籠型感應(yīng)電動(dòng)機(jī)斷條故障前后轉(zhuǎn)子電磁力計(jì)算及結(jié)構(gòu)靜力學(xué)分析
2015-04-06 02:10:00馮春爽楊忠學(xué)劉海松
電工技術(shù)學(xué)報(bào) 2015年15期
關(guān)鍵詞:故障
謝 穎 馮春爽 楊忠學(xué) 劉海松 王 澤
(1.哈爾濱理工大學(xué)電氣與電子工程學(xué)院 哈爾濱 1500802.東北石油大學(xué)電氣信息工程學(xué)院 大慶 163318)
?
籠型感應(yīng)電動(dòng)機(jī)斷條故障前后轉(zhuǎn)子電磁力計(jì)算及結(jié)構(gòu)靜力學(xué)分析
謝 穎1馮春爽1楊忠學(xué)2劉海松1王 澤1
(1.哈爾濱理工大學(xué)電氣與電子工程學(xué)院 哈爾濱 1500802.東北石油大學(xué)電氣信息工程學(xué)院 大慶 163318)
以Y802-2型籠型感應(yīng)電動(dòng)機(jī)為例,對(duì)轉(zhuǎn)子斷條故障時(shí)的轉(zhuǎn)子電磁應(yīng)力及結(jié)構(gòu)靜力學(xué)進(jìn)行研究。以二維瞬態(tài)磁場(chǎng)結(jié)果為基礎(chǔ),結(jié)合麥克斯韋張量法及洛倫茲力原理,計(jì)算得到轉(zhuǎn)子所受磁應(yīng)力,并給出故障前后轉(zhuǎn)子磁應(yīng)力隨時(shí)間的變化規(guī)律,此外通過(guò)將計(jì)算所得轉(zhuǎn)矩均值與實(shí)驗(yàn)均值相比較,驗(yàn)證了該電磁力計(jì)算結(jié)果的準(zhǔn)確性。以所得電磁力為載荷,進(jìn)行電動(dòng)機(jī)穩(wěn)態(tài)情況時(shí)轉(zhuǎn)子結(jié)構(gòu)靜力學(xué)的研究,得到轉(zhuǎn)子故障形變分布。根據(jù)故障前后轉(zhuǎn)子電磁力及形變位移的變化可推測(cè)出斷條故障的進(jìn)一步演化趨勢(shì)。
感應(yīng)電動(dòng)機(jī) 斷條故障 有限元法 電磁力 結(jié)構(gòu)靜力學(xué) 故障形變
0 引言
籠型感應(yīng)電動(dòng)機(jī)轉(zhuǎn)子導(dǎo)條故障包括導(dǎo)條的斷裂和開(kāi)焊,導(dǎo)致故障的主要原因之一是電動(dòng)機(jī)長(zhǎng)期運(yùn)行中受到的各種力的作用,包括熱應(yīng)力、電磁應(yīng)力、殘余應(yīng)力和動(dòng)態(tài)應(yīng)力等,這些力共同作用可導(dǎo)致斷條故障的發(fā)生。電動(dòng)機(jī)正常運(yùn)行時(shí),在各種力的作用下,轉(zhuǎn)子導(dǎo)條會(huì)出現(xiàn)一定的結(jié)構(gòu)損傷,而斷條故障的發(fā)生將導(dǎo)致電動(dòng)機(jī)磁場(chǎng)畸變及轉(zhuǎn)子電磁力的分布改變,從而使轉(zhuǎn)子結(jié)構(gòu)形變發(fā)生變化,長(zhǎng)期如此會(huì)使電動(dòng)機(jī)出現(xiàn)疲勞斷裂現(xiàn)象,導(dǎo)致多根導(dǎo)條斷裂。因此對(duì)故障前后轉(zhuǎn)子局部電磁力以及該應(yīng)力引起的結(jié)構(gòu)形變的研究非常有必要。
目前為止,在電磁力的計(jì)算及結(jié)構(gòu)靜力學(xué)分析方面,國(guó)內(nèi)外學(xué)者已做了大量研究工作。文獻(xiàn)[1,2]以磁場(chǎng)結(jié)果為基礎(chǔ),通過(guò)多種算法(包括麥克斯韋張量法、虛位移法及磁化電流法等)求解模型電磁力,分析對(duì)比了各種算法的優(yōu)缺點(diǎn),并得出磁場(chǎng)計(jì)算結(jié)果是影響電磁力計(jì)算結(jié)果準(zhǔn)確性的重要因素的結(jié)論。文獻(xiàn)[3]分析了極化模型電磁力算法的理論推導(dǎo)及物理意義,并以繼電器為例進(jìn)行了研究。文獻(xiàn)[4,5]以不同算法計(jì)算得到的電磁力為載荷進(jìn)行了結(jié)構(gòu)形變計(jì)算,并比較了得到的結(jié)果。文獻(xiàn)[6,7]基于虛位移原理對(duì)汽輪發(fā)電機(jī)的局部電磁力進(jìn)行了計(jì)算,并提出了一種新算法。文獻(xiàn)[8]通過(guò)麥克斯韋張量法建立了無(wú)軸承開(kāi)關(guān)磁阻電動(dòng)機(jī)的電磁力數(shù)學(xué)模型。文獻(xiàn)[9]運(yùn)用麥克斯韋張量法計(jì)算了永磁及鐵磁材料電磁力,論述了電磁力密度與單元空間電磁力的意義。文獻(xiàn)[10]計(jì)算了汽輪發(fā)電機(jī)端部的電磁場(chǎng)分布,采用三維有限元法對(duì)端部力密度進(jìn)行了計(jì)算,得到了端部電磁力的精確分布,為后續(xù)優(yōu)化工作奠定了基礎(chǔ)。文獻(xiàn)[11,12]計(jì)算了大型感應(yīng)電動(dòng)機(jī)單相短路故障時(shí)的動(dòng)態(tài)電磁力以及某籠型感應(yīng)電動(dòng)機(jī)徑向電磁力。文獻(xiàn)[13]利用有限元法對(duì)電動(dòng)機(jī)進(jìn)行了動(dòng)力學(xué)及應(yīng)力位移仿真,根據(jù)所得數(shù)據(jù)進(jìn)行了轉(zhuǎn)子的強(qiáng)度和剛度校核,并分析了轉(zhuǎn)子的主要破壞形式和危險(xiǎn)位置;此外結(jié)構(gòu)靜力學(xué)分析可進(jìn)一步深入到強(qiáng)度分析及結(jié)構(gòu)優(yōu)化設(shè)計(jì)中[14,15]。
本文以籠型感應(yīng)電動(dòng)機(jī)磁場(chǎng)計(jì)算結(jié)果為基礎(chǔ),利用麥克斯韋張量法和洛倫茲力原理對(duì)電動(dòng)機(jī)斷條前后的轉(zhuǎn)子局部電磁力進(jìn)行求解,并分析了故障前后電磁力隨時(shí)間的變化規(guī)律。基于轉(zhuǎn)子局部電磁力計(jì)算結(jié)果,利用有限元法對(duì)轉(zhuǎn)子結(jié)構(gòu)靜力學(xué)進(jìn)行研究,得到了健康及故障轉(zhuǎn)子的形變圖及形變曲線,進(jìn)而預(yù)測(cè)出轉(zhuǎn)子導(dǎo)條進(jìn)一步的斷裂位置。
1 轉(zhuǎn)子電磁力計(jì)算與分析
1.1 樣機(jī)測(cè)試平臺(tái)
本文以一臺(tái)Y802-2型籠型感應(yīng)電動(dòng)機(jī)為例進(jìn)行研究,對(duì)樣機(jī)進(jìn)行了轉(zhuǎn)矩測(cè)量實(shí)驗(yàn),分別測(cè)量轉(zhuǎn)子健康和兩根斷條時(shí)的轉(zhuǎn)矩均值,圖1a、圖1b給出了健康轉(zhuǎn)子及斷條轉(zhuǎn)子,實(shí)驗(yàn)平臺(tái)如圖1c所示,實(shí)驗(yàn)使用轉(zhuǎn)矩轉(zhuǎn)速測(cè)試儀測(cè)量樣機(jī)輸出轉(zhuǎn)矩,測(cè)試過(guò)程中保證正常及故障電動(dòng)機(jī)輸出功率均為額定功率。
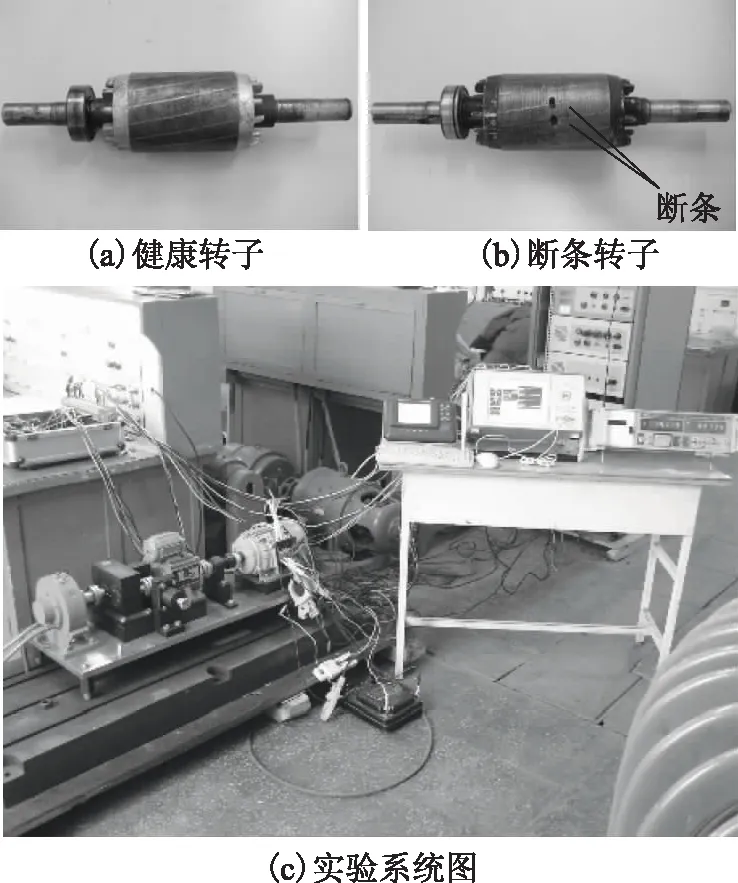
圖1 測(cè)試平臺(tái)Fig.1 Test table
1.2 樣機(jī)參數(shù)及電磁場(chǎng)計(jì)算方程
樣機(jī)主要參數(shù)如表1所示。計(jì)算中忽略磁場(chǎng)在軸向方向的變化,將三維空間磁場(chǎng)簡(jiǎn)化為二維問(wèn)題,磁矢量方程如式(1)所示[16],該模型不計(jì)定、轉(zhuǎn)子鐵心產(chǎn)生的渦流,且認(rèn)為轉(zhuǎn)子硅鋼片和導(dǎo)條之間沒(méi)有電流通過(guò)。
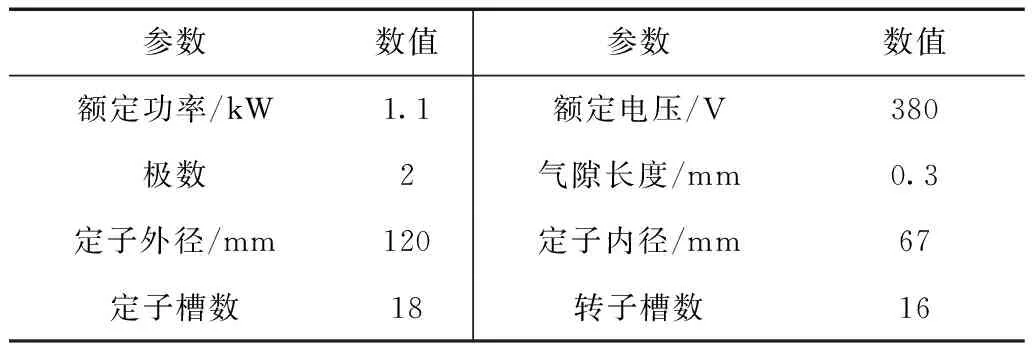
表1 樣機(jī)參數(shù)Tab.1 Parameters of the prototype motor
(1)
根據(jù)文獻(xiàn)[16],通過(guò)修正模型中導(dǎo)條的磁導(dǎo)率和電導(dǎo)率計(jì)及轉(zhuǎn)子斜槽和端環(huán)對(duì)二維磁場(chǎng)的影響,公式為
(2)
(3)
式中:σ′為修正后的轉(zhuǎn)子導(dǎo)條電導(dǎo)率;σ為實(shí)際鑄鋁電導(dǎo)率;R′2b為導(dǎo)條電阻值;R′2r為端環(huán)電阻值;μ′2為修正后的轉(zhuǎn)子導(dǎo)條磁導(dǎo)率;μ0為空氣磁導(dǎo)率;x′2b為轉(zhuǎn)子槽漏抗;x′2r為轉(zhuǎn)子端部漏抗;x′2k為斜槽漏抗。
1.3 磁場(chǎng)計(jì)算結(jié)果及分析
圖2為樣機(jī)額定負(fù)載運(yùn)行時(shí)故障前后的磁通密度分布,圖中已標(biāo)出斷條位置。健康電動(dòng)機(jī)磁場(chǎng)呈對(duì)稱(chēng)分布,故障發(fā)生后磁場(chǎng)的對(duì)稱(chēng)性被破壞,且斷條位置附近出現(xiàn)了較高的磁飽和現(xiàn)象。

圖2 樣機(jī)額定負(fù)載運(yùn)行時(shí)斷條前后磁通密度分布Fig.2 Distribution of magnetic flux density of the motor operating under rated load before and after broken bars
1.4 感應(yīng)電動(dòng)機(jī)轉(zhuǎn)子電磁力計(jì)算
1.4.1 電磁力計(jì)算分類(lèi)
根據(jù)轉(zhuǎn)子受力部位和受力處交界面不同,本文將轉(zhuǎn)子所受電磁力分為3類(lèi):第1類(lèi)為轉(zhuǎn)子硅鋼片與導(dǎo)條交界處產(chǎn)生的電磁力,稱(chēng)之為槽一周法向力,如圖3a、圖3b所示fn1、fn2;第2類(lèi)為轉(zhuǎn)子硅鋼片與空氣交界處產(chǎn)生的電磁力,稱(chēng)之為轉(zhuǎn)子徑向力,即圖6中的fr1和fr2;第3類(lèi)為轉(zhuǎn)子導(dǎo)條受到的洛倫茲力,如圖8中的fbr和fbt。規(guī)定樣機(jī)運(yùn)行方向?yàn)轫槙r(shí)針?lè)较颉?/p>
1.4.2 電磁力計(jì)算方法
麥克斯韋張量法是用等效的面積力代替體積力來(lái)計(jì)算交界面上的電磁應(yīng)力,本文利用該方法計(jì)算鐵磁媒質(zhì)受到的電磁力,如式(4)所示[16];利用式(5)計(jì)算轉(zhuǎn)子導(dǎo)條所受洛倫茲力[16]。
(4)
式中:B1n、B2n為不同媒質(zhì)交界面處的法向磁通密度值;B1t、B2t為切向磁通密度值;μ1、μ2為兩種媒質(zhì)的磁導(dǎo)率;s代表物體的外表面。
Fe=lSeJe×Be
(5)
式中:Fe為單元所受洛侖茲力矢量;l為導(dǎo)條軸向長(zhǎng)度;Se為單元面積;Je為單元電流密度矢量;Be為單元磁通密度矢量。
1.5 轉(zhuǎn)子電磁力計(jì)算結(jié)果及分析
1.5.1 實(shí)驗(yàn)值與仿真值對(duì)比
由轉(zhuǎn)子電磁力的計(jì)算結(jié)果,可得到作用在電動(dòng)機(jī)轉(zhuǎn)子上的整體轉(zhuǎn)矩值。為了驗(yàn)證仿真的準(zhǔn)確性,將電動(dòng)機(jī)在健康及斷條情況運(yùn)行時(shí)的轉(zhuǎn)速及轉(zhuǎn)矩的計(jì)算均值與實(shí)驗(yàn)均值進(jìn)行對(duì)比,如表2所示,為了便于比較,實(shí)驗(yàn)測(cè)試過(guò)程中保證樣機(jī)在各種情況下輸出功率均為1.1 kW,此條件下故障情況時(shí)的轉(zhuǎn)速有所降低,且電磁轉(zhuǎn)矩增加,表中計(jì)算及實(shí)驗(yàn)得到的結(jié)果符合這一情況。

表2 電磁轉(zhuǎn)矩及轉(zhuǎn)速值對(duì)比Tab.2 Comparison of electromagnetic torque and speed value
1.5.2 轉(zhuǎn)子槽一周法向力分布
圖3為轉(zhuǎn)子槽一周法向力的分布示意圖。圖3a中,將ab、bc、cd及do區(qū)分別定義為槽口、靠近槽口、靠近槽底及槽底,圖3b中,ef、fg、gh及ho區(qū)定義同圖3a。圖4、圖5中標(biāo)出了a~h及o點(diǎn)的位置,在各拐點(diǎn)處電磁力變化較大。圖4為額定負(fù)載運(yùn)行時(shí)斷條前后轉(zhuǎn)子槽前側(cè)電磁力分布。由圖4a可知,健康情況時(shí)轉(zhuǎn)子槽前側(cè)的ab及bc區(qū)所受電磁力較大,其他區(qū)域除a、b、c、d點(diǎn)外受力不大;圖4b為故障后順時(shí)針臨近斷條處的轉(zhuǎn)子槽前側(cè)受力情況,相較于圖4a可知,ab區(qū)受力有所變化,bc及do區(qū)受力變化不大(除拐點(diǎn)外),cd區(qū)磁應(yīng)力明顯增大。圖5為斷條前后轉(zhuǎn)子槽后側(cè)所受電磁力分布,斷條后磁應(yīng)力變化規(guī)律與前側(cè)相似,但與前側(cè)受力情況相比,數(shù)值較小。
1.5.3 轉(zhuǎn)子徑向力分布
圖6為轉(zhuǎn)子徑向力的作用位置。圖7為斷條前后轉(zhuǎn)子徑向電磁力的分布,圖中標(biāo)出了圖6中關(guān)鍵點(diǎn)的位置,其中圖7b為順著樣機(jī)旋轉(zhuǎn)方向斷條和臨近斷條之間圓弧上的徑向電磁力分布情況。由圖7可知,靠近槽前側(cè)圓弧所受應(yīng)力值大于槽后側(cè),即ia段受力大于ej段,斷條時(shí)轉(zhuǎn)子徑向力大于健康情況。
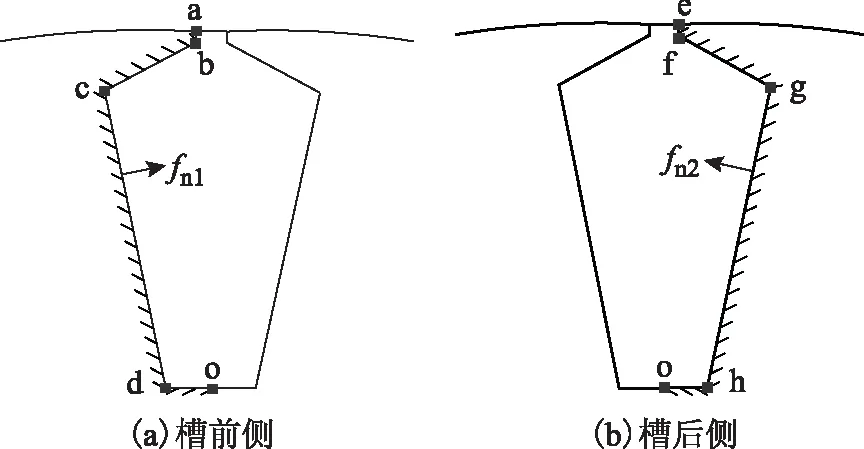
圖3 轉(zhuǎn)子槽一周法向力分布位置示意圖Fig.3 Schematic diagram of normal electromagnetic force distribution on the border of the rotor slots
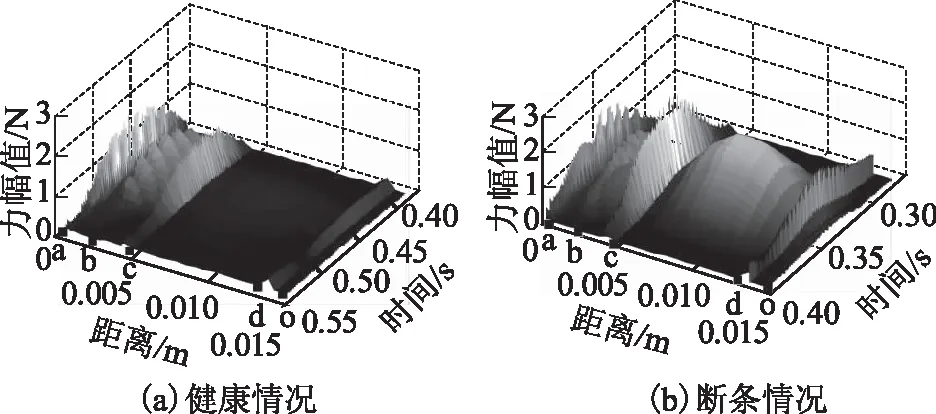
圖4 斷條前后轉(zhuǎn)子槽前側(cè)槽一周法向力分布Fig.4 Distribution of normal electromagnetic force on the front side border of the rotor slots before and after broken bars
圖5 斷條前后轉(zhuǎn)子槽后側(cè)槽一周法向力分布Fig.5 Distribution of normal electromagnetic force on the rear side border of the rotor slots before and after broken bars
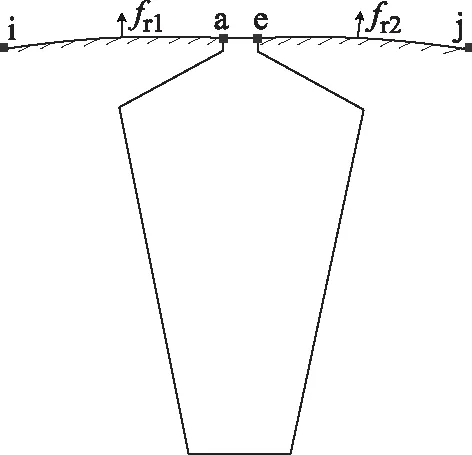
圖6 轉(zhuǎn)子徑向力分布位置示意圖Fig.6 Schematic diagram of radial electromagnetic force on rotor
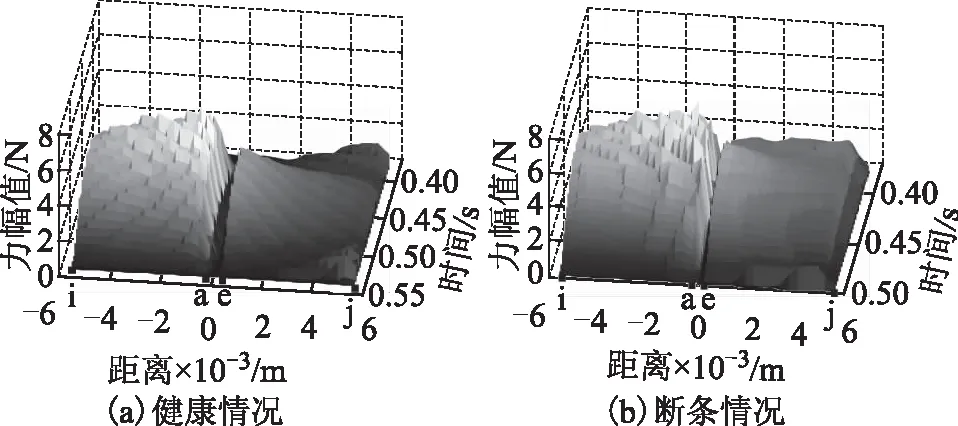
圖7 斷條前后轉(zhuǎn)子徑向力分布Fig.7 Distribution of radial electromagnetic force on rotor before and after broken bars
1.5.4 轉(zhuǎn)子洛倫茲力分布
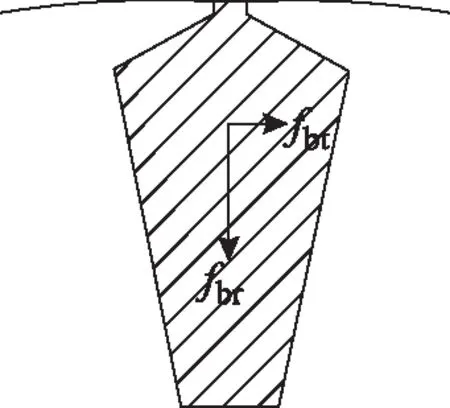
圖8 轉(zhuǎn)子洛倫茲力的切向和法向力Fig.8 Tangential and normal of the rotor lorentz force
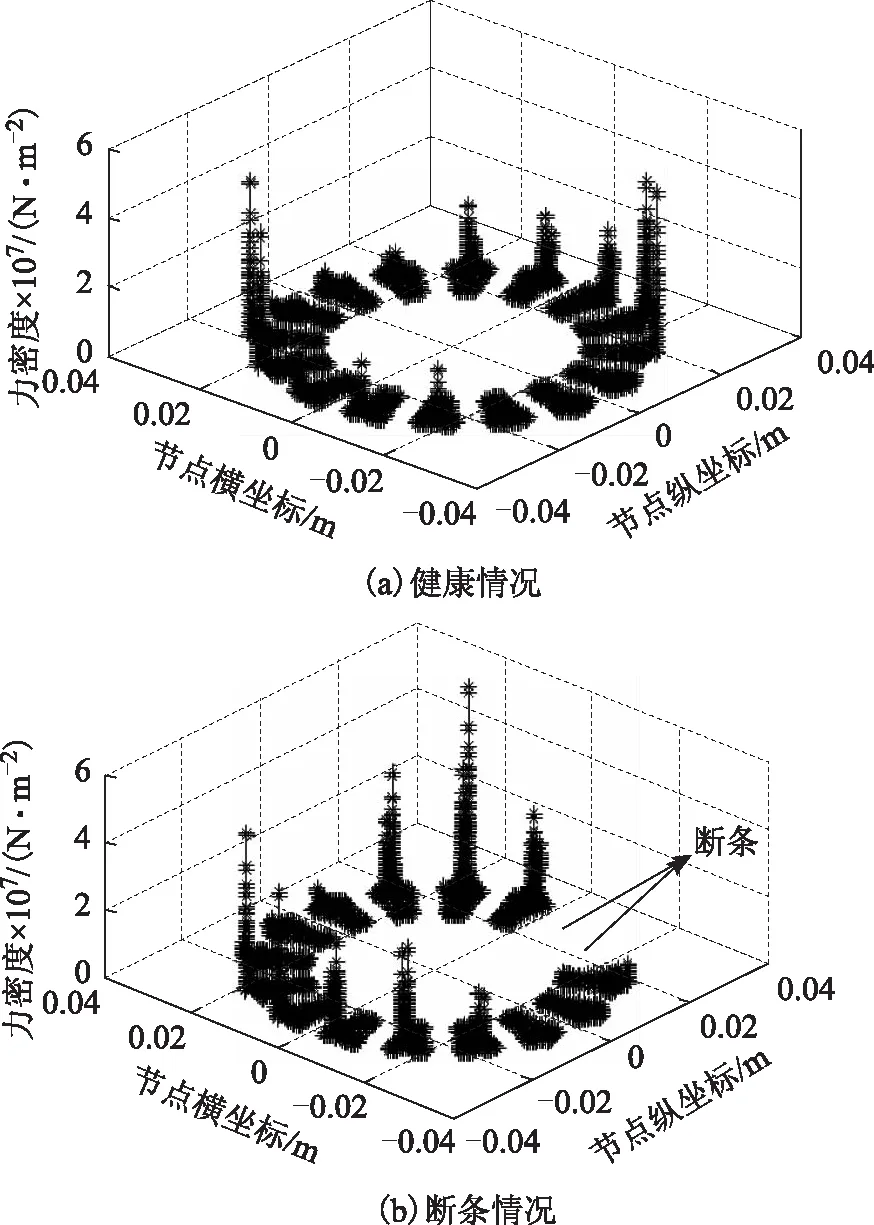
圖9 斷條前后轉(zhuǎn)子洛倫茲力分布(t=0.38 s)Fig.9 Distribution of the rotor lorentz force before and after broken bars (t=0.38 s)
轉(zhuǎn)子洛倫茲力的切向和法向力如圖8所示。圖9為電動(dòng)機(jī)在額定負(fù)載運(yùn)行情況下,0.38 s時(shí)斷條前后轉(zhuǎn)子導(dǎo)條洛侖茲力密度分布情況。由圖9可知,某一時(shí)刻下各導(dǎo)條所受洛侖茲力并不相同,且每一根導(dǎo)條受力幅值較大的位置出現(xiàn)在導(dǎo)條頂部。轉(zhuǎn)子健康運(yùn)行時(shí)洛倫茲力分布對(duì)稱(chēng),故障發(fā)生后斷條處沒(méi)有該力的作用,斷條位置順著旋轉(zhuǎn)方向一側(cè)的導(dǎo)條產(chǎn)生了不同程度的洛侖茲力畸變,且非對(duì)稱(chēng)性明顯,即與斷裂導(dǎo)條相鄰的導(dǎo)條所受洛倫茲力增加明顯,這種交替變化且增加明顯的洛倫茲力將會(huì)增大導(dǎo)條疲勞斷裂的可能性。
2 轉(zhuǎn)子結(jié)構(gòu)靜力學(xué)有限元計(jì)算及分析
2.1 結(jié)構(gòu)力學(xué)
結(jié)構(gòu)靜力學(xué)分析是指不考慮慣性和阻尼特性,不考慮隨時(shí)間變化的載荷等因素的條件下,系統(tǒng)在穩(wěn)定載荷作用下對(duì)結(jié)構(gòu)進(jìn)行應(yīng)力、應(yīng)變和位移的分析,但允許有如重力和離心力等穩(wěn)定的慣性載荷作用,隨時(shí)間變化的載荷可等效為靜態(tài)載荷,進(jìn)行靜態(tài)分析。本文對(duì)籠型轉(zhuǎn)子結(jié)構(gòu)靜力學(xué)進(jìn)行研究,以上述計(jì)算結(jié)果中某些時(shí)刻的電磁力作為三維結(jié)構(gòu)靜力學(xué)載荷,從而得到故障前后轉(zhuǎn)子的形變情況。
結(jié)構(gòu)靜力學(xué)模型中建立了端環(huán),完善了轉(zhuǎn)子模型。本文并未深入研究端環(huán)的受力情況,主要原因有電動(dòng)機(jī)端部區(qū)域邊界和電流分布較為復(fù)雜,且端部磁場(chǎng)是時(shí)變場(chǎng),它在有關(guān)部件中會(huì)感應(yīng)渦流,且端部磁場(chǎng)在計(jì)算時(shí)會(huì)由于一系列原因而產(chǎn)生誤差,包括模型簡(jiǎn)化、計(jì)算方法、網(wǎng)格剖分不夠精確等,這樣更降低了端部磁場(chǎng)計(jì)算的準(zhǔn)確性,另端部電磁力作用較小,對(duì)模型的形變影響不大,因此本文不單獨(dú)計(jì)算端部的受力情況[17,18]。此外在二維電磁場(chǎng)計(jì)算過(guò)程中,通過(guò)式(2)、式(3)計(jì)及了端部的影響,參見(jiàn)文獻(xiàn)[16]。
在工程計(jì)算中對(duì)于剛體的微小形變通常視為彈性形變,因此本文應(yīng)力和形變的關(guān)系遵循彈性力學(xué)的規(guī)律。結(jié)構(gòu)靜態(tài)分析的整體平衡方程如式(6)或式(7)所示,通過(guò)方程(6)便可得到節(jié)點(diǎn)位移矢量u。
Ku=F
(6)
或
Ku=Fa+Fr
(7)
2.2 結(jié)構(gòu)靜力學(xué)計(jì)算模型
對(duì)有限元分析來(lái)說(shuō),確定有限元單元類(lèi)型非常重要,單元類(lèi)型的選擇不僅影響網(wǎng)格的合理劃分,而且對(duì)求解的精度影響很大。考慮到轉(zhuǎn)子模型的復(fù)雜程度、精度要求以及計(jì)算求解時(shí)間等實(shí)際因素,采用Solid186空間實(shí)體單元,以電磁場(chǎng)計(jì)算的二維模型網(wǎng)格為基礎(chǔ),運(yùn)用延伸分網(wǎng)的方法生成三維模型和網(wǎng)格,以此實(shí)現(xiàn)載荷加載時(shí)節(jié)點(diǎn)的對(duì)應(yīng),建立端環(huán)并分網(wǎng),在導(dǎo)條與端環(huán)接觸的位置添加接觸單元,以達(dá)到使兩者形變連續(xù)的目的。在轉(zhuǎn)子鐵心內(nèi)圓表面施加面約束,以代替轉(zhuǎn)軸的作用。
為了縮短計(jì)算時(shí)間,分別計(jì)算槽一周法向力和徑向力共同作用及洛倫茲力單獨(dú)作用的情況。選取0.395s時(shí)健康和斷條電磁力數(shù)據(jù)進(jìn)行計(jì)算,載荷施加示意圖如圖10、圖11所示。
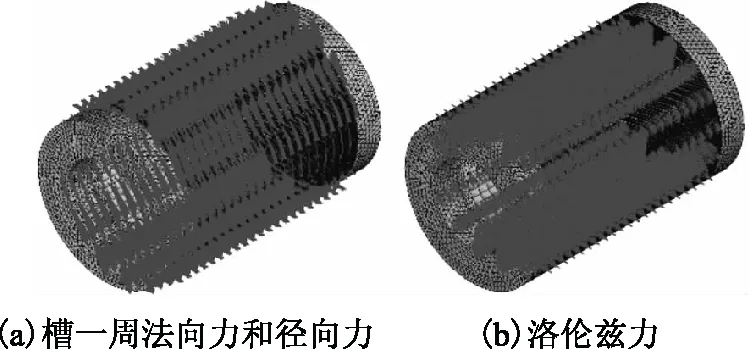
圖10 轉(zhuǎn)子電磁力載荷軸向示意圖Fig.10 Axial direction schematic diagram of electromagnetic force on the rotor
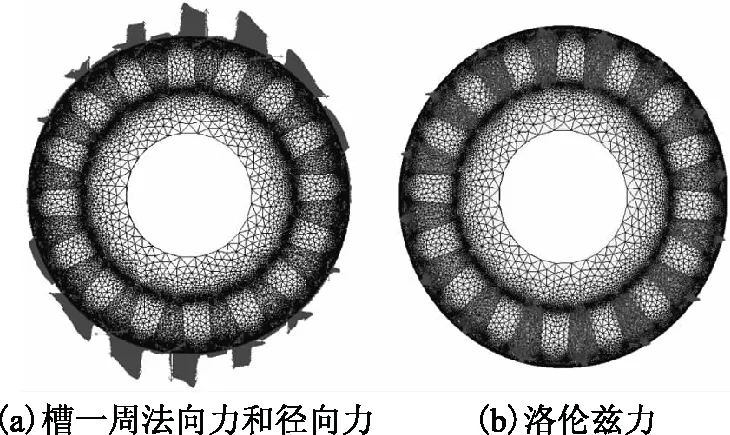
圖11 轉(zhuǎn)子電磁力載荷x、y方向示意圖Fig.11 x、y direction schematic diagram of electromagnetic force on the rotor
2.3 轉(zhuǎn)子結(jié)構(gòu)靜力學(xué)結(jié)果分析
2.3.1 計(jì)及槽一周法向力和轉(zhuǎn)子徑向力的計(jì)算結(jié)果
圖12為槽一周法向力和轉(zhuǎn)子徑向力共同作用下轉(zhuǎn)子斷條前后形變圖,圖中健康轉(zhuǎn)子形變對(duì)稱(chēng),斷條發(fā)生后,順時(shí)針臨近斷條的區(qū)域形變加大,從端環(huán)處也可看出形變失去對(duì)稱(chēng)性。轉(zhuǎn)子導(dǎo)條及端環(huán)形變?nèi)鐖D13所示,導(dǎo)條和端環(huán)連接處形變連續(xù),此處也是形變較大位置,斷條后這一現(xiàn)象更加明顯,形變最大值為1.11×10-7m。
為了更清楚的觀察轉(zhuǎn)子的形變大小和趨勢(shì),取圖12模型的部分?jǐn)?shù)據(jù)點(diǎn)做成周向和軸向位移曲線圖,所取數(shù)據(jù)點(diǎn)如圖14所示。周向圖分別取每根導(dǎo)條上各槽相同位置點(diǎn),圖15為斷條前后轉(zhuǎn)子槽前側(cè)A1、B1、C1三點(diǎn)的形變曲線,健康時(shí)形變呈兩極對(duì)稱(chēng)分布,因此曲線表現(xiàn)為周期變化,A1及B1處形變較大,C1處形變相對(duì)較小。斷條后槽前側(cè)形變大于健康情況,斷條及靠近斷條處各點(diǎn)的形變明顯增大,其中A1及B1形變?cè)隽看笥贑1處,形變曲線呈非周期變化。斷條前后轉(zhuǎn)子槽后側(cè)的形變曲線的變化趨勢(shì)與槽前側(cè)相近(見(jiàn)圖16)。軸向圖取包括端環(huán)在內(nèi)的同一軸向上的數(shù)據(jù)點(diǎn),如圖17所示,導(dǎo)條和端環(huán)連接處形變較大,且斷條情況下的形變大于健康情況。
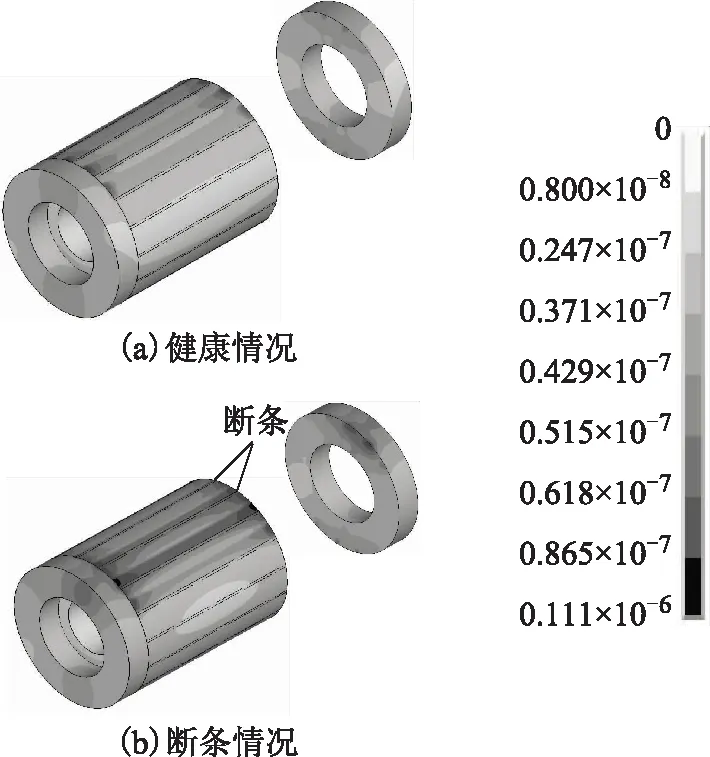
圖12 斷條前后轉(zhuǎn)子形變?cè)茍DFig.12 The displacement of the rotor before and after broken bars
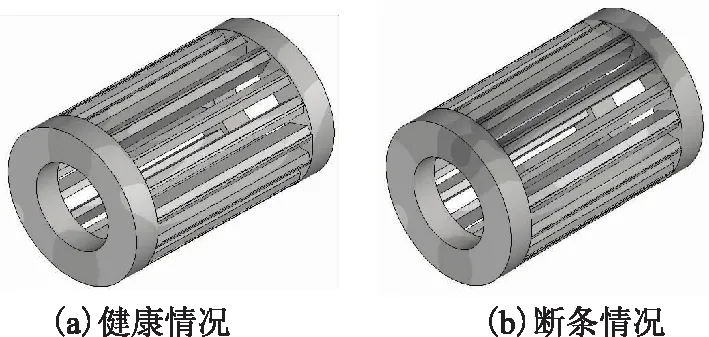
圖13 斷條前后轉(zhuǎn)子導(dǎo)條及端環(huán)形變?cè)茍DFig.13 The displacement of the rotor bar and ending before and after broken bars
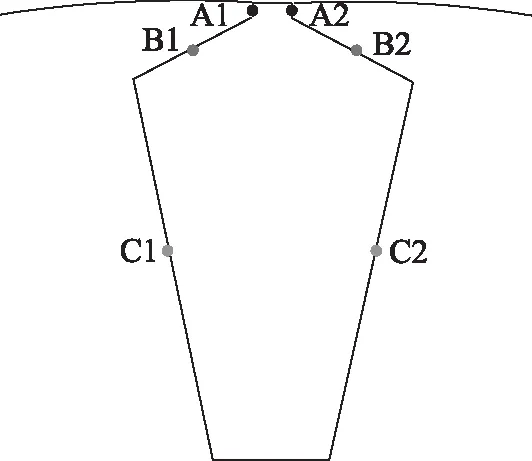
圖14 位移曲線數(shù)據(jù)點(diǎn)的選取Fig.14 The data points of the displacement curve
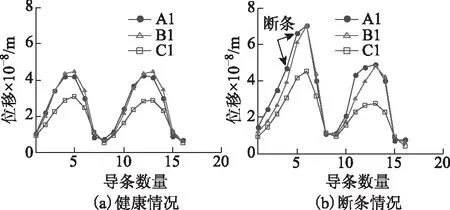
圖15 轉(zhuǎn)子槽前側(cè)周向形變曲線Fig.15 Circumferential displacement curve of the front side of rotor slots
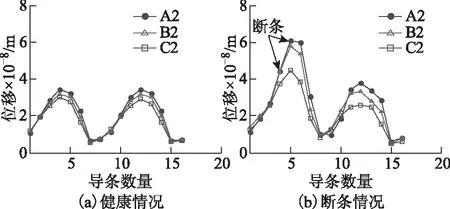
圖16 轉(zhuǎn)子槽后側(cè)周向形變曲線Fig.16 Circumferential displacement curve of the rear side of rotor slots
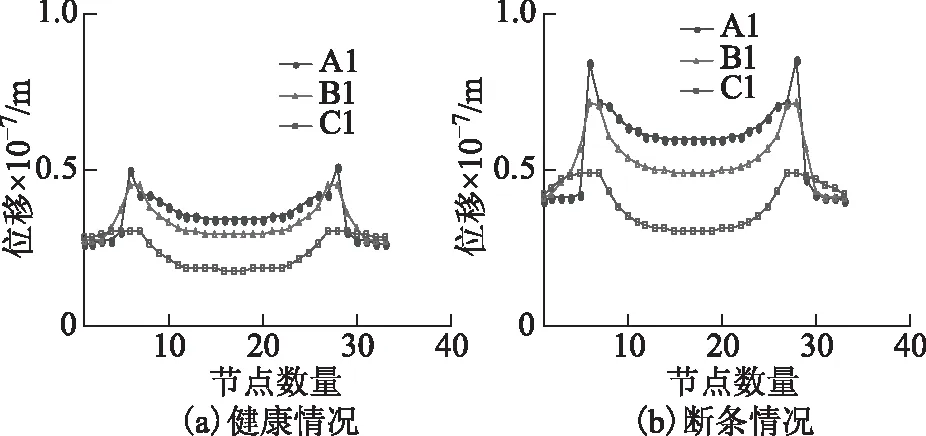
圖17 轉(zhuǎn)子軸向形變曲線Fig.17 Axial displacement curve of the rotor
2.3.2 計(jì)及洛倫茲力計(jì)算結(jié)果
洛倫茲力單獨(dú)作用的轉(zhuǎn)子斷條前后形變圖如圖18、圖19所示,由圖可知,斷條后形變大于斷條前,且呈不對(duì)稱(chēng)分布,斷條附近導(dǎo)條形變?cè)黾樱畲笮巫內(nèi)猿霈F(xiàn)在端環(huán)和導(dǎo)條連接處,大小為8.84×10-10m,所以洛倫茲力作用明顯小于另兩種力共同作用。
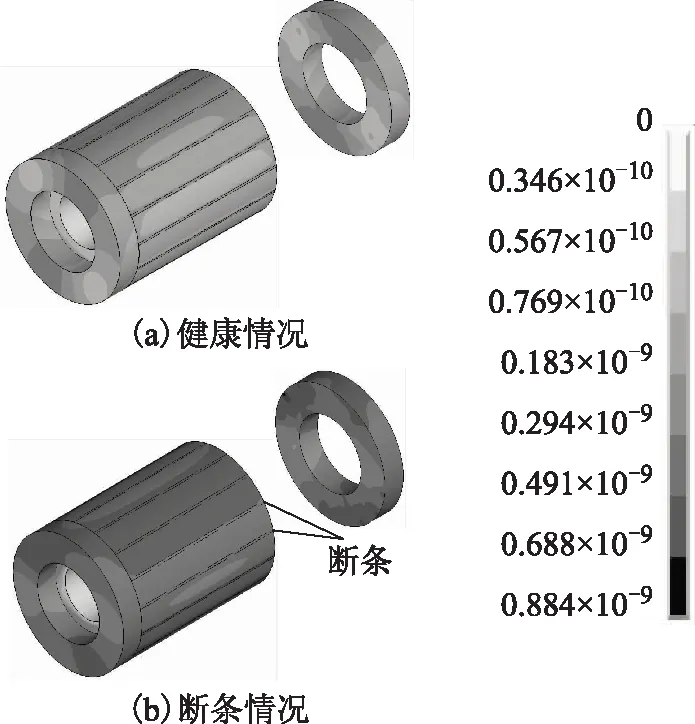
圖18 斷條前后轉(zhuǎn)子形變?cè)茍DFig.18 The displacement of the rotor before and after broken bars
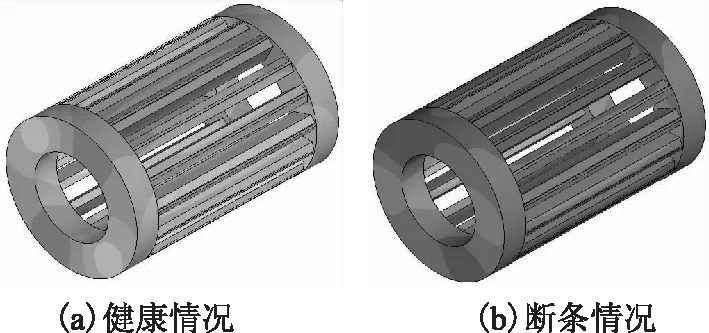
圖19 斷條前后轉(zhuǎn)子導(dǎo)條及端環(huán)形變?cè)茍DFig.19 The displacement of the rotor bar and ending before and after broken bars
圖20為洛倫茲力形變曲線所取數(shù)據(jù)點(diǎn)的位置,周向和軸向形變曲線如圖21、圖22所示。圖21中,斷條處不受洛倫茲力作用,但會(huì)因模型形變產(chǎn)生的壓力作用而發(fā)生一定的變形,轉(zhuǎn)子健康時(shí)形變較小,故障后斷條附近導(dǎo)條形變發(fā)生變化破壞了形變周期性。圖22中,槽口及靠近槽口區(qū)域在斷條發(fā)生后形變明顯變大。
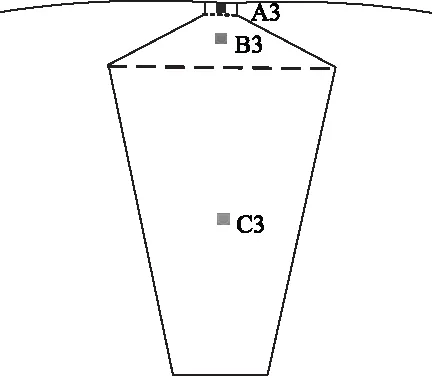
圖20 位移曲線數(shù)據(jù)點(diǎn)的選取Fig.20 The Selection of data points of displacement curve
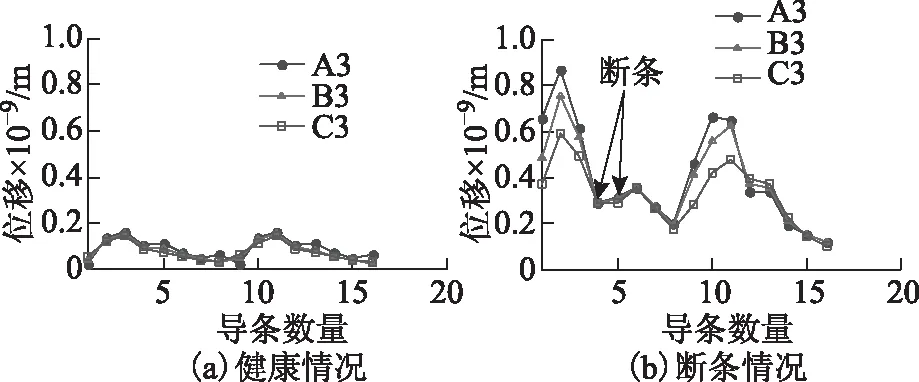
圖21 洛侖茲力轉(zhuǎn)子周向形變曲線Fig.21 Circumferential displacement curve of the rotor by the lorentz force
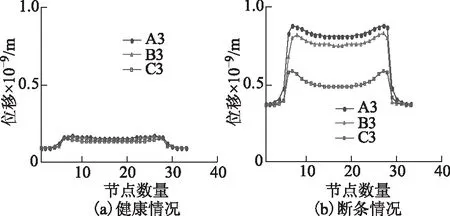
圖22 洛侖茲力轉(zhuǎn)子軸向形變曲線Fig.22 Axial displacement curve of the rotor by the lorentz force
3 結(jié)論
本文結(jié)合麥克斯韋張量法和洛倫茲力原理,運(yùn)用有限元法計(jì)算了籠型異步電動(dòng)機(jī)轉(zhuǎn)子斷條前后的電磁力,通過(guò)轉(zhuǎn)矩計(jì)算值與實(shí)驗(yàn)值的比較,確定了電磁應(yīng)力結(jié)果的正確性。將計(jì)算所得電磁力作為載荷分析籠型轉(zhuǎn)子斷條故障前后形變規(guī)律。根據(jù)上述計(jì)算和分析得出針對(duì)Y802-2型2極電動(dòng)機(jī)的結(jié)論如下:
1)電動(dòng)機(jī)非故障運(yùn)行時(shí),在轉(zhuǎn)子槽的槽口兩側(cè)圓弧、槽口及靠近槽口處所受電磁力較大,槽前側(cè)受力大于槽后側(cè),故障后順時(shí)針臨近斷條的轉(zhuǎn)子槽口及靠近槽底處受力增加;洛倫茲力在導(dǎo)條頂部作用明顯,正常運(yùn)行時(shí)應(yīng)力呈兩極對(duì)稱(chēng)分布,故障后斷條附近導(dǎo)條所受應(yīng)力發(fā)生畸變且增大明顯。
2)在轉(zhuǎn)子槽一周法向力和轉(zhuǎn)子徑向力的共同作用下,健康轉(zhuǎn)子形變對(duì)稱(chēng),槽口及靠近槽口處形變較大,端環(huán)和導(dǎo)條連接處形變連續(xù)且形變量大于軸向其他位置,故障后斷條附近導(dǎo)條的轉(zhuǎn)子槽口及靠近槽口處形變?cè)黾樱S向上形變也有所增加;洛倫茲力單獨(dú)作用下,健康轉(zhuǎn)子形變較小,故障后斷條附近的導(dǎo)條頂部形變明顯增加。
3)電動(dòng)機(jī)正常運(yùn)行時(shí),轉(zhuǎn)子槽口及靠近槽口處所受應(yīng)力和形變較大,故障發(fā)生后這一情況更加明顯,尤其電動(dòng)機(jī)在起動(dòng)過(guò)程中轉(zhuǎn)子電磁應(yīng)力和形變的增量遠(yuǎn)大于穩(wěn)定運(yùn)行時(shí),在應(yīng)力低于材料屈服應(yīng)力和強(qiáng)度極限的前提下,這種增加明顯的電磁力和形變將會(huì)增大導(dǎo)條頂部疲勞斷裂的可能性,造成連續(xù)斷條的發(fā)生。
4)基于轉(zhuǎn)子電磁力及結(jié)構(gòu)靜力學(xué)的研究和分析,可推測(cè)出進(jìn)一步斷條位置為順時(shí)針臨近斷條的導(dǎo)條頂部,且易發(fā)生在端環(huán)和導(dǎo)條連接處,此結(jié)論與工程實(shí)際情況相符合。
繼本文研究?jī)?nèi)容之后,將對(duì)轉(zhuǎn)子進(jìn)行瞬態(tài)動(dòng)力學(xué)的計(jì)算,以得到轉(zhuǎn)子形變隨時(shí)間的變化及應(yīng)力應(yīng)變關(guān)系。結(jié)合轉(zhuǎn)子導(dǎo)條材料的S-N曲線及疲勞損傷規(guī)則等對(duì)轉(zhuǎn)子進(jìn)行疲勞分析,以得到本文籠型感應(yīng)電動(dòng)機(jī)的疲勞損傷系數(shù)及疲勞壽命分布,估測(cè)籠型感應(yīng)電動(dòng)機(jī)的使用壽命,為工程實(shí)用提供參考。
[1] Mizia J,Adamiak K,Eastham A R,et al.Finite element force calculation comparison of methods for electric machines[J].IEEE Transactions on Magnetics,1988,24(1):447-450.
[2] Ren Z.Comparison of different force calculation methods in 3d finite element modelling[J].IEEE Transactions on Magnetics,1994,30(5):3471-3474.
[3] Kovanen T,Tarhasaari T,Kettunen L.Computation of local electromagnetic force[J].IEEE Transactions on Magnetics,2011,47(5):894-897.
[4] Lee S H,Park I H,Lee K S.Comparison of mechanical deformations due to different force distributions of two equivalent magnetization models[J].IEEE Transactions on Magnetics,2000,34(4):1368-1372.
[5] Lee S H,Han S J,Choi H S,et al.Magnetic force distributions in saturated magnetic system using magnetic charge method and other methods[J].IEEE Transactions on Applied Superconductivity,2004,14(2):682-685.
[6] 李志強(qiáng),羅應(yīng)立,蒙亮.基于有限元的虛位移原理在汽輪發(fā)電機(jī)局部電磁力計(jì)算中的應(yīng)用[J].中國(guó)電機(jī)工程學(xué)報(bào),2007,27(15):47-52. Li Zhiqiang,Luo Yingli,Meng Liang.The calculation of local magnetic force in turbo-generator with FEM based virtual work principle[J].Proceedings of the CSEE,2007,27(15):47-52.
[7] 李志強(qiáng),羅應(yīng)立.基于有限元和虛位移原理的電機(jī)內(nèi)電磁力密度計(jì)算新方法[J].中國(guó)電機(jī)工程學(xué)報(bào),2009,29(3):71-77. Li Zhiqiang,Luo Yingli.New method of magnetic force density computation for turbo-generator based on finite element method and virtual work principle[J].Proceedings of the CSEE,2009,29(3):71-77.
[8] 曹鑫,鄧智泉,楊鋼,等.無(wú)軸承開(kāi)關(guān)磁阻電機(jī)麥克斯韋應(yīng)力法數(shù)學(xué)模型[J].中國(guó)電機(jī)工程學(xué)報(bào),2009,29(3):78-83. Cao Xin,Deng Zhiquan,Yang Gang,et al.Mathematical model of bearingless switched reluctance motors based on maxwell stress tensor method[J].Proceedings of the CSEE,2009,29(3):78-83.
[9] Kovanen T,Tarhasaari T,Kettunen L.Localization of electromagnetic force based on material models[J].IEEE Transactions on Magnetics,2012,48(1):13-17.
[10]Stancheva R D,Iatcheva I I.3-D electromagnetic force distribution in the end region of turbogenerator[J].IEEE Transactions on Magnetics,2009,45(3):1000-1003.
[11]梁艷萍,劉金鵬,陳晶.大型感應(yīng)電動(dòng)機(jī)單相短路故障動(dòng)態(tài)力計(jì)算[J].中國(guó)電機(jī)工程學(xué)報(bào),2012,32(9):109-115. Liang Yanping,Liu Jinpeng,Chen Jing.Dynamic electromagnetic force calculation for single-phase short circuit fault of large induction motors[J].Proceedings of the CSEE,2012,32(9):109-115.
[12]王荀,邱阿瑞.籠型異步電動(dòng)機(jī)徑向電磁力波的有限元計(jì)算[J].電工技術(shù)學(xué)報(bào),2012,27(7):109-117.Wang Xun,Qiu Arui.Finite element calculation of radial electromagnetic force wave in squirrel-cage asynchronous motors[J].Transactions of China Electrotechnical Society,2012,27(7):109-117.
[13]毛文貴,傅彩明,譚加才.大功率立式電機(jī)轉(zhuǎn)子有限元結(jié)構(gòu)分析和優(yōu)化[J].電機(jī)技術(shù),2007(1):22-24. Mao Wengui,F(xiàn)u Caiming,Tan Jiacai.FEM structure analysis and optimization of vertical motor rotor[J].Electric Motor Technology,2007(1):22-24.
[14]程文杰,耿海鵬,馮圣,等.高速永磁同步電機(jī)轉(zhuǎn)子強(qiáng)度分析[J].中國(guó)電機(jī)工程學(xué)報(bào),2010,32(27):87-94.Cheng Wenjie,Geng Haipeng,F(xiàn)eng Sheng,et al.Rotor strength analysis of high-speed permanent magnet synchronous motors[J].Proceedings of the CSEE,2010,32(27):87-94.
[15]王劍,胡錫幸,郭吉豐.基于柔性板簧的三自由度球形超聲波電機(jī)靜力學(xué)建模與分析[J].電工技術(shù)學(xué)報(bào),2014,29(3):125-131. Wang Jian,Hu Xixing,Guo Jifeng.Statics modeling and analyzing of three-degree-of-freedom spherical ultrasonic motors with the spiral spring[J].Transactions of China Electrotechnical society,2014,29(3):125-131.
[16]湯蘊(yùn)璆.電機(jī)內(nèi)的電磁場(chǎng)[M].2 版.北京:機(jī)械工業(yè)出版社,1998:265-278,341-367.
[17]梁艷萍,王鴻鵠,張建濤.空冷汽輪發(fā)電機(jī)端部電磁場(chǎng)與渦流損耗研究[J].電機(jī)與控制學(xué)報(bào),2010,14(1):29-34. Liang Yanping,Wang Honghu,Zhang Jiantao.Research of end fields and eddy current losses for air-cooling steam-turbo-generator[J].Electric Machines and Control,2010,14(1):29-34.
[18]黃濤,阮江軍,張宇嬌,等.多相異步電機(jī)端部繞組電磁與結(jié)構(gòu)耦合場(chǎng)分析[J].大電機(jī)技術(shù),2011(3):1-4. Huang Tao,Ruan Jiangjun,Zhang Yujiao,et al.Magneto-structural coupling field analysis on the end winding of multi-phase asynchronous motor[J].Large Electric Technology,2011(3):1-4.
Electromagnetic Force Calculation and Structural Static Analysis on the Rotor of Squirrel-cage Induction Motors Before and After the Broken Bars Fault
XieYing1FengChunshuang1YangZhongxue2LiuHaisong1WangZe1
(1.School of Electrical & Electronic Engineering Harbin University of Science and Technology Harbin 150080 China 2.School of Electrical Engineering&Information Northeast Petroleum University Daqing 163318 China)
Takingthe Y802-2 type squirrel-cage induction motor asan example,the electromagnetic force and structural static on the rotor are researched when the motor operates with the broken bars fault.Based on the results of the two-dimensional transient magnetic field,the magnetic force iscalculated by the Maxwell tensor method and the principle of the Lorentz force.Then the change patterns with time of the rotor electromagnetic force are given before and after the broken bars fault.In addition,the validity of the calculated results is confirmed through comparing with the ones measuredin the experiments.Using the calculated electromagnetic forceas the load,the structural static of the rotor in the steady state is studied afterwards.The fault deformation distribution on the rotor is then achieved.The further evolution trend of the broken bars fault can be speculated by the rotor electromagnetic force and the change of displacement before and after the fault.
Induction motor,broken bars fault,finite element method,electromagnetic force,structural static,fault deformation
國(guó)家自然科學(xué)基金(51107022)、黑龍江省政府博士后科研啟動(dòng)項(xiàng)目(LBH-Q12061)、黑龍江省普通高等學(xué)校新世紀(jì)優(yōu)秀人才培養(yǎng)計(jì)劃(1252-NCET-015)、黑龍江省自然科學(xué)基金(E201443)、人社部留學(xué)人員科技活動(dòng)項(xiàng)目擇優(yōu)資助項(xiàng)目和哈爾濱市科技創(chuàng)新人才研究專(zhuān)項(xiàng)資金項(xiàng)目(RC2014QN007005)資助。
2015-01-30 改稿日期2015-06-02
TM343
謝 穎 女,1974年生,教授,碩士生導(dǎo)師,研究方向?yàn)殡姍C(jī)內(nèi)電磁場(chǎng)、溫度場(chǎng)、振動(dòng)噪聲計(jì)算及感應(yīng)電動(dòng)機(jī)故障診斷及檢測(cè)。(通信作者)
馮春爽 女,1991年生,碩士研究生,研究方向?yàn)楣收想姍C(jī)電磁場(chǎng)、結(jié)構(gòu)學(xué)、疲勞斷裂分析。
猜你喜歡
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(hào)(2016年4期)2016-06-01 12:10:19
電測(cè)與儀表(2016年5期)2016-04-22 01:13:50
汽車(chē)維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車(chē)維修與保養(yǎng)(2015年8期)2015-04-17 03:32:52
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維修與保養(yǎng)(2015年7期)2015-04-17 02:12:40
汽車(chē)維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39