一種多方位系列化演示儀的設計與分析*
2015-06-14 09:13:58劉旭帥陸體文劉思毫周超超陳定方
機械制造 2015年7期
□ 劉旭帥 □ 陸體文 □ 劉思毫 □ 周超超 □ 陳定方
武漢理工大學智能制造與控制研究所 武漢 430063
產品展示伴隨著經濟、文化的發展而日益成為當今不可或缺的社會活動之一,對經濟、生活和文化等領域都產生了很大的影響。產品展示是一個包含廣泛、綜合性強的活動,它與建筑設計、環境設計、工業設計、視覺傳達設計、影視動畫設計、電子設計、多媒體技術等多個領域有著密切聯系,并在一定的空間環境內,通過視覺、聽覺、嗅覺甚至觸覺和味覺等多種感官,將要傳達的信息有序、系統且有效地傳遞給觀眾,使觀眾對主辦方要展示的內容產生全面的了解。
現今展示的設備多以平板簡單搭建展示臺為主,既不能對產品進行全方位充分的展示,也不能滿足對系列化產品系統化的展示,更不能照顧到后排觀眾。針對現狀,筆者設計了一種多方位系列化演示儀,并對其重要機構進行相關分析和仿真。
1 整體設計和工作流程
如圖1所示,多方位系列化演示儀主要由剪叉機構和防擺機構組成。剪叉機構通過雙向螺桿連接在一起,左右剪叉機構分別支撐著中心軸的兩個軸承座,2塊三角板連接在中心軸上,3個置物架通過軸固定在三角轉架的3個頂點上。平行四邊形機構(平行四邊形機構由連桿、2個曲柄和三角板組成)與置物架的軸相連,用來保持置物架在運動過程中的水平。

▲圖1 多方位系列化演示儀機構分布圖
工作時,電機驅動槽輪機構(本文不贅述)帶動中心軸與三角轉架轉動,此過程中,由于帶傳動與平行四邊形機構的共同作用,置物架在繞中心軸旋轉的同時,一直保持水平狀態。當槽輪轉過90°時,三角轉架轉動120°停下來鎖死。接著,剪叉機構中的滑塊在雙向螺桿的帶動下等速向中間移動,由此推動機架升起。
2 剪叉機構的設計與分析
2.1 剪叉機構的設計
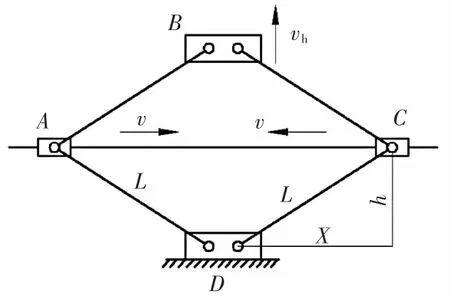
▲圖2 新型剪叉機構機構簡圖
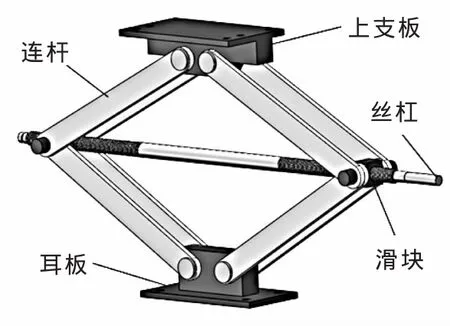
▲圖3 新型剪叉機構三維模型

▲圖4 剪叉式上升機構受力簡圖
常見的起升機構有剪叉式、齒輪爬升式等,由文獻資料發現,剪叉式起升機構具有空間伸展性強、制造相對簡單、工作穩定可靠和承載能力較強的特點。考慮到旋轉裝置的質量較大以及整個展示臺的體積不應過大,可應用剪叉機構來實現旋轉機架的上升。剪叉機構一般均用液壓作為上升動力,而液壓系統的設計、安裝與控制比較復雜,經過思考與論證,提出了一種利用雙向絲杠驅動平行四邊形的兩對角點而使平臺上升的新型剪叉機構,四邊形上下兩頂點分別與上支板和底面機架鉸接,而絲杠上的兩滑塊則將上下兩連桿鉸接在其一端,機構簡圖和SolidWorks三維模型分別如圖2和圖3所示。
2.2 剪叉機構的運動學與動力學分析
新型剪叉式機構的運動情況直接影響著整個機架起升的平穩性,因此有必要對其運動學與動力學特性進行分析,機構的受力簡圖如圖4所示。
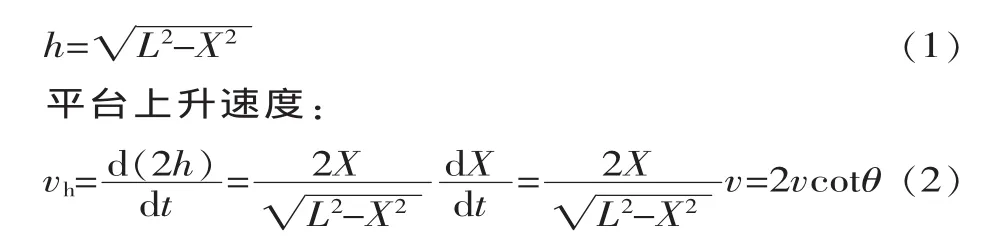
由機構簡圖可以得到如下幾何關系:

▲圖5 平臺速度與加速度圖
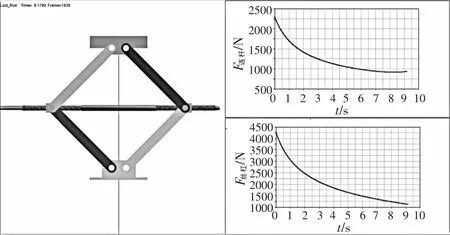
▲圖6 剪叉機構受力圖
將建立的SolidWorks三維模型保存為parasolid(x_t)格式,導入到ADAMS中,定義材料屬性,添加約束和運動后,對新型剪叉機構進行運動學仿真,得到平臺上升的速度與加速度曲線,如圖5所示。另一方面,測量滑塊與各桿鉸點處的受力情況,得到剪叉機構在運動過程中的動力學特性,如圖6所示。
從圖5得出,隨著絲杠的勻速轉動,上支板作減加速度運動,運行情況與理論分析幾乎一致,符合功能設計要求。圖6既反映了連桿的受力情況,也反映了絲杠的受力情況。從仿真結果可知,連桿和絲杠所受軸向力均隨θ的增大而不斷減小,證明了理論分析的正確性以及該機構設計的合理性,能夠滿足起升功能要求。
3 防擺機構的設計與分析
3.1 防擺機構的設計
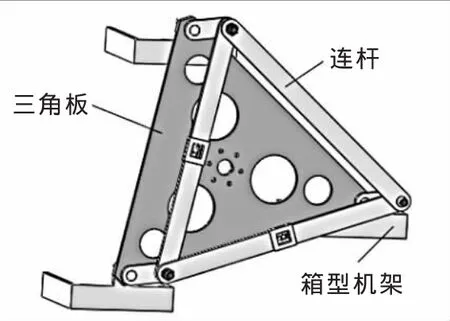
展示產品在旋轉過程中,為避免其翻轉而掉落,必須使展示產品在繞中心軸旋轉的過程中始終保持水平。防擺機構由中心軸、三角板、箱型機架、平行四邊形機構與連桿以及同步帶傳動機構組成。
防擺機構的虛擬樣機如圖7所示,在運行過程中,中心軸帶動三角板一起旋轉,實現所有箱型機架的防擺旋轉運動。
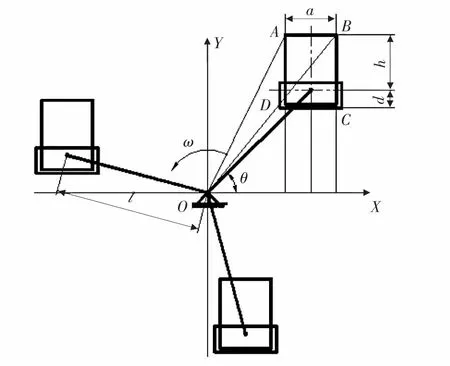
3.2 三角轉架的主要尺寸優化
三角轉架運動簡圖如圖8所示,主要尺寸包括三角轉架中心軸到箱型機架中心軸的距離l以及三角轉架的厚度。當l取得較大時,可以滿足工作要求,而當l減小到某一確定值后,則在旋轉過程中會出現箱型機架與三角轉架中心軸發生干涉現象。因此以整機質量最輕、體積最小以及用料最省的優化目標對l進行優化。
▲圖7 防擺機構的三維模型
▲圖8 三角轉架運動簡圖
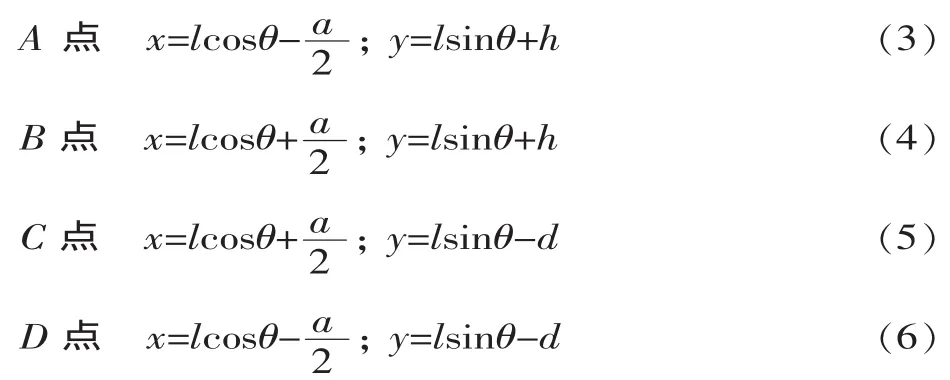
用數值方法對其進行分析,以三角轉架中心軸為坐標原點建立坐標系,分析圖8可以發現,只有當箱型機架上的A、B、C、D4個點在運行過程中與三角轉架中心軸沒有碰撞,則整個箱型機架能順利繞三角轉架中心軸完成360°旋轉。經過相關幾何關系的計算,可以將這 4個點的坐標用已知量 a(200mm)、h(240mm)、d(78mm)以及 l表示出來,它們分別為:
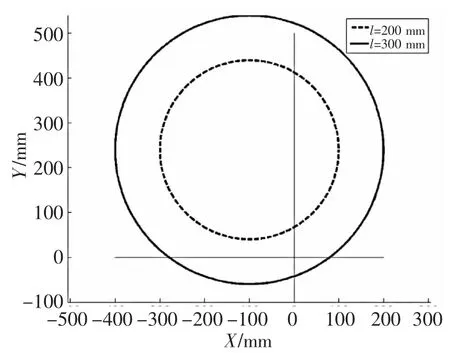
以A點為例,利用以上推導公式在MATLAB軟件中繪制出其運動軌跡,為了便于對比分析,取l=300mm與200mm進行繪制,得到的軌跡分別如圖9所示。
當l取200mm時,其軌跡不包括原點,說明在運行過程中,箱型機架下部已與三角轉架中心軸發生干涉, 而l取300mm時,其軌跡包括原點,說明在運行過程中,箱型機架下部不會與三角轉架中心軸發生干涉。由以上分析可以看出,只有當4個點的運行軌跡均包含原點時,才能滿足運動條件。
利用上述分析結果,以三角轉架的面積為對象建立相關優化目標函數以及約束條件,即:
▲圖9 l取不同值時A點的軌跡圖
在MATLAB中編寫優化目標函數以及約束條件的相關程序,以l=200mm作為初始點,采用interiorpoint優化方法進行優化,最終得到 l*=260mm,s(l*)=8.781 5×104mm2。優化后A、B、C、D 4個點的軌跡如圖10所示。
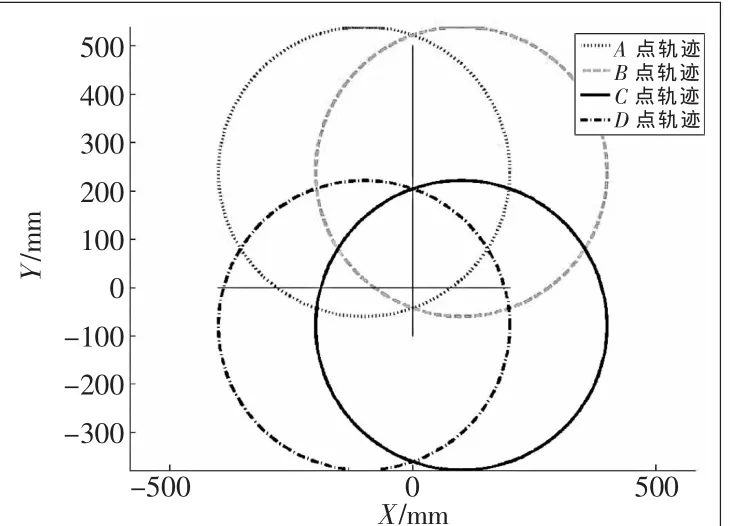
▲圖10 4點的軌跡圖
4 總結
提出了一種多方位系列化演示儀展示裝置,通過建立三維模型,對核心部分進行了結構優化和運動學、動力學分析,采用相關軟件對重要構件進行仿真分析和驗證,測試和驗證結果表明,機械設計合理正確,能完成相關功能與要求。
[1]陳定方,羅亞波.虛擬設計(第二版) [M].北京:機械工業出版社,2007.
[2]呂庸厚,沈愛紅.組合機構設計與應用創新[M].北京:機械工業出版社,2008.
[3]鄭文緯,吳克堅.機械原理(第七版)[M].北京:高等教育出版社,2000.
[4]聞邦椿.機械設計手冊(第五版第二卷)[M].北京:機械工業出版社,2010.
[5]袁駟.程序結構力學[M].北京:高等教育出版社,2001.
[6]李增剛.ADAMS入門詳解與實例[M].北京:國防工業出版社,2010.
[7]彭文生,黃華梁,王均榮,等.機械設計(第二版)[M].武漢:華中理工大學出版社,2003.
[8]劉鴻文.材料力學[M].北京:高等教育出版社,2004.
[9]劉惟信.機械最優化設計(第二版)[M].北京:清華大學出版社,1997.
[10] Marcus Sandberg,Ilya Tyapin,Michael Kokkolaras,et al.A Knowledge-based Master-model Approach with Application to Rotating Machinery Design [J].Concurrent Engineering Research and Applications,2011,19(4):295-305.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業技術(2016年15期)2016-12-01 05:31:22
