低成本SINS/GPS組合導航系統的研究*
2015-05-05 06:35:58張文孫瑞勝
現代防御技術 2015年3期
張文,孫瑞勝
(南京理工大學 a.泰州科技學院,江蘇 泰州 225300; b.動力工程學院,江蘇 南京 210094)

低成本SINS/GPS組合導航系統的研究*
張文a,孫瑞勝b
(南京理工大學 a.泰州科技學院,江蘇 泰州 225300; b.動力工程學院,江蘇 南京 210094)
以簡易制導航彈為對象,進行了低成本組合導航系統的研究。慣性導航系統具有體積小,功耗低等特點,但定位誤差隨時間積累,所以長期穩定性比較差。目前應用最多的衛星導航是美國的GPS,GPS具有良好的長期穩定性,但使用受制于美國政府,而且它的動態定位性能比較差以及更新率比較低。將兩者結合起來,建立了適合工程應用的低成本SINS/GPS組合導航系統,應用自適應卡爾曼濾波技術實現數據的融合,并對系統進行了動態跑車試驗,試驗結果表明,該組合導航系統提高了導航精度。此方案具有較好的工程應用價值。
捷聯慣性導航系統;全球定位系統;組合導航系統;卡爾曼濾波
0 引言
為了使得飛行器按照指定的軌道運行,現在有多種導航設備可供使用,如慣性導航系統(inertial navigation system,INS),全球定位系統(global positioning system,GPS),北斗導航系統等。這些導航設備都具有各自的特點。慣性導航系統依靠自身的傳感器完成導航任務,具有價格低,功耗低,環境適應能力強等優點,但是它的誤差隨時間積累,以致導航精度隨時間發散,在需要長時間定位的時候,不能夠滿足導航的要求。以GPS為代表的衛星定位系統則沒有這個問題,具有很好的定位精度。但是,其抗干擾能力較差。如果將慣性導航系統與衛星定位系統相結合,兩者取長補短,可以提高導航系統的長期精度,降低成本。目前,SINS(strapdown INS)/GPS組合導航是導航領域研究的熱點,本文設計了一種適合于工程應用的低成本SINS/GPS組合導航系統。并對該系統的導航定位性能進行了實驗測試。
1 組合導航原理
1.1 SINS/GPS組合導航原理
捷聯慣導是將敏感器件安裝在載體上,利用陀螺儀測量載體的角速率,計算出姿態矩陣,確定載體的姿態和航向信息。特點是成本低,自主性和實時性好,但導航定位的誤差會隨時間推移而增長,難以長期獨立工作。另一方面, 對一般慣性導航系統而言, 加溫和初始對準也需要一定的時間。在這種情況下, 遠距離、高精度的導航和其他特定條件下的快速反應等性能要求, 就成了慣導系統比較難解決的問題。因而純慣導系統對陀螺儀有很高的要求,一般情況下,陀螺具有0.002~0.01(°)/h的精度才能夠完成導航任務,所以純慣導系統的成本很高[1]。GPS衛星提供的導航電文可以實時提供載體的位置、運動速度等導航信息,具有精度高,成本低的優點,但其抗干擾能力差以及更新率比較低,利用GPS測量出來的位置、速度信息與慣導系統測量的載體的位置、速度信息的差值作為量測值,并以此對慣導系統的誤差進行修正,將兩者進行結合,相互取長補短,可以使綜合后的系統導航精度高于2個系統單獨工作的精度[2]。國內一些研究單位都對組合導航系統展開了大量有針對性的研究工作,并取得一定成果,如:北京航天時代光電科技有限公司針對某型無人機的應用特點,利用低成本硅微MEMS陀螺儀與加速度計以及GPS信號實現了導航定位功能,組合定位誤差小于15 m,速度誤差小于0.6 m/s[2]。文獻[3]中介紹的組合導航系統在靜態條件下, 位置精度可達到5 m( 標準差) , 速度精度優于0.1 m/s。
導航原理如圖1所示。
1.2 組合導航系統模型
本文結合彈載導航系統的整體精度要求,在滿足導航精度的前提下,提出了一個適合于工程應用的簡化模型[4]。選取了簡單的位置、速度組合模式,組合系統的數學模型分為2部分:一是系統狀態方程,其狀態量為慣導系統的誤差,包括導航信息誤差和慣性器件誤差,共18個狀態量;二是系統的量測方程,利用GPS和SINS給出的位置,速度差作為量測值[5-6]。組合導航系統的狀態方程:
(1)
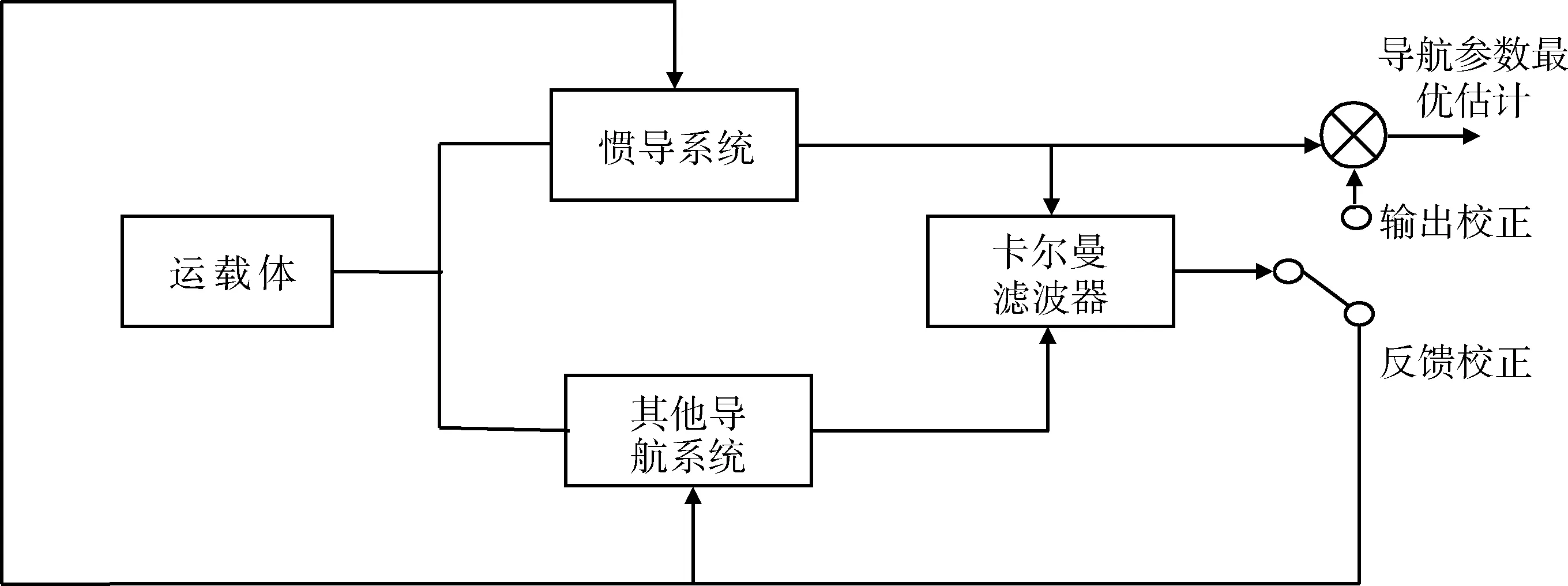
圖1 卡爾曼組合導航原理圖Fig.1 Principle of the Kalman integrated navigation
XI=(φe,φn,φu,δve,δvn,δvu,δφ,δλ,δh,εbx,εby,εbz,εrx,εry,εrz,▽ax,▽ay,▽az),
式中:φe,φn,φu為慣導系統的3個失準角;δve,δvn,δvu為東向、北向、天向的速度誤差;δφ,δλ,δh為緯度、經度、高度的誤差;εbx,εby,εbz為陀螺儀三維方向的常值漂移;εrx,εry,εrz為一階馬爾可夫過程漂移;▽ax,▽av,▽az為加速度計在三維方向的一階馬爾可夫過程漂移。
采用位置、速度組合時,有2組觀測值,一組是位置觀測值,即慣導系統給出的經緯度和高度信息與GPS給出的相應信息的差值,而慣導系統和GPS給出的位置差值作為另一組觀測值[7]。慣導和GPS的位置信息可分別表示為
(2)
式中:RM是地球參考橢球子午圈上各點的曲率半徑;RN是地球參考橢球卯酉圈上各點的曲率半徑;λt,φt,ht分別為經度,緯度和高度值;NE,NN,NU為GPS接收機沿東、北、天方向的位置誤差,作白噪聲處理。
速度信息可分別表示為
(3)
式中:ME,MN,MU分別對應GPS接收機沿東、北、天方向的測速誤差,同樣作白噪聲處理。則慣導系統的位置及速度信息與GPS位置及速度信息的差值為
定義系統的量測方程為
H(t)X(t)+N(t),
(4)
式中:
N(t)=(NN,NE,NU,ME,MN,MU)T.
2 Kalman濾波方程[8-11]
將系統的狀態方程和量測方程進行離散化,得下列公式:

(5)
Kalman濾波方程為
(6)
(7)
(8)
(9)
(10)
3 擴展卡爾曼濾波
卡爾曼濾波針對的是線性系統,可以對目標作出最優的估計,而實際生活應用中,大部分的對象都是非線性的,針對非線性系統對卡爾曼濾波進行了改進即擴展卡爾曼濾波(extended Kalman filter,EKF),將非線性函數的局部進行線性化,然后再進行卡爾曼濾波,完成濾波跟蹤[12-13]。假設系統的狀態空間方程如下:
X(k)=f(X(k))+W(k-1),
(11)
Y(k)=h(X(k))+V(k).
(12)
將式(11),(12)作一階Taylor級數展開并略去二次以上項,得到線性化的方程,
(13)

(14)

(15)
狀態誤差協方差矩陣為
(16)
EKF的濾波方程為

(17)
(18)
(19)

(20)
設定狀態向量和估計誤差矩陣的初始值X(0)和P(0),就可以利用EKF的濾波方程進行狀態估計。本系統將Kalman濾波和EKF這2種算法都進行了測試并進行了比較。
4 試驗結果及分析
設置系統的參數及初始條件,陀螺白噪聲漂移為50 (°)/h,陀螺一階馬爾可夫漂移為10 (°)/h,加速度計一階馬爾可夫漂移為5 mg,相關時間3 600 s。水平位置誤差為10 m,高度誤差為20 m, 水平速度誤差為0.2 m/s,方位速度誤差為0.3 m/s,經緯度誤差為0.001°,高度誤差為10 m,速度誤差為0.5 m/s。
軟件編制和系統調試之后,選取了下面一段路線,對該組合導航系統進行跑車驗證,為比較2種算法, 取了4個點進行了比較, 得到的曲線分別如圖2,3所示。
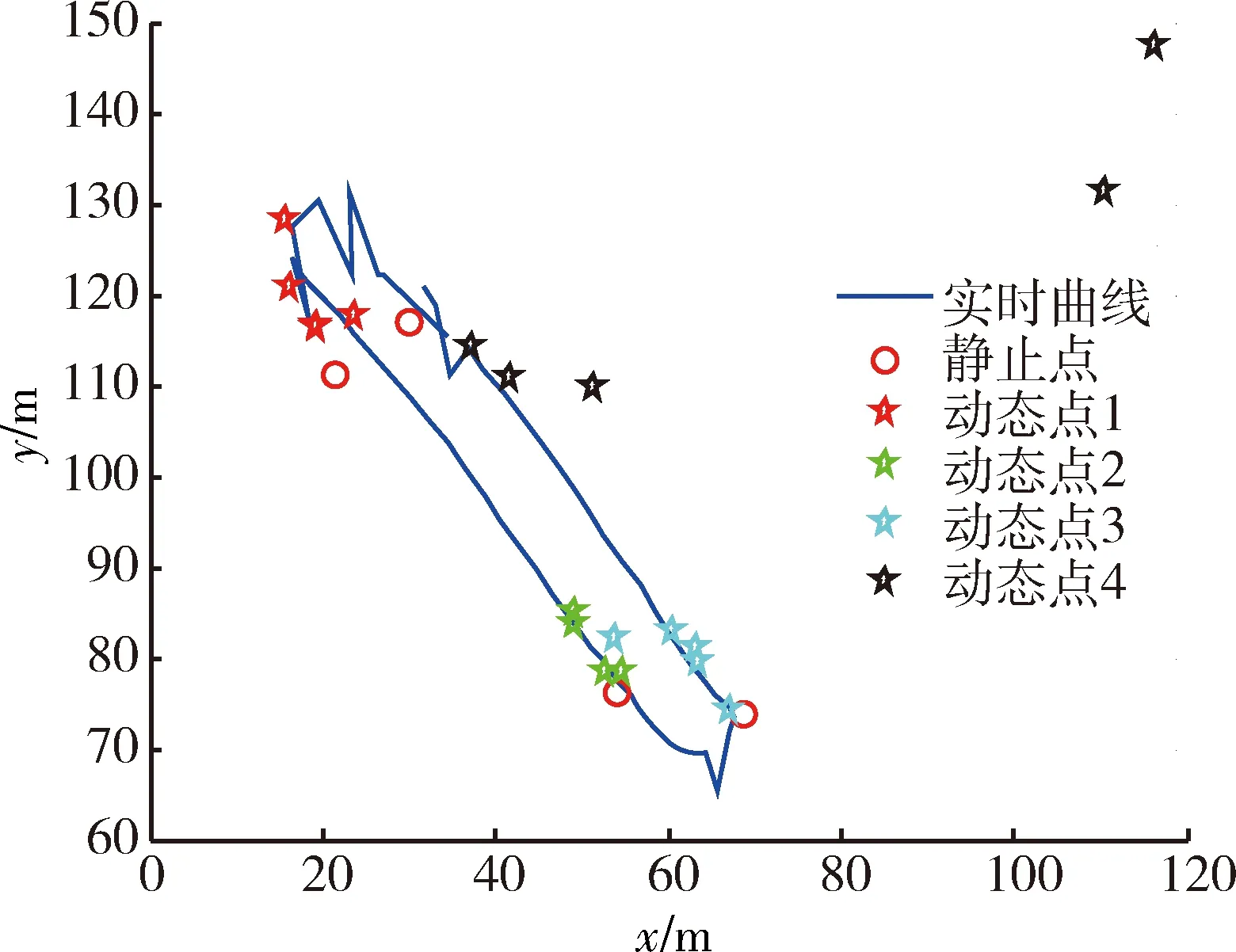
圖2 組合導航系統航跡圖及測試點(KF方法)Fig.2 Track of integrated navigation system and test points (method of KF)
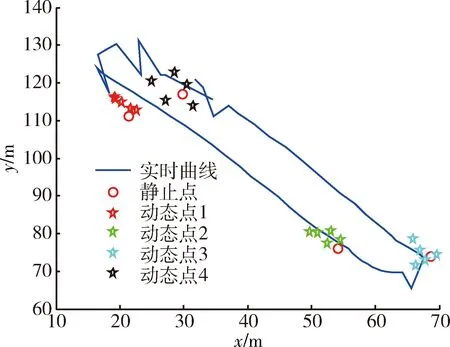
圖3 組合導航系統航跡圖及測試點(EKF方法)Fig.3 Track of integrated navigation system and test points (method of EKF)
從繪制曲線上可以看出,采用KF濾波精度要低于采用EKF。同時,KF在點4上還出現了發散的情況,這種發散點的產生是隨機的,不能用于導航。在進行數據分析時,不應該包含這些發散的點。將這些不合理的數據剔除后對測量數據進行了誤差分析計算,表1,2分別是采用2種濾波方法在緯度和精度方向上所產生的平均誤差,可以看出采用EKF濾波的時候精度要明顯高于KF。
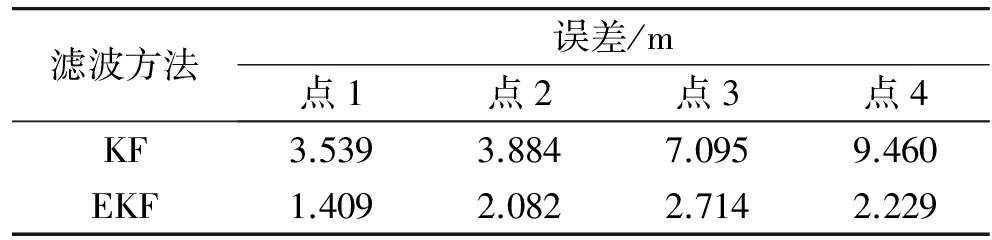
表1 緯度誤差Table 1 Longitude error
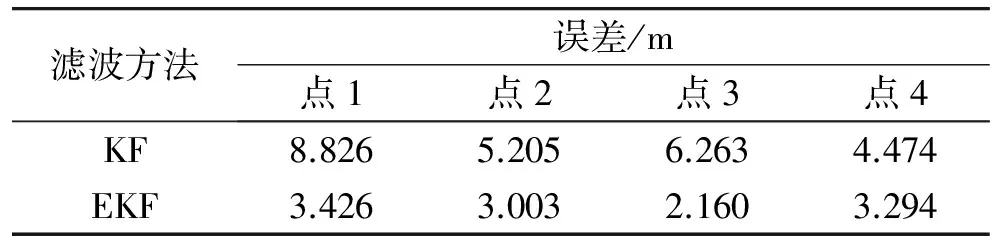
表2 經度誤差Table 2 Latitude error
5 結束語
本文針對工程應用中的SINS/GPS組合導航系統進行了研究,建立了一種適合于工程應用的導航計算模型。同時,采用自適應卡爾曼濾波器的改進算法擴展卡爾曼濾波對誤差進行了估計,有效克服了純慣導系統誤差發散的現象,提高了系統的導航精度。通過實驗結果表明, 此組合導航系統性能穩定,具有良好的重復性和穩定性。所建立的模型能夠滿足工程實際的使用要求。
[1] 蔣慶仙.關于MEMS慣性傳感器的發展及在組合導航中的應用前景[J]. 測繪通報,2006(9):5-8. JIANG Qing-xian. The Development of the MEMS Inertial Sensor and Its Application Perspective in Integrated Navigation [J]. Bulletin of Surveying and Mapping, 2006(9):5-8.
[2] 蔡春龍,劉翼,劉一薇.MEMS儀表慣性組合導航系統發展現狀與趨勢[J]. 中國慣性技術學報,2009,17(10):562-567. CAI Chun-long, LIU Yi, LIU Yi-wei. Status Quo and Trend of Inertial Integrated Navigation System Based on MEMS [J]. Journal of Chinese Inertial Technology, 2009,17(10):562-567.
[3] 唐康華,吳美平,胡小平.基于自適應濾波器的MIMU/ GPS組合系統的研究[J].壓電與聲光,2007,29(4):398-401. TANG Kang-hua, WU Mei-ping, HU Xiao-ping. Study on MIMU/GPS Integrated Navigation System Based on Adaptive Kalman Filter[J]. Piezoelectrics and Acoustooptics,2007,29(4):398-401.
[4] 于潔,王新龍.SINS/GPS緊密組合導航系統仿真研究[J].航空兵器,2008(6):8-13. YU Jie, WANG Xin-long. Simulation of SINS/GPS Tightly Coupled Integrated Navigation System[J].Aero Weaponry,2008(6):8-13.
[5] QI Hong-hui,MOORE J B. Direct Kalman Filtering Approach for GPS/INS Integration Aerospace and Electronic Systems[J]. IEEE Transactions on Aerospace and Electronic Systems,2002,38(2):687-693.
[6] 曾洪貴,羅大成,王明福.一種SINS/CNS緊耦合組合導航信息融合方法[J].現代防御技術,2009,37(4):35-37. ZENG Hong-gui,LUO Da-cheng,WANG Ming-fu .Performance Analysis of a New Tightly Coupled SINS/CNS Integration. [J].Modern Defence Technology ,2009,37(4):35-37.
[7] 吳平,雷虎民,劉代軍,等. 基于UKF算法的SINS/GPS全組合導航系統研究 [J].現代防御技術,2010,38(4):47-52. WU Ping, LEI Hu-ming, LIU Dai-jun,et al. Fully Integrated SINS/GPS Navigation System Based on Unscented Kalman Filter Algorithm[J].Modern Defence Technology ,2010,38(4):47-52.
[8] 秦永元,張洪鋮,汪叔華.卡爾曼濾波與組合導航原理[M].西安:西北工業大學出版社,1998. QIN Yong-yuan,ZHANG Hong-cheng,WANG Shu-hua.Kalman Filtering and Integrated Navigation Principle[M].Xi’an:Northwestern Polytechnical University Press,1998.
[9] 馬云峰.MSINS/GPS組合導航系統及其數據融合技術研究[D].南京:東南大學,2006. MA Yun-feng.Research on MSINS/GPS Integrated Navigation System and Its Fusion Technology[D].Nanjing:Southeast University,2006.
[10] 高社生,周濤,趙忠.卡爾曼濾波直接法在INS/GPS組合導航系統中的應用[J].彈箭與制導學報.2002,22(1):28-30. GAO She-sheng,ZHOU Tao, ZHAO Zhong.The Application of Kalman Direct Filtering in INS/GPS Integrated Navigation System[J].Journal of Projectiles Rockets Missiles an Guidance,2002,22(1):28-30.
[11] 黃麗斌,周百令.低成本MINS/GPS組合導航中Kalman濾波算法的綜合應用研究[J].中國慣性技術學報,2005,13(5):16-19. HUANG Li-bin,ZHOU Bai-ling. Synthetical Application on Kalman Filtering Algorithms of Low Cost MINS/GPS Navigation System[J]. Journal of Chinese Inertial Technology,2005,13(5):16-19.
[12] 范煒,李勇. 近似二階擴展卡爾曼濾波方法研究[J].空間控制技術與應用,2009,35(1):30-35. FAN Wei, LI Yong. A Method of Approximate Second-Order Extended Kalman Filter[J]. Aerospace Control and Application , 2009,35(1):30-35.
[13] 鄒衛軍,薄煜明. 差分線性化EKF 濾波方法研究[J].計算機工程與應用,2009,45(9):64-66. ZOU Wei-jun,BO Yu-ming. A Research of EKF Based on Differential Linearization [J]. Computer Engineering and Applications , 2009,45(9):64-66.
Low-Cost SINS/GPS Integrated Navigation System
ZHANG Wena,SUN Rui-shengb
(Nanjing University of Science and Technology, a.Taizhou Institude,Jiangsu Taizhou 225300,China; b.School of Power Engineering,Jiangsu Nanjing 210094, China)
Taking the navigation system of the low cost guided missile project as the research object, the low cost integrated navigation system is investigated. The inertial navigation system features small size, low power and so on. But its long-term stability is poor because of position error accumulating with the growing time. Now the most widely used satellite navigation is the global navigation satellite system. Long-term accuracy of GPS (global positioning system) is good but is subject to the American government. Its dynamic positioning performance is poor and the rate of updating is low. SINS (strapdown inertial navigation system)/GPS integrated navigation system is made by using the advantages of two systems, which is suitable for engineering application. The integrated navigation is implemented by adopting Kalman filtering algorithm. In the end, the result of the vehicle experiment indicates that the scheme can improve the precision of the navigation system and has high engineering practice.
strapdown inertial navigation system(SINS); global positioning system(GPS);integrated navigation system;Kalman filter
2013-11-30;
2014-07-05
國家自然科學基金項目(11176012)
張文(1982-),女, 江蘇泰州人。講師,碩士,主要從事組合導航,嵌入式系統等方面的研究。
通信地址:225300 江蘇省泰州市梅蘭東路8#南京理工大學泰州科技學院 E-mail:18814219@qq.com
10.3969/j.issn.1009-086x.2015.03.011
V249.32+8;P228.4
A
1009-086X(2015)-03-0060-05
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28