距離走動補償優化及FPGA實現
2015-04-20 00:44:12馬婷婷李毓琦成思文
制導與引信 2015年4期
關鍵詞:信號
馬婷婷, 李毓琦, 成思文
(上海無線電設備研究所,上海200090)
0 引言
雷達探測遠距離徑向運動目標時,發射脈沖串信號,然后對回波進行長時間相參積累,再對每個距離門的回波信號進行多普勒濾波,以提高對微弱目標的探測能力[1]。然而對于高速運動目標而言,目標相對于雷達的徑向運動會引起回波包絡在脈沖重復周期內發生走動。例如目標徑向速度為600m/s,雷達的距離門為75m,在1s的積累時間內目標跨越8個距離門,造成目標能量分散在很多個距離單元中。直接按距離門進行FFT 時,信噪比損失嚴重,相參積累性能下降。因此,在相參積累前,需要對距離走動進行補償,使回波包絡對齊。
本文在分析距離走動原理的基礎上,針對常用的目標回波包絡補償算法普遍運算量較大的問題,提出了抽取移位補償方法,避免了運算冗余,減少了運算量和處理時間。
1 常用距離走動補償方法
PD 雷達發射一長串線性調頻脈沖。發射脈沖的脈寬為Tp,調頻速率為γ,載頻為fc,忽略對后續相參積累沒有影響的時頻耦合項[2],則第m個脈沖的基帶回波為

式中:τm為第m 個脈沖的延遲。
設目標離雷達的初始位置為R0,徑向速度為v,則第m 個脈沖到達時刻,目標與雷達之間的距離為Rm=R0+vmT,則

式中:T 為雷達發射脈沖重復周期。
對目標基帶回波進行脈沖壓縮后,得

式中:B 為信號的帶寬,B =γTp。從式(3)可以看出,脈沖壓縮后的信號包絡呈sinc函數,且中心位于τm處。
由式(2)和式(3)可知,對于運動目標,徑向速度導致每個脈沖回波延遲τm不一樣,每個脈沖壓縮后信號包絡的中心位置也不同,即發生了包絡走動。
從慢時間維看,將會導致目標能量分散,幅度降低,主瓣展寬,獲得的信噪比很差,不能從雜波中檢測目標。因此,需要對回波信號進行距離走動補償,使得包絡在慢時間維對齊。
包絡走動補償是在離散化后完成的。此時進行移動是以采樣周期為單位的,若目標的回波真實延遲是采樣周期的分數倍,則會產生補償誤差。
常用的補償算法有包絡移位插值、頻域校正法和Keystone變換法[3]。
(1)包絡移位插值法
包絡移位插值法是對目標回波進行線性插值重構,然后進行時域移位使回波包絡對齊。為了減少運算量,一般將線性插值和移位合并處理。包絡移位插值法的優點是可以一次性補償分數階的延遲差,但是,在采樣值較多的情況下,插值運算使得移位的運算量大大增加。
(2)頻域校正法
頻域校正法是在數字頻域脈沖壓縮時,在頻域上乘以延遲因子,補償各個脈沖之間的包絡走動差。但是,在窄帶系統中,頻域脈沖壓縮處理的運算量和復雜度都大于時域脈沖壓縮處理。
(3)Keystone變換法
Keystone變換法是將回波變換到快時間維上進行插值,再做慢時間尺度變換,以校正回波跨距離單元的走動。需要對脈沖壓縮后的信號在快時間維進行傅里葉變換,再對頻域信號進行慢時間維尺度變換。在積累脈沖數較多的情況下運算量較大。
2 抽取移位補償方法
雷達積累處理系統框圖,如圖1所示。
常用距離走動補償在抽取降采樣之后實現。本文將抽取降采樣和距離走動補償合并處理,構建抽取移位補償方法。基于抽取移位補償法的雷達系統框圖,如圖2所示。

圖1 雷達積累處理系統

圖2 基于抽取移位補償法的雷達積累處理系統
傳統意義上抽取降采樣對離散信號固定位置抽取,對抽取后的信號序列補償[4]。抽取移位補償方法是將抽取降采樣與距離走動補償重新統籌,分成變動抽取和脈間循環移位兩部分完成走動補償。
將數字下變頻后的信號看成一組橫向序列,變動抽取降采樣是指不同組的信號序列抽取位置是動態的,脈內循環移位是在同一脈沖內,將抽取后的信號進行移位處理。因此,抽取移位補償方法的核心是根據距離走動量推導出變動抽取位置以及循環移位量。
2.1 補償參數設計
處理機對回波在快時間維進行采樣,每個回波采樣點數為N,接收到M 個回波脈沖后,按矩陣方式排列,橫向為快時間維,縱向為慢時間維。若長時間積累,目標回波包絡就會發生走動,需要補償,保證目標回波能量聚集在同一個距離單元,提高相參積累后的信噪比。
設采樣信號經過數字下變頻后為sm(n),距離走動校正后信號為ym(n),抽取倍數為L,則

如圖3所示,斜線點表示對回波采樣,采樣率為fs。距離走動,信號分散在不同距離門內。距離走動補償是將信號集中到同一距離門內并L倍抽取,得到補償后的信號,如水平線點表示,信號集中在第0 號距離門,速率為fs,L,fs=L×fs,L。將分散在第i號距離門的信號映射到第0號距離門,需補償掉距離走動量ΔRm。
圖3 距離走動補償示意圖
一般目標的回波真實延遲并不是采樣周期的整數倍,若只是以采樣周期為單位進行移位,必然會造成補償誤差。采用小數補償和整數補償兩部分來減少小數階延遲帶來的損失。整數補償以抽取后信號周期為單位進行移位,余下的由小數補償完成。采樣率fs是抽取后信號速率fs,L的L倍,從L 個點中選取1個離目標最近點作為小數補償后的值。可見,小數補償同時完成了抽取工作。
整數補償需在同一組脈沖內部完成移位補償,稱為脈內循環移位補償,設定移位參數為h;小數補償從L 個點中抽取靠近目標最近點時,每次抽取位置不同,稱為變動抽取位置補償,設定抽取參數為q。如圖3 所示,需補償的走動量由小數補償量A 與整數補償B兩部分組成。因此,根據走動量計算出參數q、h值是完成距離走動補償的關鍵。
設ADC采樣時距離分辨單元為ΔC1,抽取后距離分辨單元為ΔC2,彈目徑向速度為v,由式(4)可得
當前脈沖周期內距離走動量為ΔRm,那么脈內循環移位補償的移位參數為

式中:int(·)表示取整。
信號點按照移位量h 移位后,將總的走動量減去整數階移動量,余下的走動量以變動抽取位置補償,抽取參數為

脈沖內的回波信號看成一組序列,從每L 個點中取第q 個值,再按h值進行移位,重新排列后的信號會聚集在同一距離門內,完成走動補償。
2.2 抽取移位補償的FPGA設計
FPGA 內置豐富的BlockRAM 存儲資源,并具有并行流水快速實現算法功能的優勢。根據計算整數階移位補償及小數階抽取補償方法,在FPGA 中給予映射并實現。
小數階主要是根據抽取位置q不同來實現補償,整數階主要是根據移位量h 來實現對齊。整個算法實現主要分成控制模塊、雙口RAM 存儲模塊以及補償參數計算模塊。FPGA 做校正的模塊框圖如圖4所示。

圖4 校正模塊框圖
控制模塊是用狀態機來控制整個系統數據流向以及各個模塊時序狀態;雙口RAM 存儲模塊是緩存小數階補償并抽取后的數據,最終根據控制信號輸出不同起始地址數據,對緩存中的數據進行移位輸出,得到距離補償后的數據;算取參數補償模塊是以一個脈沖周期為時間單位,并乘以當前速度v,來進行算取距離走動量,結合以上給出的公式,計算出小數階補償抽取位置q 和整數階循環移位量h。FPGA 實現流程圖如圖5所示。

圖5 距離走動補償FPGA 實現流程
為了保證一個脈沖周期內的數據在當前周期進行循環移位而不會被移到相鄰脈沖之中,采取以下做法:當以h為首地址讀取雙口RAM 時,若讀到尾地址,則循環到0地址繼續讀取,直到讀取到h-1地址。這樣循環讀取數據N 點數據即表示本脈沖周期內距離走動補償完成。
2.3 抽取移位補償的FPGA設計
由式(7)和(8)可見,在計算q以及h 時,需要使用乘法器和除法器,在FPGA 中可以調用乘法器和除法器的IP 核。計算距離走動量需要1個乘法器IP核,流水延時3個時鐘周期;計算h 值時需1個乘法器IP 核,并有3個時鐘流水延遲;算取q值時需1個乘法器IP核和一個除法器,至少有6個時鐘流水延遲。
重新分析公式,計算q 以及h 可以看成是距離走動量對fs,L求商、求余,并余數對以fs求商的過程。
考慮到fs及fs,L均為2的冪次方,在計算這兩個參數時可以進行優化,求余求商的過程用減法器以及移位過程來替代,流水延時2個時鐘周期。具體對比結果,如表1所示。
表1 優化前后資源、運算量及延時對比
可以看出,原調用IP核來計算參數的過程就可以轉換為采用簡單的移位累加邏輯來實現,這在FPGA 中不僅可以節省使用資源,還可以減少結果輸出延時。
3 實測結果分析
為了驗證此種距離走動補償實現方法的性能,將此模塊應用到探索一代項目中,在長時間積累前進行距離走動補償。雷達接收機輸出中心頻率為60 MHz、帶寬為2 MHz的中頻信號。考慮到信號帶寬遠小于中心頻率,采用帶通采樣技術,以降低成本,便于后續處理,選用ADC 采樣率fs為16 MHz。
為了滿足輸出信號速率大于等于原信號帶寬,以8倍進行抽取,抽取以后信號速率fs,L為2 MHz。一個脈沖周期內有512個距離波門,積累脈沖周期為1 024個。在雷達導引頭工作前,由系統預定裝置速度為8km/s。
FPGA 采 用XilinxVirtex5 的XC5VSX95T器件,在ISE平臺綜合實現。將FPGA 補償后的結果通過RapidIO 接口實時送入DSP,并將數據導入Matlab中進行分析對比。補償前后脈沖相對位置,如圖6所示。
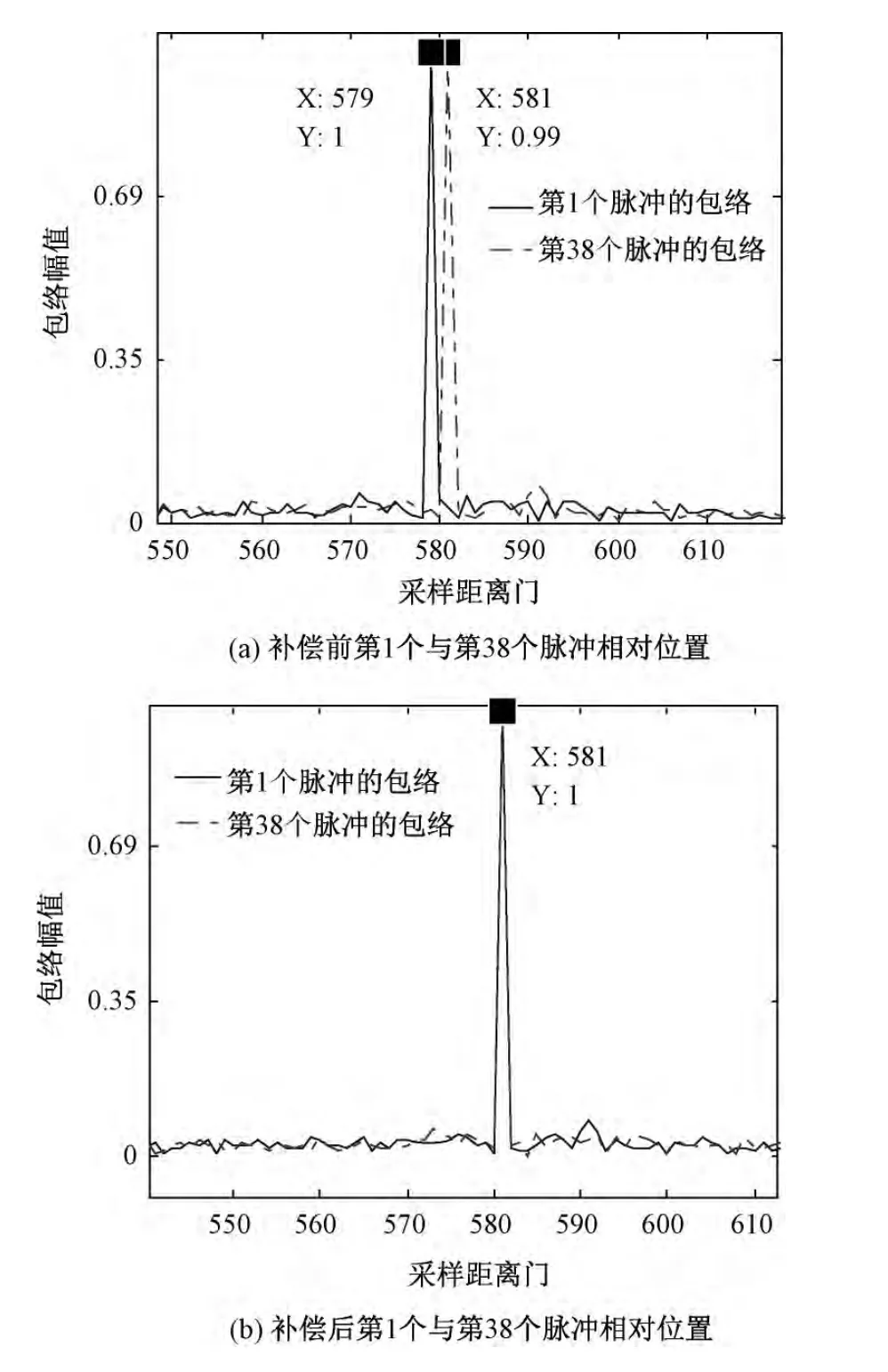
圖6 補償前后脈沖相對位置對比圖
以第1個回波的脈沖包絡與第38個回波的脈沖包絡為例進行對比,補償前,距離走動現象如圖6(a)所示,相對走動了2個距離門。經本文提出的抽取移位補償后,如圖6(b)所示,在第581個距離門內包絡重疊,即表示回波在第581個距離門能量達到聚集。
再對補償前后相參積累結果進行對比,目標靜止時信噪比為38.9dB,不補償距離走動的情況下信噪比為30.6dB,補償距離走動后的信噪比為38.8dB。
可以發現,采用抽取移位補償后,回波信號得到了很好的積累,幾乎接近于目標靜止時的信噪比。
用優化后的結構,對回波進行走動補償,并進行相參積累。補償前后的回波時域信號,如圖7所示。
可以看出,補償前各個脈沖能分量散在579、580及581等不同距離門內,隨著脈沖積累增多,能量走動越嚴重,而經過補償后,能量全部集中在第581個距離門,排列整齊,相參積累做多普勒濾波時,能獲得很好的信噪比,可以快速檢測到目標位置。
4 結束語
結合實際工程應用特點,本文提出結構簡單、易基于FPGA 實現的距離走動補償的方法,采取小數階和整數階分開補償,取得了良好的補償效果。
相比于插值移位法,小數階抽取補償和整數階移位補償大大減小了運算量,實現結構簡單。另外對獲取補償所需要的抽取和移位參數的運算進行了優化,進一步減少運算量的同時,節約了乘法器資源,縮短了運算延時時間,提高了系統的實時處理能力。

圖7 補償前后時域相參積累能量對比圖
[1] 丁鷺飛,耿富錄.雷達原理(第三版)[M].西安:西安電子科技大學出版社,2002.
[2] 陳遠征,朱永鋒,趙宏鐘,等.基于包絡插值移位補償的高速運動目標的積累檢測算法研究[J].信號處理,2004,20(4):387-390.
[3] 夏卓卿.脈沖多普勒雷達長時間積累技術研究[D].成都:電子科技大學,2010.
[4] D J Rabideau,P Parker,D Rabideau.Ubiquitous MIMO Digital Array Radar[C].Conference Record of the 37th Asilomar Conference on Signals,Systems and Computers,2003:1057-1064.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06