減少設(shè)備動作次數(shù)的無功優(yōu)化新方法
2015-05-06 07:45:10孫守鑫孟慶江劉小春
江西電力 2015年4期
孫守鑫,張 超,孟慶江,王 林,劉小春
(1、國網(wǎng)山東濰坊供電公司,山東 濰坊 261000;2、國網(wǎng)江西省電力公司經(jīng)濟(jì)技術(shù)研究院,江西 南昌 330043)
0 引言
電力系統(tǒng)無功優(yōu)化是指從電力系統(tǒng)經(jīng)濟(jì)優(yōu)化運行的角度,調(diào)整系統(tǒng)中各種無功控制設(shè)備,在滿足節(jié)點正常功率平衡及各種安全指標(biāo)的約束下,實現(xiàn)目標(biāo)函數(shù)最小化。
傳統(tǒng)的無功優(yōu)化很少考慮到實際中的一些問題,如變壓器的分接頭的變動和并聯(lián)無功補償器等設(shè)備的投切次數(shù)。通過調(diào)研發(fā)現(xiàn),實際運行中很少變動變壓器的分接頭,而主要靠投切無功補償裝置來調(diào)節(jié)無功。
從經(jīng)濟(jì)性角度分析,變壓器分接頭的調(diào)節(jié)以及其他無功設(shè)備的每次的調(diào)節(jié)和投切都將帶來一定的經(jīng)濟(jì)損耗。從安全性角度分析,頻繁的調(diào)節(jié)變壓器分接頭,容易產(chǎn)生滑檔,引起電網(wǎng)運行的事故。
考慮到實際當(dāng)中的問題,本文建立的新方法分兩步求解無功優(yōu)化,在傳統(tǒng)的無功優(yōu)化基礎(chǔ)上考慮了變壓器分接頭的調(diào)節(jié)以及其他無功補償設(shè)備的投切次數(shù)的約束。以負(fù)荷曲線的分段為基礎(chǔ),采用粒子群算法,并以IEEE30節(jié)點系統(tǒng)為例,證明了方法的有效性和可靠性,有實際應(yīng)用價值。
1 傳統(tǒng)電力系統(tǒng)無功優(yōu)化
1.1 目標(biāo)函數(shù)
目標(biāo)函數(shù)(系統(tǒng)網(wǎng)損最小):

1.2 約束方程
1)功率約束方程:
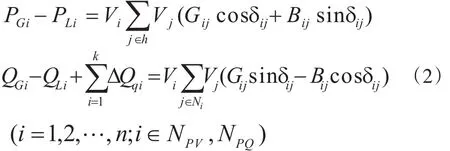
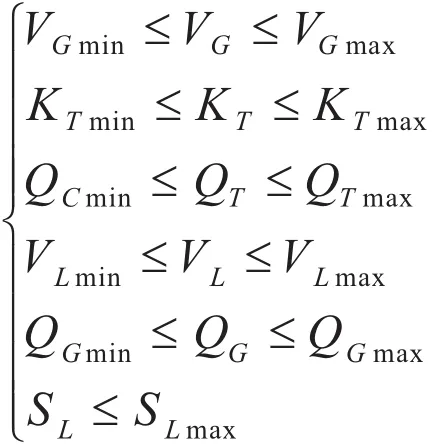
2)不等式約束:
2 無功優(yōu)化新方法
通過現(xiàn)場調(diào)研,實際中往往很少調(diào)節(jié)變壓器分接頭,而是通過投切無功補償裝置來調(diào)節(jié)無功。考慮到實際應(yīng)用情況本文提出了分兩步的無功優(yōu)化新方法。
2.1 具體步驟
首先,根據(jù)負(fù)荷曲線將一天的時間劃分成段。劃分的原則是段與段間的極差和標(biāo)準(zhǔn)差有較大變化,而段內(nèi)的極差和標(biāo)準(zhǔn)差則變化較小。IEEE-30節(jié)點系統(tǒng)的日負(fù)荷曲線:

圖1 日負(fù)荷曲線
表1為分段的結(jié)果:

表1 分段結(jié)果
第一步應(yīng)用傳統(tǒng)的無功優(yōu)化方法,在上面所分的時間段內(nèi)由均值計算出無功優(yōu)化最優(yōu)解,求得各個時間段的系統(tǒng)變壓器分接頭的位置,分別記為。
第二步是在原有的控制變量和狀態(tài)變量約束外,還要加上除變壓器外的無功補償設(shè)備投切次數(shù)的限制,即

2.2 粒子群算法
由m個粒子組成一個粒子群體,群體中每個粒子都以一定的速度移動,運動方向由兩點決定:一是粒子自身移動的最好位置Pbest,二是粒子群的最好位置Gbest。其速度和位置更新公式為:
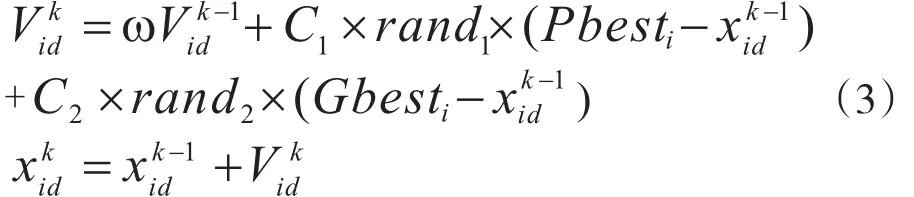
式中,i=1,…,m;d=1,2,…,n其中m為粒子群中粒子的個數(shù);n是解向量的維數(shù)。C1和C2為大于零的學(xué)習(xí)因子,分別表示兩個優(yōu)化解得權(quán)重;w是慣性權(quán)重系數(shù)。
2.3 流程圖
無功優(yōu)化新方法流程見圖2。
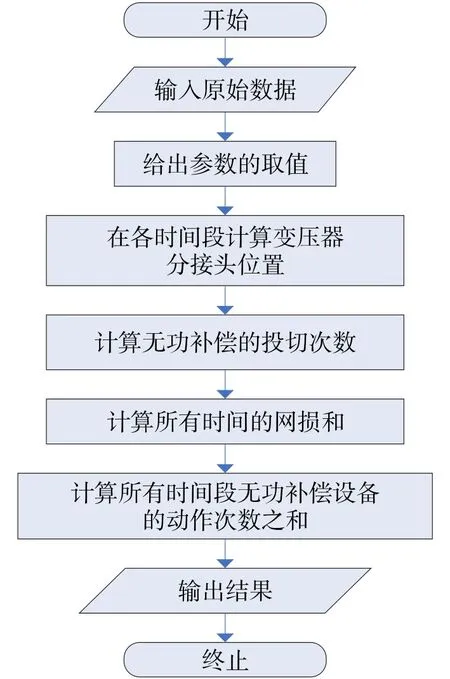
圖2 無功優(yōu)化新方法流程圖
3 算例驗證
為驗證新方法的優(yōu)越性和實際性,對IEEE-30節(jié)點實際系統(tǒng)進(jìn)行仿真計算。采用算例系統(tǒng)的參數(shù)均為標(biāo)幺值,電壓相角單位是弧度,基準(zhǔn)功率為100MVA。用MATLAB7.1編程實現(xiàn)優(yōu)化計算程序。
IEEE-30節(jié)點系統(tǒng)包括6臺發(fā)電機(節(jié)電1、2、5、8、11、13,其中1節(jié)點為平衡節(jié)點,2、5、8、11、13為PV節(jié)點)、21條負(fù)荷母線及41條支路,有4臺可調(diào)變壓器分布在支路(6-9、6-10、4-12、27-28);有2個并聯(lián)無功補償裝置補償點(節(jié)點10、24)。最大迭代次數(shù)100,計算結(jié)果如表2:

表2 分時段無功優(yōu)化后網(wǎng)損值
從表2可以看到,分段計算的無功網(wǎng)損要比應(yīng)用原始方式計算的無功網(wǎng)損有明顯的減少。雖然無功補償裝置的動作次數(shù)減少了,但優(yōu)化的結(jié)果卻得到了改善。
由表3可以看出,新方法比傳統(tǒng)無功優(yōu)化方法在變壓器分接頭動作方面有明顯的改善,平均少動作了6.5次。

表3 變壓器動作次數(shù)比較
由表4可以看到,新方法中,并聯(lián)無功補償器的平均動作次數(shù)是12.5次,比傳統(tǒng)無功優(yōu)化方法中并聯(lián)無功補償器的平均動作16次少3.5次。由于將時間分段,在每段時間內(nèi)變壓器為定值不動作,所以,每個變壓器的動作次數(shù)最多不超過3次,使動作次數(shù)有明顯減少。

表4 無功補償器的投切次數(shù)
從圖3可以看出在電壓方面?zhèn)鹘y(tǒng)無功優(yōu)化方法各節(jié)點電壓的波動范圍較大,新的無功優(yōu)化方法節(jié)點的電壓都穩(wěn)定在1.0附近,使得電壓質(zhì)量明顯的改善。有利于電壓的穩(wěn)定及電能質(zhì)量的提高并降低網(wǎng)損。

圖 3新方法和傳統(tǒng)方法無功優(yōu)化后電壓變化
4 結(jié)論
基于對實際中主要應(yīng)用調(diào)節(jié)并聯(lián)無功補償裝置來調(diào)節(jié)無功,本文提出了考慮無功設(shè)備的投切次數(shù)限制的兩步無功優(yōu)化新方法,減少了變壓器分接頭的調(diào)節(jié)次數(shù)。由算例可以看出,本方法有效的減少了設(shè)備的動作次數(shù),與傳統(tǒng)無功優(yōu)化方法對比,得到了較好的結(jié)果。
[1]劉明波,朱春明,錢康齡,等.計及控制設(shè)備動作次數(shù)約束的動態(tài)無功優(yōu)化算法.中國電機工程學(xué)報,2004,24(3):34-40.
[2]別朝紅,周婷,王錫凡,電力系統(tǒng)多時段無功優(yōu)化研究[J],西安交通大學(xué)學(xué)報,2008,42(6).
[3]李林川,李俊元,武文杰.考慮變壓器分接頭動作次數(shù)限制的綜合無功優(yōu)化[J].中國電力,2005,30(2).
[4]陳建華,李先允,鄧東華,等.粒子群優(yōu)化算法在電力系統(tǒng)中的應(yīng)用綜述[J].繼電器,2007,35(23)
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
通信電源技術(shù)(2018年3期)2018-06-26 06:33:30
小學(xué)生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
現(xiàn)代工業(yè)經(jīng)濟(jì)和信息化(2016年4期)2016-05-17 05:35:38