PLC和GE369在同步機電控系統(tǒng)中的應(yīng)用
2015-05-25 06:09:58冉祥濤
電氣技術(shù) 2015年5期
冉祥濤
(中冶集團資源開發(fā)有限公司,北京 100000)
球磨機在銅礦的生產(chǎn)過程中至關(guān)重要,驅(qū)動筒體的同步機的平穩(wěn)運行直接關(guān)系到球磨系統(tǒng)的正常運行,其重要性不言而喻。中冶集團位于巴基斯坦的山達克項目位于該國西北部,其選礦廠的三臺球磨機都是采用美國通用公司生產(chǎn)的型號為TS39857的無刷勵磁同步機,額定電壓為6000V,額定功率為3028kW。在同步機的起動和運行過程中,因為需要檢測和保護的參數(shù)較多,所以采用了繼電器+接觸器+大量的參數(shù)采集和保護設(shè)備,可靠性較差、控制精度低、接線復(fù)雜、故障率高,隨著計算機控制技術(shù)的發(fā)展,特別是新技術(shù)新設(shè)備的不斷出現(xiàn),傳統(tǒng)的這種電控系統(tǒng)已經(jīng)不適應(yīng)當(dāng)今的生產(chǎn),嚴重的影響了產(chǎn)量和效益。
GE369 是美國通用公司生產(chǎn)的一款電動機保護控制設(shè)備,應(yīng)用在同步機電控系統(tǒng)中,具有先進的保護特性如反轉(zhuǎn)檢測,先進的熱模型如定子熱檢測的多RTD 輸入;具有完整的設(shè)備監(jiān)視功能,如繞組溫度、有功和無功、電流電壓、功率因數(shù)、加速時間等;具有模擬示波器的功能,監(jiān)測功率因數(shù)以及電流電壓的變化情況,縮短故障排除時間并降低維護成本。
1 系統(tǒng)的組成
如圖1所示為系統(tǒng)的結(jié)構(gòu)框圖,系統(tǒng)主要有工控機、PLC、交換機、GE369 以及傳感器組成。其中,上位機中使用Wincc 組態(tài)軟件監(jiān)控整個系統(tǒng)的運行,控制器PLC 采用西門子S7-200 和S7-300。 為避免出現(xiàn)一臺球磨機故障停機對其他兩臺造成影響,分別采用三組S7-300 和GE369 來分別監(jiān)測和控制三臺同步機的運行。
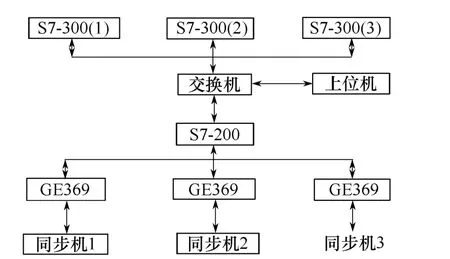
圖1 系統(tǒng)的結(jié)構(gòu)框圖
采用PLC 與工控機相結(jié)合,構(gòu)成上下位機控制系統(tǒng),使系統(tǒng)既能及時采集、存儲數(shù)據(jù),又可處理和使用數(shù)據(jù),并直觀地顯示出來,從而實現(xiàn)工業(yè)生產(chǎn)過程的實時監(jiān)控。
GE369 在系統(tǒng)中的功能是負責(zé)采集同步機的各項起動和運行參數(shù)、檢測到參數(shù)異常時保護跳閘、與S7-200 進行通信。通過與S7-200 之間的通信將三臺GE369 的監(jiān)測和控制參數(shù)匯總,傳遞給S7-300,然后進行各種邏輯運算,將最終運算結(jié)果輸送給執(zhí)行機構(gòu)(同步機斷路器手車、起動球磨機筒體的離合器、勵磁調(diào)節(jié)等),同時通過與上位機之間的通信來對各項參數(shù)進行監(jiān)測和控制。S7-200 在與S7-300通信時作為從站運行,在與GE369 通信時作為主站運行。所以在系統(tǒng)的通信中,S7-200 既做主站又做從站,系統(tǒng)的網(wǎng)絡(luò)結(jié)構(gòu)如圖2所示。
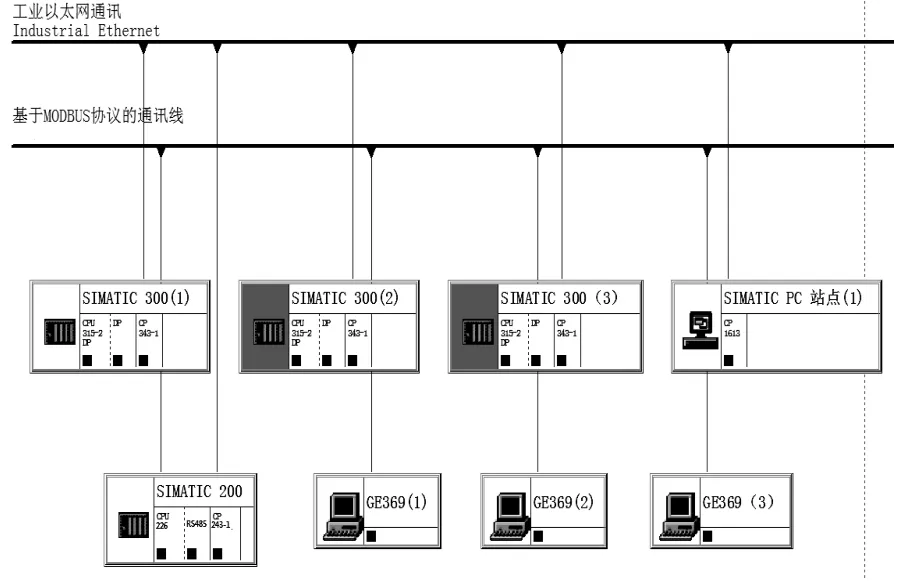
圖2 系統(tǒng)的網(wǎng)絡(luò)結(jié)構(gòu)圖
2 系統(tǒng)的通信及程序設(shè)計
系統(tǒng)的核心控制邏輯是通過PLC 來實現(xiàn)的。通信及軟件部分主要分為兩部分,基于MODBUS 協(xié)議的S7-200 與GE369 之間的通信和程序,基于工業(yè)以太網(wǎng)的S7-200 與S7-300 之間的通信和程序。為了能對系統(tǒng)進行全面可靠的控制,同時考慮到系統(tǒng)的靈活性、方便性、可靠性和易維護性等因素,通過上位機組態(tài)軟件Wincc 對系統(tǒng)進行全方位的監(jiān)測和控制。
2.1 S7-200 與GE369 之間的通信
GE369 有兩個通信接口,RS232 接口和RS485接口,RS232 接口在本系統(tǒng)中主要用于與電腦的連接,通過電腦簡單直觀的設(shè)置同步機的各項保護參數(shù),RS485 接口主要用于和S7-200 之間的通信。S7-200 和GE369 保護器的RS485 接口都支持基于MODBUS 的通信協(xié)議,本系統(tǒng)中用一臺S7-200 同時和三臺GE369 保護器進行通信,S7-200 最多可以與247 個從站同時通信。通過與GE369 的通信,將同步機的各項參數(shù)傳遞給S7-200,并將各控制參數(shù)傳輸給GE369。從而實現(xiàn)對同步機各項參數(shù)的采集和對同步機的各項控制功能。
2.2 S7-200 與S7-300 以及上位機之間的通信
S7-200 通過GE369 采集到同步機的各項參數(shù)之后,作為從站通過交換機與S7-300 之間進行基于工業(yè)以太網(wǎng)的通信,這時只對作為從站的S7-200 進行相關(guān)配置和程序設(shè)計即可,而作為主站的S7-300 則只需要對接受到的數(shù)據(jù)進行邏輯運算和轉(zhuǎn)化,以浮點數(shù)的形式傳送給上位機監(jiān)控軟件Wincc,同時接收上位機的各項控制指令傳送給執(zhí)行機構(gòu)和GE369保護器,從而實現(xiàn)通過Wincc 對同步機的監(jiān)測和控制。本系統(tǒng)中利用STEP7 編程軟件工具欄中Ethernet wizard(以太網(wǎng)向?qū)В7-200 進行相關(guān)配置。
2.3 程序設(shè)計
S7-200 與GE369 之間的通信利用STEP7 編程軟件進行程序設(shè)計。STEP7 編程軟件中有專門基于MODBUS 協(xié)議的庫函數(shù) MBUS_CTRL 和MBUS_MSG,前者是控制程序塊,后者是傳輸程序塊。通過對MBUS_CTRL 和MBUS_MSG 程序塊分別定義來完成GE369 和S7-200 之間的數(shù)據(jù)傳遞。從而實現(xiàn)S7-200 對同步機各項參數(shù)的采集和對同步機的各項控制功能。程序如圖3(因為傳輸數(shù)據(jù)塊較多,所以取部分數(shù)據(jù)塊說明)所示。程序中Network1 為定時中斷程序,用SM0.1 觸點導(dǎo)引能流來觸發(fā)使能,僅第一個掃描周期接通為ON,其他剩余的程序塊都由SM0.0 來觸發(fā)使能,SM0.0 為始終接通為ON。程序中設(shè)置中斷時間為150ms,即每隔150ms 觸發(fā)一次事件10,根據(jù)S7-200 自由口通信協(xié)議可知,事件10 為定時中斷,通過ATCH 中斷連接指令將INT0 和事件10 連接到一起,即每隔150ms 程序執(zhí)行一次INT0。因為需要和GE369 傳遞的數(shù)據(jù)較多,所以定義INT0 為一個計數(shù)子程序C30(計數(shù)程序在此不再贅述),計數(shù)子程序從0~30 不斷循環(huán),循環(huán)到數(shù)據(jù)傳輸程序塊中設(shè)置的相關(guān)數(shù)據(jù)時候觸發(fā)一次S7-200 到GE369 的數(shù)據(jù)請求,從站接收到數(shù)據(jù)請求時就會做出響應(yīng)并將請求的數(shù)據(jù)傳輸給PLC。數(shù)據(jù)傳送程序塊中Slave 為從站地址,可以通過設(shè)置來確定,Addr 為GE369 里參數(shù)的地址值,通過查詢手冊可得,RW 為讀寫設(shè)定,“0”為讀從站中的數(shù)據(jù),“1”為向從站中寫數(shù)據(jù),Count為傳輸?shù)臄?shù)據(jù)個數(shù),DatePtr 為接收到數(shù)據(jù)后存入S7-200 中的地址。
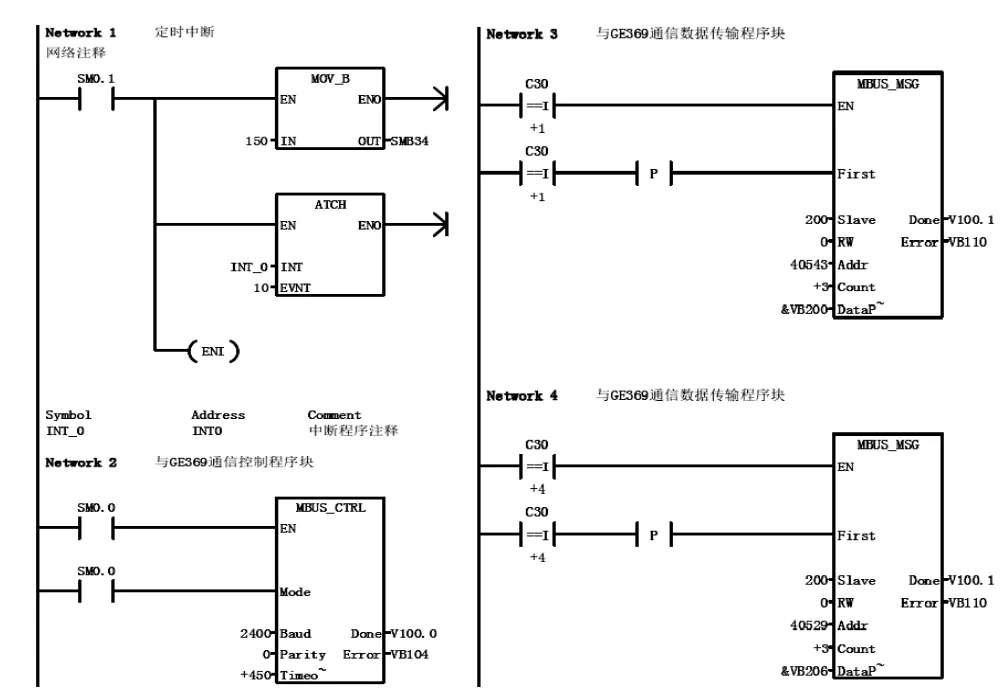
圖3 S7-200 與GE369 的通信程序
S7-200 與S7-300 通信時首先需要對S7-200 進行以太網(wǎng)通信配置,此時通過STEP7 中以太網(wǎng)向?qū)韺7-200 進行設(shè)置,參考S7-200 自由口通信資料,此處不贅述。設(shè)置好以后用STEP7 軟件編寫通信程序,如圖5所示,由常閉觸點SM0.0 觸發(fā)使能,數(shù)據(jù)交換時需要上升沿來觸發(fā),程序中用了SM0.5,在1s 的掃描周期內(nèi),SM0.5 接通為0.5s,關(guān)斷為0.5s。Network2 和Network3 程序中Chan~為數(shù)據(jù)連接名稱,指數(shù)據(jù)傳輸中作為從站還是主站進行數(shù)據(jù)交換,本程序中為從站。Data 為數(shù)據(jù)傳輸名稱,指數(shù)據(jù)傳輸中是向主機寫入數(shù)據(jù)還是讀取數(shù)據(jù),本程序即寫入數(shù)據(jù)又讀取數(shù)據(jù),所以需要兩個數(shù)據(jù)交換程序塊來完成,Network2 向 S7-300 主站寫入數(shù)據(jù),Network3 從S7-300 主站讀取數(shù)據(jù)。數(shù)據(jù)連接名稱和數(shù)據(jù)傳輸名稱都在工業(yè)以太網(wǎng)向?qū)е羞M行定義。

圖4 S7-200 與S7-300 的通信程序
2.4 WinCC 監(jiān)控畫面開發(fā)
在設(shè)計監(jiān)控界面時,畫面應(yīng)該簡潔美觀,操作簡單方便。盡可能將設(shè)備的各種監(jiān)視和操作信息集中在幾個主要畫面中,操作人員只需調(diào)用這些畫面便可進行相關(guān)監(jiān)測和控制。
本監(jiān)控系統(tǒng)的人機界面由主監(jiān)控畫面和子監(jiān)控畫面構(gòu)成,主畫面如圖5所示,通過監(jiān)測各球磨機運行時的功率、功率因數(shù)、有功無功、電壓電流等參數(shù),來實時反應(yīng)球磨機運行時的狀況,方便操作人員及時判斷球磨機是否處于正常運行狀態(tài)。主畫面還設(shè)置了勵磁調(diào)節(jié),失步報警等功能。
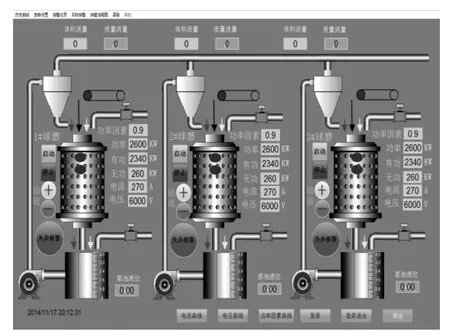
圖5 上位機Wincc 人機界面
在子監(jiān)控畫面中,電流曲線界面如圖6所示,電壓和功率因數(shù)曲線與之相似。通過監(jiān)控球磨機起動和運行時的電壓電流和功率因數(shù)曲線,可以觀察球磨機整個起動過程,如投勵前投勵后各參數(shù)的變化情況,從而判斷球磨機起動是否正常。尤其是起動出現(xiàn)故障造成同步機起動失敗時,能夠通過各曲線的形狀直觀快速的判斷起動失敗的原因,為故障的檢查和處理提供數(shù)據(jù)支持。
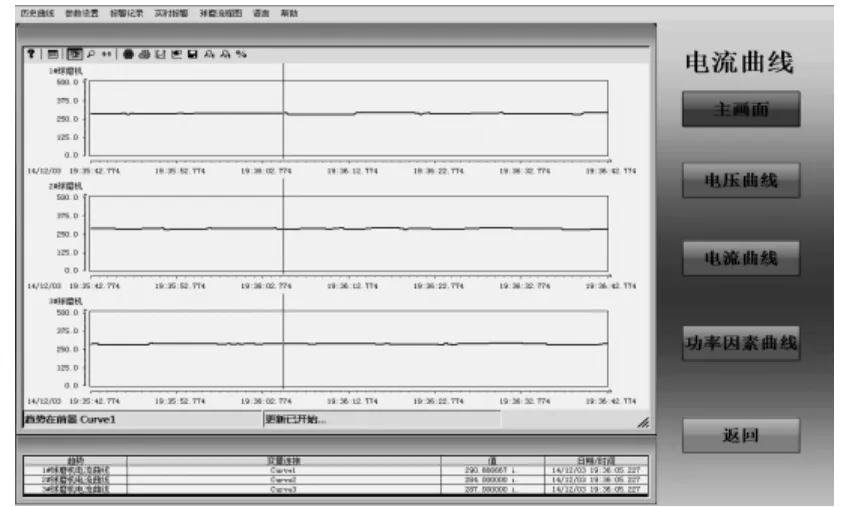
圖6 電流曲線
在本監(jiān)控系統(tǒng)中,除了電壓電流功率因數(shù)三個主要監(jiān)控畫面之外,還在工具欄中設(shè)置了歷史曲線、參數(shù)設(shè)置、報警記錄、實時報警和球磨機流程圖的子監(jiān)控畫面。
歷史曲線方便現(xiàn)場工作人員隨時查看各球磨機的電壓、電流、功率因數(shù)等歷史數(shù)據(jù),畫面類似于電流電壓曲線,此處不贅述;報警記錄畫面如圖7所示,當(dāng)溫度、過壓過流、功率因數(shù)報警時,自動記錄報警時的日期、時間、故障點、故障原因和持續(xù)時間等。
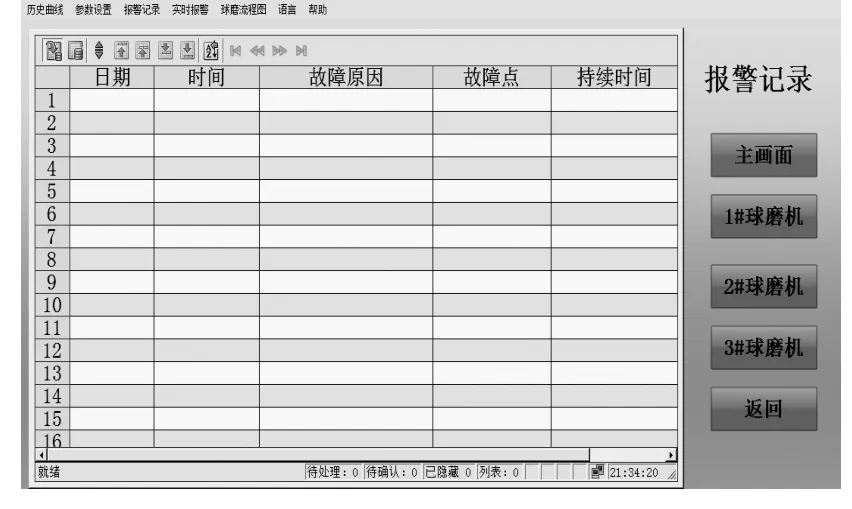
圖7 報警記錄信息
實時報警畫面如圖8所示,當(dāng)故障發(fā)生時,與之對應(yīng)的故障名稱由黑色變?yōu)榧t色,方便故障的診斷和處理。
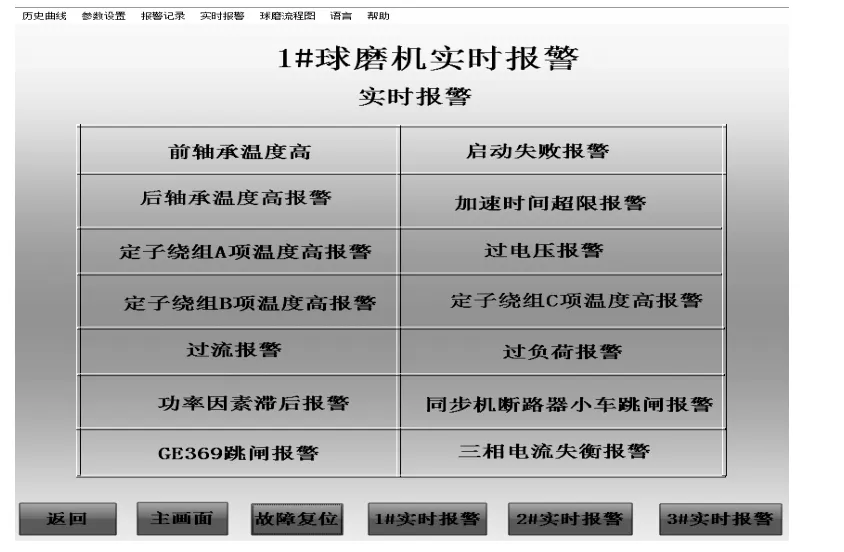
圖8 實時報警
參數(shù)設(shè)置如圖9,設(shè)置溫度、電流電壓、功率因數(shù)等報警限值,當(dāng)同步機運行時檢測到某項參數(shù)達到或超過設(shè)定的限制時,設(shè)備就會執(zhí)行報警或者跳閘。
球磨機流程圖如圖10 所示,方便操作人員熟悉整個球磨系統(tǒng)工作原理,不具備監(jiān)測和控制的功能。

圖9 參數(shù)設(shè)定
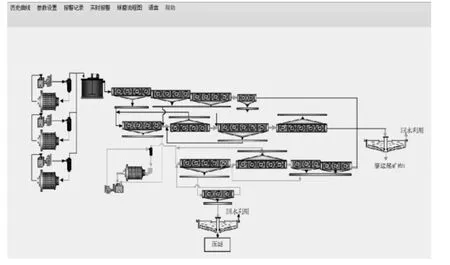
圖10 球磨機流程圖
3 新系統(tǒng)與傳統(tǒng)的電控系統(tǒng)的區(qū)別及其優(yōu)勢
傳統(tǒng)的同步機電控系統(tǒng)與基于PLC 和GE369組成的新系統(tǒng)區(qū)別見表1。
與繼電器加大量接觸器的電控系統(tǒng)相比,新系統(tǒng)有著傳統(tǒng)控制系統(tǒng)無法比擬的優(yōu)勢,除了表中所列出的各項之外,新系統(tǒng)的優(yōu)點還有很多,比如故障自診斷、能耗低、可根據(jù)需要隨時更改保護參數(shù)等。
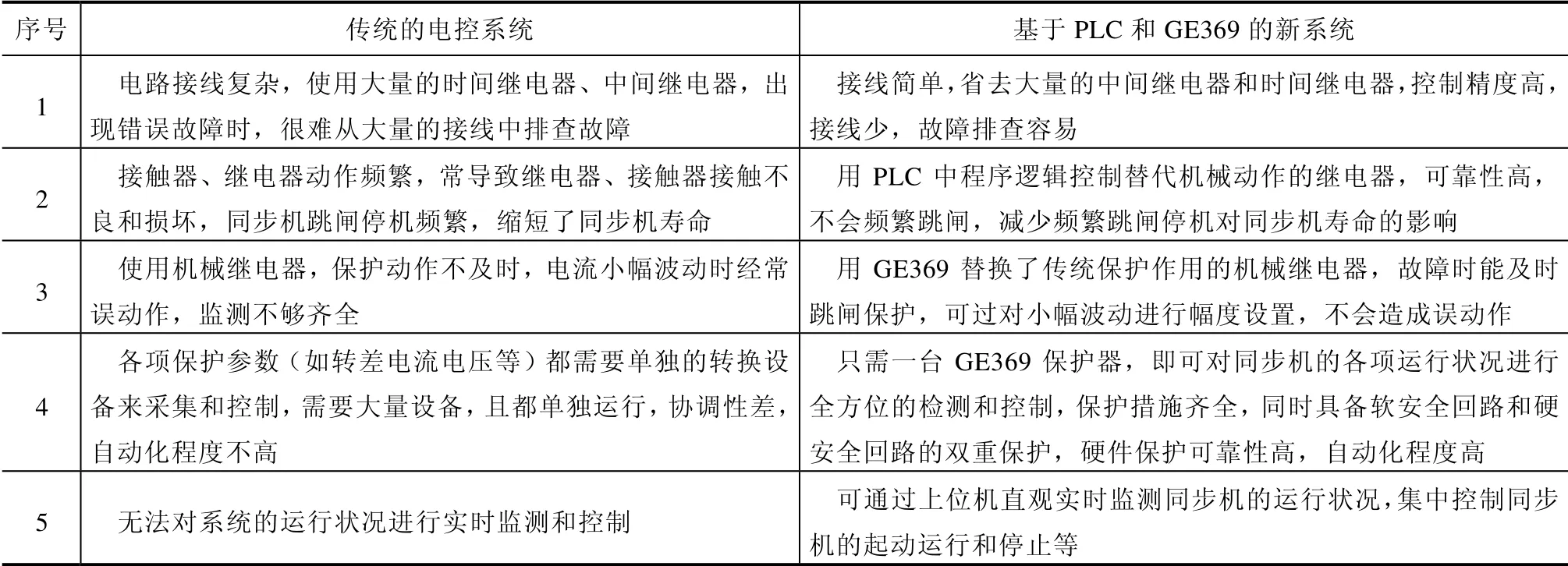
表1 新系統(tǒng)與傳統(tǒng)的電控系統(tǒng)的區(qū)別及優(yōu)勢
4 結(jié)論
采用上位機監(jiān)控+PLC+GE369 控制的新系統(tǒng),經(jīng)過了3年多的運行,較之以前的老系統(tǒng),故障率顯著降低,生產(chǎn)率得到提高,安全性得到保障。
[1] 崔堅.西門子S7 可編程序控制器-STEP7 編程指南[M].北京: 機械工業(yè)出版社,2007.
[2] 吉順平,孫承志,路明.西門子PLC 與工業(yè)網(wǎng)絡(luò)技術(shù)[M].北京: 機械工業(yè)出版社,2008.
[3] 廖常初.PLC 編程及應(yīng)用[M].北京: 機械工業(yè)出版社,2006.
[4] 劉建昌.S7-300/400 工業(yè)網(wǎng)絡(luò)通信技術(shù)指南[M].北京: 械工業(yè)出版社,2009.
[5] 深入淺出西門子Wincc V6[M].北京: 航空航天大學(xué)出版社,2004.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
人大建設(shè)(2019年12期)2019-05-21 02:55:44
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中山大學(xué)法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
環(huán)球時報(2017-03-30)2017-03-30 06:44:45
