排土機俯仰液壓系統的改進及仿真優化
2015-04-25 01:43:48肖艷軍付景海王亞旭關玉明
機床與液壓
2015年8期
肖艷軍,付景海,王亞旭,關玉明
(河北工業大學機械學院,天津300130)
排土機是一種大型高效的物料運輸設備。我國現在正處于工業化時期,重工業發展迅速,煤炭等固體能源和固體礦物資源的需求量在不斷擴大,排土機作為大型物料運輸機械受到越來越廣泛的應用。排土機主要由履帶行走機構、受料臂、配重臂、俯仰機構、排料臂等部分組成,見圖1。
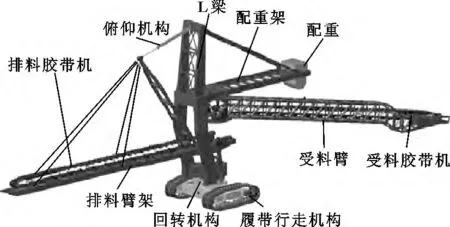
圖1 排土機組成
其中俯仰機構承受排料臂的重力,并通過俯仰液壓缸的伸縮實現排料臂的俯仰和物料的分層堆積。故對俯仰機構進行分析至關重要。排土機俯仰機構分為上部鋼絲繩起吊和下部液壓缸支撐兩種形式。為了保證受力平衡,下部液壓缸支撐形式通常是用兩個液壓缸支撐,需保證兩液壓缸同步,由于液壓缸密封性差異及受力不平衡等諸多原因導致液壓缸不同步,會造成液壓缸損害。而上部鋼絲繩起吊只有一個液壓缸,避免了不同步問題。排土機俯仰機構通常采用上部鋼絲繩起吊。此處要分析排土機俯仰結構為上部鋼絲繩起吊形式。
1 排土機俯仰液壓系統設計及AMESim 仿真
1.1 排土機液壓系統設計
排土機俯仰部分由機械系統和液壓系統組成。機械系統包括俯仰液壓缸、排料臂和作為連結的鋼絲繩。其動作主要是通過俯仰液壓缸伸縮,由鋼絲繩帶動排料臂升降。由設計要求可知,此設計中是通過液壓缸伸縮來實現懸臂的頻繁間歇上下運動,并要保證懸臂在某一位置能夠保持不動,即不能因懸臂重力使之自由下降。……
登錄APP查看全文
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
