基于Pro/E和ADAMS的絕緣子帶電干冰清洗機(jī)器人的運(yùn)動(dòng)仿真分析
2015-07-07 07:06:12孫景福唐術(shù)鋒李華雷
制造業(yè)自動(dòng)化 2015年7期
孫景福,唐術(shù)鋒,李華雷
(1.內(nèi)蒙古工業(yè)大學(xué) 機(jī)械學(xué)院,呼和浩特 010051;2.內(nèi)蒙古電力科學(xué)研究院,呼和浩特 010020)
0 引言
隨著社會(huì)經(jīng)濟(jì)的迅速發(fā)展,大氣中的污染物種類越來(lái)越復(fù)雜,污染程度也越來(lái)越高,污穢的產(chǎn)生對(duì)電力系統(tǒng)的安全運(yùn)行造成了極大的威脅[1]。絕緣子帶電干冰清洗作業(yè)是保證電力系統(tǒng)能安全、可靠運(yùn)行的重要環(huán)節(jié),其清洗效果直接影響到設(shè)備的維修和運(yùn)行型。因此,本文從絕緣子清洗效果和環(huán)保的方向出發(fā),以帶電干冰清洗機(jī)器人為研究對(duì)象,采用Pro/E技術(shù)對(duì)該機(jī)器人進(jìn)行三維模型樣機(jī)的建立,結(jié)合仿真軟件ADAMS綜合對(duì)其進(jìn)行運(yùn)動(dòng)學(xué)仿真分析。
1 絕緣子帶電干冰清洗機(jī)器人運(yùn)動(dòng)學(xué)分析
應(yīng)用機(jī)器人運(yùn)動(dòng)學(xué)求解常用方法D-H法[2],此方法計(jì)算起來(lái)比較復(fù)雜,為了增強(qiáng)機(jī)器人整體剛性,提高控制精度及其穩(wěn)定性,該機(jī)器人采用平行四邊形連桿結(jié)構(gòu),為了便于對(duì)并聯(lián)部分的運(yùn)動(dòng)進(jìn)行分析求解,設(shè)置一個(gè)固定坐標(biāo)系XOY,隨平行四邊形部分繞腰部一起轉(zhuǎn)動(dòng)[3,4],如圖1所示,為絕緣子帶電干冰清洗機(jī)器人運(yùn)動(dòng)機(jī)構(gòu)簡(jiǎn)圖。

圖1 絕緣子帶電干冰清洗機(jī)器人運(yùn)動(dòng)機(jī)構(gòu)簡(jiǎn)圖
1)正求解計(jì)算
機(jī)械臂部分由開始位置運(yùn)動(dòng)圖示位置時(shí),大臂l1與X軸的夾角為α,連桿l2與X軸的夾角為β,O點(diǎn)坐標(biāo)為(0, 0),C點(diǎn)坐標(biāo)為(X1, Y1),D點(diǎn)坐標(biāo)(X2,Y2),E點(diǎn)坐標(biāo)為(X,Y)。
如以上機(jī)構(gòu)簡(jiǎn)圖,RtΔOCG中則C點(diǎn)坐標(biāo)為:

在RtΔCFD中則D點(diǎn)坐標(biāo)為:

由式(1)、式(2)可得工具末端E點(diǎn)的坐標(biāo)為:

把l1=1285mm,l2=230mm,l3=1310mm,l4=375mm帶入式(3)可得:

2)逆求解計(jì)算
逆求解計(jì)算是已知工具末端E點(diǎn)的坐標(biāo),然后來(lái)得到大臂與X軸的夾角α,連桿與X軸的夾角β,已知E點(diǎn)坐標(biāo)可得到D點(diǎn)的坐標(biāo),即:

如圖1所示,在ΔOCD中,

同理可得:

綜上式(5)、式(6)和式(7)可得:

把l1=1285mm,l2=230mm,l3=1310mm,l4=375mm帶入式(8)可得:

2 基于Pro/E絕緣子帶電干冰清洗機(jī)器人的三維模型的建立
利用ADAMS進(jìn)行三維實(shí)體建模比較困難,這里借助Pro/E 5.0軟件對(duì)絕緣子帶電干冰清洗機(jī)器人各個(gè)零件進(jìn)行三維實(shí)體建模,然后再導(dǎo)入到ADAMS中進(jìn)行仿真分析[5]。
首先借助Pro/E 5.0軟件,利用其實(shí)體建模模塊提供的功能,如拉伸、旋轉(zhuǎn)、陣列、掃描、混合、倒角、螺紋孔等,建立各個(gè)零件三維實(shí)體模型;并將建立好的各個(gè)零件的三維實(shí)體模型保存在工作目錄[6]。
然后進(jìn)入裝配模式后按設(shè)計(jì)要求正確裝配零部件,并根據(jù)連接方式對(duì)每個(gè)零件進(jìn)行約束。這里要注意的是基件的裝配位置,第一個(gè)零件的放置會(huì)影響到導(dǎo)入ADAMS后的顯示位置。圖2所示為絕緣子帶電干冰清洗機(jī)器人三維模型的截圖。

圖2 絕緣子帶電干冰清洗機(jī)器人三維模型
3 運(yùn)動(dòng)學(xué)仿真
3.1 模型的導(dǎo)入
由于Pro/E中的三維樣機(jī)模型直接輸出的格式并不能在ADAMS中進(jìn)行直接調(diào)用,所以采取在Pro/E中導(dǎo)出x_t格式,再將該模型導(dǎo)入到ADAMS中。打開ADAMS/View界面,然后單擊主菜單中的File→Import,單擊Import會(huì)出現(xiàn)文件導(dǎo)入對(duì)話框如圖3,并按照?qǐng)D3進(jìn)行設(shè)置,然后單擊OK,完成了模型的導(dǎo)入[7]。

圖3 文件導(dǎo)入對(duì)話框
3.2 設(shè)置仿真環(huán)境的參數(shù)
1)設(shè)置工作柵格和單位。
2)按仿真環(huán)境中的模型設(shè)置正確的重力方向。
3)修改樣機(jī)模型的每一個(gè)零部件的材料屬性(整個(gè)機(jī)器人零部件中,除了底座和部分連桿為硬質(zhì)鋁合金LY12外,其余零部件材料均為MC尼龍66)。
3.3 模型的簡(jiǎn)化
由于導(dǎo)入的模型比較復(fù)雜,會(huì)影響仿真結(jié)果,因此要對(duì)虛擬樣機(jī)模型進(jìn)行簡(jiǎn)化處理,首先刪除相對(duì)于樣機(jī)模型沒(méi)有運(yùn)動(dòng)關(guān)系,且質(zhì)量很小的零件,如螺栓、螺母或者墊片等,然后利用布爾和操作將相互之間不存在運(yùn)動(dòng)關(guān)系,并且材料屬性有相同的部件連接在一起,圖4為簡(jiǎn)化后的虛擬樣機(jī)模型。

圖4 簡(jiǎn)化后的虛擬樣機(jī)模型
3.4 運(yùn)動(dòng)副的建立
設(shè)置各個(gè)連桿之間的運(yùn)動(dòng)關(guān)系,完成各運(yùn)動(dòng)部件之間的運(yùn)動(dòng)副的建立。具體連接關(guān)系如表5所示,最終虛擬樣機(jī)模型如圖5所示。

表1 連接關(guān)系

圖5 虛擬樣機(jī)模型
3.5 仿真分析
本文中基于機(jī)器人的工作情況,工具末端做垂直升降,給工具末端添加移動(dòng)副,并添加驅(qū)動(dòng),然后對(duì)仿真對(duì)話框進(jìn)行設(shè)置End Time=180,Step=400,進(jìn)行仿真,得到主臂和連桿的角速度曲線如圖6和圖7所示,并測(cè)得工具末端的位移曲線如圖8所示,然后通過(guò)ADAMS/Post processor生成主臂和連桿的速度樣條曲線分別命名為ZB_2和LG_2,返回ADAMS/View界面,把樣條曲線添加到主臂和連桿上,即把主臂上的驅(qū)動(dòng)MOTION_ZB修改為1d *CUBSPL(time,0,.robot_20141108.ZB_2,0),把連桿上的驅(qū)動(dòng)MOTION_LG修改為1d * CUBSPL(time,0,.robot_20141108.LG_2,0)并把工具末端的移動(dòng)副和驅(qū)動(dòng)進(jìn)行抑制,再次對(duì)虛擬樣機(jī)進(jìn)行仿真分析[8,9]。
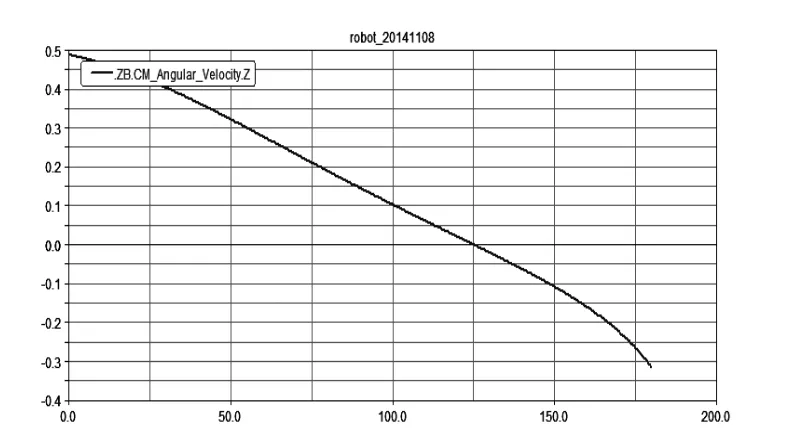
圖6 主臂電機(jī)的運(yùn)動(dòng)角速度曲線

圖7 連桿電機(jī)的運(yùn)動(dòng)角速度曲線

圖8 工具末端運(yùn)動(dòng)軌跡圖
3.6 仿真結(jié)果與分析
運(yùn)動(dòng)仿真結(jié)束后,利用ADAMS/Post processor模塊可以得到連桿在任意時(shí)間的關(guān)節(jié)變量值以及任意點(diǎn)的位移、速度和加速度曲線,圖9為工具末端在運(yùn)動(dòng)平面內(nèi)X、Y兩個(gè)方向上的位移、速度和加速度曲線。

圖9 工具末端位移、速度和加速度曲線
4 結(jié)束語(yǔ)
本文對(duì)絕緣子帶電干冰清洗機(jī)器人進(jìn)行了運(yùn)動(dòng)學(xué)分析,得到了運(yùn)動(dòng)學(xué)正解和逆解計(jì)算,為機(jī)器人的運(yùn)動(dòng)控制和軌跡規(guī)劃奠定了基礎(chǔ)。本文利用Pro/E技術(shù)對(duì)零件進(jìn)行三維建模和裝配,然后再將模型導(dǎo)入ADAMS中進(jìn)行仿真分析,這樣既能克服ADAMS軟件三維建模能力差的缺點(diǎn),又能很好地對(duì)機(jī)器人進(jìn)行運(yùn)動(dòng)學(xué)分析,能直觀地觀察到機(jī)器人工具末端的位移、速度和加速度,為以后的清洗過(guò)程控制和運(yùn)動(dòng)學(xué)分析奠定了基礎(chǔ),此技術(shù)的成熟可簡(jiǎn)化產(chǎn)品開發(fā)過(guò)程,縮短開發(fā)周期,減少開發(fā)費(fèi)用和成本,提高產(chǎn)品質(zhì)量。
[1]王瑜,惠建輝.電力設(shè)備帶電絕緣清洗技術(shù)與實(shí)踐[J].洗凈技術(shù),2003,(2):16-19.
[2]牛元會(huì),程光明,楊志剛.D-H坐標(biāo)系下機(jī)械手正向運(yùn)動(dòng)學(xué)分析[J].機(jī)器人技術(shù)2006(7):27-29.
[3]李成偉,贠超.碼垛機(jī)器人機(jī)構(gòu)設(shè)計(jì)與運(yùn)動(dòng)學(xué)研究[J].機(jī)械設(shè)計(jì)與制造,2009,6(6):181-183.
[4]劉清,韓寶玲,羅慶生,黃麟.S7-200可編程控制器在新型智能碼垛機(jī)器人中的應(yīng)用研究[J].制造業(yè)自動(dòng)化,2008,30(7):39-43.
[5]李俄鋒,徐學(xué)林.基于Pro/EADAMS的林木干果采摘臂的運(yùn)動(dòng)仿真分析[J].林業(yè)機(jī)械與木工設(shè)備,2010,38(2):34-36,48.
[6]張?jiān)旗o.Pro/ENGINEER野火5.0中文版從入門到精通[M].北京:電子工業(yè)出版社,2010.
[7]劉愛(ài)敏,韓衍昭,王麗萍.基于Pro/E和ADAMS的齒輪減速器動(dòng)力學(xué)仿真[J].煤礦機(jī)械,2011,(9):47-49
[8]徐東濤,孫志禮.基于ADAMS的平動(dòng)機(jī)構(gòu)運(yùn)動(dòng)軌跡的規(guī)劃與驗(yàn)證[J].機(jī)械與電子,2010,(9):59-62.
[9]李增剛.ADAMS入門詳解與實(shí)例[M].國(guó)防工業(yè)出版社,2006.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
