blended control missile based on NDO[J].Journal of Astronautics,2013,34(1):79-85(in Chinese).
[13]刁兆師,單家元.考慮自動(dòng)駕駛儀動(dòng)態(tài)特性的含攻擊角約束的反演遞推制導(dǎo)律[J].宇航學(xué)報(bào),2014,35(7):818-826.Diao Z S,Shan JY.Back-stepping guidance law with autopilot lag for attack angle constrained trajectories[J].Journal of Astronautics,2014,35(7):818-826(in Chinese).
[14] Qu P P,Zhou D.A dimension reduction observer-based guidance law accounting for dynamics of missile autopilot[J].Proceedings of the Institution of Mechanical Engineers,Part G:Journal of Aerospace Engineering,2013,227(7):1114-1121.
[15] Zhou D,Qu P P,Sun S.A guidance law with terminal impact angle constraint accounting for missile autopilot[J].Journal of Dynamic Systems,Measurement,and Control,2013,135(5):51009.
[16] Zarchan P.Representation of realistic evasive maneuvers by use of shaping filters[J].Journal of Guidance,Control,and Dynamics,1979,10(4):434-439.
[17] Shima T,Oshman Y,Shinar J.Efficient multiple model adaptive estimation in ballistic missile interception scenarios[J].Journal of Guidance,Control,and Dynamics,2002,25(4):667-675.
[18] Zhu Z,Xu D,Liu J,et al.Missile guidance law based on extended state observer[J].IEEE Transactions on Industrial Electronics,2013,60(12):5882-5891.
[19] Zhang Z,Li S,Luo S.Terminal guidance laws of missile based on ISMC and NDOB with impact angle constraint[J].Aerospace Science and Technology,2013,31(1):30-41.
[20] Ratnoo A,Ghose D.Collision-geometry-based pulsed guidance law for exoatmospheric interception[J].Journal of Guidance,Control,and Dynamics,2009,32(2):669-675.
[21] Bhat S P,Bernstein D S.Finite-time stability of continuous autonomous systems[J].SIAM Journal on Control and Optimization,2000,38(3):751-766.
[22] Shtessel Y B,Shkolnikov IA,Levant A.Smooth second-order sliding modes:Missile guidance application[J].Automatica,2007,43(8):1470-1476.
[23] Levant A.Higher-order sliding modes,differentiation and output-feedback control[J].International Journal of Control,2003,76(9-10):924-941.
[24] Hong Y.Finite-time stabilization and stabilizability of a class of controllable systems[J].Systems & Control Letters,2002,46(4):231-236.
猜你喜歡
河北畫(huà)報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04