大功率異步電動機新型軟起動裝置的設計與實現
2015-06-25 02:51:40王貴鋒
電氣傳動自動化 2015年4期
李 峰,王貴鋒
(蘭州理工大學技術工程學院,甘肅蘭州730050)
1 引言
交流異步電動機以其結構簡單、低成本、高可靠性和維護方便等優點在各種工業領域中得到廣泛的應用。電動機在負載時,會產生5倍-10倍額定電流強度的起動電流。特別是對大功率的電動機來說,大起動電流會對電網造成很大的沖擊電流,影響其他負載的正常運行,從而引發故障。停機時,傳統的控制方式使電動機轉速在短時間內由額定轉速降為零,會給設備帶來沖擊,降低電氣使用壽命。
因此采用電力電子技術、半導體技術與計算機技術開發異步電動機軟起動技術具有重要的實際應用價值和學術意義。本文設計一種由晶閘管組成的軟起動裝置,應用晶閘管移相技術,使加到電動機上的電壓按某一規律慢慢達到全電壓。通過適當地設置控制參數,可以使電動機的轉矩和電流與負載要求得到較好的匹配。使用軟起動技術,在電動機的選型上可以選用容量較小的電動機,也減少了不必要的設備投資,通過軟停機技術,可以避免電動機瞬時停機帶來的沖擊,進一步延長設備的工作壽命[1]。
2 主電路設計
軟起動裝置的主電路采用典型的交流調壓電路,即3組反并聯的晶閘管構成調壓電路,如圖1所示。本設計中異步電動機的額定功率PN為50kW,額定電流ⅠN為100A。
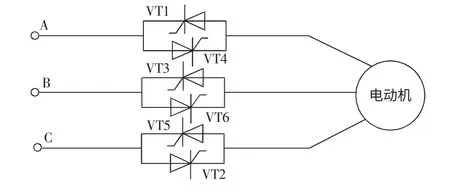
圖1 軟起動裝置的主電路
3 控制電路的實現
系統的控制功能主要由控制算法來實現。在設計閉環調速系統時,設計了合適的動態矯正裝置,用來改造系統,使它同時滿足動態穩定性和穩態性能指標兩方面的要求[5]。電壓調節器和電流調節器均采用PI調節器。根據偏差的比例P、積分I進行控制。比例調節器的輸出只取決于輸入偏差量的現狀,而積分調節器的輸出包含了輸入偏差量的全部歷史。在模擬過程控制系統中,基本控制回路是簡單的反饋回路。反饋值與給定值進行比較,得到偏差,模擬調節器用一定的控制律使操作變量變化,以使偏差趨近于零,實現無靜差調速。
系統結構框圖如圖2所示,左邊的6個方塊是軟起動器的6個環節,右邊電機的傳遞函數。軟起動裝置的6個環節的功能是:環節1和2分別是外環電壓調節器和內環電流調節器,它們的調節規律是比例積分PI。環節3是觸發環節,提供晶閘管主電路的觸發脈沖。環節4和5為放大環節和隔離環節,對信號進行放大和隔離。環節6為晶閘管的主電路。該系統既限制了電流,又使端電壓平穩上升。由于是雙閉環控制,保證了電機起動過程的穩定性及可靠性。

圖2 雙閉環軟起動控制過程的系統結構圖
4 軟起動裝置總體原理圖的設計
4.1 電壓反饋電路設計
反饋環節電壓的獲取,是通過電壓互感器從主電路中獲取電壓,實現轉矩控制時的電壓閉環。電動機不能長時間地運行于過電壓狀態。同樣,由于異步電動機負載有輕載和重載的變化過程,若電網電壓不足,重載運行時可能會因為無法驅動負載而造成轉速下降甚至發生堵轉現象。在系統中加入了過壓和欠壓保護,因此需要電壓檢測電路。
三相電壓反饋電路如圖3所示,系統工作時,電壓互感器輸出的UA、UB、UC和三相電壓分別經過全橋整流、濾波和分壓后獲得一個10V的直流電壓信號,將此信號作為反饋輸入信號接到觸發芯片的電壓反饋端。該電壓反饋信號既作為系統軟起動時的電壓反饋信號,又可以作為電動機運行時的過壓和欠壓保護信號。
圖3中的整流電容不能太大(這里取1μF),否則濾波后的電壓變化不夠靈敏,會產生較大的時間延時和誤差。
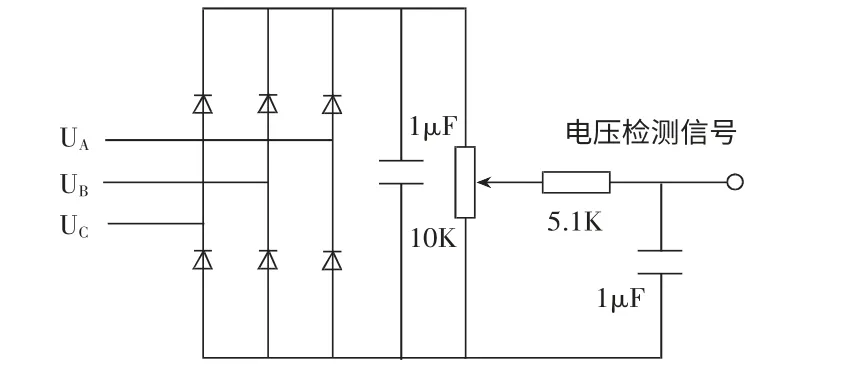
圖3 電壓反饋電路圖
4.2 電流反饋電路設計
為了實現電流閉環和過流短路保護,設計了電流檢測電路,如圖4所示。采用電流互感器檢測電動機定子端三相定子電流的大小,電流互感器的輸出I′A、IA、IB、IC經過全橋整流、濾波和分壓后獲得一個1V直流電流信號,將此信號作為反饋輸入觸發芯片的電流反饋端作為電流反饋信號。把輸入的同步電壓信號改為電流信號。圖4中的整流電容也取1μF,可調電阻R的最大值取10kΩ,可以較好地滿足檢測要求。另外,該電流反饋信號既作為系統軟起動時的電流反饋信號,又作為電動機運行時的過流和短路保護信號。
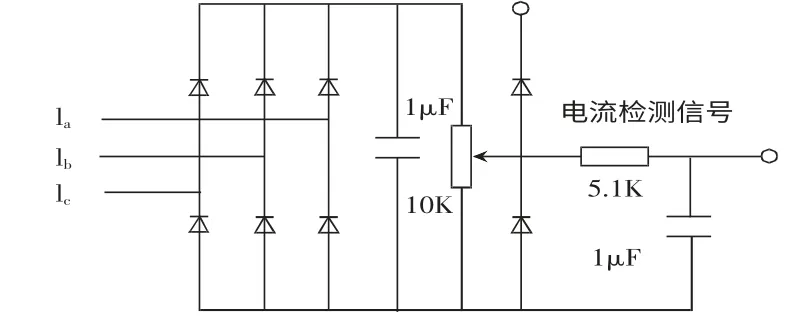
圖4 電流反饋電路
4.3 系統總體原理圖的設計
系統的整體設計如圖5所示。起動電動機時,按下起動按鈕后,電動機進入軟起動階段。通過集成觸發芯片BSC6M-1三相晶閘管控制觸發板控制觸發脈沖,電壓慢慢增加,直到達到全壓電動機正常運行。電壓和電流的雙閉環的實現是通過電壓、電流互感器,然后經過整流、分壓得到反饋信號。通過給定與反饋的比較,用PI調節器實現無靜差控制,使系統穩定運行。設計中還加入了各種保護措施,如過電壓、過電流和晶閘管的電壓上升率和電流上升率保護。
大功率的50kW異步電動機軟起動裝置的設計,采用了雙閉環控制的三相交流調壓電路;對于電壓外環和電流內環的控制規律均采用PID控制中的比例積分實現無靜差控制[7]。晶閘管的觸發電路采用集成芯片BSC6M-1三相晶閘管控制觸發板,其各項指標都滿足設計要求。
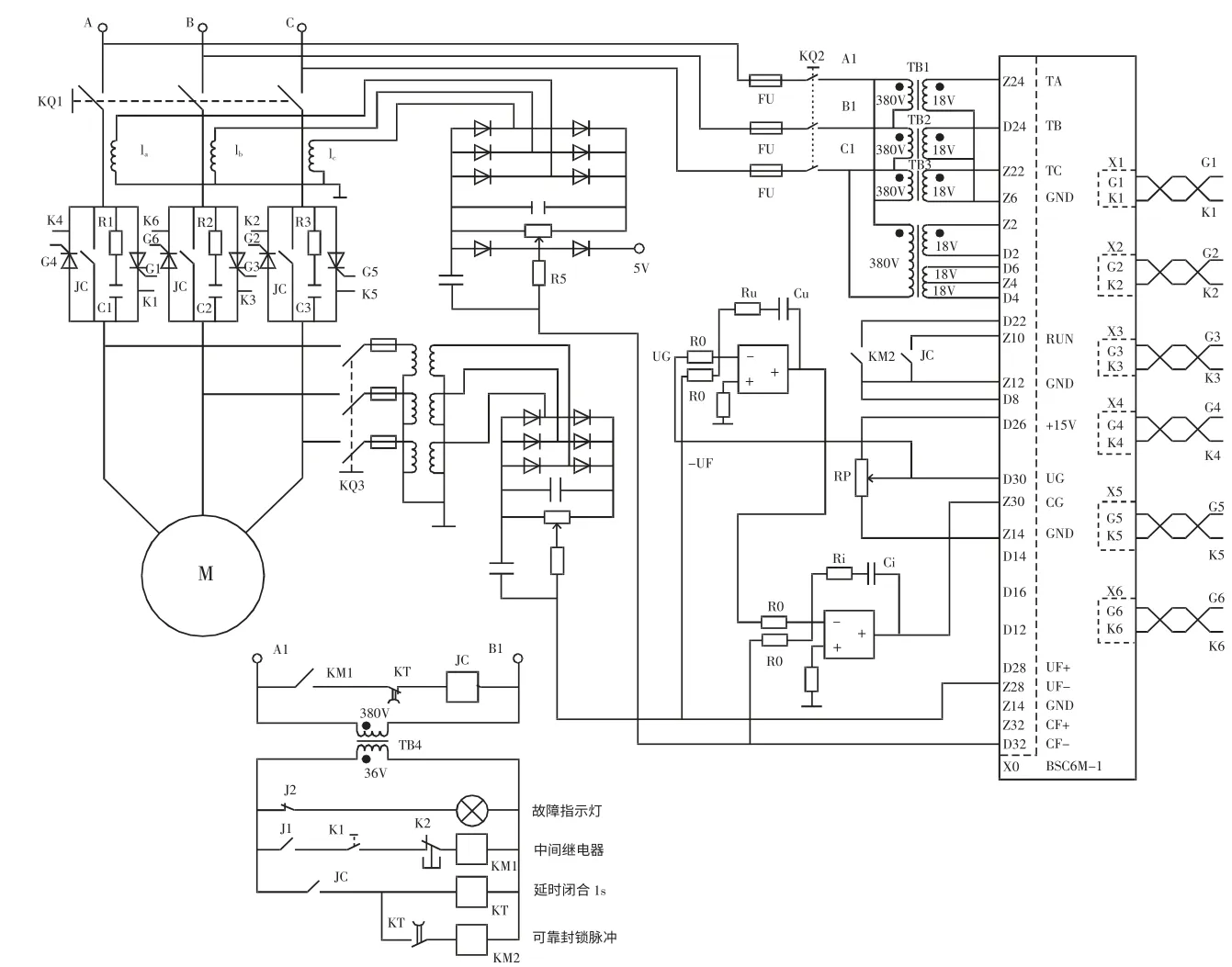
圖5 50kW異步電動機軟起動裝置電路原理圖
4.4 過電壓保護
晶閘管整流電路正常工作的最大電壓是線路的峰值電壓,凡是超過這個峰值電壓的都算是過電壓。過電壓分為操作過電壓及浪涌過電壓兩種,操作過電壓是由變壓器的合閘以及晶閘管元件本身關斷引起的,浪涌過電壓是由于雷擊等原因從電網侵入的偶然性過電壓,它可能比操作過電壓還要高。對操作過電壓所設的保護措施,也會對浪涌過電壓有抑制作用。
如圖6所示為RC阻容吸收電路。軟起動裝置在每一相晶閘管兩端并聯RC阻容吸收回路進行電壓上升率的限制。
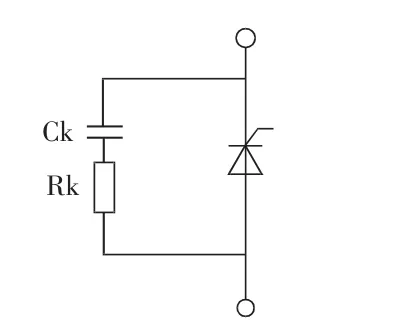
圖6 RC阻容吸收電路
4.5 過電流保護
若過電流數值較大而切斷電路的時間又稍長,則晶閘管因為熱容量小會產生熱擊穿而損壞,因此必須設置過電流保護。在本系統中采用快速熔斷器保護晶閘管的過電流[10]。采用控制電路中的電流調節器或電流截止環節來實現。當發生過載,電流超過一定數值時,通過調節環節移動觸發脈沖相位降低整流電壓,使電動機轉速降低,從而將過載電流限制在一定數值之內;或通過封鎖信號封鎖移相觸發脈沖。
5 結論
本文采用雙閉環控制的三相交流調壓電路設計了異步電動機軟起動裝置。對于電壓外環和電流內環的控制規律采用PID控制中的比例積分實現無靜差控制。根據電動機的參數選擇主電路晶閘管的耐壓值和額定電流。通過對三相交流調壓電路中的6個晶閘管的相位控制實現控制電動機的電壓,完成了軟起動裝置的設計。設計中集成芯片BSC6M-1三相晶閘管控制觸發器,各項指標都滿足設計要求。
通過對電動機的軟起動裝置的設計,減小了異步電動機起動過程中對電網的沖擊、消除了傳統降壓起動設備的有級觸點控制對異步電動機的沖擊、改善異步電動機的起動特性。根據該電動機性能參數選取了合適的晶閘管元件,內環電流控制及外環電壓控制采用PI控制,不但限制了電流,又使端電壓平穩上升,實現了交流異步電動機平穩軟起動。
[1]逄海萍,康 健,朱殿琪.異步電動機軟啟動節能控制器[J].電工技術,2001,(1).
[2]邱阿瑞,柴建云,孟 朔等.現代電力傳動與控制[M].北京:電子工業出版社,2004.
[3]羅 飛.運動控制系統[M].北京:化學工業出版社,2001.
[4]錢 平.交直流傳動控制系統[M].北京:高等教育出版社,2001.
[5]陳伯時.電力拖動自動控制系統[M].北京:機械工業出版社,2003.
[6]黃 俊,王兆安.電力電子技術[M].北京:機械工業出版社,1994.
[7]呂 鋒,孫 楊.異步電動機的軟起動器[J].華北電力技術,2001,(6).
[8]楊 偉,吳茂剛.電機軟啟動器的原理與應用[J].農機化研究,2005,3(2):21-25.
[9]李 翔,胡虔生.異步電動機軟啟動技術的應用及展望[D].江蘇省電工技術學術論文集.江蘇:蘇州大學,2004.
[10]駱寶俊.異步電動機軟起動器研究[D].江蘇:南京理工大學,2007.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
