有界控制導彈隨機最優制導律①
2015-04-25 01:03:01花文華孟慶齡張金鵬
固體火箭技術 2015年1期
關鍵詞:設計
花文華,孟慶齡,張金鵬,2
(1.中國空空導彈研究院,洛陽 471009;2.航空制導武器航空科技重點實驗室,洛陽 471009)
?
有界控制導彈隨機最優制導律①
花文華1,孟慶齡1,張金鵬1,2
(1.中國空空導彈研究院,洛陽 471009;2.航空制導武器航空科技重點實驗室,洛陽 471009)
為削弱加速度界和系統噪聲對攔截導彈性能的影響,基于隨機控制理論,設計了一種考慮有界控制的隨機最優制導律(stochastic optimal guidance law,SOGL)。通過系統降階與性能指標變換和隨機輸入描述函數近似,將攔截導彈的控制有界和狀態估計誤差考慮到了該制導律的設計當中。同時,為削弱目標加速度估計延遲的影響,提出了一種SOGL的補償形式,并基于Monte Carlo方法進行了仿真驗證。結果表明,SOGL相比于傳統的最優制導律性能得到了明顯改善,而其補償形式削弱了濾波器估計延遲的影響,更適用于目標機動存在切變的情形。
制導律;隨機控制;有界控制;目標攔截
0 引言
有界控制是導彈制導系統設計中需要加以考慮的重要內容。基于線性二次型性能指標的制導方法,由于目標機動和量測噪聲的影響,在制導末端往往要求較強的機動性能,如果不加以有效控制將直接影響最終的制導精度。傳統的制導律和估計器設計方法大多基于確定性等價原理[1],二者分別針對完全信息情形和非完全信息情形獨立優化,而在實際執行中,為考慮有界控制,直接將由估計狀態所構建的控制命令加以飽和約束,所得到的最終結果并不是最優的。文獻[2]正是采用了這一設計思路給出了一種有界控制制導律。文獻[3-4]基于廣義分離原理,將估計結果的概率密度函數考慮到制導律的設計當中,分別針對非線性和近似線性攔截情形,設計了相應的飽和最優制導律,但是該類型制導律包含較為復雜的數學計算,特別是涉及到末端狀態已知的時變Riccati微分方程組的求解,工程上較難實現。
本文考慮攔截導彈具有有界控制的非完全信息情形,通過適當的系統模型和性能指標轉換,設計一種有界控制隨機最優制導律,并不涉及到復雜的數學計算問題,更易于實際執行,同時考慮濾波器估計延遲的影響,給出一種改進形式。
1 問題描述及建模
1.1 彈目相對運動關系數學描述
制導末端攔截導彈和目標的相對運動關系如圖1所示。圖中,X軸沿初始視線方向;下標m和t分別表示二者的相關狀態;q為視線角;r表示攔截導彈和目標之間的相對距離;二者相對于初始視線方向的位移為y。

圖1 平面相對運動關系Fig.1 Planer engagement geometry
基于下述假設進行問題的研究:
(1)攔截導彈和目標可視為質點,并可沿初始視線方向實現近似線性化;
(2)二者速度大小不變,近似具有一階控制系統或自動駕駛儀動態;
(3)攔截導彈可對相對運動關系和自身的相關狀態進行噪聲下的量測,目標無法獲取導彈的相關信息,但可意識到攔截企圖,從而隨機規避機動。
考慮攔截導彈的有控制性并基于上述假設條件,選取狀態變量為x=[yvatam]T,則系統狀態方程可以近似表示為
(1)
其中
式中ωm、ωt為相互獨立的零均值高斯白噪聲;σm、σt分別為標準方差;τm、τt分別為攔截導彈和目標的控制系統時間常數;amc、atc為相應的控制命令;sat()表示飽和函數。
基于假設(1)和假設(2),攔截導彈飛行時間為
tf=r0/Vc
(2)
式中r0為彈目初始距離;Vc為接近速度,近似為(Vm+Vt)。
剩余飛行時間可表示為
tgo=tf-t
(3)
1.2 量測方程
結合圖1,采用一定的彈上設備,如導引頭可對相對距離r、視線角q進行量測。假設r是可精確量測的,q具有一定的量測噪聲,并且假設噪聲為白噪聲且符合高斯分布,標準方差為σq,則量測方程可表示為
z=Hx+vq
(4)
式中H=[1/r0 0 ];vq為量測噪聲。
2 估計器和制導律設計
2.1 系統降階
定義線性二次型性能指標:
(5)
式中G=diag(g,0,0,0);g為加權系數,一定程度上體現了導彈攔截性能和機動性能之間的折中。
基于式(1)所示的隨機狀態方程和性能指標(5)推導攔截導彈制導律,必然會涉及到終端條件已知的Riccati方程組求解,為避免這一過程,本文采用了系統降階變換的設計方法。文獻[5]提出了一種稱為終端投影變換的系統降階方法,采用零效脫靶量Z作為新的狀態變量,以降低系統的維度。結合式(1),可求得
(6)
其中
θm=tgo/τm
θt=tgo/τt
ψ(k)=exp(-k)+k-1
將式(6)兩邊對t求導:
(7)
系統被降階為以零效脫靶量作為狀態變量的形式,當t=tf時,由式(6)可得到Z(tf)=y(tf),因此性能指標可進一步轉化為
(8)
這一降階過程并不涉及到近似變換,可適用于攔截導彈存在飽和非線性控制特性的情形,下文還將進行進一步的轉換。
2.2 估計器設計
根據廣義分離原理,估計器可獨立于控制器進行設計。降階后的系統以零效脫靶量作為狀態變量,估計器需要對這一狀態實現估計,因此結合系統(1)和量測方程(4),Kalman濾波器的狀態變量進一步定義為z=[Z(t)vatamatc]T,則狀態方程可以表示為
(9)
其中
本文主要應用成型濾波器[6]方法表示目標的隨機機動策略,采用隨機輸入驅動系統,wtc是標準方差為σtc的白噪聲過程。相應的量測方程轉化為
y=Hzz+vq
(10)
其中
(11)
則Kalman濾波方程可表示為
(12)

E(η(t)η(τ))=Rδ(t-τ)
(13)
式中δ(t-τ)是Dirac函數。
Kalman濾波增益為
(14)
其中,P滿足以下Riccati微分方程:
(15)
式中Q為過程噪聲協方差陣;P(0)=E(z(0)zT(0))。
2.3 隨機最優制導律推導
性能指標(8)可進一步表示為
(16)

(17)
結合式(12),sat(amc)通過Kalman方程只對估計值產生作用,與估計誤差無關,因此制導律的設計只需要對性能指標JZ進行優化。
將式(12)展開,可得
(18)
(19)
式中K1和K5分別對應K的第1和第5個元素。
雖然進行了一定的轉換,式(17)和式(18)所表示的非線性優化問題,仍無法通過一般的方法進行求解。為便于問題的求解,給出一個假設條件。
比例導引、擴展比例導引及最優制導律等典型制導方法在表達形式上可歸結為一種統一的形式:
(20)
式中N為導航增益。
本文假設最終所得到的制導律具有如式(20)所示的典型形式,問題進一步轉化為導航增益的設計問題,以降低求解的復雜性。參考文獻[4,7],并采用隨即輸入描述函數(random input description function, RIDF)近似飽和函數,則式(18)可進一步表示為
(21)
其中
(22)

基于上述假設和近似,由式(17)可得
(23)
(24)
(25)
制導律的設計最終轉化為狀態方程式(24)約束下針對性能指標式(23)的優化問題。由此,構造Hamiltonian函數,可以得到:
(26)
式中λ為Lagrange乘子。
由于N表示導航增益且相對于H是二次的,因此可求得N的最小值為
(27)
進一步由協態方程和橫截條件可得
(28)
代入式(27),可求得制導增益為
(29)
從而,所設計的隨機最優制導律(stochastic optimal guidance law,SOGL)可表示為
(30)
該制導律通過系統降階和性能指標變換,考慮到了導彈的有界控制性和狀態估計誤差的影響。
2.4 制導律的進一步改進
由上節的推導過程可看出,狀態估計誤差的概率密度函數已經被間接考慮到制導律的優化過程當中,可改善制導精度。但是,估計器的引入會帶來一個明顯的問題就是估計延遲,因此為進一步改進導彈的攔截性能,應要求估計誤差方差和估計延遲同時的最小化,但這2種要求是存在矛盾的。一種可行的制導方案是將估計延遲因素也考慮到制導律的設計當中,采用補償或者自適應帶寬等方式,實現估計器估計誤差方差和估計延遲的設計折中,從而改進攔截性能。
目標加速度估計延遲對攔截性能的影響最為明顯,本文給出一種針對目標加速度估計值的直接補償方法。將由估計延遲產生的目標加速度可達集(不確定集)的中心值代替目標加速度估計值,下面給出具體的推導過程。
由式(1)可得
at(t)=exp(-δ/τt)at(t-δ)+
(31)

(32)
(33)
因此,對于具有延遲的目標加速度有
[at(t)]min≤at(t)≤[at(t)]max
(34)
將at(t)采用由延遲產生的不確定集的中心值代替:
at(t)=([at(t)]min+[at(t)]max)/2
=at(t-δ)exp(-δ/τE)
(35)
因此,零效脫靶量可進一步修正為
(36)
其中,δ對應假設的目標加速度估計延遲。采用這一零效脫靶量表達形式用于SOGL的相關計算。改進后的形式采用CSOGL (Compensated SOGL)表示。由式(36)可得
3 仿真結果及分析
主要針對一類迎面末端攔截情形進行了仿真研究,如圖1所示,γm(0)≈0,γt(0)≈0,其他仿真參數如表1所示,其中T為采樣時間。針對2種形式的目標機動進行了制導律SOGL和CSOGL的驗證和比較。仿真基于Monte Carlo法,并采用單發命中概率[8](single shot kill probability, SSKP)作為目標攔截性能的衡量指標。

表1 仿真參數Table 1 Simulation parameters
(1)“bang-bang”目標機動
具有隨機時間切換的“bang-bang”機動被認為是最優的規避機動形式[9-10]。假設目標機動命令切換時間為tsw,圖2為tsw=1.5 s情形下的目標加速度估計,當估計器具有足夠的收斂時間時,可實現目標加速的較好估計。圖3(a)和圖3(b)分別為該情形下相應于制導律SOGL的導航增益變化曲線和脫靶量曲線,可以看出,由于受到目標機動和量測噪聲的影響,導航增益峰值Nmax出現在制導末端,要求導彈具有較強的機動性能,最終的脫靶量為0.580 7 m,具有較高的制導精度。

圖2 目標加速度閉環估計,“bang-bang”機動Fig.2 Close-loop estimation of target acceleration, bang-bang maneuver

(a)導航增益,SOGL

(b)脫靶量,SOGL

(a)脫靶量

(b)導航增益峰值,SOGL
圖5給出了在“bang-bang”目標機動情形下,SOGL和CSOGL的累積脫靶量分布情況,仿真中,兩者取相同的目標機動命令切換時間和隨機數產生器種子。可以看出,對于給定的SSKP,例如SSKP=0.95,采用制導律CSOGL 所要求的彈頭殺傷半徑小于SOGL,總體而言具有較好的攔截性能。

圖5 累積脫靶量分布:SOGL和CSOGLFig.5 Cumulative miss distance distribution: SOGL and CSOGL
(2)常值目標機動
最優制導律(optimal guidance law,OGL)的推導基于目標常值機動的假設,為進一步驗證所設計的制導律的性能,假設目標做常值機動。圖6對3種制導律——OGL、SOGL和CSOGL的攔截性能進行了比較,所設計的有界控制隨機最優制導律SOGL相比于OGL具有明顯的性能優勢,而CSOGL的性能則較差,更適用于目標機動命令存在切變而造成估計延遲的情形。
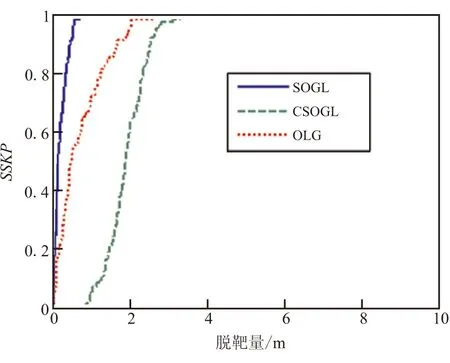
圖6 累積脫靶量分布:OGL、SOGL和CSOGLFig.6 Cumulative miss distance distribution: OGL,SOGL and CSOGL
4 結論
(1)SOGL將攔截導彈的有界控制性和狀態估計誤差直接考慮到制導律的設計當中,為避免指令飽和,實現了彈道的及時調整,并削弱了濾波器估計誤差的影響,制導性能優于最優制導律。
(2)CSOGL在SOGL的基礎上進一步考慮了濾波器估計目標加速度延遲的影響,通過制導律的改進設計,估計延遲的影響被有效削弱,因此更適用于目標機動存在切變的情形,該情形下的整體性能會優于SOGL。
(3)SOGL和CSOGL在實現上并不涉及到復雜的數學計算,可適用于工程應用。
[1] Shinar J,Shima T.Nonorthodox guidance law development approach for intercepting maneuvering targets[J].Journal of Guidance,Control and Dynamics,2002,25(4):658-666.
[2] 花文華,陳興林.變速導彈有界控制非線性微分對策制導律 [J].控制與決策,2011,26(12):1886-1890.
[3] Hexner G,Shima T.Stochastic optimal control guidance law with bounded acceleration [J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(1):71-78.
[4] Hexner G,Shima T,Weiss H.LQG guidance law with bounded acceleration command [J].IEEE Transactions on Aerospace and Electronic Systems,2008,44(1):77-86.
[5] Bryson E A,Ho C Y.Applied optimal control [M].Waltham,America:Blaisdell,1969:154-155.
[6] Zarchan P.Representation of realistic evasive maneuvers by the use of shaping filters [J].Journal of Guidance and Control,1979,2(1):290-295.
[7] G?kcek C,Kabamba P T,Meerkov S M.Disturbance rejection in control systems with saturating actuators [J].Nonlinear Analysis,2000,40(1-8):213-226.
[8] 花文華,陳興林,宋申民.基于多模型自適應估計的混合策略微分對策制導[J].宇航學報,2010,32(6):1582-1588.
[9] Shinar J,Steinberg D.Analysis of optimal evasive maneuvers based on a linearized two-dimensional kinematic model [J].Journal of Aircraft,1977,14(8):795-802.
[10] Shinar J,Turetsky V,Oshman Y.Integrated estimation/ guidance design approach for improved homing against randomly maneuvering targets [J].Journal of Guidance,Control,and Dynamics,2007,30(1):154-161.
(編輯:呂耀輝)
Stochastic optimal guidance law for bounded-control missiles
HUA Wen-hua1,MENG Qing-ling1,ZHANG Jin-peng1,2
(1.China Airborne Missile Academy,Luoyang 471009,China;2.Aviation Key Laboratory of Science and Technology on Airborne Guided Weapons,Luoyang 471009,China)
Based on stochastic control theory,a stochastic optimal guidance law(SOGL)considering bounded control was presented to weaken the effects of acceleration boundary and system noise of interception missiles.The control boundary and states estimation error were brought into design of the guidance law by use of system order reduction,performance index transformation and random-input description function approximation.To further reduce the effect of estimation delay,a compensated SOGL was proposed.Based on Monte Carlo method,simulations were carried out.As compared to traditional optimal guidance law,the simulation results show that the interception performance of SOGL is improved and the compensated SOGL weakens the effects of estimation delay of filter and is more suitable for target with switching maneuver.
guidance law;stochastic control;bounded control;target interception
2013-11-28;
:2014-02-24。
航空科學基金重點項目(20110112001)。
花文華(1983—),男,博士,主要研究方向為飛行器制導與控制。E-mail:huawh6611@163.com
V448
A
1006-2793(2015)01-0007-05
10.7673/j.issn.1006-2793.2015.01.002
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04