基于模糊Petri網(wǎng)的門(mén)式起重機(jī)故障診斷專(zhuān)家系統(tǒng)研究
2015-03-19 13:27:38卓宏明
機(jī)械管理開(kāi)發(fā) 2015年3期
卓宏明
(浙江國(guó)際海運(yùn)職業(yè)技術(shù)學(xué)院,浙江 舟山 316021)
引言
隨著現(xiàn)代化生產(chǎn)的進(jìn)行,機(jī)械設(shè)備的故障診斷技術(shù)日益受到重視,而起重機(jī)的功能日益強(qiáng)大、結(jié)構(gòu)也愈加復(fù)雜,并且出現(xiàn)的故障通常是不確定性的,這對(duì)起重機(jī)的故障診斷技術(shù)提出了更高的要求。傳統(tǒng)的故障樹(shù)分析法、故障模式影響和危害度分析法等難以滿(mǎn)足起重機(jī)復(fù)雜系統(tǒng)故障診斷的需求。專(zhuān)家系統(tǒng)是20世紀(jì)60年代初期產(chǎn)生并發(fā)展起來(lái)的一門(mén)應(yīng)用科學(xué),作為人工智能的一個(gè)重要分支,它運(yùn)用知識(shí)和推理步驟來(lái)解決只有專(zhuān)家才能解決的復(fù)雜問(wèn)題,它是以知識(shí)庫(kù)和推理機(jī)為中心而展開(kāi)的。在專(zhuān)家系統(tǒng)中知識(shí)庫(kù)的建立是反映專(zhuān)家系統(tǒng)性能的關(guān)鍵,而以往起重機(jī)專(zhuān)家系統(tǒng)中模糊知識(shí)的表達(dá)形式往往忽略了模糊知識(shí)中所含的模糊變量的問(wèn)題。
Petri網(wǎng)具有很強(qiáng)的抽象能力,可用于專(zhuān)家系統(tǒng)中的知識(shí)表達(dá)和推理的形式化模型的建立。而在Petri網(wǎng)基礎(chǔ)上提出的模糊Petri網(wǎng)(FPN),有較為嚴(yán)密的數(shù)學(xué)理論支持,還可以對(duì)現(xiàn)實(shí)世界中的不確定性和模糊性進(jìn)行合理描述,又可以進(jìn)行不確定性推理。用模糊Petri網(wǎng)的分析方法去處理專(zhuān)家系統(tǒng)中的核心邏輯推理問(wèn)題即推理機(jī)與知識(shí)庫(kù)的建立,可有效地進(jìn)行知識(shí)表達(dá)和推理進(jìn)行不確定性故障的診斷。
1 模糊Petri網(wǎng)推理方法
1.1 模糊Petri網(wǎng)的定義
學(xué)者在一般Petri網(wǎng)理論的基礎(chǔ)上,結(jié)合模糊集理論,提出了模糊Petri網(wǎng)(FPN,F(xiàn)uzzy Petri Net)。
定義1:一個(gè)十元組 FPN(P,T,D,I,O,α,h,W,f,β),被稱(chēng)為模糊 Petri網(wǎng),其中,P = {p1,p2,…,pn}、T = {t1,t2,…,tm}、D = {d1,d2,…,dn}分別表示庫(kù)所結(jié)點(diǎn)、變遷結(jié)點(diǎn)結(jié)點(diǎn)和命題的有限集合,|P|=|D|,P∩T∩D=[1]。
I(O):T→P,是輸入(輸出)函數(shù),反映變遷到庫(kù)所得映射。
α:α→ [0,1],是一個(gè)映射,每一個(gè)庫(kù)所結(jié)點(diǎn)pi∈P有一個(gè)標(biāo)記值M(pi),反映庫(kù)所結(jié)點(diǎn)表示的命題的真實(shí)程度,即命題的置信度。
h:h→ [0,1],也是一個(gè)映射,對(duì)變遷結(jié)點(diǎn)t(t∈T)定義的一個(gè)閾值h(t),h(t)=λ。
W = {ω1,ω2,…,ωr},是規(guī)則的權(quán)值集合,反映規(guī)則中前提條件對(duì)結(jié)論的支持程度。
f:f→ [0,1],是一個(gè)映射,給變遷賦予規(guī)則的確信度f(wàn)(t),f(t)=μ。
β:P→D,是一個(gè)映射,反映庫(kù)所結(jié)點(diǎn)與命題之間的一一對(duì)應(yīng)關(guān)系。
定義2:所謂1個(gè)變遷可引發(fā),是說(shuō)對(duì)于給定的閾值λ,若變遷的輸入庫(kù)所的托肯值(相應(yīng)于命題的置信度)大于閾值λ,則變遷可引發(fā),否則不能引發(fā)[2]。
即if M(pi)≥λthen變遷t可引發(fā);
else變遷t不可引發(fā),即M(pi)≤λ。
1.2 模糊產(chǎn)生式規(guī)則的故障表達(dá)
模糊產(chǎn)生式規(guī)則的基本形式是:if d1then d2,μ,λ,式中d1和d2是一些包含模糊變量的命題它們的隸屬度定義在0到1之間;μ是規(guī)則的置信度,其取值的大小反映規(guī)則成立的可信程度;λ是規(guī)則成立的閾值,只有d1成立的置信度大于閾值時(shí),規(guī)則才被激活。在基本變量基礎(chǔ)上有三種模糊產(chǎn)生式規(guī)則推廣形式[3]:
1)if d1then d2,μ,λ;
2)if d1and d2and…and dnthen dm,μ,λ;
3)if dior d2or…or dnthen dm,μ,λ。
其中d1,dn,dm是包含一些模糊變量的命題,d1和dn表示一組前提或狀態(tài);dm表示結(jié)論;μ∈[0,1]是規(guī)則的置信度;λ是規(guī)則成立的閾值。
1.3 FPN與產(chǎn)生式規(guī)則的轉(zhuǎn)化方法
利用Petri網(wǎng)表示模糊產(chǎn)生式規(guī)則時(shí),它把規(guī)則的前提和結(jié)論都看作是庫(kù)所,而把前提和結(jié)論之間的因果關(guān)系視為變遷[4,5],所以上述規(guī)則可由圖1到圖3所示的FPN表示,圖1中p1和p2分別為規(guī)則的前提和結(jié)論庫(kù)所;圖2中p1到pn為規(guī)則的前提庫(kù)所,pm為結(jié)論庫(kù)所;圖3中p1到pn為規(guī)則的前提庫(kù)所,pm為結(jié)論庫(kù)所。
2 門(mén)式起重機(jī)故障診斷實(shí)例

圖1 簡(jiǎn)單規(guī)則的FPN模型
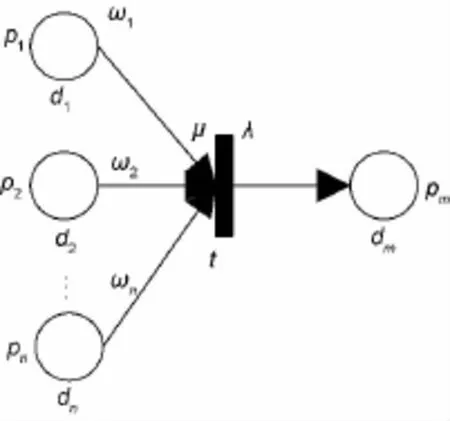
圖2 與規(guī)則的FPN模型

圖3 或規(guī)則的FPN模型
故障診斷專(zhuān)家系統(tǒng)是將專(zhuān)家系統(tǒng)應(yīng)用到了故障診斷之中。基于模糊Petri網(wǎng)門(mén)式起重機(jī)故障診斷專(zhuān)家系統(tǒng),首先是起重機(jī)故障診斷知識(shí)庫(kù)的建立,它是起重機(jī)故障診斷系統(tǒng)中的核心組成部分。然后根據(jù)建立的知識(shí)庫(kù)繪制模糊Petri網(wǎng)表示這些規(guī)則。故障診斷的任務(wù)就是根據(jù)所出現(xiàn)的征兆庫(kù)所尋找能導(dǎo)致征兆庫(kù)所的故障庫(kù)所的過(guò)程。最后采用反向推理方法找出目標(biāo)故障。系統(tǒng)以起重機(jī)各零部件的平均無(wú)故障時(shí)間MTBF的倒數(shù)作為該零部件故障的故障率即模糊Petri網(wǎng)的置信度。具體過(guò)程為先從故障的一個(gè)征兆根據(jù)置信度的大小依次反向推理得到產(chǎn)生這個(gè)征兆的幾種可能故障,根據(jù)故障對(duì)應(yīng)的命題通過(guò)人機(jī)交互系統(tǒng)選擇故障嚴(yán)重程度,根據(jù)系統(tǒng)預(yù)先設(shè)定的模糊程度量化表算出可信度,再對(duì)這些可能的故障進(jìn)行正向置信度計(jì)算,每次搜索后都標(biāo)記防止重復(fù)搜索。如果在推理過(guò)程中其置信度小于設(shè)定的閾值,則對(duì)應(yīng)的故障可被排除;若大于閾值,就繼續(xù)向下計(jì)算,直至找出目標(biāo)故障并得到其置信度及維修建議,并對(duì)該故障路徑上的所有故障率即置信度進(jìn)行滾動(dòng)更新。
經(jīng)過(guò)與專(zhuān)家的交流及查閱相關(guān)維修記錄及相關(guān)資料,對(duì)門(mén)式起重機(jī)的常見(jiàn)故障進(jìn)行FPN模糊推理。
當(dāng)前知識(shí)庫(kù)中有如下規(guī)則:
規(guī)則1:if軌道變形then軌道故障μ=0.94;
規(guī)則2:if軌面磨損then軌道故障μ=0.95;
規(guī)則3:if軌距超差then軌道故障μ=0.93;
規(guī)則4:if主梁下沉then主梁故障μ=0.97;
規(guī)則5:if主梁彎曲then主梁故障μ=0.94;
規(guī)則6:if滑輪繩槽磨損then軌道及主梁部分故障μ=0.95;
規(guī)則7:if制動(dòng)器打滑then制動(dòng)器故障μ=0.98;
規(guī)則8:if制動(dòng)器不松閘then制動(dòng)器故障μ=0.94;
規(guī)則9:if齒輪震顫then減速器故障μ=0.93;
規(guī)則10:if箱體發(fā)熱t(yī)hen減速器故障μ=0.94;
規(guī)則11:if箱體漏油then減速器故障μ=0.96;
規(guī)則12:if卷筒損壞破裂then減速器及卷筒故障μ=0.95;
規(guī)則13:if軌道故障then軌道及主梁部分故障μ=0.98;
規(guī)則14:if主梁故障then軌道及主梁部分故障μ=0.96;
規(guī)則15:if減速器故障then減速器及卷筒故障μ=0.98;
規(guī)則16:if軌道及主梁部分故障then門(mén)式起重機(jī)故障μ=0.98;
規(guī)則17:if制動(dòng)器故障then門(mén)式起重機(jī)故障μ=0.95;
規(guī)則18:if減速器及卷筒故障then門(mén)式起重機(jī)故障μ=0.97;
這些規(guī)則用模糊Petri網(wǎng)表示,如圖4所示。
表1為各個(gè)庫(kù)所的含義。
由圖4門(mén)式起重機(jī)常見(jiàn)故障模糊Petri網(wǎng)模型可見(jiàn),當(dāng)門(mén)式起重機(jī)發(fā)生常見(jiàn)故障即庫(kù)所p19。
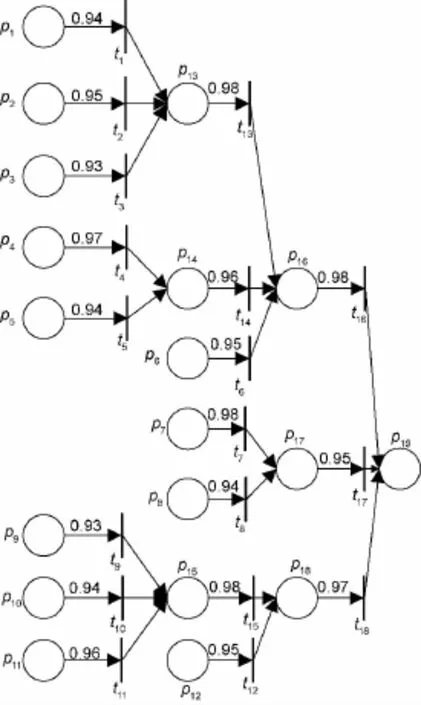
圖4 門(mén)式起重機(jī)常見(jiàn)故障模糊Petri網(wǎng)模型

表1 各個(gè)庫(kù)所的含義
按照以下步驟反向推理尋求產(chǎn)生這個(gè)征兆的故障:
1)采用反向推理可知,這個(gè)征兆可能由變遷t16、t17、t18觸發(fā)而來(lái),比較三者的置信度發(fā)現(xiàn)t16的置信度最大,只要軌道及主梁部分故障,門(mén)式起重機(jī)肯定發(fā)生了故障。則首先選擇該條路徑即p16→p19,并將p16賦予搜索標(biāo)記,避免重復(fù)搜索。其次,比較能引發(fā)p16的變遷t13、t14、t6的置信度,采用置信度最大選擇原則,首先系統(tǒng)會(huì)選擇置信度最大的變遷t13,并同時(shí)找到t13的輸入庫(kù)所p13,再賦予搜索標(biāo)記。接著繼續(xù)對(duì)比變遷t1、t2、t3的置信度,選擇置信度大的變遷t2,找到對(duì)應(yīng)庫(kù)所p2,該庫(kù)所為故障庫(kù)所,因此需要確定其置信度。這時(shí)系統(tǒng)通過(guò)人機(jī)對(duì)話(huà)系統(tǒng)詢(xún)問(wèn)用戶(hù):“軌面是否磨損?”若用戶(hù)選擇“軌面有磨損且很?chē)?yán)重”,則由模糊程度量化表自動(dòng)算出該命題的置信度為α(p2)=0.95,而所有變遷觸發(fā)閾值假定都為λ=0.7,則認(rèn)為p2對(duì)應(yīng)的命題為一被激活的事件,計(jì)算p13的置信度α(p13)=α(p2)×0.95=0.90>0.7,p13對(duì)應(yīng)的命題也是一被激活的事件,得到α(p16)=α(p13)×0.98=0.88>0.7,p16對(duì)應(yīng)的命題被激活,最后得到α(p19)=α(p16)×0.98=0.86>0.7此時(shí)故障根源已找到,即為庫(kù)所p2對(duì)應(yīng)的命題軌面磨損,由它產(chǎn)生的門(mén)式起重機(jī)常見(jiàn)故障的置信度為α(p19)=0.86。
2)用戶(hù)在回答:“軌面是否磨損?”時(shí),若選擇“基本沒(méi)有”,由模糊程度量化表計(jì)算出該命題的置信度α(p2)=0.1小于設(shè)定的閾值0.7,變遷t2不會(huì)被觸發(fā)則p2對(duì)應(yīng)的命題沒(méi)有被激活,所以p13不會(huì)由p2產(chǎn)生即α(p13)=0,但p13被激活的路徑還有p1→p13、p3→p13,系統(tǒng)按照變遷可信度大小,繼續(xù)執(zhí)行上述的推理過(guò)程。只要詢(xún)問(wèn)的事件被認(rèn)可,即命題的置信度大于設(shè)定的閾值0.7,則可得到p13的置信度α(p13)。
3)如果p1→p13、p3→p13都沒(méi)有被激活,則系統(tǒng)按置信度最大選擇原則依次搜索其它可能的路徑,重復(fù)上述的過(guò)程,直至找出真正的故障,并最后計(jì)算出此結(jié)論的置信度并給出維修建議。
3 結(jié)語(yǔ)
專(zhuān)家系統(tǒng)設(shè)計(jì)的關(guān)鍵是專(zhuān)家系統(tǒng)的知識(shí)庫(kù)模型及其知識(shí)表達(dá)方式。模糊Petri網(wǎng)能實(shí)現(xiàn)知識(shí)表示和推理模型的集成和統(tǒng)一,有效解決了專(zhuān)家系統(tǒng)中的知識(shí)表達(dá)和推理的形式化模型的建立診斷推理過(guò)程中知識(shí)表示與推理等關(guān)鍵問(wèn)題。用模糊Petri網(wǎng)進(jìn)行系統(tǒng)故障建模,通過(guò)圖形直觀清晰地描述故障的產(chǎn)生和傳播便于在計(jì)算機(jī)上實(shí)現(xiàn),并能處理不確定性及模糊性,還具有并行推理機(jī)制。本文通過(guò)門(mén)式起重機(jī)常見(jiàn)故障診斷的實(shí)例,說(shuō)明了采用模糊Petri網(wǎng)構(gòu)建的門(mén)式起重機(jī)故障診斷專(zhuān)家系統(tǒng)可以較有效快速地對(duì)門(mén)式起重機(jī)常見(jiàn)故障進(jìn)行診斷,具有一定的可行性與實(shí)用性。
[1] 宗群,王波,牙淑紅.模糊Petri網(wǎng)在電梯故障診斷中的應(yīng)用[J].起重運(yùn)輸機(jī)械,2004(4):44-48.
[2] 廖志遠(yuǎn),郭杰.基于Petri網(wǎng)的起重運(yùn)輸機(jī)械故障診斷的研究[J].起重運(yùn)輸機(jī)械,2007(6):22-24.
[3] 李霽紅,康銳,賈穎.復(fù)雜系統(tǒng)的模糊故障診斷方法研究[J].系統(tǒng)工程與電子技術(shù),2005,27(7):1 322-1 324.
[4] 慶勝,鄔學(xué)禮.FMS故障診斷的模糊行為Petri網(wǎng)研究[J].電子技術(shù)應(yīng)用,1997(4):14-16.
[5] 郎文輝,黃勝,駱德漢.卷接機(jī)組故障診斷的模糊行為Petri網(wǎng)研究[J].振動(dòng)、測(cè)試與診斷,1999,19(4):368-372.
猜你喜歡
小獼猴智力畫(huà)刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(bào)(哲學(xué)社會(huì)科學(xué)版)(2016年9期)2017-01-15 13:52:02
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
