基于ADAMS的機床機械手動力學仿真研究
2015-05-30 15:14:38魏書平等
科技創新與應用 2015年25期
魏書平等
摘 要:文章以某企業自動化上下料機床機械為研究目標,構建了簡化的機床機械手模型,然后把該模型導入到ADAMS進行后續的約束和驅動添加,從而獲得機械手的虛擬樣機。并通過運動仿真模擬了機械手關節的運動曲線,結果表明所建立模型正確性與合理性,為后續研究奠定了基礎。
關鍵詞:機床機械手;ADAMS;動力學仿真
在現今的高端智能裝備制造業中,機器人(機械手)是一種極其重要的智能化裝備。機器人的誕生將使生產率得以顯著提高、工作環境得以改善等。所以對機器人的研究意義非凡。許多國內外學者已在機械手控制、設計等相關方面做了大量的研究工作[1-5]。基于ADAMS軟件,文章對機床機械手動力學進行仿真,仿真結果表明所構建三維模型合理性及正確性,為為后續研究奠定了基礎。
1 應用背景及功能分析
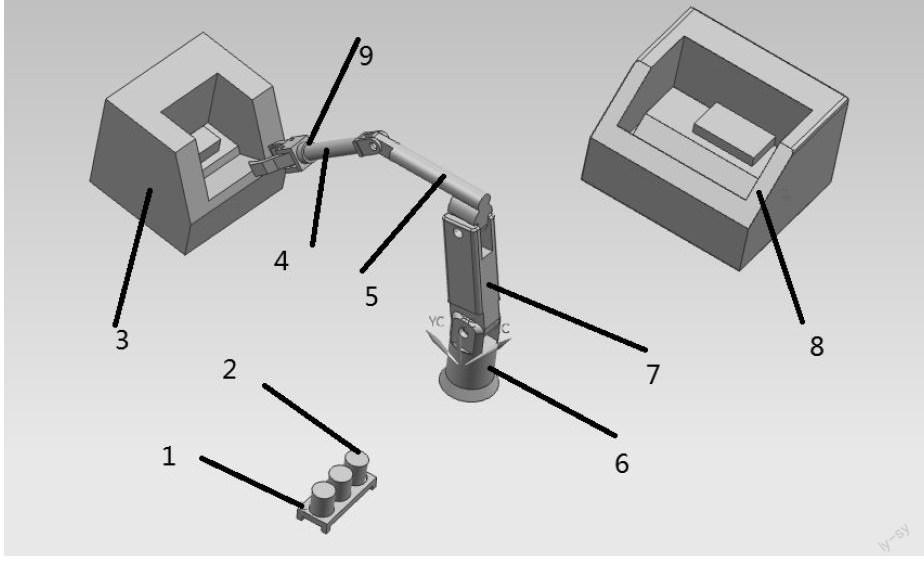
從某企業的實際出發,分析機床機械手完成的功能如下:機床機械手將毛坯件從物料板或者物料箱中取出,放置于機床A中,將機床A加工好的機械手放置于機床B中,將機床B加工好的零件取出,放置到成品車上,完成一個循環。
2 基于ADAMS的機床機械手動力學仿真
2.1 模型構建
在ADAMS中構建復雜的三維模型比較困難,因此,在保證功能的前提下,首先構建了簡化的機床機械手模型,如圖1所示。
2.2 動力學仿真分析
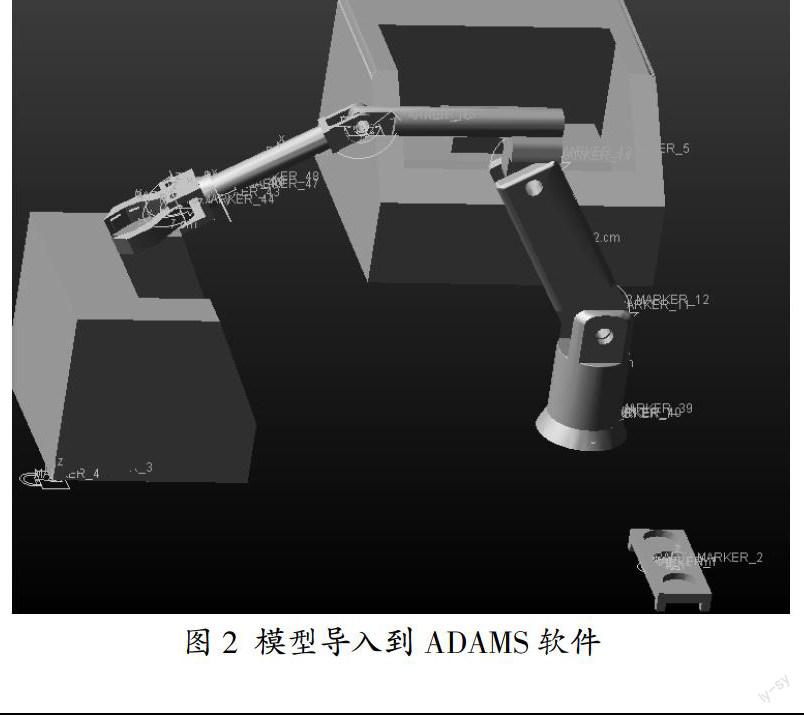
將三維模型導入到ADAMS中,將相應的運動副約束和驅動約束添加到模型中,如圖2所示。
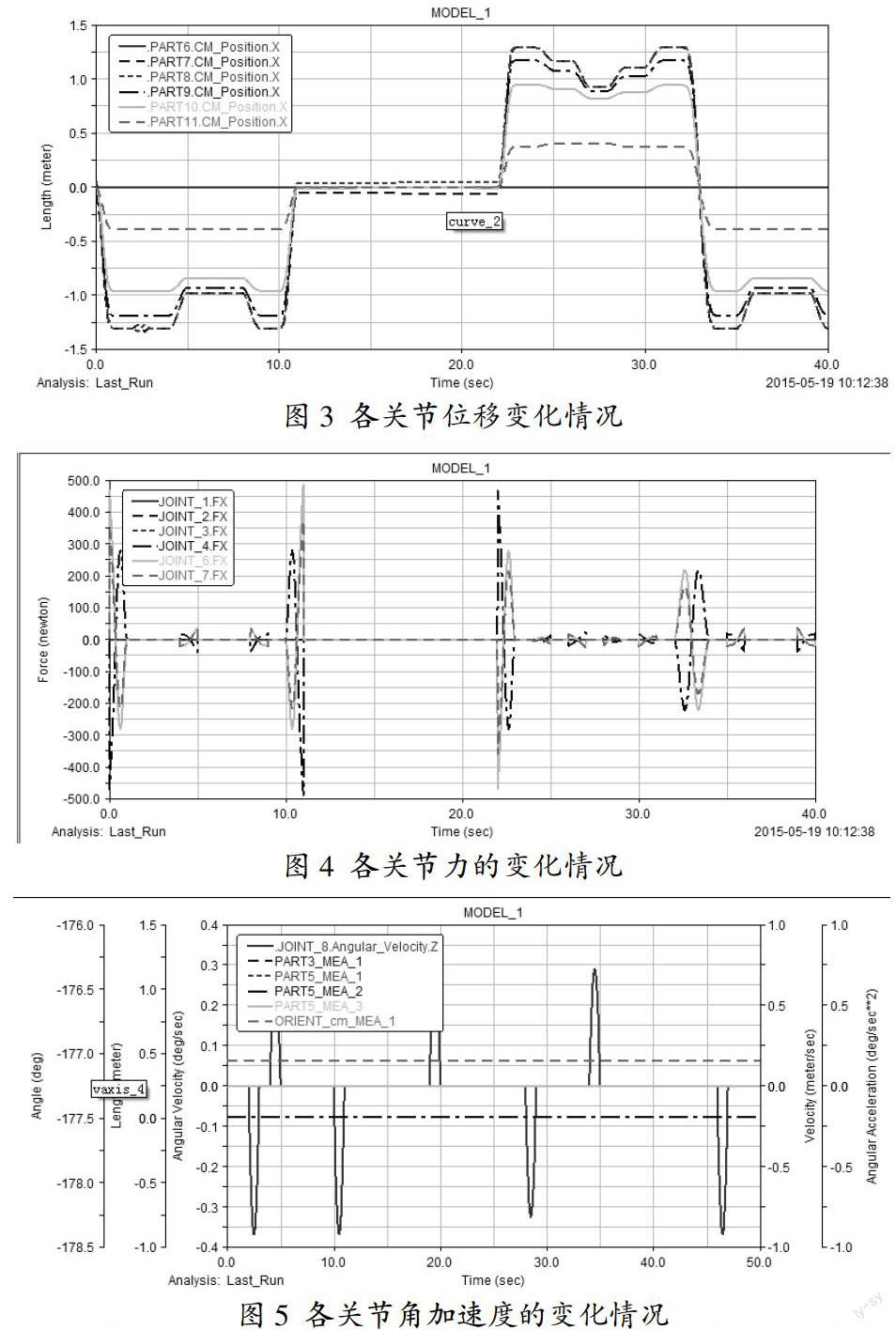
經仿真后得到機械手各關節位移變化的曲線(圖3)、各關節力變化的曲線(圖4)、各關節角加速度變化的曲線(圖5)。
從仿真結果可以看出,機械手的各個關節的運動比較平穩,角位移、角加速度和關節力的變化曲線變化比較平緩,由此證明了所設計的機床機械手結構是比較合理的。
3 結束語
通過對機床機械手的運動學仿真分析,使機床機械手的整個運動功能直觀,同時得到了各關節的驅動力、各關節的位移、角加速度變化曲線。該結果可以為機械手的軌跡控制與規劃提供基礎;另外,通過仿真可以帶來設計過程的簡化、開發費用的減少、設計周期的縮短等諸多好處,并為下一步機械手的智能控制提供了一定的參考。
參考文獻
[1]黃金風.MSRS和ODE環境下POWERCUBE模塊化機械手的仿真研究[D].大連:大連交通大學,2010.
[2]張明輝,禚寶海.Diamond并聯機械手動力學仿真的Simulink實現[J].山東科技大學學報:自然科學版,2010,29(1):90-94.
[3]劉淑英,張明路,韓慧伶.五自由度機械手動力學分析與仿真[J].河北工業大學學報,2009,38(2):32-36.
[4]Muller A, Hufnagel T. Model-based control of redundantly actuated parallel manipulators in redundant coordinates. Robotics and Autonomous Systems, 2012, 60(1):563-71.
[5]王霞,李占君,王平.基于ADAMS的六自由度機械手的運動仿真分析[J].礦山機械,2010,38(8):28-31.
作者簡介:魏書平,女,安徽工程大學本科生。
