電流和速度雙閉環PI控制在機械手模型上的應用
2015-05-30 14:41:41王海龍
科技創新與應用 2015年25期
關鍵詞:仿真
王海龍
摘 要:文章利用matlab對機械手控制進行仿真,依據位置和電流的反饋信息,形成比位置反饋更穩定的雙閉環控制,仿真結果表明雙閉環控制達到了預期目的,并通過德州儀器的TMS320F2812型DSP芯片構建機械手控制系統,通過編程實現機械手的穩定精確控制。
關鍵詞:機械手;仿真;電流;速度
引言
機械手運動的精確控制對伺服系統精度和穩定性要求較高,一般采用閉環PID控制,傳統的數字PID控制是一種技術成熟、應用最為廣泛的控制算法,其結構簡單,調節方便,且不依賴于具體被控對象的數學模型,具有動、靜態性能良好,穩態精度高的特點。但是傳統的PID控制對于動特性復雜的控制對象,其一次整定出的PID參數往往不能達到最優。現代控制理論的發展與應用,一定程度上彌補了經典控制理論對時變非線性隨機系統無能為力的缺點,但一般對被控對象具有一定的依賴性,不能從根本上解決復雜和不確定系統的控制問題。因此,考慮采用電流和速度雙閉環PI控制應用到機械手伺服系統中來。
1 機械手模型
機械手本體動力學建模包括機械手運動學正逆解和機械手剛體動力學建模,是進行機械手控制和基于動力學模型控制算法設計的基礎。
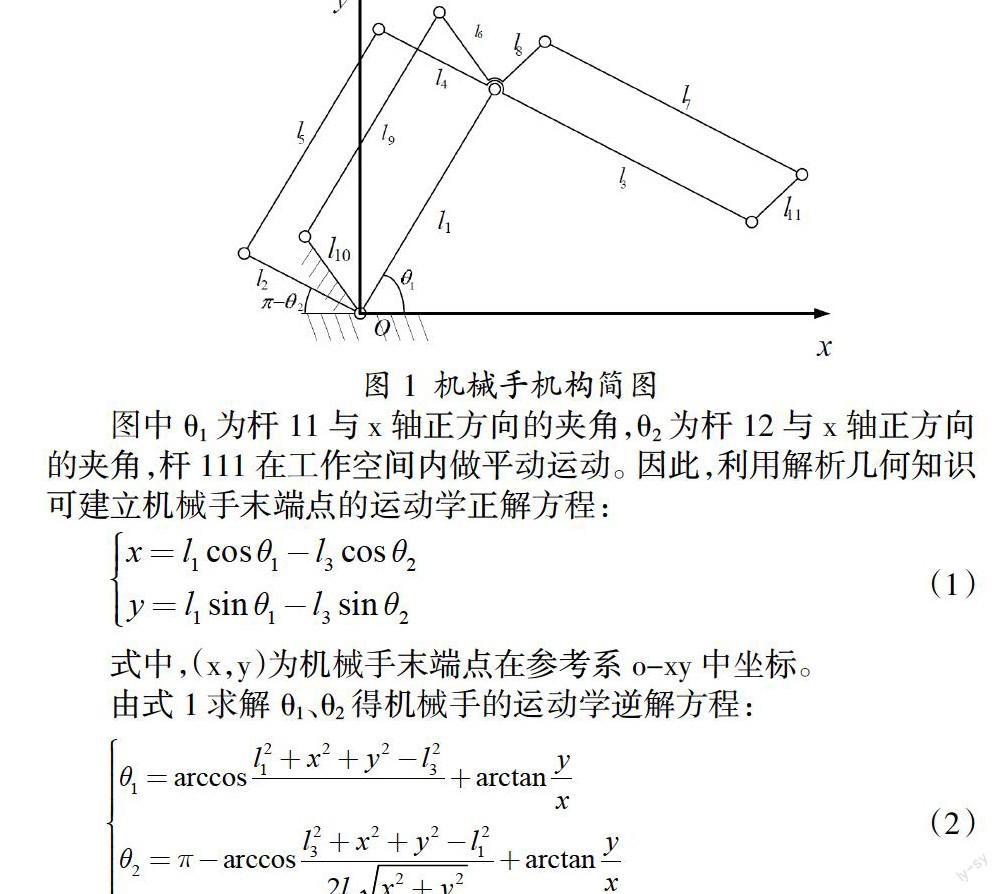
機械手采用的是典型兩自由度平行四邊形結構,機構簡圖如圖1所示。圖中,共有三組平行四邊形,其中桿11、12、14、15為一組,桿11、16、19、110為一組,桿13、17、18、111為一組。以機械手的力矩輸入軸為坐標原點,水平方向為x軸,垂直方向為y軸,建立固定參考系o-xy。
圖中θ1為桿11與x軸正方向的夾角,θ2為桿12與x軸正方向的夾角,桿111在工作空間內做平動運動。因此,利用解析幾何知識可建立機械手末端點的運動學正解方程:
2 PI調節的實現
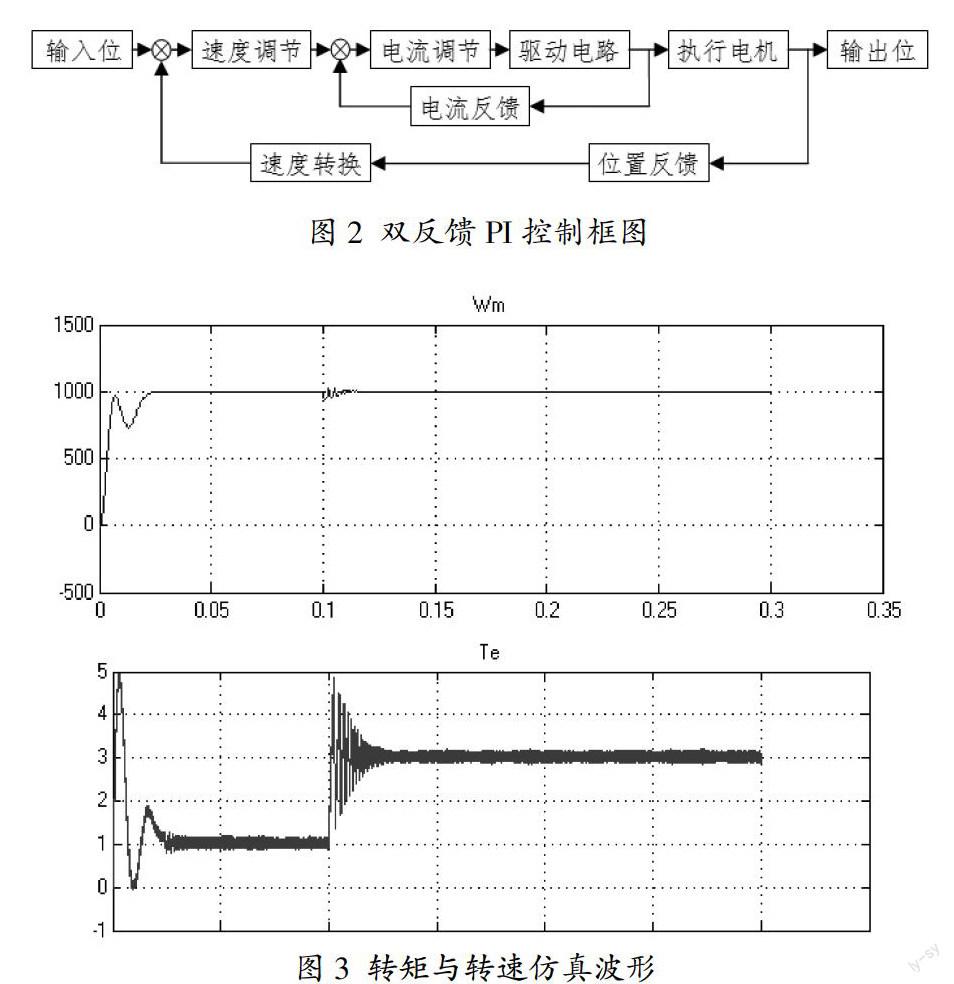
一般在應用中,采用位置反饋實現閉環PI控制,其調節性能并不理想,經常造成后期的速度響應特性差和力矩劇烈振動,出現波形發散等情況。為克服以上問題文章采用電流反饋和位置反饋的雙閉環系統PI控制模型,即在速度給定下,通過反饋回來的電流和位置進行電流差和速度差的PI調節:(1)采集電流,經過與對應參數比較后送入到PI調節器調節。(2)采集光電編碼機械角,轉換為電角度后與給定速度值比較后送入PI調節器。(如圖2所示)
3 仿真與分析
機械手的驅動伺服電機均采用永磁同步電機,并給定速度ω=1000rad/s;轉矩負載給定為1N·m,當系統運行0.1s后,突加轉矩負載到3 N·m,仿真波形如圖3所示。
從雙閉環的轉矩和轉速仿真圖可知,在電機運行到0.1s時突加負載,電機的電磁轉矩和轉速有明顯的波動,但很快便恢復平穩。這是因為當突加負載時,電機出力突然要加大,導致電流也要增加,同時還要保證原來的轉速,此時速度、電流PI調節器產生了作用。PI調節器能快速的調節反饋和給定的誤差,達到輸出跟蹤給定的效果。但是為了提高電機轉速加大給定值,起始時PI輸入的誤差會很大,很容易造成系統超調。為了保證轉速的準確跟蹤,給定的速度就要受到限制。從圖3中可以看出,PI速度調節器控制速度沒有產生超調,系統雖然在啟動和突加負載轉矩時速度和轉矩均有短暫的抖動,但系統能快速的恢復穩定,實現了伺服系統速度模式下的快速跟蹤。
芯片和電路板采用TMS320F2812型DSP芯片作為機械手的控制單元,它可以同時控制2個電機,可應用于多軸動態控制,機械手關節編碼器采用摩川TS5668N021型號絕對編碼器,解碼電路采用國產解碼電路板,采用100:1的減速器連接伺服電機輸出軸與機械手臂。機械手的運動空間為2平方米橫截面,可實現截面內任意點的自由精確控制。
4 結束語
根據MATLAB仿真結果,通過電流采集和坐標轉換、電機轉子角度的反饋計算,實現閉環系統的精確PI控制,達到電機轉速準確跟蹤給定指令的要求,仿真結果符合電機實際運行特性,驗證了電流和速度雙閉環控制的伺服控制系統在控制精度和穩定性上均符合預期要求。
參考文獻
[1]吳鵬.兩自由度并聯機械手動力學建模及其模糊變結構控制[D].哈爾濱工業大學,2007.
[2]趙永杰.高速輕型并聯機械手動態設計理論與方法[D].天津大學,2006.
[3]I to K,Iwasaki M,Matsui N.GA-based practical compensator design for a motion control system. IEEE/ASME. Transiction on Mechatronics,2001,6(2):143-148.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
