具備升沉補償功能的海洋起重機吊重位移量測量方法
2015-03-25 03:23:56卓寧寧
廣東造船 2015年3期
卓寧寧
(中船黃埔文沖船舶有限公司,廣州 510715)
1 前言
隨著國家深海戰(zhàn)略的實施推進,水下作業(yè)海洋工程船舶的建造取得了快速的發(fā)展。水下作業(yè)海洋工程船舶一般需具備DP3能力,能在復(fù)雜海況環(huán)境條件進行多種深水水下施工作業(yè),如:采油樹、PLEM、PLET、跨接管、CDU等。船舶起重機在進行以上施工作業(yè)時,吊重會因船舶受到波浪的作用而產(chǎn)生升沉及縱橫搖等復(fù)雜的相對運動,從而無法保持位置固定,這對于水下作業(yè)會帶來較大的安全風(fēng)險,增加施工難度,因此具備波浪補償功能的重型船舶起重機越來越多地在海洋工程船舶上得到實際應(yīng)用。吊重位移偏移量作為具備波浪補償海洋起重機的重要指標,必須得到實際的檢測及測量。
2 波浪補償功能簡介
波浪補償功能主要由執(zhí)行機構(gòu)、相對運動檢測模塊和控制系統(tǒng)組成。控制系統(tǒng)根據(jù)相對運動參數(shù)檢測信號,包括船舶搖擺周期、振幅等信息,通過控制系統(tǒng)進行計算,根據(jù)計算出的結(jié)果給出控制信號,驅(qū)動執(zhí)行機構(gòu)進而實現(xiàn)波浪補償。
波浪補償原理及受力載荷平衡圖,如圖1、圖2所示。
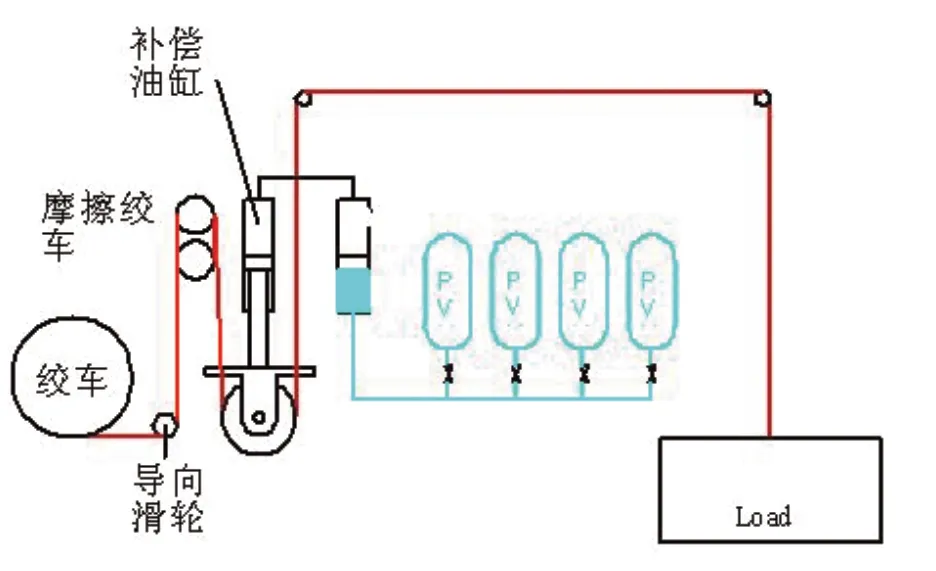
圖1 波浪補償原理圖
船舶在海洋中會隨著波浪產(chǎn)生相應(yīng)的振幅及加速度,吊重上下浮動,補償油缸的受力隨之減少或者增大,根據(jù)起重機MRU的檢測數(shù)據(jù),自動調(diào)整氮氣及液壓油注入補償油缸的容量,增大或者減少補償油缸的伸縮行程,以達到減少吊重位移的目的。

圖2 受力載荷平衡圖
3 吊重位移量的測量方法
3.1 補償系統(tǒng)試驗
3.1.1 試驗準備工作
進行此項試驗前需具備以下條件:
(1)波浪補償試驗時,船舶無其他能引起船舶搖擺的工作;
(2)選取試驗吊重;
(3)ROV的支持;
(4)單獨的水深測量設(shè)備,如HIPAP等;
(5)海況檢測裝置;
(6)適當?shù)乃睿?/p>
(7)船舶相關(guān)的抗橫傾系統(tǒng)試驗完畢。
補償系統(tǒng)試驗的目的是檢測起重機吊重的實際位移量,此數(shù)值理論上越小越好。“海洋石油286”船配置HUISMAN產(chǎn)品OMC9000-400桅桿式起重機,技術(shù)指標中吊重位移量不大于15 cm。
為了保證吊重放入水中不會產(chǎn)生傾倒現(xiàn)象,吊重的設(shè)計及制作應(yīng)盡量設(shè)置成一個整體的構(gòu)件,同時整體的結(jié)構(gòu)形式也利于吊重沉入海底時克服淤泥的吸附力,如圖3所示。
測量繩在水中會因波浪及洋流處于浮動狀態(tài),測量繩的浮動會造成偏移量測量的誤差較大。為此設(shè)計了以下的測試方案(見圖4):圖中帶有刻度的測量繩長度一般長約15~20 m(采用紅、白油漆以5 cm為間距進行涂色,方便ROV水下攝像頭的觀察),一端連接浮球(浮球完全浸沒水中),另一端連接10~15 kg重物(此端落入海床底部),測量繩穿過眼環(huán)(眼環(huán)固定在吊重上)隨吊重一起放入海底。此方案可以保證吊重在上下位移的過程中始終保證眼環(huán)處測量點與海床之間的尼龍繩為直段,提高數(shù)據(jù)測量的準確性。

圖3 吊重工裝
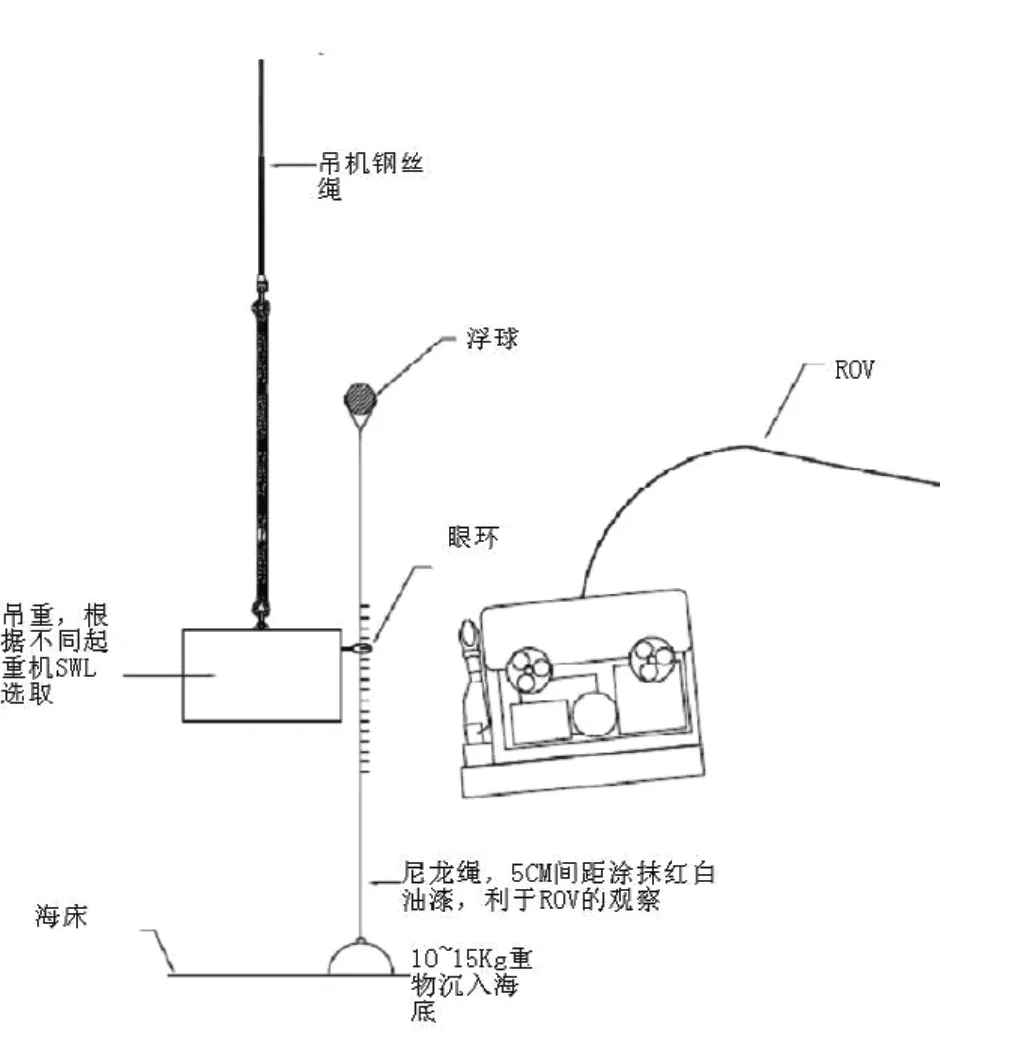
圖4 吊重位移測量方案布置圖
3.1.2 試驗步驟
下面以海洋石油286船為例,介紹試驗的詳細步驟:
(1)首先根據(jù)起重機廠家提供的負重曲線,選取適當?shù)踔亍?/p>
(2)參照起重機的設(shè)計參數(shù)、工作環(huán)境,選取適當?shù)暮r,如表1所列。
(3)確定以上參數(shù)之后,將船舶航行至相應(yīng)海域,測量實際海況、風(fēng)速等信息,同時按照方案布置,圖4準備好所有的試驗工具,符合要求后,先進行波浪補償?shù)墓δ苄栽囼灒蛰d),步驟如下:
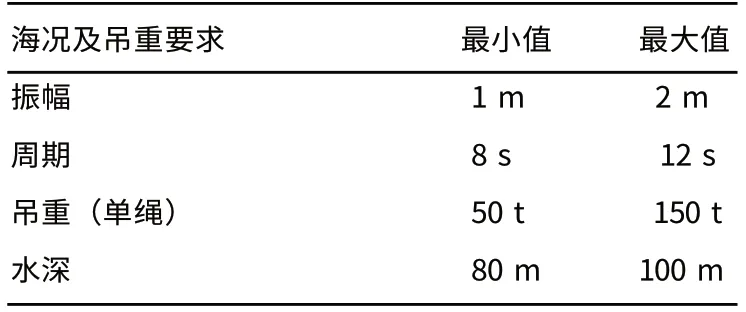
表1 起重機補償功能海試選取參數(shù)
①根據(jù)起重機自身的MRU單元,記錄實際的海況信息,包括波高、波浪周期;
②檢查起重機各設(shè)備的運轉(zhuǎn)狀況是否正常;
③將鉤頭落入水中約50 m處,記錄起重機駕駛室屏幕顯示的鉤頭位置;
④開啟波浪補償模式,起重機進入波浪補償工作狀態(tài);保持此狀態(tài)運行20分鐘,檢查系統(tǒng)的溫度、壓力、液位等;
⑤利用ROV監(jiān)測鉤頭的位置偏移量是否正常;
⑥提升鉤頭至主甲板,關(guān)閉AHC模式。
(4)功能試驗合格之后,進行負載試驗,步驟如下:
①將固定在主甲板的重物掛至鉤頭上,注意各索具卸扣的連接要符合吊裝工藝;
②提升重物,記錄空氣中吊重的數(shù)值;
③回轉(zhuǎn)吊臂,下放吊重至剛接觸水面的位置,重新設(shè)置起重機鋼絲繩里程表;
④下放鉤頭至水下約5 m處,記錄重物在水中的重量;
⑤繼續(xù)下放鉤頭,直至吊重距海床表面約10 m處;
⑥根據(jù)駕駛室顯示屏上讀數(shù)記錄水深、吊重數(shù)值;
⑦開啟起重機波浪補償模式,保持15分鐘;
⑧根據(jù)駕駛室顯示屏上的讀數(shù),記錄下吊重的位置偏移量,同時ROV一直配合此項工作,在ROV控制室直觀監(jiān)測到吊重的位置偏移量,與起重機駕駛室讀數(shù)形成比較;
⑨繼續(xù)下放鉤頭,直至吊重落至海床上;保持運行5分鐘,重復(fù)步驟⑧,記錄數(shù)據(jù);
⑩提升鉤頭至海床上約10 m處,保持運行5分鐘,重復(fù)步驟(⑧,記錄數(shù)據(jù);
⑾關(guān)閉波浪補償模式,提升吊重,放至主甲板;
⑿吊重與鉤頭之間脫離,起重機吊臂放至吊臂托架上,試驗結(jié)束。
本船的試驗水深80 m,吊重選取100 t,波高約1.8m。在此環(huán)境下進行了補償功能的測試。經(jīng)過實測,吊重的實際位置偏移量不大于15 cm,達到設(shè)計指標要求,相關(guān)海試圖片見圖5。
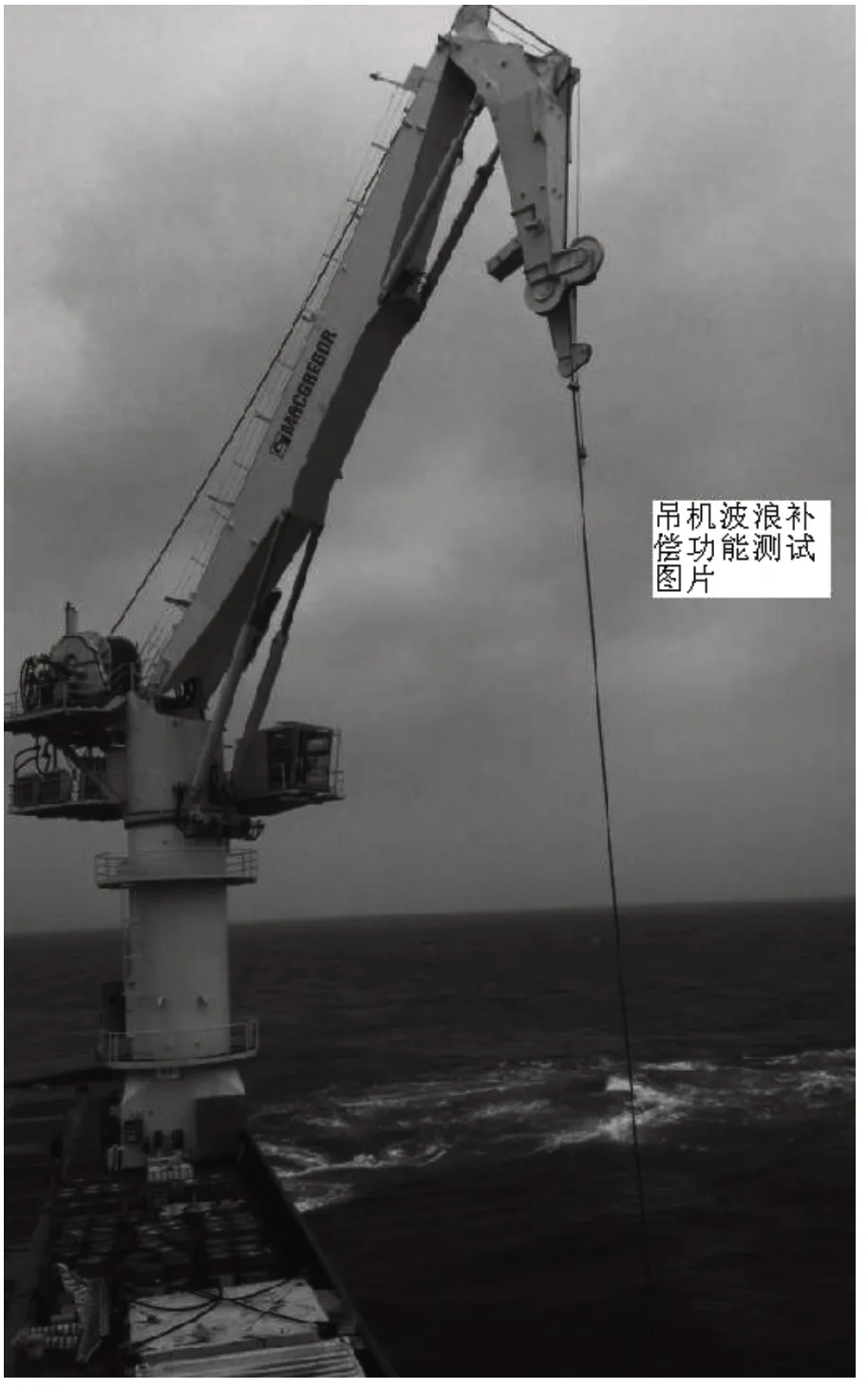
圖5 起重機波浪補償測試圖片
4 結(jié)束語
本文對吊重位移量試驗的前期準備、吊重工裝形式的設(shè)計、位移量的測量方案、測量步驟等進行了闡述,文中圖4的測量方案具有通用性,具備補償功能的起重機測試都可按照此方案進行補償功能試驗,但需特別注意,不同的起重機、吊重及海況的選取需嚴格按照各起重機的技術(shù)指標選取,否則將影響吊重位移量的測量精度。
[1]中國船級社.船舶與海上設(shè)施起重規(guī)范[M].北京:人民交通出版社,2007.
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國船檢(2017年3期)2017-05-18 11:33:09
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
