電力系統主動解列的可行解列時窗研究
2015-04-14 06:28:42郭一忱VladimirTerzija
電工技術學報 2015年12期
丁 磊 郭一忱 陳 青 Vladimir Terzija,
電力系統主動解列的可行解列時窗研究
丁 磊1郭一忱1陳 青1Vladimir Terzija1,2
(1. 電網智能化調度與控制教育部重點實驗室(山東大學) 濟南 250061 2. The University of Manchester, Manchester, UK, M13 9PL)
解列時刻是決定解列是否成功的關鍵因素。常規解列研究基于解列前的靜態潮流信息,對動態過程中的穩定性問題利用強假設進行規避,忽略解列時刻的研究。本文首次對主動解列的解列時刻問題展開系統性分析,利用暫態能量函數量化解列動態過程中孤島的穩定性,利用孤島失穩的臨界能量確定暫態穩定意義下的可行解列時窗,以保證解列后孤島的暫態穩定性。研究表明,因擾動背景不同,孤島的可行解列時窗呈現出:任何時刻均可解列、小于某個臨界時刻、大于某個臨界時刻、呈現斷續的時窗特征以及可行解列時窗為空等五種不同的情況。本文首次從機理上解釋和刻畫主動解列的解列時刻特征,為進一步研究主動解列問題提供了新的思路和支撐。
主動解列 可行解列時窗 穩定域 暫態能量函數
1 引言
主動解列(Controlled islanding)是指為有效避免和限制大停電的發生,利用廣域測量系統WAMS(Wide Area Measurement System)在線獲取系統實時信息,在電網受到嚴重擾動、無法繼續完整運行時,將系統解列為多個穩定運行的孤島的控制方式。一個完整的解列策略應當包括:判斷是否解列、確定解列斷面以及確定解列時刻。
“判斷是否解列”即系統故障后的暫態穩定評估問題這一傳統課題已經有較多的研究。文獻[1]提出利用決策樹和動態安全評估對系統進行解列前的暫態穩定評估。文獻[2,3]提出利用OMIB(單機無窮大母線)模型和EEAC(擴展等面積法則)來判斷是否需要解列并識別機組分群。
目前對主動解列的研究主要側重于“確定解列斷面”這一問題。文獻[4-9]分別提出了OBDD法(二元有序決策圖)、弱連接法、譜聚類法、啟發式搜索算法和混合整數規劃等方法對解列斷面的選取進行建模求解。這些方法大多基于解列前的靜態潮流信息,僅考慮孤島內的發電機需要保持同調和孤島內有功功率近似平衡這些穩態和準穩態的約束條件,對動態過程中的穩定問題則利用強假設(假設同調機群在解列過程中不會失穩以及解列后的孤島能夠穩定運行)進行規避。
在判斷出需要解列并確定解列斷面以后,解列的操作時刻將成為解列是否成功的關鍵因素。如果在正確的時刻進行解列,可以平穩過渡到穩定的孤島運行;如果錯過了正確的解列時刻,解列后孤島無法穩定運行,會造成解列失敗和系統崩潰。
由于常規解列研究對解列動態過程中的穩定問題做了強假設,假設同調機群在解列過程中不會失穩,解列時刻問題一直沒有得到充分研究。文獻[10]從解列后子系統積聚動能大小的角度分析系統的解列時刻,認為解列時刻應采取盡可能快的原則才更有利于故障后子系統暫態穩定的恢復。該文獻是目前能檢索到的研究解列操作時刻的少數文獻之一,但其出發點仍然是先假定孤島內的發電機群強同調,再從減小孤島等值發電機積聚動能的角度考慮解列時刻,并沒有考慮解列過程中孤島內部發電機同步性對解列時刻的要求。
本文首次對主動解列的解列時刻展開系統性分析,把主動解列時刻的確定劃分為兩個階段。第一階段,從暫態穩定和穩定域的角度對解列時刻進行解釋和分析,研究解列過程中孤島內部發電機同步性對解列時刻的要求;通過能量函數法對給定擾動事件背景和解列策略的系統進行量化分析,刻畫單個孤島和整個系統的可行解列時窗的分布特征。第二階段,在保證孤島內部同調性和穩定性的基礎上,考慮孤島慣量中心的頻率偏移,對可行解列時窗進一步修正。本文的研究重點是第一階段,即確定暫態穩定意義下的可行解列時窗。
2 穩定性和暫態能量函數
2.1穩定和穩定域定義
自治非線性動力系統的動力微分方程可以表示為x˙=f[x(t)],x∈Rn,t0時刻從x0= x(t0)開始的系統軌跡記作φ(x,t),系統的平衡點定義為x?∈f(x?)= 0[11]。
李雅普諾夫穩定:對t≥t0,若任意?x∈Rn的鄰域U,都存在一個?x的鄰域V,使從鄰域V中任意一點出發的系統軌跡φ(x,t)∈U,則稱?x是穩定的。
漸進穩定:對t≥t0,存在?x∈Rn的鄰域U,使從鄰域U中任意一點出發的系統軌跡φ(x,t)∈U且趨近于?x,則稱?x是漸進穩定的。
穩定域:穩定平衡點(Stable Equilibrium Point, SEP)xs的穩定域(或吸引域)A(xs) 定義為所有滿足limt→∞φ(x,t)→xs的x點的集合,其邊界定義為穩定邊界s()Ax?。
2.2暫態能量函數和主導UEP
電力系統經受大擾動后的暫態穩定性可以通過時域仿真、擴展等面積法則和暫態能量函數法等方法進行評估。基于暫態能量函數法的暫態穩定性評估包括以下步驟[11]:
1. 構造故障后系統的暫態能量函數V(x)
2. 計算臨界能量Vcr
3. 計算系統在擾動最后時刻即故障切除瞬間的暫態能量Vcl;
4. 通過比較Vcl和Vcr直接判斷系統的暫態穩定性,如果Vcl>Vcr,則系統不穩定,否則系統穩定。兩者之間的差Vcl-Vcr稱為能量裕度或穩定裕度。
從穩定和穩定域理論的角度,上述步驟可以理解為計算故障后系統的穩定平衡點的穩定域(吸引域),并判斷故障清除時刻的系統狀態是否處于穩定域內。
應用暫態能量函數法最困難的一步是要計算臨界能量Vcr,利用恒值能量曲面(x|V(x)=Vcr)來近似估計穩定邊界s()Ax?。主導UEP法基于擾動后的系統軌跡從某個UEP附近逸出穩定域這一規律,利用主導不平衡點(Controlling Unstable Equilibrium Point, CUEP)處的能量作為臨界能量。計算過程分為兩步:識別擾動模式和數值計算CUEP。
識別擾動模式或失穩模式,即識別失穩的臨界機組,通常通過時域仿真來識別。CUEP是與擾動模式相關的UEP,和SEP一樣都是潮流方程的解,可利用牛頓法來求解,區別主要是初值的選取不同。本文選用BCU法來數值求解CUEP。
3 主動解列的可行解列時刻
3.1可行解列時窗的特征
解列的過程非常復雜,涵蓋了解列前的系統失穩階段和解列后的孤島過渡階段,解列前的場景變化(拓撲結構、運行方式、擾動位置等)和解列過程中的參數變化(擾動持續時間、解列地點、解列時刻等)都會引起不同的解列動態過程和響應,但其中的暫態穩定問題都可以用穩定和穩定域的理論予以分析和解釋。
從穩定和穩定域理論的角度,解列的過程包括每個孤島子系統從一個穩定平衡點(擾動前穩定運行點)到另一個穩定平衡點(解列后孤島的穩定運行點)之間的動態過程。也就是說,一旦解列斷面確定,每個孤島對應的解列后穩定運行點和穩定域就確定了;而判斷某個孤島在解列后是否穩定,就是判斷在解列操作時,系統運行軌跡是否處于該孤島的穩定域內。單個孤島的可行解列時窗就是在故障清除后的動態過程中,系統軌跡處于該孤島穩定域內的時段;整個系統的可行解列時窗則是各孤島可行解列時窗的交集。
為了研究在解列動態過程中孤島的暫態穩定性及其對解列時刻的要求,需要將暫態穩定分析的對象和視角轉向每個孤島,分析每個孤島在解列過程中特別是解列前的運行軌跡,而不能再采用忽略孤島內暫態穩定的單機等值模型。
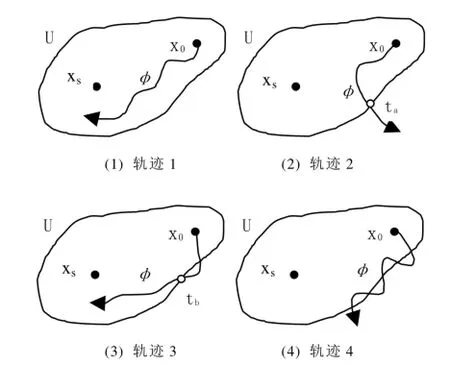
圖1 解列前孤島運行軌跡示意圖Fig.1 An illustration of island stability
考慮擾動過程中孤島運行軌跡和穩定域之間的關系,可行解列時窗的分布可能對應以下五種情況:
(1)擾動過程中解列前的孤島運行軌跡如圖1(1)所示,在故障發生、故障清除、系統失步/持續振蕩的過程中,孤島的運行軌跡始終在自己的穩定域內,此時無論何時解列,孤島均能穩定運行,平穩過渡到穩定運行點xs。
(2)解列前的孤島運行軌跡如圖1(2)所示,在系統失步/持續振蕩過程中,孤島內的同步性發生了變化,孤島運行軌跡在某個臨界時刻ta逸出穩定域。這種情況下,如果在該臨界時刻前解列,孤島可以過渡到穩定運行點,如果在臨界時刻后解列,孤島將失去穩定性。該臨界時刻ta由孤島未解列前運行軌跡和孤島穩定域的交點所確定。
(3)解列前的孤島運行軌跡如圖1(3)所示,在故障清除過程中,孤島的運行軌跡短時逸出穩定域。由于此時并未解列,孤島仍受系統其他部分的影響,持續一段時間后運行軌跡又進入到穩定域中,此時的可行解列時窗呈現出大于某個臨界時刻的特點,該臨界時刻tb由孤島運行軌跡進入穩定域的交點所確定。
(4)解列前的孤島運行軌跡如圖1(4)所示,在故障清除后的系統失步/振蕩階段,孤島內的發電機之間出現持續振蕩,孤島的運行軌跡在穩定域邊界持續振蕩,此時的可行解列時窗呈現出斷續的多時窗分布特點,經過幾個振蕩周期后,孤島可能失穩或趨于穩定。
(5)除了上述四種運行軌跡外,還有兩種情況,一種是由于解列策略的不合理導致孤島根本不存在穩定運行點xs,另一種是孤島的初始運行點處于其穩定運行點xs的穩定域外。這兩種情況下,孤島的可行解列時窗均為空,無論何時解列,孤島都不能穩定運行。
通過上述分析可以看到,類似于利用故障清除時刻的能量與臨界能量相比來評估系統擾動后的穩定性,孤島的穩定性可以用解列操作時刻的能量與孤島失穩的臨界能量相比較來進行評估。對孤島而言,故障發生、故障清除、系統失穩/振蕩都屬于擾動過程,而擾動的結束時刻即解列操作的執行時刻。
與判斷系統是否需要解列時將系統等值為雙機系統或單機無窮大系統的方法不同,評估解列后孤島是否穩定,應當將視角轉向每個孤島在解列過程中的暫態穩定性分析,即分析孤島內發電機之間的同步關系。首先,解列后形成的每個孤島必須有合理的穩定運行點,沒有穩定運行點的孤島除非進一步采取特殊的控制措施,否則不可能穩定運行;第二,在判斷出系統振蕩/失穩時,系統運行點必須位于孤島的穩定域內,且距離穩定邊界有一定的距離;第三,執行解列操作時,系統運行點必須位于孤島穩定域的穩定邊界內;第四,孤島的可行解列時窗就是解列過程中系統軌跡處于孤島穩定域的穩定邊界之內的時段。
3.2基于能量函數法的可行解列時窗計算
為了驗證以上分析,本文采用能量函數法[11]對解列的動態過程進行量化評估。為簡化分析,采用不帶控制的兩階發電機經典模型和恒阻抗負荷模型,并在計算過程中將系統收縮到發電機內節點進行時域仿真和能量函數的計算。
基于網絡化簡模型的能量函數法主要步驟包括:
(1)針對每一個解列策略,分別計算解列后每個孤島的穩定平衡點,并根據式(1)構建該孤島的能量函數(,)Vδω。
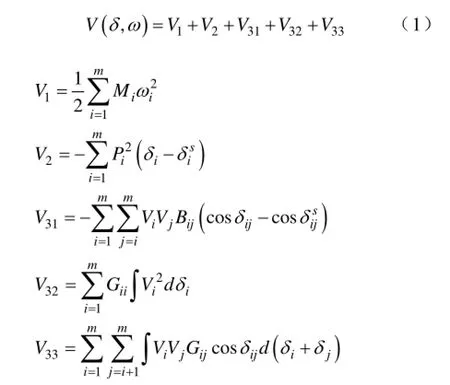
其中,iV和iδ為發電機i的內電勢幅值和功角,Bij和Gij為節點i和j之間的等效電納和電導,δij為點i和j之間的功角差。
(2)設定故障發生時刻、故障清除時刻,然后經過一定延時后對系統進行解列,并利用BCU法計算該孤島的主導UEP(Controlling Unstable Equilibrium Point, CUEP)。
(3)針對每個孤島,計算主導不穩定平衡點的能量作為該孤島的臨界能量。
(4)通過每個孤島的臨界能量和持續不解列場景下孤島的積分軌跡,來確定該孤島的可行解列時窗分布。
(5)取所有孤島的可行解列時窗分布的交集,作為整個系統的可行解列時窗。
本文所定義的可行解列時窗(Feasible Splitting Time Interval, FSTI),是暫態穩定意義下的可行解列時刻,即在該可行時窗內解列,形成的孤島一定是暫態穩定的;在該可行時窗外解列,所形成孤島的暫態穩定性不能保證。
3.3頻率穩定性對可行解列時窗的修正
為使得孤島實現穩定運行,除了孤島內的暫態穩定需要滿足以外,解列后孤島的頻率偏移也不能過大,否則將觸發發電機的頻率保護。在滿足孤島暫態穩定的可行解列時窗的基礎上,可以利用發電機頻率保護定值作為最大頻率偏移對解列時窗進一步修正。修正后的可行解列時窗FSTI′將同時滿足孤島暫態穩定和頻率偏移的要求。

其中,d是解列形成孤島的數目,t是某一時刻點,fj(t)是在t時刻孤島i中發電j的頻率偏移,
i fsetting為允許的最大頻率偏移。
在修正后的可行解列時窗FSTI′內,每個孤島內的發電機群均保持同調性并滿足頻率偏移要求,逐漸過渡到其各自的穩定運行點。
限于篇幅,本文主要研究暫態穩定意義下可行解列時窗的計算和分布特征,這是解列時刻選取的第一步,也是最難的一步。對考慮頻率穩定性的時窗修正僅做概念上的簡單介紹。
4 仿真分析
4.1可行解列時窗的計算
為了刻畫出可行解列時窗的分布特點,本文利用能量函數對解列過程進行量化分析,得到解列過程中各孤島能量變化的軌跡。
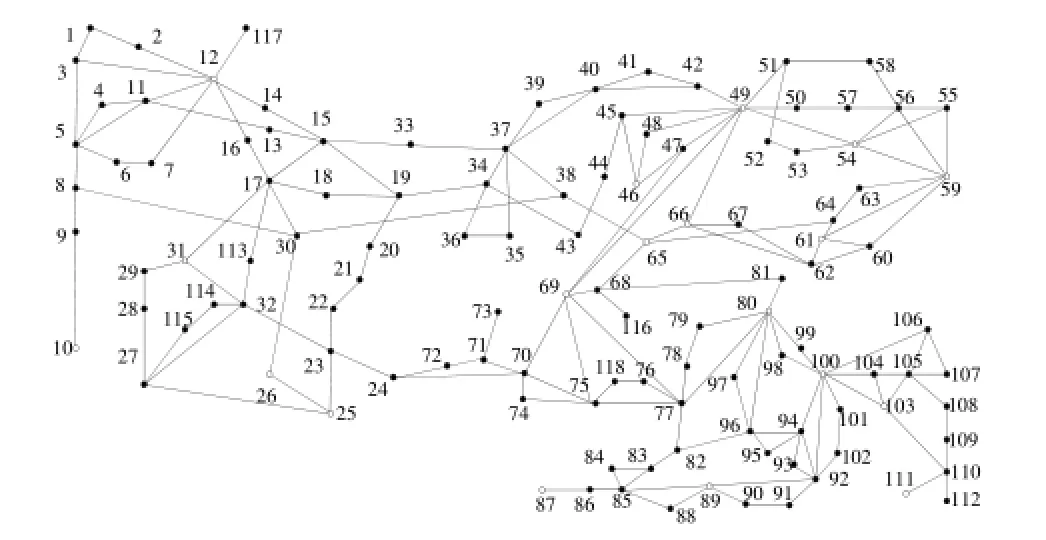
圖2 IEEE118節點系統Fig.2 IEEE 118-bus test system diagram
以圖2所示的IEEE118節點系統為例,選用了發生同一地點的同一故障(0.1s在線路23-25上靠近母線25處發生三相短路故障)作為擾動事件,通過設置故障清除時刻T1 (T1時刻跳開線路23-25清除故障)來形成擾動場景。為簡化分析,發電機采用經典模型,AVR和調速器均禁用,發電機參數如附錄I所示。
選取解列時刻T1=0.80s,發電機功角曲線如圖3所示。可以看到,IEEE 118節點系統中出現了兩機群:臨界機群Group1{10,12,25,26,31}和剩余機群Group2:{46,49,54,59,61,65,66,69,80,87,89,100,103,111}失步,機群1內部隨時間持續不能保持同步,發電機G31將失穩。
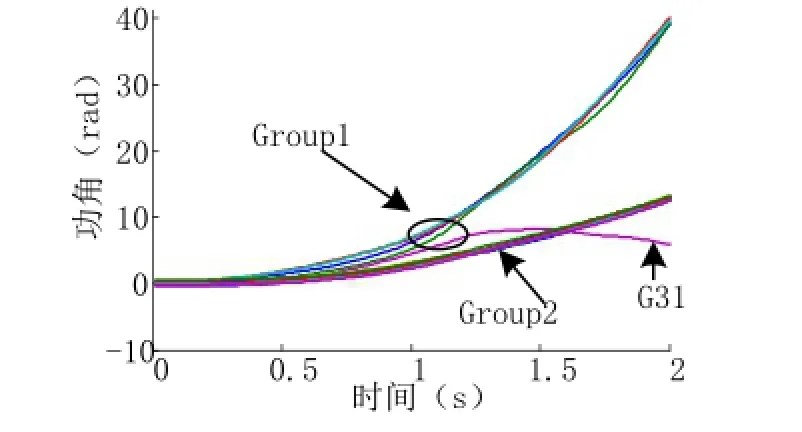
圖3 故障清除時刻為0.8s的發電機功角曲線Fig.3 Rotor angles with the fault clearing time 0.8s
選取解列策略{15-33, 19-34, 30-38, 23-24},可以將系統分割為兩個部分:孤島1和孤島2,分別包含機群Group1和Group2。
選取圖4(1)所示的孤島1作為研究對象,利用BCU法可以得到故障后SEP為{0.1397,-0.3485, 0.1083,0.1478,-0.524},主導UEP為{-0.2812, -0.7959,-0.3086,-0.2469,2.743}。故障發生、故障清除及系統振蕩/失步過程中孤島1的暫態能量變化如圖4(2)所示,其中的藍色實線為孤島1在清除故障但未解列時的暫態能量,紅色點劃線對應著主導UEP的臨界能量2.974 pu。根據主導UEP的臨界能量可以計算出臨界的解列時刻為0.94s,這種情況對應于圖1(2)的運行軌跡。
應當特別指出的是,這里雖然選用解列策略{15-33, 19-34, 30-38, 23-24}作為孤島1的邊界,但并未執行解列策略,所以孤島1內的能量并不守恒。

圖4 0.80s清除故障時孤島1的暫態能量變化Fig.4 Transient energy of island 1 with the fault clearing time 0.80s
在0.94s和0.97s分別進行解列時,孤島的能量變化如圖5(1)-(2)所示,其中,0.94s解列時孤島1可以穩定,而0.97s解列時孤島1失去穩定,解列后孤島的能量均保持恒定。由于暫態能量函數法具有一定的保守性,通過能量函數求得的臨界解列時刻0.94s略小于實際的臨界解列時刻0.96s。
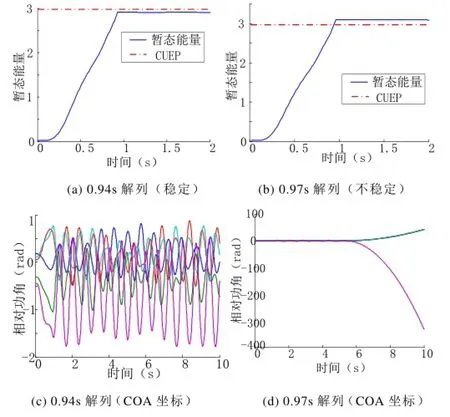
圖5 0.94s和0.97s解列時孤島1的暫態能量和功角Fig.5 Transient energy of island 1 with the fault clearing time 0.80s
通過大量時域仿真可以觀察到,不管故障清除時間如何變化,解列后孤島1的失步模式始終為發電機31失步這一種失步模式,即對應著同一個主導UEP。這一特點使得本例的分析簡單很多,這也是圖4中主導UEP的臨界能量能夠表示為一條直線的原因。
4.2可行解列時窗的分布特征
在本文中,由于固定了發生故障的位置和故障類型,故障持續時間成為影響可行解列時窗的一個非常重要的因素。除了4.1中故障清除時刻為0.8s的算例以外,為進一步研究可行解列時窗的分布特征,分別選取故障清除時刻T1=0.61s, 0.72s, 0.73s和0.94s的解列場景進行研究。
圖6(1)為T1=0.61s時,孤島1在擾動過程中的暫態能量變化。可以看到,此時在任何一個時刻執行解列操作,孤島1的暫態能量均小于主導UEP所對應的臨界能量,孤島1始終會穩定,這種情況對應于圖1(1)的運行軌跡。
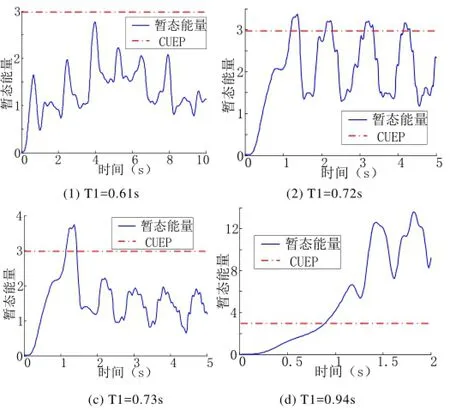
圖6 不同故障清除時間時孤島1的暫態能量變化Fig.6 Transient energy of island 1 with different fault clearing times
當T1=0.72s時,由于機群Group1在0.72s故障清除后始終未完全失去同步,處于振蕩過程中,孤島1的暫態能量出現了持續振蕩,從而使得可行解列時窗呈現多時窗分布的特點(如圖6(2)所示,對應圖1(4)的運行軌跡)。
當T1=0.73s時,這種振蕩是快速衰減的,孤島1的暫態能量在短時超出臨界能量后,快速回到穩定域內,此時的可行解列時窗將大于某個臨界值(如圖6(3)所示,對應圖1(3)的運行軌跡)。
由于暫態能量上升沿與主導UEP能量的交點可以比較準確的表征孤島從穩定變為不穩定的臨界解列時刻,但下降沿的交點不能準確表示從不穩定變為穩定的臨界時刻[11],所以圖6(2)僅能作為持續振蕩過程中暫態能量變化的示意圖,準確的可行解列時窗應通過時域仿真得到,如表I所示。
當故障清除時間達到0.94s時,無論何時解列,形成的孤島均不能穩定運行,此時可行解列時窗為空。
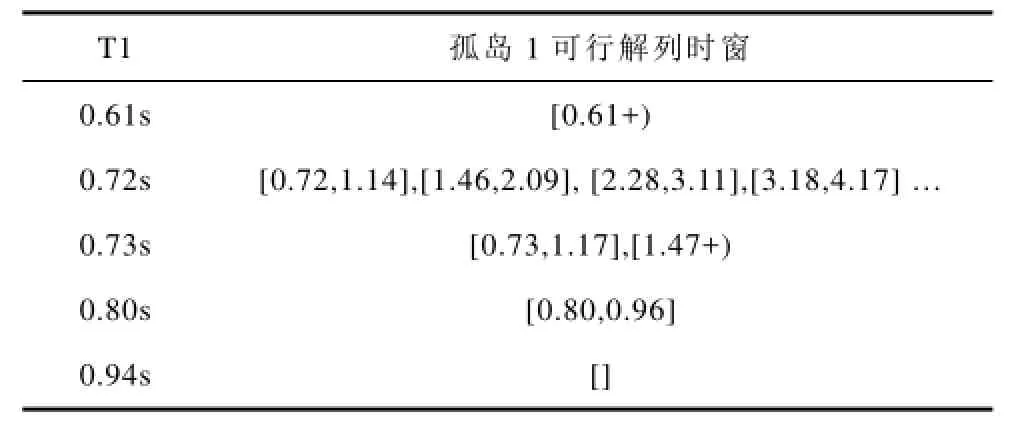
表 孤島1的可行解列時窗(時域仿真)Tab. Feasible splitting time interval of island 1
另外,不同故障清除時刻所對應孤島2的穩定性均較好,無論何時解列,解列后的孤島2均可穩定(對應于圖1(1)的運行軌跡),所以本文主要分析孤島1的穩定性和可行解列時窗。從這里也可以看到,包含臨界機群的孤島往往較小,穩定性較差,對解列時刻和解列斷面的要求較高;而包含剩余機群的孤島相對比較穩定。但如果在包含剩余機群的孤島內發生后繼擾動,則很有可能破壞孤島的穩定性,使得該孤島失穩或進一步解列。
綜合來看,由于故障清除時刻引起的擾動背景不同,孤島的可行解列時窗呈現出了五種不同的情況:1)任何時刻均可以解列,這種情況對應于擾動較小或孤島較強壯的情況,在解列動態過程中孤島內部的發電機始終保持較好的同步關系;2)小于某個臨界時刻,此擾動背景下出現失步或持續振蕩,在臨界時刻之前解列,孤島內的同調機群仍能夠保持同步,最終過渡到穩定的孤島運行,但大于臨界時刻后解列,孤島內的同調機群將失穩。3)大于某個臨界時刻,如圖6(3)中0.73s清除故障的情況,此時解列并不是越早越好,而是在某個臨界時刻后解列才可以保證孤島內機群的同步性。4)斷續的時窗特征:當某個機群內部出現持續振蕩時,整個解列時刻可能呈現出斷續的時窗特征,如圖6(2)中0.72s清除故障的情況。若該振蕩快速衰減,則可能成為上述第三種情況。5)可行解列時窗為空:對應于圖6(4)所示的情況,由于故障清除過晚致使可行解列時窗為空。
5 結語
本文采用暫態能量函數法對解列動態過程進行了量化分析,刻畫了不同擾動背景下系統可行解列時窗的分布特征,對主動解列的可行解列時窗進行了系統性分析。在研究方法上,首次將暫態穩定分析的對象和視角轉向每個孤島(解列后子系統),分析每個孤島在解列過程中內部的暫態穩定和對解列時刻的要求,而不再僅采用忽略孤島內暫態穩定的單機等效模型。
研究表明,解列時刻并不是越快越好。在本文中,由于故障清除時刻引起的擾動背景不同,孤島的可行解列時窗呈現出了五種不同的情況:1)任何時刻均可解列;2)小于某個臨界時刻;3)大于某個臨界時刻;4)斷續的時窗特征;5)可行解列時窗為空。在可行解列時窗范圍內執行解列操作,形成的孤島可以穩定運行;在可行解列時窗范圍外執行解列操作,形成的孤島無法穩定運行。
結合能量函數和時域仿真,本文首次嘗試從機理上解釋和刻畫解列時刻的特征,為進一步研究主動解列問題提供了新的思路和支撐。當然,本文中也存在一些不足,例如僅考慮了發電機經典模型和恒阻抗模型,未考慮AVR和調速器的控制作用,得到的可行解列時窗非常保守,尺度很小。未來工作將考慮引入發電機高階模型和控制措施,采用更符合實際的算例,并進一步研究解列時刻的在線決策方法。
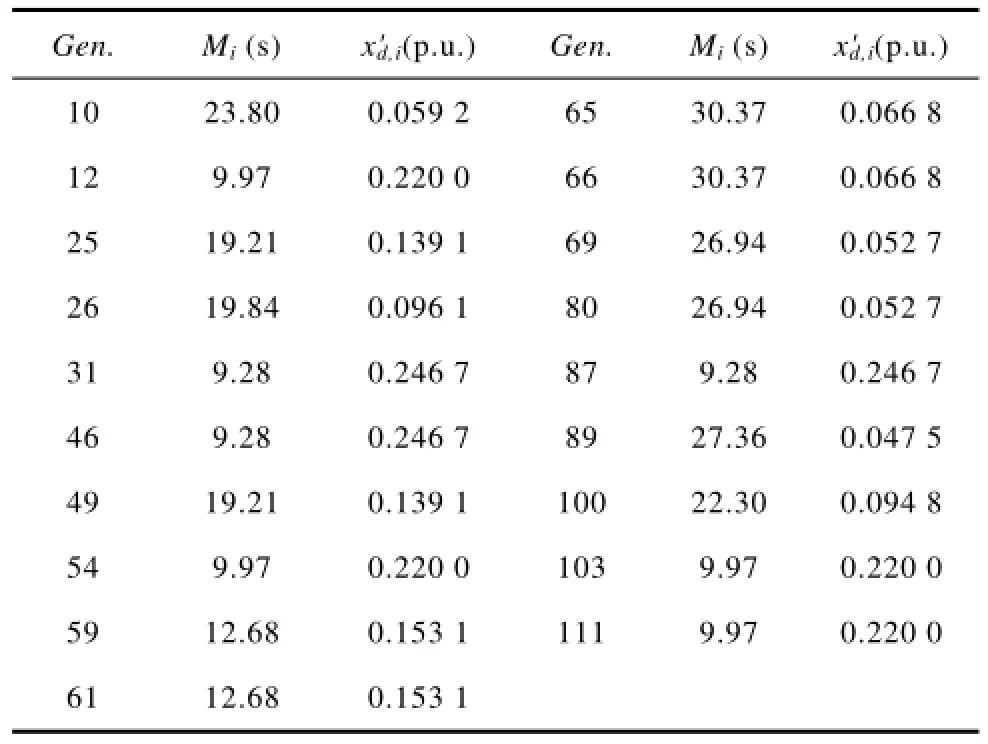
附錄1 118節點系統的發電機數據Generator data for the IEEE 118-bus test system on a base of 100 MVA
[1] Senroy, N., Heydt, G.T. Timing of a controlled islanding strategy[C]. Transmission and Distribution Conference and Exhibition, 2005/2006 IEEE PES, 21-24 May, 2006, Dallas, USA:1460-1466.
[2] K. Sun, K. Hur, P. Zhang, A new unified scheme for controlled power system separation using synchronized phasor measurements [J]. IEEE Trans. Power Systems, 2011, 26(3):1544-1554
[3] M. Jin, T. S. Sidhu, K. Sun, A new system splitting scheme based on the unified stability control framework[J]. IEEE Trans. Power Systems, 2007, 22: 433-441.
[4] Q. Zhao, K. Sun, D. Zheng, J. Ma, Q. Lu, A study of system splitting strategies for island operation of power system: a two-phase method based on OBDDs [J]. IEEE Trans. on Power Syst., 2003, 18(4): 1556-1565.
[5] Y. Qiao, Study on the active splitting control scheme of large-scale power systems, Ph.D Thesis, Tsinghua Univ., Beijing, 2007.
[6] L. Ding, F. Gonzalez-Longatt, P. Wall, V. Terzija, Two-step spectral clustering controlled islanding algorithm, IEEE Trans. on Power Syst., 2013, 28(1): 75-84.
[7] C. Wang, B. Zhang, Z. Hao, J. Shu, P. Li, Z. Bo. A novel real-time searching method for power system splitting boundary. IEEE Trans. on Power Syst., 2010, 25(4): 1902-1909.
[8] P.A. Trodden, W.A. Bukhsh, A. Grothey, K.I.M. McKinnon, MILP formulation for controlled islanding of power networks, International Journal of Electrical Power & Energy Systems, 2013, 45(1): 501-508.
[9] 宋洪磊, 吳俊勇, 吳林峰, 電力系統緊急情況下的動態分區和自主解列策略, 電工技術學報, 2012.
[10] 盧芳,于繼來,基于網絡能量的電力系統失步解列方案[J]. 哈爾濱工程大學學報, 2011,32(6):780-785.
LU Fang, Yu Jilai, A method of power system outof-step separation based on network energy[J]. Journal of Harbin Engineering University, 2011, 32(6): 780-785.
[11] H. Chiang, Directed methods for stability analysis of electrical power systems [M]. Wiley Press, 2011.
Research on feasible splitting time interval of controlled islanding
Ding Lei1 Guo Yichen1 Chen Qing1 Vladimir Terzija1,2
(1. Key Laboratory of Power System Intelligent Dispatch and Control of the Ministry of Education (Shandong University) Jinan 250061 China; 2. The University of Manchester Manchester, UK, M13 9PL)
Controlled islanding is an active and effective way of avoiding catastrophic wide area blackout. The splitting time is the determining factor of successful islanding. However, it has not been well studied before since existing islanding methods are based on the system snapshots before disturbance occurrence and do not consider dynamic islanding process. This paper investigates the splitting time of controlled islanding systematically for the first time. Transient energy function is used to evaluate the stability of islands formed during the islanding process quantitatively. And the feasible splitting time interval is determined by the critical energy of islands to ensure the coherency and transient stability within created islands. Only when the splitting is undertaken within the feasible splitting time interval, the coherency within each island can be maintained and a successful islanding is possible.
Controlled islanding, Feasible splitting time interval, Stability region, Transient energy function
TM712
丁 磊 男,1980年生,博士,副教授,主要研究方向:電力系統廣域保護控制和微電網保護控制。
國家自然科學基金資助項目(51477093,51107071)。
2014-07-10
郭一忱 男,1990年生,碩士研究生,主要研究方向:電力系統主動解列。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
