基于測量系統量值特性的不確定度評定研究
2015-04-25 07:15:10陳育蕾
統計與決策 2015年1期
陳育蕾
(1.中國計量學院,杭州310034;2.浙江省哲學社會科學重點研究基地、浙江省標準化與知識產權管理人文社科重點研究基地,杭州 310034)
在不同測量過程中,根據研究目的、側重點及測量系統組成因素的不同,每個測量系統不確定度來源會有所差異,但測量系統也具有共性的方面。因此,美國三大汽車公司通用、福特和克萊斯勒等聯合推行測量系統分析,提出了測量系統評定的5個量值指標即偏移、重復性、復現性、穩定性和線性等。這5個量值特性不僅反映了不確定度的基本特征,也可以作為測量系統的不確定度主要來源。按照JJF1059.1-2012技術規范,選擇5個量值指標的測量不確定評定的適合方法,分別計算不確定度分量,按照不確定度合成方法獲得測量系統的總不確定度,并完成不確定度報告。這樣做使不確定評定結果更準確,不確定度來源分析更全面,且比以往的方法更簡單直觀[1~3]。
1 測量系統量值特性分析方法的測量模型[4,5]
被測量的某個特性的測得的量值記為Y,零件的約定量值為x,真實值在實際測量中無法得到,誤差記為ε。那么:

假設被測量和測量者之間不存在交互作用或交互作用接近0,這意味著測量者對所有被測量是相同的,該模型稱為可疊加模型。實際上疊加性假定不總是都成立,但是實際應用中交互作用引起的不確定度較小,可以將其忽略[6]。
因此,將5個量值特性指標表示的誤差方法改換為測量系統不確定度評定,也就是把式(3)改成:

其中U是總不確定度,u是合成標準不確定度,k是包含因子。
2 測量系統不確定度評定[2,7]
2.1 偏移引起的不確定度評定
偏移是系統測量誤差的估算值。對于測量次數是n,此樣本的約定量值x0,測得值為xi,其中i從1到n。觀測平均值:

由上可知:偏移b引起的不確定度u1包括,樣本平均值xˉ所引起的不確定度u11,另一個是約定量值x0引起的不確定度u12。測量平均值引起的不確定度為u11,屬于A類評定。其計算公式如下:

2.2 重復性和復現性引起的測量不確定度評定
重復性測量條件是指相同操作者、測量程序、測量系統、操作條件和地點,并在短時間內對同一或相類似被測對象重復測量的條件下進行。復現性測量條件是指在不同測量系統、不同地點、不同操作者、對同一或相類似對象重復測量的一組測量條件。
2.2.1 測量系統重復性與復現性研究采用均值—極差法[1,8]
均值-極差分析法用于正態分布的前提下,估計單次測量結果試驗標準偏差s的一種方法,屬于不確定度的A類評定。在重復條件下,對觀察對象進行測量(重復測量次數少于10次為一組),分別測量了m組,每組的重復次數相同,都為n次,測量結果xij(i從1到n,j從1到m),則通過每一組的極差Rj=maxxij-minxij的平均值:

其中,C為極差系數可以查表獲得。
我們結合檢測實驗室的相關數據來了解均值極差法的步驟。數據來源于參考文獻[8],該測試過程是以二等環規標準作基準,對內徑式樣進行測試。數據情況見表1。

表1 數據情況
第一步在利用均值—極差法來分析測量系統時,首先要修正可預見方式變化的測量誤差分量即系統誤差,該測量系統假定系統誤差已被修正。第二步要判斷被測者和測量者之間是否有交互作用。即每位測量者對每個被測者各重復測量2次,計算均值,三個測量者得到30個均值,將每個測量者的10個均值點連成一條線。這3條線幾乎平行,認為零件和測量者之間無交互作用。無交互作用才可以進行第三步計算,如測量結果又交互作用,先進行數據轉換和處理。第三求重復性產生的變差,可以求得:


2.2.2 貝塞爾公式法求重復性和復現性所引起的不確定度
重復性引起的不確定度分量,可用貝塞爾(Bessel)公式法來計算。當以單次數據作為測得值時,測量重復性單次測量的標準差。以多次測量平均值作為測量結果時,重復性則為平均值的標準差。
xi為第i次測量的測得值,xˉ為n次測量所得一組測得值的算術平均值,n為測量次數。

一般設測量儀器的工作范圍為:0~1,選擇能夠覆蓋整個量程的零件m個,通過高精度測量設備測量每個零件的約定量值為:x0j(j從1到m)
對m個零件進行n次測量,測量結果為 xij(i從1到n),計算每個零件的平均值為:
其中d2為極差法求標準差的系數,是個測量次數有關的常數,可查表獲得。
2.3 穩定性引起的不確定度評定
穩定性是指儀器保持其計量特性隨時間恒定的能力。通常穩定性是指測量儀器的計量特性隨時間不變化的能力。但隨著時間的變化,由于這些影響因素都未發生改變,它們對穩定性的影響因此也基本未改變。對于系統穩定性導致的不確定度采用B類評定,假設某測量系統進行定時監控,獲得其穩定度的范圍是:±a,是均勻分布,一般情況下,穩定性的影響不會超過a。即穩定性導致的不確定度分量是:

自由度為:∞。
2.4 線性引起的不確定度評定[7]
在測量周期內,測量儀器的量程內選擇零件,最佳擬合偏移與約定量值,所得直線的斜率乘以零件的過程變差的指數[7]。即指量與量之間按比例、成直線的關系。
一般設測量儀器的工作范圍為:0~1,選擇能夠覆蓋整個量程的零件m個,通過高精度測量設備測量每個零件的約定量值為:x0j(j從1到m)
對m個零件進行n次測量,測量結果為 xij(i從1到n),計算每個零件的平均值為:

2.5 測量系統合成標準不確定度
根據JJF1059.1-2012中測量不確定度合成可知:線性與偏移雖是測量系統2個不同的量值特性指標,但對于測量結果的影響卻是相同的。假設在全量程范圍內各點的偏移均被修正,實際上也就不存在線性引起的不確定度(可參考線性的定義)。因此,進行測量不確定評定時,這2個分量可以看為一個分量,一般由最大偏移來確定。根據不確定度原理及以上的分析,測量系統合成標準不確定度[7]:

3 實例
某車間要對某零件進行不確定度評定。選定一個零件,甲乙丙三個測量者,對每個零件測量20次,所得數據如表2所示,遵照線性分析方法,選定5個零件,一個測量者,對每個零件測量10次,所得數據如表3所示。

表2 測量者甲、乙、丙進行等精度測量的數據
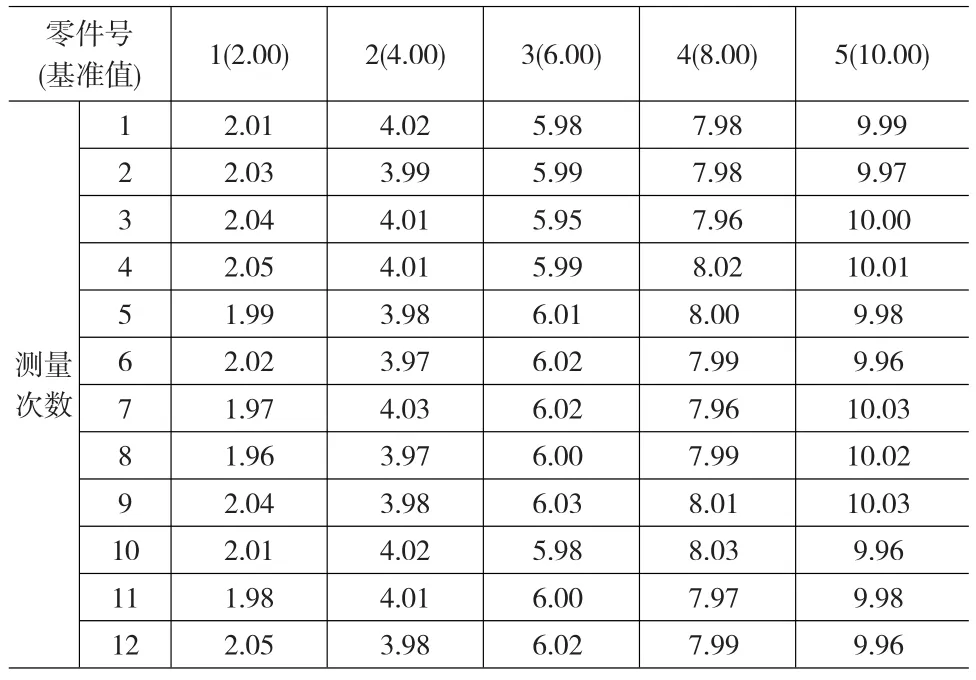
表3 線性度測量數據表
第一步:偏移和線性引起的不確定度分量u1(由2.5可知)
每個測量點的偏移值分別為:-0.0125、0.0025、0.0008、0.01、0.0092,那么:

第二步:重復性引起的不確定度分量u2
由重復性引起的不確定度分量用貝塞爾公式法,應由測量者甲的測量次數來確定:

第四步:穩定性引起的不確定度分量u4
對測量系統進行為期12個小時的觀測,結果發現其偏移機會為0。由于分辨力的原因,對于更細微的變化系統無法測出,因此存在舍入誤差。根據誤差舍入原則,穩定性的范圍±a為±0.0005v。根據均勻分布得穩定性引起的不確定度分量為:

第八步:不確定度報告
環境溫度等環境條件符合各項規程,系統誤差被認為基本被修正。則不確定度為:
U95=0.04947V(包含概率為:95%,包含因子:k=1.96,自由度:veff=362.14196)
[1]JJF1001-2011、JJF1059.1-2012、JJG124-2005技術規范.
[2]薛慶文,孫中泉,張華鋒.基于量值特性的ATS動態測量不確定度評定[J].國外電子測量技術,2010,7(29).
[3]謝少鋒,陳曉懷.測量系統不確定度分析及其動態性研究[J].計量學報,2002,7(23).
[4]Wendle T.Measurement uncertainty[J].Quality Today,2004,6.
[5]Grabe M.Estimation of measurement uncertainty-an alternative to the ISO Guide[J].Metrologia,2001,38(2).
[6]宋明順,陳意華等.測量不確定度評定中忽略相關項所帶來的風險評估[J].A計量學報,2005,26(1).
[7]唐燕杰,陳曉環等.測量系統不確定度研究[J].儀器儀表用戶,2003,10(3).
[8]鄭曉云,張娟娟,李平.均值極差法在質量控制中的應用[J].機械工業標準化與質量,2003,4(8).
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45