基于軸矩限幅控制的機械諧振抑制技術
2015-08-02 03:54:26楊明王璨徐殿國
電機與控制學報 2015年4期
關鍵詞:系統
楊明, 王璨, 徐殿國
(哈爾濱工業大學電氣工程系,黑龍江哈爾濱150001)
基于軸矩限幅控制的機械諧振抑制技術
楊明, 王璨, 徐殿國
(哈爾濱工業大學電氣工程系,黑龍江哈爾濱150001)
為了探究伺服驅動系統中,由于機械傳動裝置有限的剛度而引發的機械諧振現象,甚至當振幅較大,超過軸系所能承受的最大轉矩范圍而引發系統安全問題,在雙慣量彈性系統模型基礎上,研究速度環控制器的4種不同實現方法的控制性能,即工程設計法、極點配置法、軸矩狀態反饋法設計的PI控制器和模型預測控制器。通過4種方法的仿真結果,分析了相應的控制效果,同時驗證了模型預測控制為最優的控制策略:在抑制機械諧振的同時,可以在保證系統快速動態性能的基礎上,對軸矩實現任意限幅功能,從而加強系統運行的安全性。
伺服驅動系統;機械諧振;軸矩限幅;模型預測控制
0 引 言
伺服驅動系統的機械傳動部分經常使用到傳動軸、變速器、聯軸器等傳動裝置連接電機和負載,而實際傳動裝置并不是理想剛體,存在一定的彈性,通常會在系統中引發機械諧振。機械振蕩除了會發出聲學噪聲形成噪聲污染外,還會對機械傳動裝置造成嚴重的損害,影響其使用壽命[1]。特別地,驅動系統綜合控制分析時經常忽略機械連接的扭轉特性,這一點會嚴重影響驅動系統的轉矩傳輸特性并給彈性軸帶來較大的偏角振蕩[2-3]。在長期振蕩工作狀態下,或是振蕩較強超過軸的承受范圍時,會使整個系統的性能下降,減損軸的壽命,造成斷軸等嚴重的生產事故。因此,有效抑制機械振蕩以及優化傳動裝置運行的方法已經成為提高伺服驅動系統性能的重要課題。
避免機械諧振的方法有很多,大致分為2類:被動方式和主動方式。被動方式為在速度環輸出與電流環給定之間插入陷波濾波器,而控制系統其他設計不變;主動方式為主動改變控制其參數或結構來消除諧振的影響,可分為單純PI控制(雙自由度PI控制、RRc)、基于PI的狀態反饋控制、其他高級算法等等多種方案。然而,這些控制方法中卻只有一小部分將驅動系統中狀態變量的物理及安全極限考慮在內。
目前,國內外在抑制軸矩振蕩及其限幅的工作中主要體現為以下幾種策略:
若想提高系統某個狀態變量的響應性能,可通過該狀態變量的相應反饋來實現。于是,以提高軸矩狀態響應為目的,文獻[4]針對P控制器與PI控制器,結合狀態電機負載轉速差與軸矩反饋策略使系統負載速度振蕩有所下降,同時對交軸電流產生一定的限幅作用。文獻[5]在軸矩狀態反饋及電機負載轉速差狀態反饋的基礎上增加擾動轉矩及其微分形式的反饋,以補償系統的零點,提高系統的抗擾性能。
然而,雖然狀態反饋一定程度上對系統某些狀態變量產生一定限幅作用,但不能同時保證系統的動態性能,因此需適當引入高級算法。文獻[6]在驅動系統運行時某些變量受到的物理及安全限制問題提出了一種新的策略。該方法為速度控制器引入一個魯棒的預測補丁。此補丁的精髓在于在一組容許的狀態變量范圍內計算最大魯棒控制變量集[7],在此變量集內實現對系統內所有存在安全極限的變量幅值的控制。
在限制驅動系統狀態變量幅值控制中最常見的方法是MPc算法。雖然已有一些業內人士將預測控制實用于電力驅動系統中速度、轉矩、電流、磁通量等狀態控制中,但焦點卻很少能集中在多慣量驅動系統中。文獻[8]采用MPc對被控對象的速度控制器輸出進行優化,結果表明,當負載側轉動慣量變化時,適當選擇MPc的系統權重矩陣,可使負載速度獲得穩定的響應及較好的振蕩抑制效果。文獻[9-11]利用卡爾曼濾波器觀測出系統其他狀態變量,進而實施MPc策略,使系統可在負載慣量變化較廣的范圍內保證電磁轉矩、軸矩與負載轉速在安全運行時滿足魯棒控制。此外,系統可將軸矩狀態限定在任意值,并在保證不影響系統動態特性的條件下獲取“準時間最優控制”。文獻[11]對傳統的MPc與Explicit MPc(EMPc)進行對比,并指出雖然二者在數學算法中是等價的,但后者可進行實時計算,因此實現起來更快更可靠。
本文針對伺服驅動系統中由彈性傳動軸系引起的機械諧振及軸系安全性進行研究。首先建立系統模型,并對基于PI和MPc的傳動系統分別設計。其中PI控制器的設計包括3種,即工程法、極點配置法和軸矩狀態反饋法。突出貢獻在于在軸系安全性問題上對比分析了4種方法的不同控制效果。最終,理論分析和仿真實驗驗證了MPc的優越性。
1 雙慣量彈性系統建模
實際工業應用中,數控加工設備的機械結構等許多伺服驅動系統均可簡化為雙慣量彈性系統,模型圖如圖1所示。
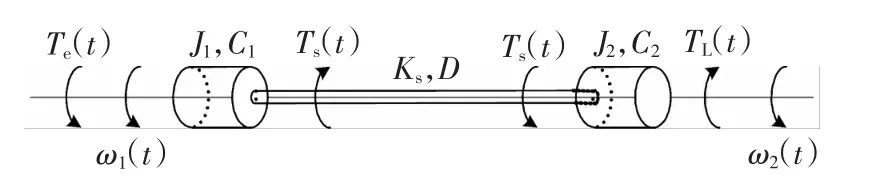
圖1 雙慣量系統結構圖Fig.1 Schematic diagram of the two-mass flexible system
電機和執行機構通過傳動軸系連接,傳動軸系具有一定的抗扭剛度Ks且其阻尼系數為D。當傳動軸系發生扭轉形變時軸系將產生轉矩Ts,轉矩的大小受到軸系電機端與執行機構端旋轉角的差值,和軸系的機械阻尼影響。伺服驅動器控制電機運行,為電機的轉軸提供電磁轉矩Te。電機端電磁轉矩Te和傳動軸系轉矩Ts作用于轉動慣量為J1、阻尼系數為C1的電機轉軸,對其速度產生影響。在執行機構端,執行機構具有大小為J2的等效轉動慣量以及阻尼系數C2,傳動軸系轉矩Ts與負載轉矩TL共同作用于執行機構最終決定了執行機構的轉速。
根據以上理論分析,建立如下微分方程組:
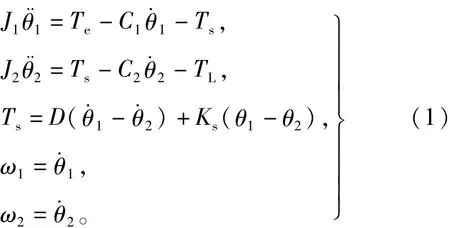
為了進一步分析機械模型,需要對以上微分方程組進行拉普拉斯變換,同時忽略對系統影響較小的阻尼系數。由此可得化簡后的雙慣量彈性系統框圖如圖2所示。其中ωr代表系統給定轉速。
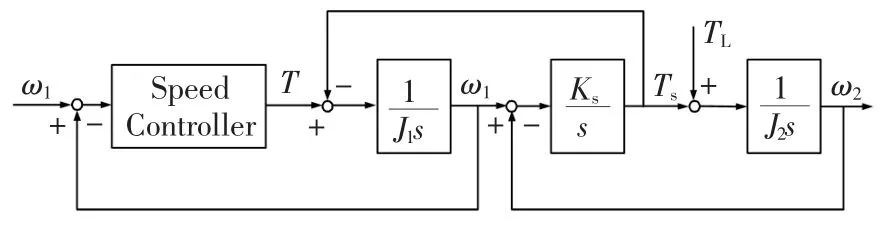
圖2 雙慣量彈性系統結構框圖Fig.2 Block diagram of the two-mass flexible system
2 MPC法抑制機械諧振、限制軸矩狀態幅值
模型預測控制又稱為滾動時域控制,是近年來被廣泛討論的一種反饋控制策略。
預測控制起源于工業界,意在解決PID控制不易解決的多變量約束優化控制問題。MPc適用范圍非常廣泛,可以處理時變或者非時變、線性或者非線性、有時滯或者無時滯的系統的約束最優控制問題。
2.1 MPC原理
以熟悉的狀態空間模型為例,作為可以預測系統未來動態的模型。線性離散化狀態方程,為

圖3所示為MPc預測原理圖,圖中r(.)為系統的給定指令,y(p)為系統輸出,Np與Nu分別表示預測時域與控制域大小,u為系統的控制輸入。在當前時刻k,從被控系統得到測量值y(k)。
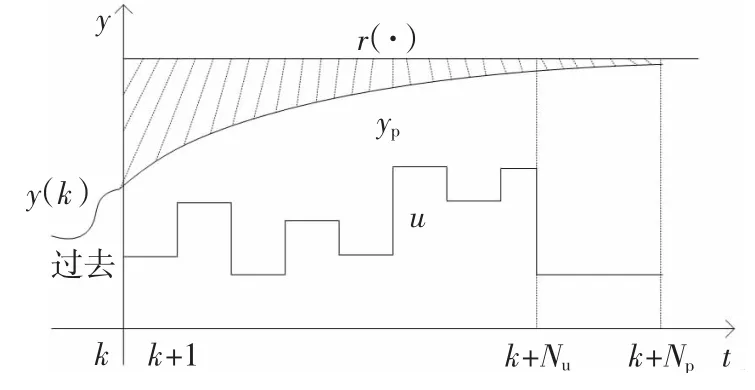
圖3 模型預測控制原理圖Fig.3 Schematic diagram of MPC
控制目標是尋找最優的控制輸入,使系統輸出y(p)與期望的輸出,即參考輸入{r(k+1),r(k+ 2),…,r(k+Np)},越接近越好,即圖3中的陰影部分面積最小,同時滿足系統的控制約束和輸出約束:

為此,用預測輸出與期望輸出之間的累積誤差定義一個最簡單的優化目標函數:
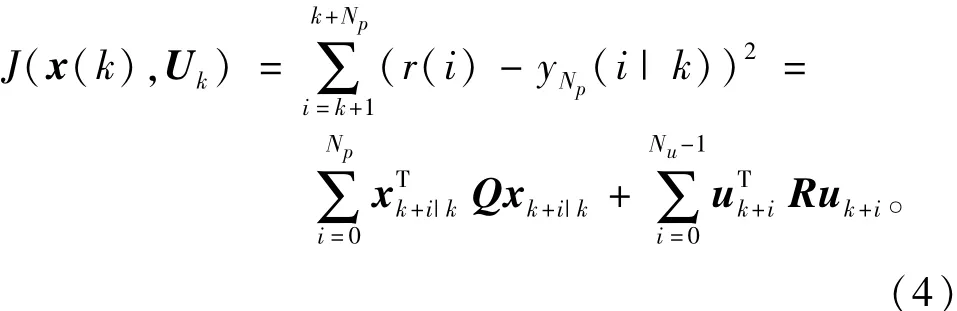
那么,“尋找最佳控制輸入”的問題可以描述為如下的優化控制問題。
于是,預測控制的基本原理可以概括為:在每個采樣時刻用最新得到的測量值刷新優化問題1,將得到的優化解的第一個分量u*(k|k)作用于系統,如此循環往復至永遠,即k→∞。
將x=Axk|k+BU帶入式(4)中,MPC問題可轉化為求解下面的二次規劃QP問題:

其中,向量H、F、Y與狀態方程向量A、B有如下關系:H=BTQB+R,F=ATQB,Y=ATQA。同時,矩陣G、W、E也可從式(4)、式(5)中得到。最優解表示問題(5)對參數x的最優控制變量。
為了在實際系統中實現MPc,需考慮計算的快速性,因此須將其做算法的簡化,減小計算量,從而設計出實際中可應用的簡化MPc控制器(EMPc)。
引入變量z=U+H-1FTx(k),優化問題(5)可轉化為如下形式:

其中矩陣S=E+GH-1FT。于是,式(5)描述的二次時不變系統約束最優化控制問題便轉化成了式(7)標準二次最優化問題。此問題可應用KKT條件[12]結合求解QP問題的積極集法便可得到EMPc離線過程的最優解,即得到狀態分區級響應狀態分區上的控制率,保存這些數據,供EMPc在線過程使用。
2.2 基于雙慣量彈性系統的MPC設計
以上分析了模型預測控制的原理及實際中的算法過程。該節針對雙慣量彈性系統設計簡化的MPc控制率,以達到諧振的抑制及較好的軸矩狀態限幅功能。基于MPc的系統框圖如圖4所示。
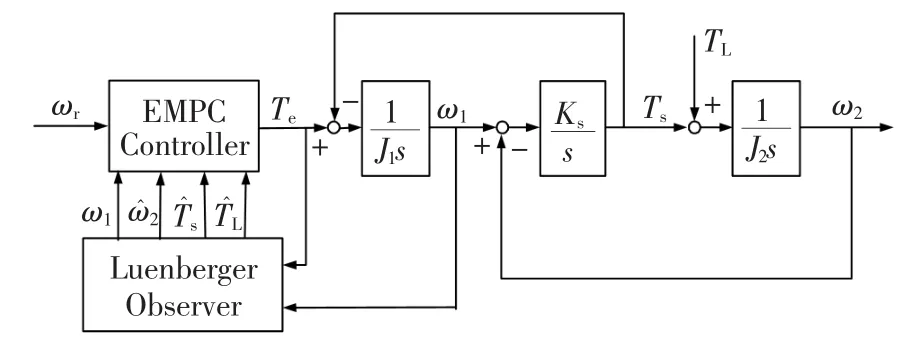
圖4 基于簡化MPC的雙慣量系統框圖Fig.4 Two-mass drive system control structure w ith exp licit MPC
該模型下的滾動預測過程可描述如下:首先,在當前時刻用觀測器觀測到的系統負載轉速、軸矩、負載轉矩和系統給定速度、電機速度提供給MPc控制器,MPc控制器通過計算評價函數,得到控制量Te含Np個分量的優化序列,將第一個分量u*(k|k)作用于系統,從而完成第一次滾動控制。在下一個采樣時刻,循環此過程至k→∞。然而該過程的計算量非常大,導致控制器失效,因此,將MPc轉化為EMPc,先離線計算系統所有的輸入與狀態所對應的輸出,系統實際運行時只需查表就可找到最優的控制序列。
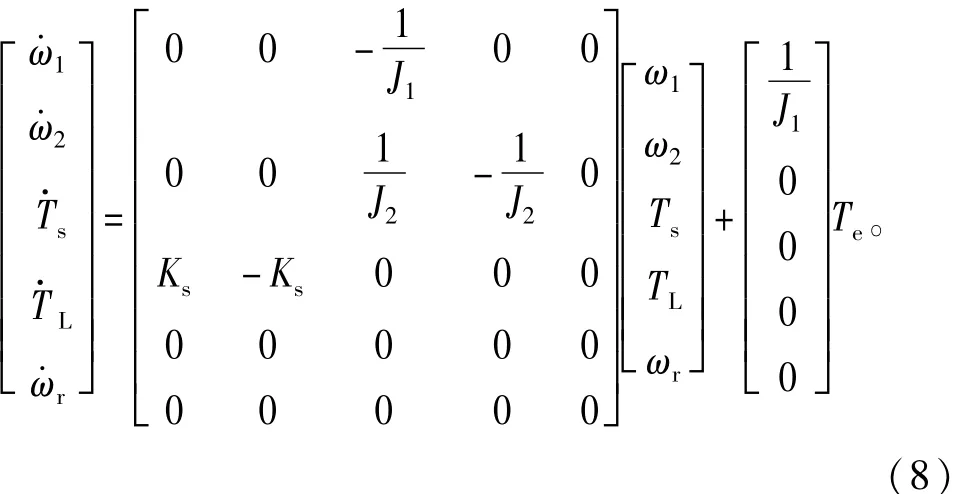
為了計算EMPc控制率并滿足對系統狀態和控制量的約束性,設計帶有額外狀態變量的增廣系統模型(8),其考慮了突加負載及給定轉速的影響。
為了保證系統運行時電磁轉矩不超過最大允許值,需設定其輸出范圍,ˉTe為電磁轉矩輸出的臨界值,可根據需要相應設置。

此外,為有效地防止系統在暫態運行時,傳動軸系過為強烈的扭轉振蕩。傳動軸系所能承受的最大扭轉力應不超過軸系的最大允許扭轉力極限和軸系所用材質的輸出要求極限,因此,需設置下面保護限幅:

這里,ˉTs為任意設置參數,可被用于評定MPc控制策略的限幅能力與隨后產生的閉環響應性能。
在選擇MPc控制域和預測域時,雖然較大的預測域意味著主要的系統動態均可在預測窗中體現,但同時會給系統帶來大量的控制作用,增加了算法的復雜程度。本文的仿真中設置采樣時間為0.5ms,折中考慮系統的動態性能與計算量的可實現性,最終將預測域與控制域設置為

較好的選擇目標函數中的狀態權重與控制量權重,可以在目標達到的基礎上,更好的規劃系統的性能。本文按照目標重要性排序,設計速度權重比例大于軸矩權重。此外,目標函數中狀態的權重可轉化為輸出量y的權重,輸出量定義如下:

目標函數中的權重系數設置如下:

3 四種策略的仿真驗證
仿真中所使用的永磁同步伺服系統主要參數如下:電機額定功率800W,額定轉矩4 N.m,額定轉速200 rad/s,電機軸轉動慣量1.1 e-3N.m2,傳動軸彈性903 N.m/rad,負載慣量2.8 e-3N.m2,系統抗諧振頻率90.4 Hz,自然諧振頻率170.3 Hz。
系統給定10%和100%額定轉速;電磁轉矩限幅為3倍額定轉矩;突加負載類型為摩擦型轉矩,大小為4 N.m。根據以上參數對系統進行仿真實驗。
首先將速度控制器用PI控制器實現。分別利用工程法、極點配置法與軸矩狀態反饋法設計控制器。
所謂工程法,即在純剛性系統,不考慮傳動軸彈性的情境下設計的PI參數,仿真如圖5所示。
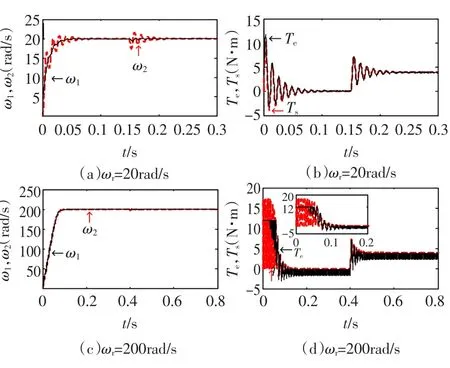
圖5 工程法實現的雙慣量系統階躍響應Fig.5 Simulation transients of the two-mass drive system corresponding to engineering design method
此時,系統振蕩較為強烈,且軸矩的幅值已超出軸系最大承受范圍。因此引入極點配置法,試圖在考慮彈性的基礎上改善系統性能。
電機給定轉速到負載速度的傳遞函數為
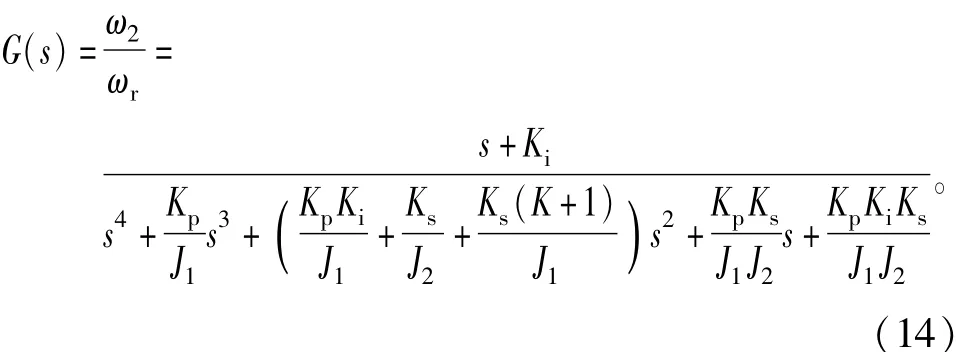
G(s)分母中存在4個極點,配置為

由于相同阻尼系數的極點配置法在實際應用中更廣泛,選擇該方法優化PI控制器參數,令ζ1=ζ2= 0.707(極點設置在與負實軸呈45。角的虛線上),極點分布如圖6所示。相應仿真如圖7所示。

圖6 相同阻尼系數的極點分布圖Fig.6 Distribution of poles w ith identical damping
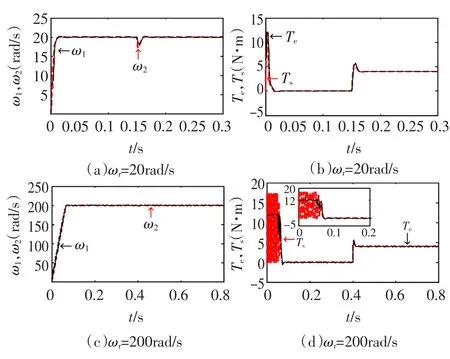
圖7 極點配置法得到的轉速、轉矩階躍響應Fig.7 Simulation transients of the two-mass drive system corresponding to pole-placementmethod
雖然振蕩現象有了明顯的抑制效果,但軸矩幅值仍然很大,無法保證系統安全。為改善軸矩響應,使系統安全運行,下一步采用軸矩狀態反饋方式,通過對反饋系數K的調節,來增加系統極點參數的自由度,從而提高系統動態性能。系統框圖如圖8所示。
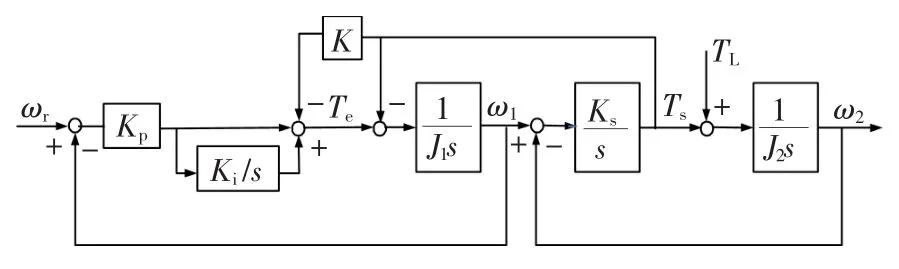
圖8 基于軸矩狀態反饋的PI控制雙慣量系統框圖Fig.8 Two-mass drive system control structure based on shaft torque feedback method
與無反饋的控制結構相比,增加軸矩狀態反饋后,系統兩對共軛極點中其中一對的自然角頻率可根據需要設置為任意值。仿真結果如下圖所示。
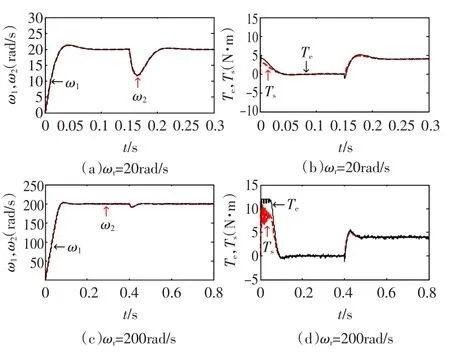
圖9 軸矩狀態反饋法得到的轉速、轉矩階躍響應Fig.9 Simulation transients of the two-mass drive system corresponding to shaft torque feedback method
此時,雖然系統可安全運行,但動態性能較差,因此,利用MPc法試圖改善系統動態性能。
MPc可以使軸矩響應以任意幅值限幅,保證系統安全性的同時,得到最佳的動態響應。理論上可以使系統的極點任意配置,從而獲得最優動態響應。
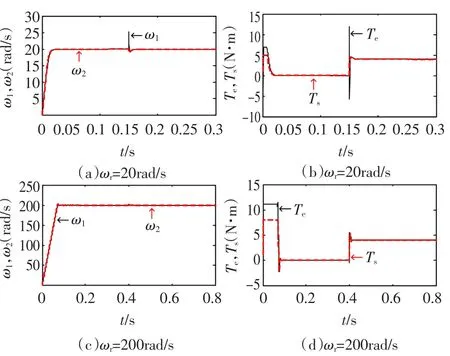
圖10 MPC法得到的轉速、轉矩階躍響應Fig.10 Simulation transients of the two-mass drive system corresponding to MPC method
圖10(a)(b)中,當給定轉速較小,由于電磁轉矩穩定工作在線性區域,沒有達到限幅值,因此設定軸矩限幅ˉTs≤5;圖(c)(d)由于給定轉速較大,電磁轉矩以恒定限幅值飽和工作,設定ˉTs≤8,從而較明顯的看出MPc對帶有限定條件的系統的有效性。
針對MPc對軸矩的任意限幅功能,通過依次將限幅值設定為5,7,9,11 N.m的情況,如圖11所示。MPc法在實現機械諧振抑制的同時,以設定的軸矩限幅值驅動負載,增強了傳動軸系的安全性。
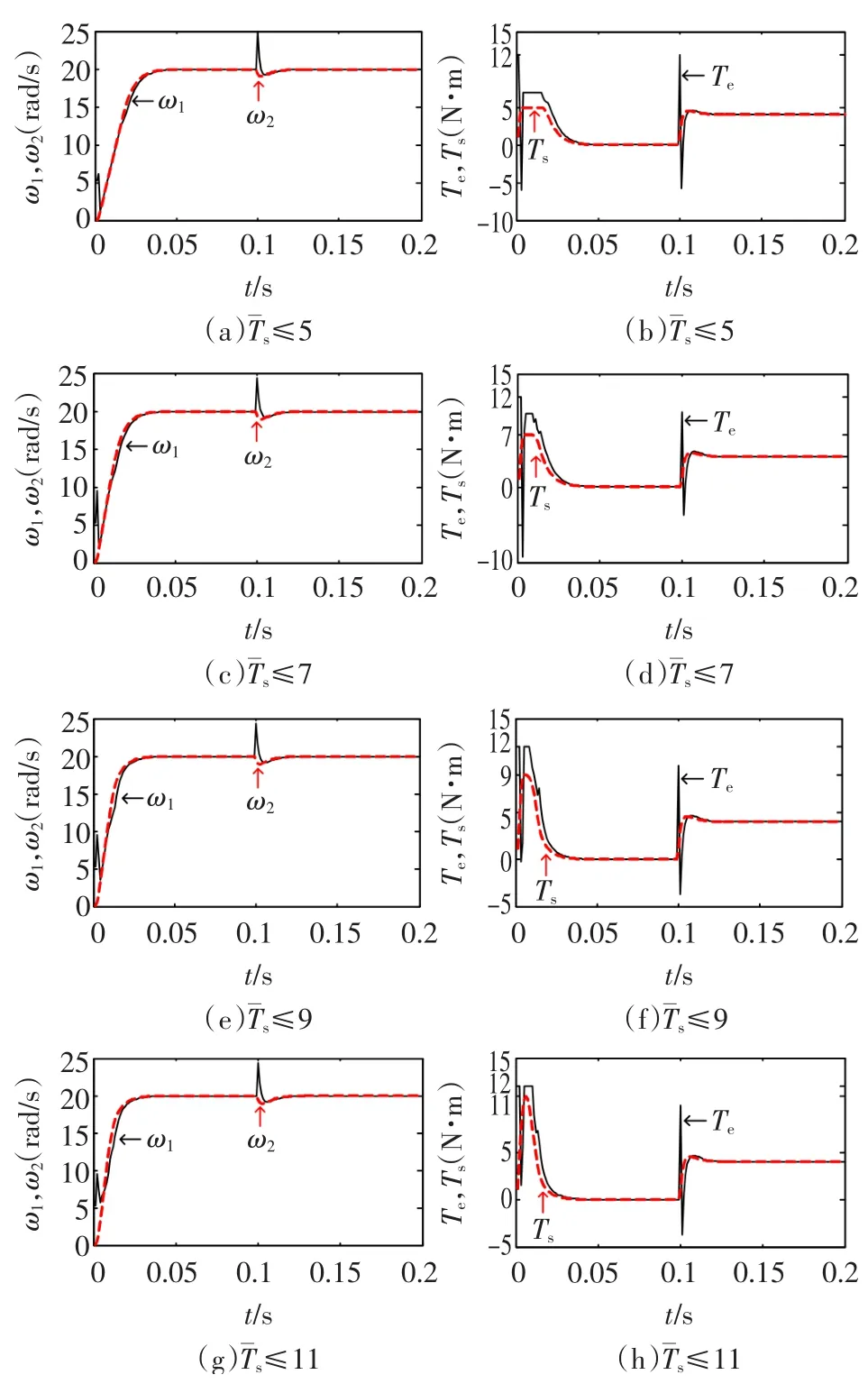
圖11 MPC法實現的軸矩任意限幅Fig.11 Random torque amplitude lim iting control based on M PC
此外,由圖10與圖11可知,系統突加負載時,速度與轉矩波形均會出現尖峰,其原因在于所設計的MPc控制器根本優勢在于實現快速速度跟蹤與軸矩限幅。而相對于電機側速度與電磁轉矩,提高負載端速度與軸矩的動態響應才是實際系統追求的根本所在。因此,電機側的狀態量會提前做出預判,出現尖峰,帶動負載側響應,從而使負載側速度能夠快速跟蹤給定,軸矩實現限幅功能。
輸入信號變為幅值100 rad/s,頻率60 rad/s的正弦信號,軸矩反饋法與MPc法對應的速度與轉矩波形分別如圖12(a)(b)與圖12(c)(d)所示。
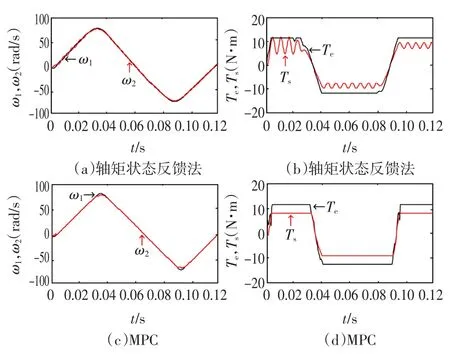
圖12 軸矩狀態反饋法與MPC法得到的轉速、轉矩正弦響應Fig.12 Sinusoidal responses of the two-mass d rive system
對比可知,軸矩狀態反饋法只能一定程度上限制軸矩幅值,而MPc法可在實現軸矩限幅的同時,使軸矩相應平滑不振蕩,保證系統的快速動態響應。
綜上所述,4種策略的優缺點對比如下。
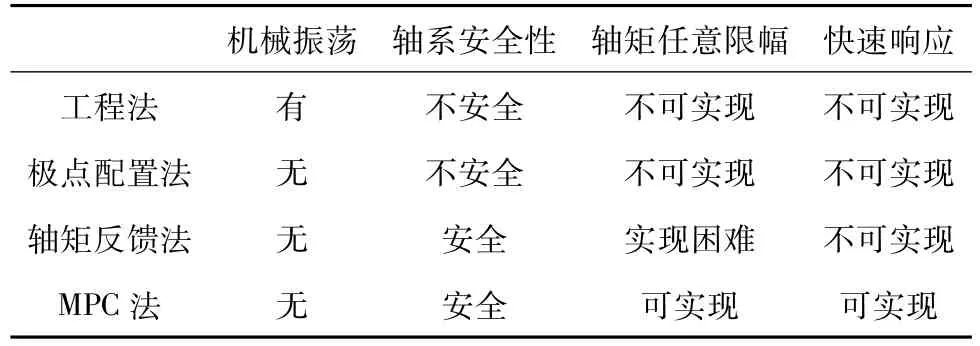
表1 4種策略的優缺點對比Table 1 The advantage and disadvantages of the four strategies
4 結 論
本文針對伺服驅動系統中由于彈性傳動裝置引發的機械振蕩及軸系的安全問題,研究了4種解決方案,其性能對比如表1所示。本文的突出貢獻在于在軸系安全性問題上對比分析了4種方法的不同控制效果。工程設計法只能在純剛性系統下抑制系統諧振現象;相同阻尼系數的極點配置法可以在一定程度上抑制彈性系統的機械諧振現象,但軸矩幅值會超過軸系所能承受的最大轉矩;在此基礎上增加軸矩狀態反饋,能夠成功降低了軸矩幅值,但軸矩響應仍然振蕩;MPc法可在抑制機械諧振、實現軸矩任意限幅的同時,保證系統快速的動態性能。最終,理論分析和仿真實驗驗證了MPc的優越性。
MPc策略的有效性,使我們設想下一步是否可以在此基礎上研究考慮間隙的三慣量系統機械諧振的抑制與軸矩的限幅控制。
[1] 楊明,胡浩,徐殿國.永磁交流伺服系統機械諧振成因及其抑制[J].電機與控制學報,2012,16(1):79-84. YANG Ming,HU Hao,XU Dianguo.cause and suppression of mechanical resonance in PMSM servo system[J].Electric Machines and control,2012,16(1):79-84.
[2] QIN S J,BADGWELL T A.A survey of industrialmodel predictive control technology[J].control Engineering Practice,2003,11(7):733-764.
[3] WU Y,FUJIKAWA K,KOBAYASHIH.A torque controlmethod of two-mass resonant system with PID-P controller[c]//1998 5th InternationalWorkshop on Advanced Motion control,June 29-July 1,1998,coimbra.1998:240-245.
[4] BAHR A,BEINEKE S.Mechanical resonance damping in an industrial servo drive[c]//2007 European conference on Power E-lectronics and Applications,Sept2-5,2007,Aalborg.2007:1 -10.
[5] SZABAT K,ORLOWSKA-KOWALSKA T.Optimization of the two-mass drive dynamics using different compensation feedbacks[c]//2008 11th International conference on Optimization of E-lectrical and Electronic Equipment(OPTIM),May 22-24,2008,Brasov.2008:19-24.
[6] VASAK M,PERIc N.Robust invariant set-based protection of multi-mass electrical drives[J].The International Journal For computation And Mathematics In Electrical And Electronic Engineering,2010,29(1):205-220.
[7] VASAK M,PERIc N.Protective predictive control of electrical drives with elastic transmission[c]//13th International Power E-lectronics and Motion control conference EPE-PEMc 2008,Sept. 1-3,2008,Poznan.2008:2235-2240.
[8] c Yc HOWSKIM,DO c,SERKIESP,et al.Position tracking in electrical drives with elastic coupling using model predictive control[c]//IEcON 2010-36th Annual conference of the IEEE Industrial Electronics Society,Nov.7-10,2010,Glendale,AZ. 2010:956-961.
[9] SZABAT K,SERKIES P,c YcHOWSKIM.Application of the MPc to the robust controlof the two-mass drive system[c]//2011 IEEE International Symposium on Industrial Electronics(ISIE),June 27-30,2011,Gdansk.2011:1901-1906.
[10] SZABAT K,SERKIES P,ORLOWSKA-KOWALSKA T,et al. Robust torque constraints handling in drive systems with elastic transmission[c]//2010 IEEE International conference on Industrial Technology(Ic IT),March 14-17,2010,Vi a del Mar. 2010:398-403.
[11] c Yc HOWSKIM,SZABAT K,ORLOWSKA-KOWALSKA T. constrained model predictive controlof the drive system withmechanical elasticity[J].IEEE Transactions on Industrial Electronics,2009,56(6):1963-1973.
[12] BEMPORAD A,MORARIM,DUA V,et al.The explicit linear quadratic regulator for constrained systems[J].Automatica,2002,38(1):3-20.
[13] ZHANG G.Speed control of two-inertia system by PI/PID control[J].IEEE Transactions on Industrial Electronics,2000,47 (3):603-609.
(編輯:劉素菊)
Mechanical resonance suppression strategy based on shaft torque amplitude lim iting control
YANGMing, WANG can, XU Dianguo
(Dept of Electrical Engineering,Harbin Institute of Technology,Harbin 150001,china)
In servo-drive systems,the stiffness of transmission mechanism is limited which will lead to mechanical resonance and if the oscillation amplitude is larger than the tolerance that the shaft can withstand,itwill lead to the system safety problems.In order to study these problems,based on themodel of two-mass elastic system,the four design schemes of speed controller were analyzed.They are engineering design method,pole placementmethod and shaft torque state feedback,all ofwhich are all based on PI controller andmodel predictive controller.control effects of the four strategieswere compared by the simulation results.Model predictive controllerwas verified as the optimal control strategy which can suppress mechanical resonance successfully.Moreover,based on the fast dynamic performance,the function of shaft torque limit at arbitrary value can be achieved to strengthen the operating safety of the system.
servo system;mechanical resonance;shaft torque amplitude limiting control;MPc
10.15938/j.emc.2015.04.010
TN 911.22
A
1007-449X(2015)04-0058-07
2014-03-12
國家自然科學基金(61273147)
楊 明(1978—),男,副教授,研究方向為交流伺服系統與智能控制;王 璨(1989—),女,碩士研究生,研究方向為交流伺服系統;徐殿國(1960—),男,教授、博士生導師,研究方向為電力電子與電力傳動、電機驅動控制、電網統一品質控制。
楊 明
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32