鄭州市下穿中州大道超大斷面矩形隧道頂管姿態(tài)控制技術
2015-04-16 12:00:12楊紅軍
隧道建設(中英文) 2015年10期
關鍵詞:施工
榮 亮,楊紅軍
(中鐵隧道股份有限公司,河南 鄭州 450000)
0 引言
伴隨著經(jīng)濟的發(fā)展和地下空間的開發(fā),越來越多的矩形頂管隧道應用于地下工程的建設。隨著矩形頂管橫斷面尺寸的增大,施工過程中存在開挖面各點壓力差別、頂管側(cè)向受力不均等問題,造成超大斷面矩形隧道施工中的頂管姿態(tài)難以控制。文獻[1-4]主要介紹了頂管隧道施工關鍵技術,對頂管姿態(tài)進行了分析和闡述;文獻[5-7]介紹了頂管隧道糾偏原理,闡述了部分頂管姿態(tài)糾偏的關鍵技術措施;文獻[8]介紹了泥墊式防側(cè)轉(zhuǎn)控制技術在實際工程中的應用;文獻[9-11]主要介紹了頂管姿態(tài)的測量方法,并在此基礎上進行了頂管姿態(tài)控制;文獻[12]主要介紹了一種應用圖像識別技術測量頂管機姿態(tài)的方法;文獻[13]介紹了大型機械頂管姿態(tài)控制技術在施工中的應用;文獻[14]介紹了在復雜地質(zhì)環(huán)境中穿越黃河長距離頂管質(zhì)量控制技術;文獻[15]主要介紹了矩形頂管防側(cè)轉(zhuǎn)的控制措施。以上研究針對頂管姿態(tài)控制措施的一個或幾個方面進行了介紹,而對于超大斷面矩形頂管姿態(tài)整套控制技術,可供參考的文獻不多。本文以鄭州市下穿中州大道工程為背景,對超大斷面矩形頂管姿態(tài)控制難點進行了分析,并對頂管姿態(tài)控制和糾偏措施進行了詳細介紹。
1 工程概況
紅專路下穿隧道起始點位于紅專路與姚寨路交叉口處,沿紅專路向東下穿中州大道,終點位于紅專路與龍湖外環(huán)路交叉口處,工程全長801.263 m。其中,下穿中州大道段采用矩形土壓平衡頂管法施工,長度為105 m。頂管段隧道為4條隧道平行布置,中間2孔為機動車道,斷面為10.10 m×7.25 m(寬×高),兩側(cè)2孔為非機動車道,斷面為7.50 m×5.40 m(寬×高)。頂管隧道平面、橫斷面布置見圖1和圖2。
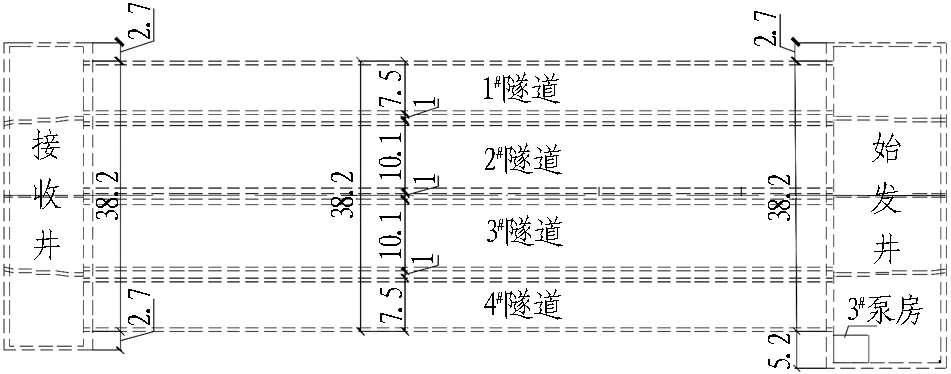
圖1 頂管段隧道平面布置圖(單位:m)Fig.1 Plan layout of four tunnel tubes constructed by pipe jacking method(m)
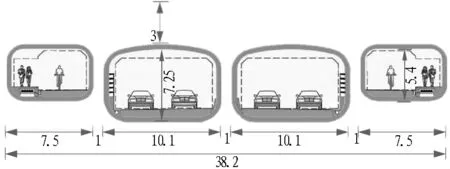
圖2 頂管段隧道橫斷面布置圖(單位:m)Fig.2 Cross-section of four tunnel tubes constructed by pipe jacking method(m)
根據(jù)地質(zhì)勘查報告,本工程所處地貌單元為黃河沖積平原,地形起伏較小。勘探深度范圍內(nèi)地基土屬第四系沉積地層,分布較為規(guī)律,其縱橫向展布較均勻,起伏變化不大,主要為人工填土、第四系全新統(tǒng)粉土、粉質(zhì)黏土、粉砂及細砂等,工程地質(zhì)橫斷面見圖3。
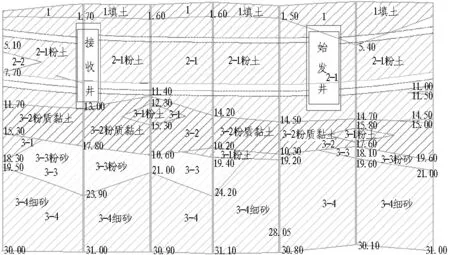
圖3 頂管隧道地質(zhì)橫斷面圖(單位:m)Fig.3 Geological profile of four tunnel tubes constructed by pipe jacking method(m)
場地勘察期間,地下水位埋深在地表下7.7~9.0 m處,根據(jù)區(qū)域資料,場地地下水位年變幅為1~2 m。
2 頂管機簡介
4條頂管隧道采用2臺頂管機進行施工,其中機動車道頂管機斷面為10.12 m ×7.27 m(寬 × 高),見圖4,非機動車道頂管機斷面為7.52 m×5.42 m(寬×高),見圖5。2臺土壓平衡頂管機采用6個刀盤切削土體,雙螺旋機出土,盾體中部周向布置主動糾偏油缸,其布置見圖6和圖7,糾偏油缸參數(shù)見表1。
3 頂管姿態(tài)控制難點分析
1)頂管隧道斷面為矩形,由于地層的不均勻性和注漿壓力的偏差,極易造成頂管隧道左右側(cè)壓力不等,致使頂管隧道軸線偏差。
2)頂管隧道斷面極大,施工過程中易出現(xiàn)土艙各點壓力不均且不連續(xù),導致土艙左、右側(cè)或上、下側(cè)壓力不平衡,造成頂管隧道軸線偏差。

圖4 大頂管機工廠組裝照片F(xiàn)ig.4 Large pipe-jacking machine at workshop

圖5 小頂管機工廠組裝照片F(xiàn)ig.5 Small pipe-jacking machine at workshop
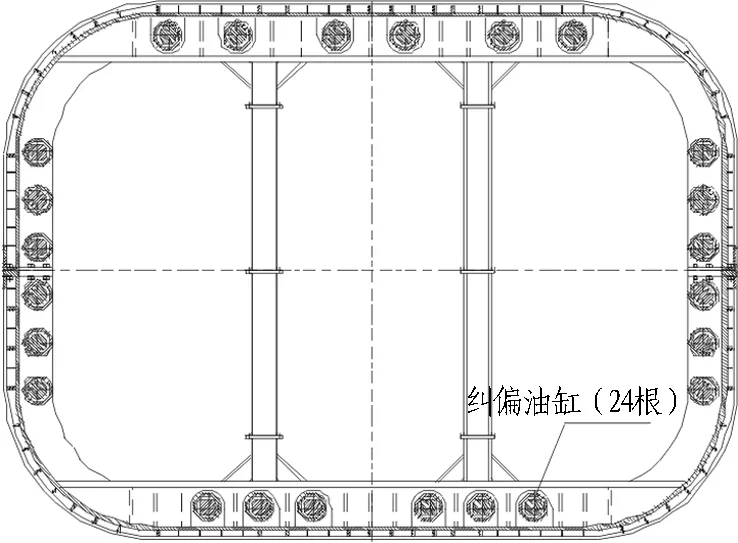
圖6 大頂管糾偏油缸布置圖Fig.6 Layout of deviation-rectifying cylinders of large pipe-jacking machine
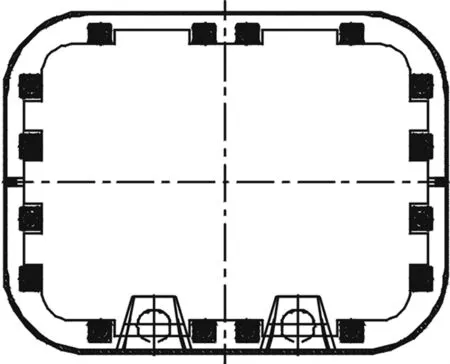
圖7 小頂管糾偏油缸布置圖Fig.7 Layout of deviation-rectifying cylinders of small pipe-jacking machine
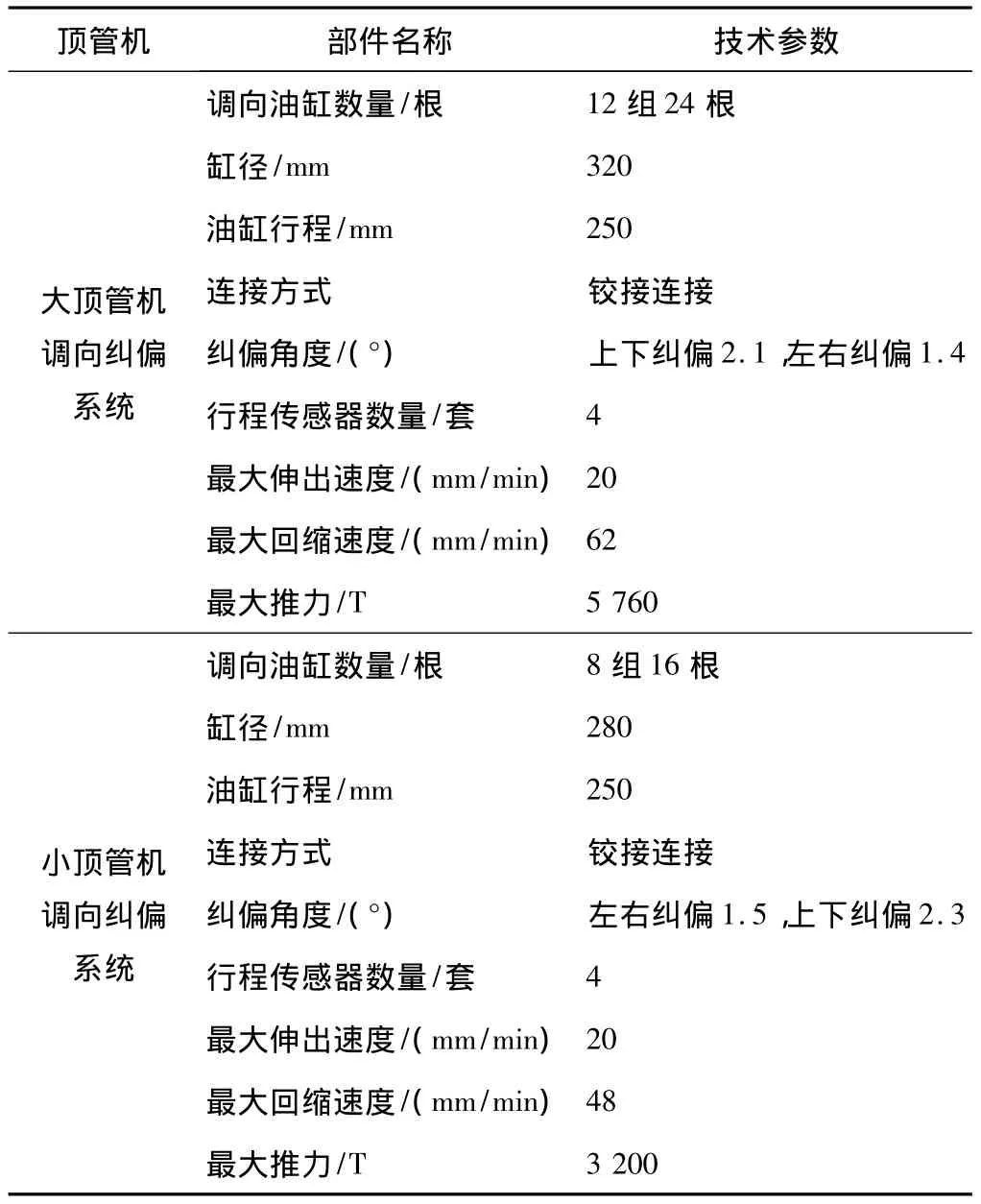
表1 大、小頂管糾偏油缸技術參數(shù)表Table 1 Technical parameters of deviation-rectifying cylinders of large and small pipe-jacking machines
3)由于頂管機長度較短且質(zhì)量較大,隧道覆土淺,同時,施工過程中注入大量的觸變泥漿;所以,頂管掘進施工過程中,極易出現(xiàn)頂管機"載頭"和管節(jié)上浮現(xiàn)象。
4)4條隧道平行布置,且凈間距僅為1.0 m,頂進過程中受多次擾動,造成中間土體壓力大量釋放,在后期隧道推進施工過程中,極易出現(xiàn)正掘進隧道和已完成隧道向中間移動。
5)頂管隧道一次性頂進距離為105 m,隨著頂進距離的增加,頂管隧道柔性增加,在掘進過程中極易出現(xiàn)擺動。
4 姿態(tài)控制技術措施
4.1 姿態(tài)測量
頂管姿態(tài)測量采用自動導向系統(tǒng)和人工輔助測量相結(jié)合的方式,以確保對頂管姿態(tài)的精確控制。施工過程中,根據(jù)線路條件所做的分段軸線擬合控制計劃、導向系統(tǒng)反映的姿態(tài)信息來控制頂管機的推進姿態(tài)。
4.1.1 自動導向系統(tǒng)
自動導向采用激光導向系統(tǒng),控制頂管推進5個方向自由度,保證頂管頂進方向的正確。激光導向系統(tǒng)能夠?qū)敼茉谕七M過程中的姿態(tài)以及頂管的線路和位置關系進行精確測量和顯示,能夠全天候在頂管機主控室動態(tài)顯示頂管當前位置與隧道設計軸線的偏差,并據(jù)此控制、調(diào)整頂管推進方向,使其始終保持在允許的偏差范圍內(nèi)。
4.1.2 人工測量
頂管推進導向系統(tǒng)后視基準點需要前移,必須通過人工測量來進行精確定位。為保證推進方向的準確可靠,每10 m進行1次人工測量,以校核自動導向系統(tǒng)的測量數(shù)據(jù),并復核頂管的位置和姿態(tài)。
4.2 鉸接油缸糾偏
在超大斷面矩形頂管施工過程中,鉸接糾偏是最直接、最有效的姿態(tài)控制方法之一。鉸接油缸位置的放置需考慮調(diào)向的靈敏性和盾體穩(wěn)定的導向作用2方面要求。超大矩形頂管前盾的長度較短,使鉸接力能夠有效地傳遞到刀盤,便于轉(zhuǎn)向;尾盾設計較長,并通過拉桿與后3~4環(huán)管節(jié)相連接,避免出現(xiàn)過度糾偏。
正常掘進時,鉸接油缸全部收回,以防頂管姿態(tài)發(fā)生偏差。當頂管姿態(tài)發(fā)生偏差時,將發(fā)生偏差側(cè)的鉸接油缸進行伸長,以調(diào)整頂管姿態(tài)。同時,將相應側(cè)的用于與頂管機和管片連接的拉桿松動,以利于頂管姿態(tài)的調(diào)整。鉸接伸長的距離根據(jù)地層情況、姿態(tài)偏差的大小、擬合掘進線路等綜合確定。
4.3 注漿糾偏
當頂管機發(fā)生中線偏差或滾轉(zhuǎn)、鉸接糾偏能力不足時,可借助于盾體及管節(jié)上預留的觸變泥漿孔及糾偏泥漿注入系統(tǒng),在需要的位置向地層注入糾偏泥漿,見圖8,調(diào)整頂管周圍的地層壓力,依靠地層壓力的偏差和地層的微量壓縮性進行糾偏。
4.4 雙螺旋機出土糾偏
為保證土艙各點壓力的連續(xù)性和均勻性,頂管機設計為雙螺旋機出土,見圖9。
在正常掘進過程中,要保持雙螺旋機出土的一致,防止土艙左、右側(cè)或上、下側(cè)壓力出現(xiàn)不平衡,造成頂管隧道軸線偏差。當頂管出現(xiàn)姿態(tài)偏差時,可以通過調(diào)整雙螺旋機的轉(zhuǎn)速,控制雙螺旋機出土量和土艙左、右側(cè)或上、下側(cè)壓力差,進行姿態(tài)調(diào)整。

圖8 糾偏注漿泵Fig.8 Grouting pumps

圖9 雙螺旋機現(xiàn)場出渣照片F(xiàn)ig.9 Muck releasing by twin screw conveyors
4.5 六刀盤的控制
頂管共設有6個刀盤,每個刀盤的轉(zhuǎn)動方向均可獨立控制。正常掘進時,為了保證頂管機的穩(wěn)定以及減小頂管掘進過程中對地層的擾動,六刀盤控制的原則為"上下對稱,左右對稱"。在頂管掘進過程中,正常情況下采用如圖10所示的4種掘進模式。當頂管機發(fā)生滾轉(zhuǎn)時,可通過6個或其中多個刀盤同向轉(zhuǎn)動使頂管獲得某個方向的反扭矩,達到輔助滾轉(zhuǎn)糾偏的目的。
4.6 頂推油缸控制
頂管機推進油缸設計為等推力油缸,每個油缸可單獨控制,防止頂推油缸對頂進姿態(tài)產(chǎn)生不利影響。在每環(huán)掘進過程中,必須檢查油缸長度2次以上,以保證油缸伸長長度一致。當某根或某組油缸伸長長度較大時,必須進行單獨控制,調(diào)整伸長量。
頂推油缸對頂管隧道姿態(tài)糾偏距離有限,一般可進行糾偏掘進的長度在30 m范圍內(nèi),在頂管始發(fā)階段可通過調(diào)整油缸長度進行姿態(tài)糾偏。頂管始發(fā)階段必須控制好頂管姿態(tài),為后期頂管推進打下良好基礎。
4.7 長距離推進姿態(tài)控制
管節(jié)環(huán)向之間設計為承插口進行連接。隨著頂管推進的距離增加,整條隧道的柔性加大,在掘進過程中頂管隧道極易出現(xiàn)擺動,造成頂管姿態(tài)很難控制。為增加頂管環(huán)向間的連接剛性,在管節(jié)環(huán)向間設置自鎖型連接銷(見圖11),目的是在頂管隧道施工過程中起到抗剪、定位、止退等作用。
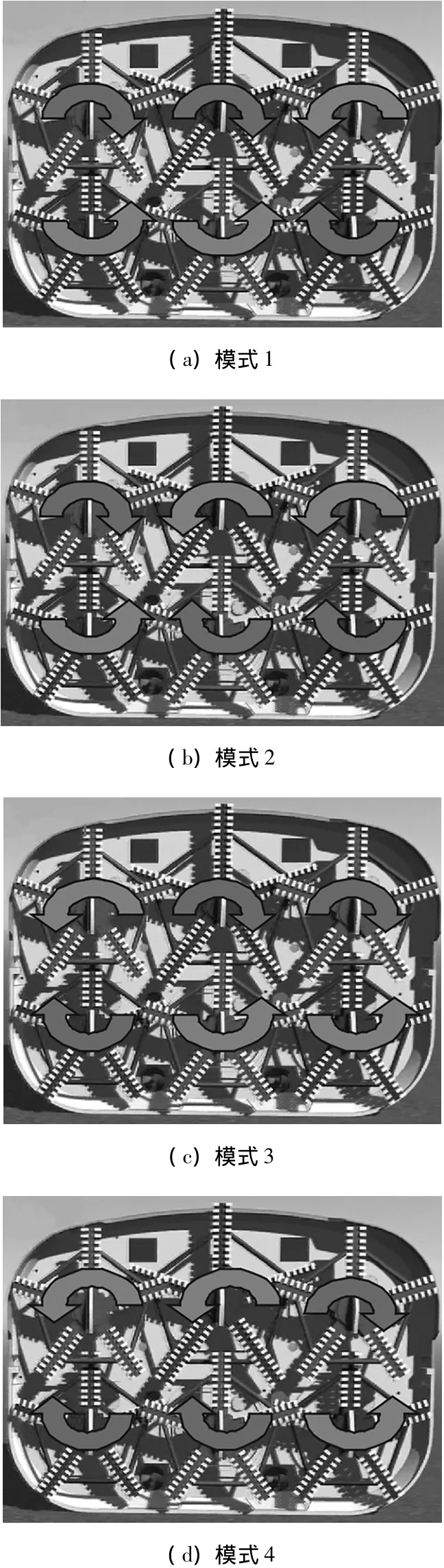
圖10 六刀盤控制的4種模式Fig.10 4 control modes of cutterheads
4.8 小間距掘進姿態(tài)控制
4條隧道平行布置且凈間距僅為1.0 m,由于掘進的多次擾動造成地層壓力釋放,掘進過程極易出現(xiàn)正掘進隧道和已完成隧道向中間移動,造成頂管隧道的姿態(tài)偏差。為此,在管節(jié)預制過程中,預埋壓力傳感器(見圖12),時刻監(jiān)測頂管隧道左右側(cè)的地層壓力,當出現(xiàn)壓力偏差較大時,及時通過管節(jié)上預留的注漿孔注入觸變泥漿進行調(diào)整,直至左右側(cè)壓力平衡為止。
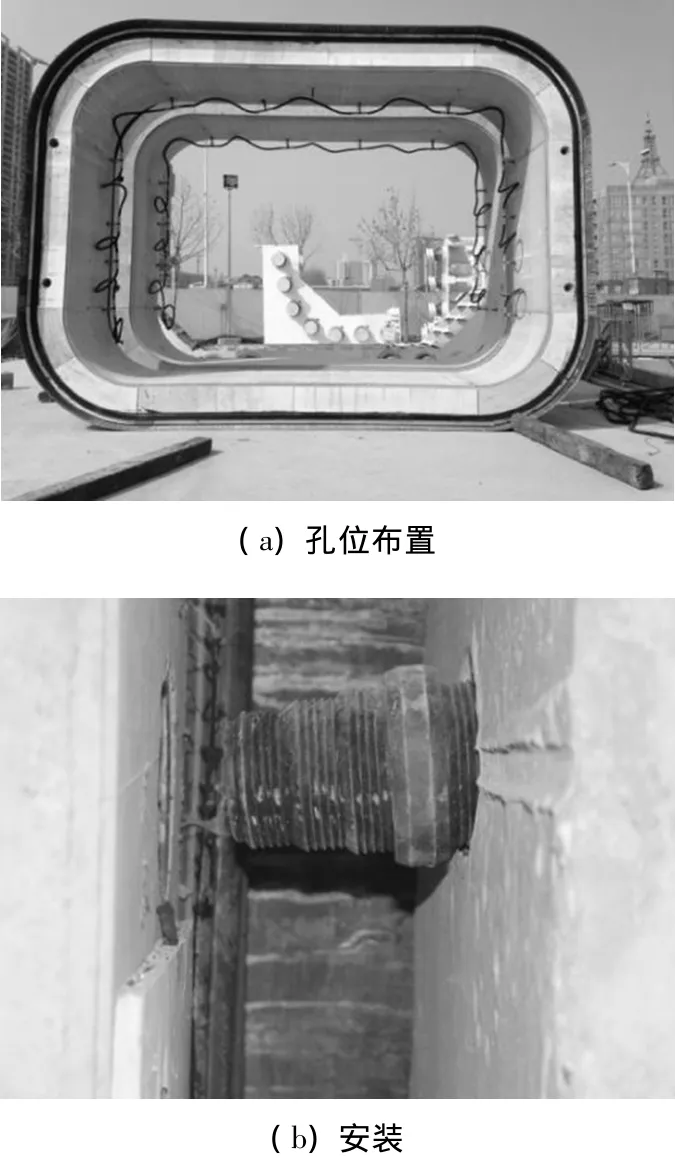
圖11 自鎖型連接銷孔位布置及安裝圖Fig.11 Layout and installation of automatic-locking connection pins
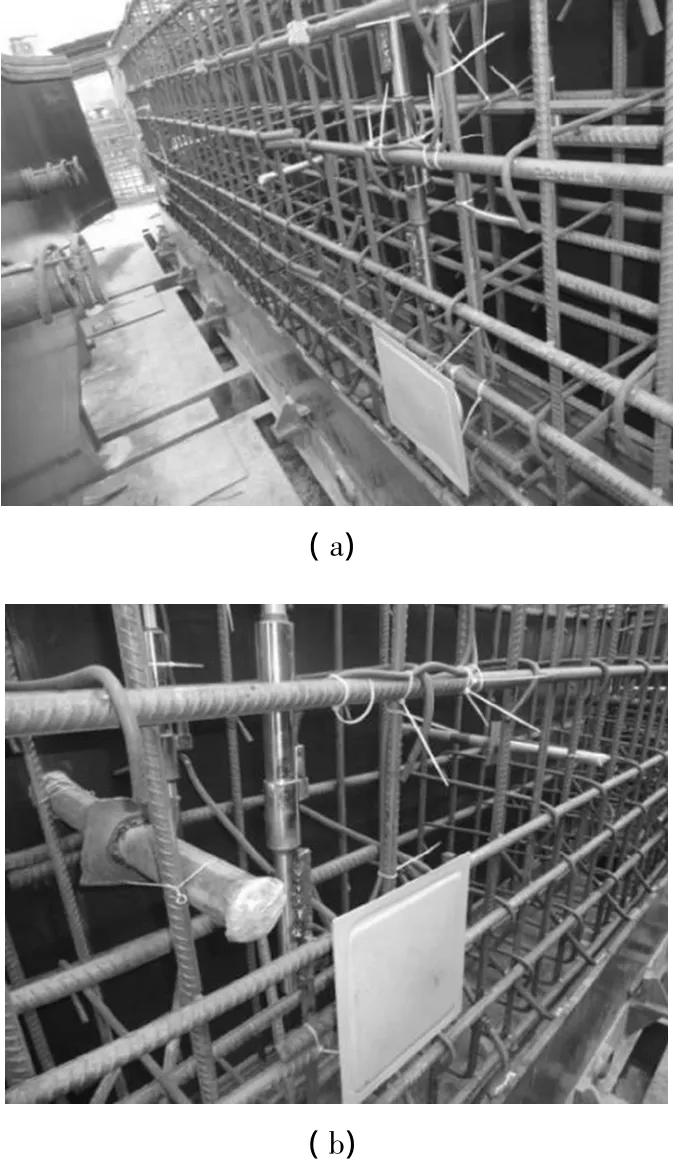
圖12 壓力傳感器預埋施工圖Fig.12 Embedded pressure sensors
5 控制效果
4條頂管隧道于2014年8月30日全部貫通,經(jīng)4條頂管隧道施工的多次擾動,頂管水平、高程、偏轉(zhuǎn)均控制在規(guī)范和設計要求范圍內(nèi)。其中,管節(jié)偏轉(zhuǎn)控制在±1°,水平、高程姿態(tài)曲線見圖13。
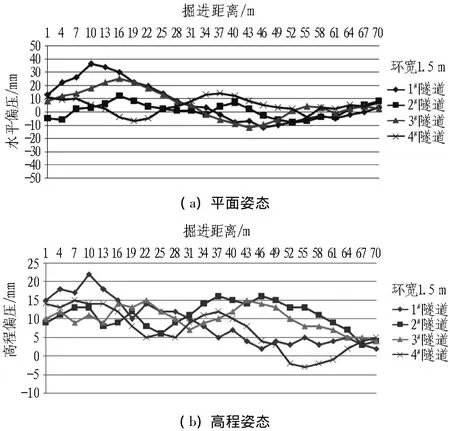
圖13 4條頂管隧道姿態(tài)曲線圖Fig.13 Attitude control results of four tunnel tubes constructed by pipe-jacking method
6 結(jié)論與討論
針對超大矩形斷面、淺覆土、小間距、長距離頂管施工過程中的姿態(tài)控制問題,通過理論分析和施工過程控制,得出以下主要結(jié)論。
1)通過姿態(tài)量測、雙螺旋機出土、六刀盤操控、小間距掘進控制、長距離掘進控制等控制措施,可有效控制頂管姿態(tài)。
2)通過鉸接糾偏、注漿糾偏、雙螺旋機出土糾偏、六刀盤控制、頂進油缸控制等糾偏措施,可有效進行頂管姿態(tài)糾偏。
3)超大斷面矩形頂管姿態(tài)控制、糾偏難度較大,糾偏時要做到勤糾、慢糾。
4)在頂管施工中,必須根據(jù)工程實際、地層參數(shù)和現(xiàn)場條件,參考國內(nèi)外類似工程選擇糾偏參數(shù)。
5)鉸接糾偏和注漿糾偏是頂管姿態(tài)糾偏的主要措施,糾偏效果明顯。而如何根據(jù)姿態(tài)的大小來控制鉸接油缸伸長偏差以及注漿調(diào)整地層壓力差,有待進一步研究,以防糾偏過小或過大。
[1] 周忠陸.泥水平衡式頂管施工關鍵技術的分析與應用[J].城市建筑,2014(17):111-112.(ZHOU Zhonglu.Analysis and application of key construction technologies of sludgewater balanced pipe-jacking[J].Urbanism and Architecture,2014(17):111 -112.(in Chinese))
[2] 周明.矩形盾構(gòu)頂管施工技術在城市隧道中的應用[J].科技創(chuàng)新與應用,2014(15):190 -191.(ZHOU Ming.Application of rectangular pipe-jacking machine in construction of urban tunnels[J].Scientific Innovation and Application,2014(15):190-191.(in Chinese))
[3] 上官柏,田琨.復雜地質(zhì)長距離、大管徑、土壓平衡機械頂管施工控制技術探討[J].城市建設理論研究:電子版,2014(23):1605 - 1606.(SHANGGUAN Bai,TIAN Kun.Discussion on construction control technology in long-distance tunneling by large-diameter EPB pipe-jacking machine in complex geological conditions[J].Theoretical Research on Urban Construction:Electronic Version,2014(23):1605-1606.(in Chinese))
[4] 曹海軍.大斷面矩形頂管施工技術例析[J].建筑,2014(7):65 - 66.(CAO Haijun.Case study on tunneling by large-cross-section rectangular pipe-jacking machine [J].Architecture,2014(7):65-66.(in Chinese))
[5] 趙振華.淺埋大直徑頂管施工糾偏研究[J].城市建設理論研究:電子版,2013(16):3969.(ZHAO Zhenhua.Study on deviation rectification in tunneling by large-diameter pipejacking machine under shallow cover[J].Theoretical Research on Urban Construction:Electronic Version,2013(16):3969.(in Chinese))
[6] 羅云峰,白占偉.軟土地區(qū)大直徑長距離曲線頂管姿態(tài)控制的關鍵技術研究[J].建筑施工,2014,36(1):77 -79.(LUO Yunfeng,BAI Zhanwei.Study on key technology for posture control over super long distance curved big-diameter pipe-jacking in soft soil area[J].Building Construction,2014,36(1):77 -79.(in Chinese))
[7] 王福文.大截面矩形頂管施工糾偏控制技術[J].建筑工程技術與設計,2015(4):85.(WANG Fuwen.Deviation rectification and control technology in tunneling by large-crosssection rectangular pipe-jacking machine[J].Architectural Engineering Technology and Design,2015(4):85.(in Chinese))
[8] 歐炳瑜.淺談矩形頂管施工的軸線控制[J].建筑工程技術與設計,2014(14):716 -717.(OU Bingyu.Discussion on axis control in tunneling by rectangular pipe jacking[J].Architectural Engineering Technology and Design,2014(14):716-717.(in Chinese))
[9] 張朝彪,周杜鑫,王愷華,等.特大直徑鋼頂管工程中的頂管機改進及測量控制技術[J].建筑施工,2009,31(3):217 -218.(ZHANG Chaobiao,ZHOU Duxin,WANG Kaihua.Improvement of jacking machine for ultra big-diameter steel pipe and surveying control technique[J].Building Construction,2009,31(3):217 -218.(in Chinese))
[10] 胡朝暉.降低長距離頂管軸線偏差的方法[J].天津建設科技,2012(2):59 -60.(HU Zhaohui.Methods to reduce the axis deviation in long-distance pipe jacking[J].Tianjin Construction Technology,2012(2):59-60.(in Chinese))
[11] 鮑立平,陳林,范東方,等.超長距離大口徑鋼頂管曲線頂進軌跡的控制技術[J].中國市政工程,2011(6):60-63.(BAO Liping,CHEN Lin,F(xiàn)AN Dongfang,et al.Control technology for curved jacking in super-long-distance large-diameter steel pipe jacking[J].China Municipal Engineering,2011(6):60-63.(in Chinese))
[12] 董建.應用圖像識別技術的頂管機機頭姿態(tài)測量方法[C]//2009中國城市地下空間開發(fā)高峰論壇論文集.北京:中國市政工程協(xié)會,2009:184-186.(DONG Jian.Survey method for cutterhead attitude of pipe-jacking machine by means of image recognition technology[C]//Proceedings of Summit on Development of Urban Underground Space in China held in 2009.Beijing:China Municipal Engineering Association,2009:184 -186.(in Chinese))
[13] 梁文藹.大型機械頂管頂進姿態(tài)控制技術應用[J].建筑工程技術與計,2014(14):817.(LIANG Wen'ai.Attitude control technology for tunneling by large pipe-jacking machine[J].Architectural Engineering Technology and Design,2014(14):817.(in Chinese))
[14] 張繼唐.復雜地質(zhì)環(huán)境穿越黃河長距離頂管質(zhì)量控制[J].科技創(chuàng)新與應用,2013(18):241.(ZHANG Jitang.Quality control in tunneling through complex geological conditions crossing Yellow River by means of pipe-jacking method[J].Scientific Innovation and Application,2013(18):241.(in Chinese))
[15] 羅鑫.矩形頂管頂進中防側(cè)轉(zhuǎn)控制技術[J].建筑施工,2012,34(6):607 - 609.(LUO Xin.Control technology for anti-side-overturn during rectangle pipe jacking operation[J].Building Construction,2012,34(6):607 - 609.(in Chinese))
猜你喜歡
建材發(fā)展導向(2022年18期)2022-09-22 07:13:20
建材發(fā)展導向(2022年12期)2022-08-19 02:33:10
建材發(fā)展導向(2022年10期)2022-07-28 03:04:36
建材發(fā)展導向(2021年22期)2022-01-18 06:12:46
建材發(fā)展導向(2021年19期)2021-12-06 03:20:50
建材發(fā)展導向(2021年18期)2021-11-05 09:19:50
建材發(fā)展導向(2021年12期)2021-07-22 08:06:58
建材發(fā)展導向(2021年9期)2021-07-16 07:11:36
上海建材(2017年4期)2017-10-16 01:33:34
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:48
