RF MEMS并聯(lián)開關(guān)的結(jié)構(gòu)設(shè)計及分析
2015-04-25 09:43:56許馬會劉鳳麗郝永平
四川輕化工大學(xué)學(xué)報(自然科學(xué)版) 2015年6期
關(guān)鍵詞:結(jié)構(gòu)分析
許馬會,劉鳳麗,郝永平
(沈陽理工大學(xué),a.CAD/CAM技術(shù)研究與開發(fā)中心;b.機械工程學(xué)院,沈陽 110159)
引言
RF MEMS開關(guān)是以傳統(tǒng)微電子為基礎(chǔ)發(fā)展起來的一種新興產(chǎn)物,是無線通訊領(lǐng)域的重要器件。它具有成本低、體積小、重量輕、可靠性高等優(yōu)點,在軍、民用領(lǐng)域和微波集成電路中具有廣泛的應(yīng)用前景[1-3]。按照傳統(tǒng)分類方法,RF MEMS可分為固定器件和可動器件。固定RF MEMS器件包括本體微機械加工傳輸線、濾波器和耦合器,可動RF MEMS器件包括開關(guān)、調(diào)諧器和可變電容[4];按照在高頻毫米波電路的應(yīng)用來看,RF MEMS開關(guān)有兩種基本形式:并聯(lián)開關(guān)和串聯(lián)開關(guān)[5]。
本文所設(shè)計的結(jié)構(gòu)與傳統(tǒng)的懸臂梁開關(guān)結(jié)構(gòu)相似,但它比懸臂梁開關(guān)具有更快的恢復(fù)力、較高的開關(guān)速度、較長的開關(guān)壽命,還能防止粘附問題和介質(zhì)擊穿問題以及吸合之后兩邊的接觸端出現(xiàn)翹曲現(xiàn)象(懸臂梁開關(guān)如果結(jié)構(gòu)尺寸設(shè)計的不合理,開關(guān)吸合之后,在接觸端會出現(xiàn)翹曲現(xiàn)象);與目前射頻系統(tǒng)中所用的電控開關(guān)(PIN二極管或GaAs FET)相比,RF MEMS并聯(lián)開關(guān)采用微機械執(zhí)行方式,沒有半導(dǎo)體PN結(jié)或金屬半導(dǎo)體結(jié),插入損耗很低(可小于0.2 dB,而PIN或FET的插入損耗總大于l dB),隔離性能很好,互調(diào)失真極低[6]。
1 并聯(lián)開關(guān)的結(jié)構(gòu)設(shè)計
1.1 基本原理
并聯(lián)開關(guān)的結(jié)構(gòu)如圖1。
此并聯(lián)開關(guān)是兩端固定的,梁和驅(qū)動電極之間形成一個電容,當(dāng)在梁和驅(qū)動電極之間加一偏置電壓時,在梁上就會產(chǎn)生一個下拉靜電力,當(dāng)偏置電壓的值達到驅(qū)動電壓的值時,梁迅速下落,和下電極緊密接觸,這時上下兩個接觸電極接觸,開關(guān)導(dǎo)通。圖2為并聯(lián)開關(guān)AA方向的斷開和閉合的剖視圖。
1.2 結(jié)構(gòu)設(shè)計
并聯(lián)開關(guān)采用高電阻率(3000 Ω·cm)的硅襯底,相對介電常數(shù)εr=11.9,襯底厚度50 μm。同時為了減少傳輸線的導(dǎo)體損耗,選用金作為導(dǎo)體材料,金的電導(dǎo)率為4.1 ×107s/m,厚度為 1 μm,介質(zhì)層采用的是 SiO2。由于開關(guān)的吸合電壓不僅和開關(guān)的材料有關(guān),而且還和開關(guān)的結(jié)構(gòu)尺寸、工藝過程緊密相關(guān),因此本文通過分析開關(guān)的結(jié)構(gòu)尺寸,利用 CoventorWare軟件對 RF MEMES開關(guān)進行工藝設(shè)計,見表1。
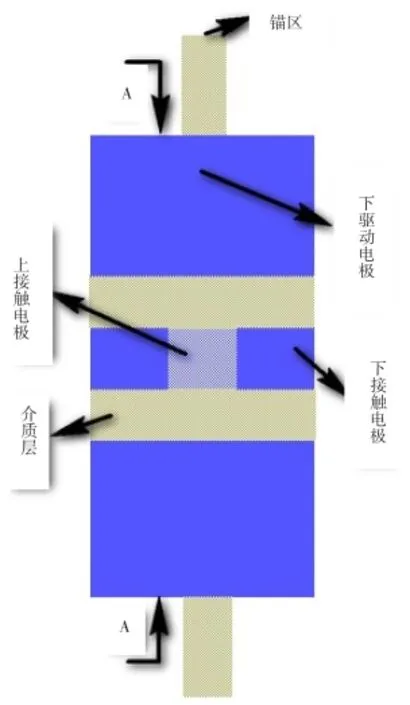
圖1 并聯(lián)開關(guān)的仰視圖
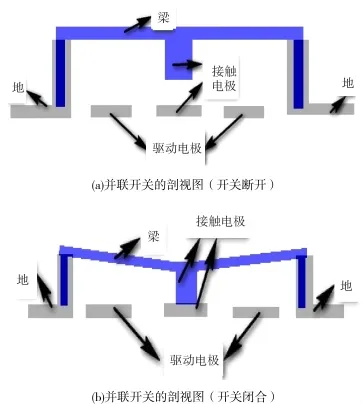
圖2 并聯(lián)開關(guān)A-A方向的斷開和閉合的剖視圖
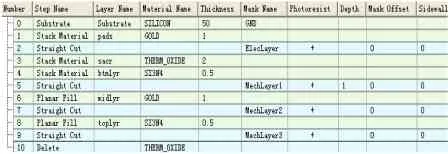
表1 開關(guān)的工藝步驟
為了保證吸合電壓不能過大(可能會造成開關(guān)失效)或過小(不易控制),因此所設(shè)計的開關(guān)的吸合電壓控制在30 V左右,初定開關(guān)的尺寸見表2。
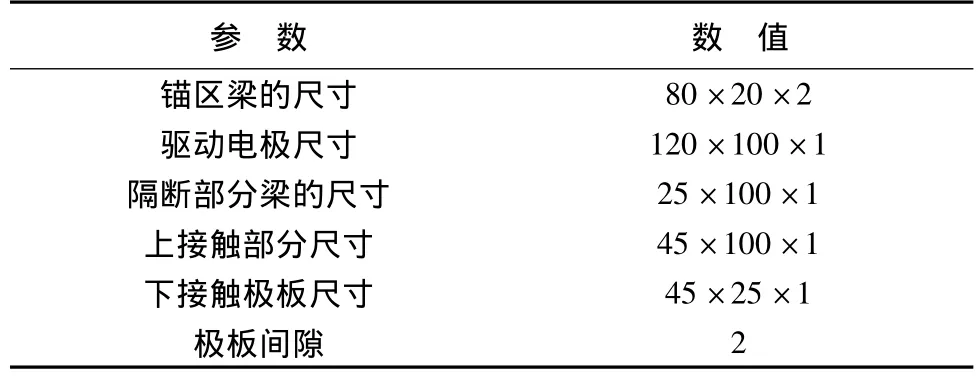
表2 開關(guān)的結(jié)構(gòu)尺寸 (單位:μm)
經(jīng)仿真分析,此時吸合電壓為16 V,不滿足要求。經(jīng)過反復(fù)驗算,最終確定開關(guān)的結(jié)構(gòu)尺寸見表3。
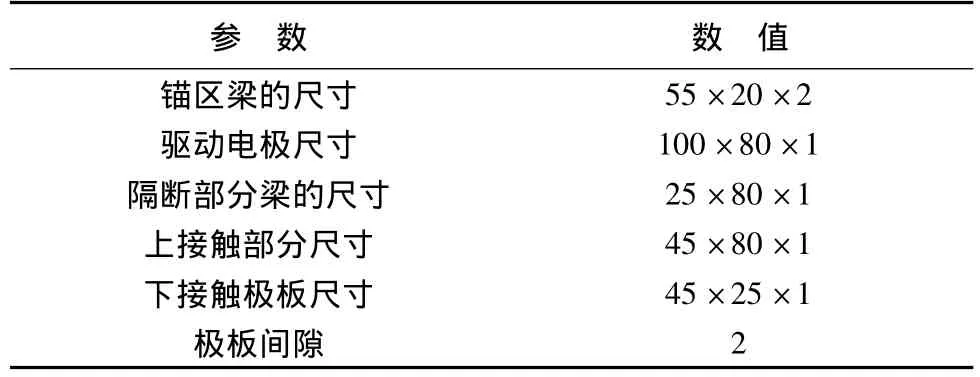
表3 開關(guān)的結(jié)構(gòu)尺寸 (單位:μm)
此開關(guān)的結(jié)構(gòu)主要由梁、驅(qū)動電極、接觸電極組成。其中在驅(qū)動電極上有一層介電層,為了避免開關(guān)作用時直流控制電壓的短路。
2 特性分析及影響因素
2.1 開關(guān)的準(zhǔn)靜態(tài)分析——吸合電壓分析
計算開關(guān)吸合電壓的方法很多:有采用簡單的一維平板假設(shè)進行計算[3];當(dāng)考慮梁的彎曲之后的狀態(tài)時,有采用豎直平面的二維方法進行計算[7];還有完全采用三維的有限元方法進行計算。采用一維方法最簡單,精度也相對較低,三維的方法最精確,也是最復(fù)雜的。為了在易用性和精度上都能達到要求,已經(jīng)有采用準(zhǔn)一維來計算開關(guān)的吸合電壓的方法問世[8-9],也就是將二維的問題轉(zhuǎn)化為一維問題進行處理。
本文所介紹的并聯(lián)開關(guān),計算吸合電壓所采用的是Coventor Ware軟件中的Saber系統(tǒng)仿真法和有限元分析法。
2.1.1 Saber系統(tǒng)仿真分析吸合電壓
根據(jù)第一部分所設(shè)計的開關(guān)結(jié)構(gòu)尺寸,利用Coventor Ware軟件中的Saber進行系統(tǒng)級分析,結(jié)果如圖3所示。
當(dāng)極板間距為2 μm時,電壓達到26 V,懸臂梁和驅(qū)動極板發(fā)生吸合效應(yīng),所以26 V為懸臂梁的吸合電壓。
2.1.2 有限元法分析吸合電壓
根據(jù)開關(guān)的結(jié)構(gòu)尺寸,利用CoventorWare軟件中的有限元分析吸合電壓。圖4為并聯(lián)開關(guān)的FEM模型。經(jīng)分析可以得出懸臂梁的吸合電壓,結(jié)果如圖5所示,吸合電壓大約在28 V左右。
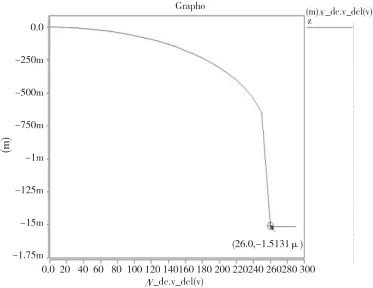
圖3 系統(tǒng)級求解電壓與位移的關(guān)系曲線
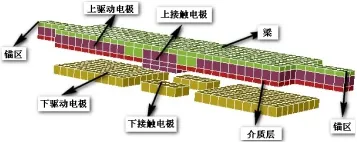
圖4 并聯(lián)開關(guān)的FEM模型
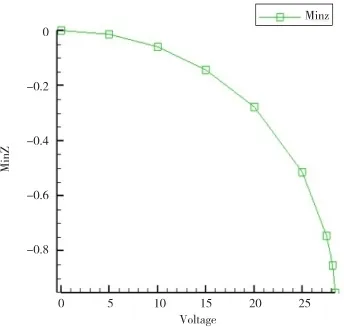
圖5 有限元法求解電壓與位移的關(guān)系曲線
此次采用是 Manhattan bricks的網(wǎng)格類型,X、Y、Z的尺寸為10、10、8。如果將網(wǎng)格的劃分尺寸減為一半,仿真得出的吸合電壓只相差0.3 V,但仿真的時間是原來的8倍,所以在保證結(jié)果相差不超過1%的情況下,盡量將網(wǎng)格尺寸定大一些(結(jié)合開關(guān)的尺寸)。
上述兩種方法得出的吸合電壓結(jié)果相差2V。然后利用公式[10]:

其中k為彈性系數(shù),A為驅(qū)動電極的正對面積,Vpi為開關(guān)的吸合電壓,ε0為極板間介質(zhì)的介電常數(shù),go為極板初始間距。此結(jié)構(gòu)中 k=5.2,A=31 200 μm2,εo=3.9,g0=2 μm,經(jīng)計算開關(guān)的吸合電壓Vpi≈23 V。從上述結(jié)果可以看出,利用公式計算出的結(jié)果與其他兩種方法得出的結(jié)果也有3~5 V的差距,但Saber(幾秒)比有限元(1小時以上)和公式法要快,所以在做系統(tǒng)仿真時一般會用Saber仿真,至于哪個更精確,還有待做實驗進一步確定。
2.2 動態(tài)特性分析
2.2.1 瞬態(tài)應(yīng)力分析
RF MEMS開關(guān)不僅要在閾值加速度可調(diào)范圍內(nèi)能夠安全可靠地工作,還要具有一定的抗過載能力。利用CoventorWare軟件中的Analyzer對RF MEMS開關(guān)進行瞬態(tài)動力學(xué)分析,在Z軸負方向施加周期為800 μs正弦波形,閾值加速度值為10000 g,其應(yīng)力分布如圖6所示。RF MEMS開關(guān)所受到最大應(yīng)力發(fā)生在兩端支撐梁錨區(qū)的根部,只要滿足這部分的應(yīng)力值小于材料的許用應(yīng)力,彈性元件就不會發(fā)生塑性形變,就能使RF MEMS開關(guān)實現(xiàn)抗過載保護。多晶硅的許用應(yīng)力:

其中,n為安全系數(shù),一般取n=4~5。
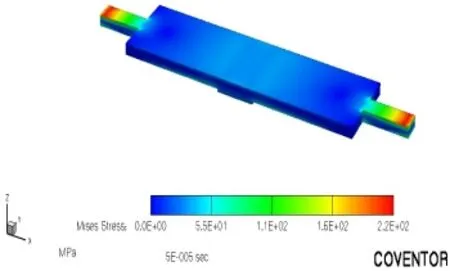
圖6 瞬態(tài)應(yīng)力圖
2.2.2 均布載荷分析
利用CoventorWare軟件中的Analyzer對RF MEMS開關(guān)進行均布載荷分析,在梁的Z方向上加0.01MPa的均布載荷,由圖7可知,當(dāng)梁的最大偏移量達到4.2 um時,梁將發(fā)生斷裂。
2.3 影響開關(guān)吸合電壓的因素
影響開關(guān)吸合電壓的因素主要有開關(guān)的材料與尺寸[11],下面用改變參數(shù)的寬度和長度來介紹尺寸對吸合電壓的影響。圖8為增大和減小左右兩端緊貼錨區(qū)兩個梁的寬度,吸合電壓的變化情況。
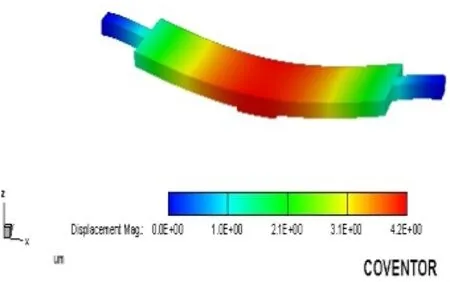
圖7 均布載荷圖
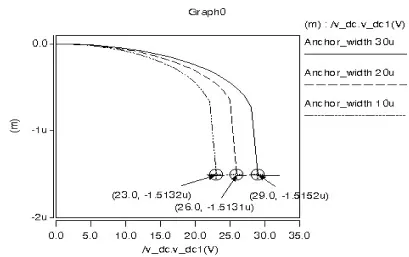
圖8 改變左右兩端緊貼錨區(qū)兩個梁的寬度
圖9為增大和減小左右兩端緊貼錨區(qū)兩個梁的寬度,吸合電壓的變化情況。
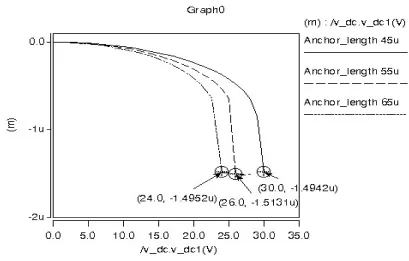
圖9 改變左右兩端緊貼錨區(qū)兩個梁的長度
圖10為增大和減小下驅(qū)動電極的長度,吸合電壓的變化情況。
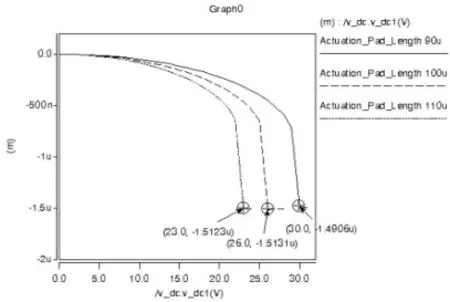
圖10 改變驅(qū)動電極的長度
圖11為減小下接觸電極的長度,吸合電壓的變化情況。
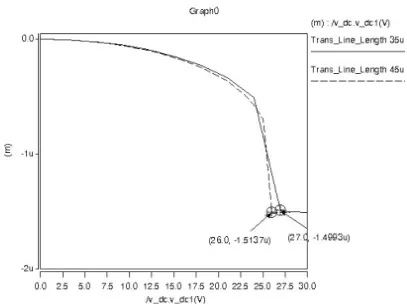
圖11 改變下接觸電極的長度
圖12為減小隔斷部分兩個梁的長度,吸合電壓的變化情況。
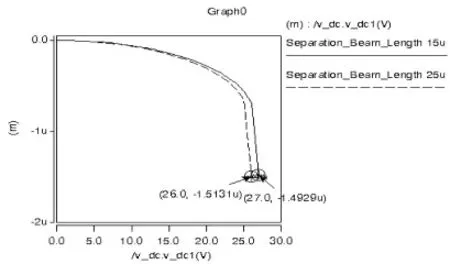
圖12 改變隔斷部分兩個梁的長度
通過圖8~圖12仿真結(jié)果,可以得出以下結(jié)論:
(1)改變開關(guān)參數(shù)的長度和寬度對吸合電壓的影響是不一樣的,吸合電壓會隨著長度的增加而減小(減小而增大),隨著寬度的增大而增大(減小而減小)。
(2)改變隔斷部分兩個梁的長度(下接觸電極的長度),當(dāng)長度超過25 um(45 um)時,吸合電壓保持在26 V,不發(fā)生變化。
(3)吸合電壓不隨下接觸電極寬度的變化而變化。
(4)如果改變下驅(qū)動電極或隔斷部分兩個梁其中一個參數(shù)的寬度,另一個參數(shù)的寬度也將隨之變化,因此不能確定吸合電壓的變化情況。
3 結(jié)束語
本文在研究并聯(lián)開關(guān)結(jié)構(gòu)的基礎(chǔ)上,進一步分析了開關(guān)的靜態(tài)特性和動態(tài)特性,以及影響吸合電壓的主要因素。通過對開關(guān)吸合電壓的分析,可以得出Saber系統(tǒng)分析法要比有限元法運算的速度快、效率高,因此Saber系統(tǒng)分析法是未來的發(fā)展趨勢。對于影響開關(guān)吸合電壓因素的分析可以得出,改變參數(shù)的不同結(jié)構(gòu)尺寸,對吸合電壓的影響是不同的。
[1] Yao J J.RF MEMS from a device perspective[J].Journal of Micomechanics and Microengineering,2000,10(4):R9-R38.
[2] Rebei G M.RF MEMS theory,design and technology[M].Hoboken,NJ:Wiley Interscience,2003.
[3] Santos H J D L.RF MEMS circuit design for wireless communications[M],Boston:Artech House,2002.
[4] Gabriel M Rebeiz.RE MEMS理論·設(shè)計·技術(shù),MEMS開關(guān)的電磁模型[M].南京:東南大學(xué)出版社,2005.
[5] 嚴(yán)春早,許高斌,葉劉曉.RF MEMS開關(guān)的發(fā)展現(xiàn)狀[J].微納電子技術(shù),2008,45(11):647-653.
[6] 有德義,任波,郝永平.并聯(lián)電容式RF MEMS開關(guān)的系統(tǒng)級設(shè)計與分析[J].儀表技術(shù)與傳感器,2014(4):1-3.
[7] ElataD,BambergerH.On the dynamic pull-in of electrostatic actuators with multiple degrees of freedom and multiple voltage sources[J].Journal of Microelectromechanical Systems,2006,15(1):131-140.
[8] Chowdhury S,Ahmadi M,Miller W C.Pull-in voltage study of electrostatically actuated fixed-fixed beams using a VLSI on-chip interconnect capacitance model[J].Journal of Micromechanical Systems,2006,15(3):639-651.
[9] PamidighantamS,PuersR,BaertK,etal.Pull-in voltage analysis of electrostatically actuated beam structures with fixed-fixed and fixed-free end conditions[J].Journal of Micromechanicsand Microengineering,2002,12(4):458-464.
[10] 賈盟軍.硅微機械加速度開關(guān)技術(shù)研究[D].北京:中國科學(xué)院大學(xué),2007.
[11] 周光亞.RF MEMS開關(guān)的可靠性研究[D].洛陽:河南科技大學(xué),2013.
猜你喜歡
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06