基于二進制編碼的新型定位系統的設計與研究
2015-09-13 11:56:16王福明郭彥青
制造業自動化 2015年22期
張 強,王福明,郭彥青
(中北大學 機械與動力工程學院,太原 030051)
0 引言
在工業生產中,實時、準確地獲得生產設備的位置信息是車間安全、有效運行的保障。以行車為例,行車定位的基本功能是在任何時刻、任何地方都能精確確定行車的具體位置,如何精確地檢測行車的位置以對行車進行控制是企業生產系統的核心。在現階段的工業生產中大多采用增量式編碼進行定位,這種定位方式一旦傳感器信號線虛接,將使槽號混亂,導致產品廢品率增加,安全性與可靠性大大降低。本文介紹一種新型編碼方式進行位置定位,可對行車位置進行準確定位以滿足智能化、一體化的行車控制和調度指揮,這種新型編碼方式采用純二進制絕對編碼方式,結構簡單,控制方便,準確度高,從而更加有效地提高行車效率和安全性。
1 系統的工作原理
1.1 設計思路
目前的車間行車系統在運行時,行車對所有位置的識別只有一個接近傳感器。每一次運行時,必須將行車移動到起始端,通過計數方式來識別當前位置,當遇到突然斷電或者中途切斷電源,那么下一次開啟時必須從初始位置開始,非常不便,且故障率極高,其定位也不準確,給企業生產制造帶來極大的影響,為保證工藝執行的可靠,于是有了位置識別采用絕對定位方式構思。
1.2 基本原理
這種方法的基本原理是將二進制的8421碼作為行車在每個位置的號,不同的位置對應著唯一的一組二進制編碼數字,如表1所示。這樣,在數字為1的位置放置一鐵片,數字為0的位置不放鐵片,當行車經過或停在某一位置時,對應的一組數字就會被檢測裝置讀取,經過控制電路絕定行車的下一個動作。這就解決了增量式編碼方式每次運行需退至初始位置的麻煩。基本定位方案如圖1槽號的準確定位對工藝的順利開展至關重要,為確保定位的準確,每次運行前,均進行定位傳感器的故障診斷操作,確保當前操作時定位傳感器能正常工作。
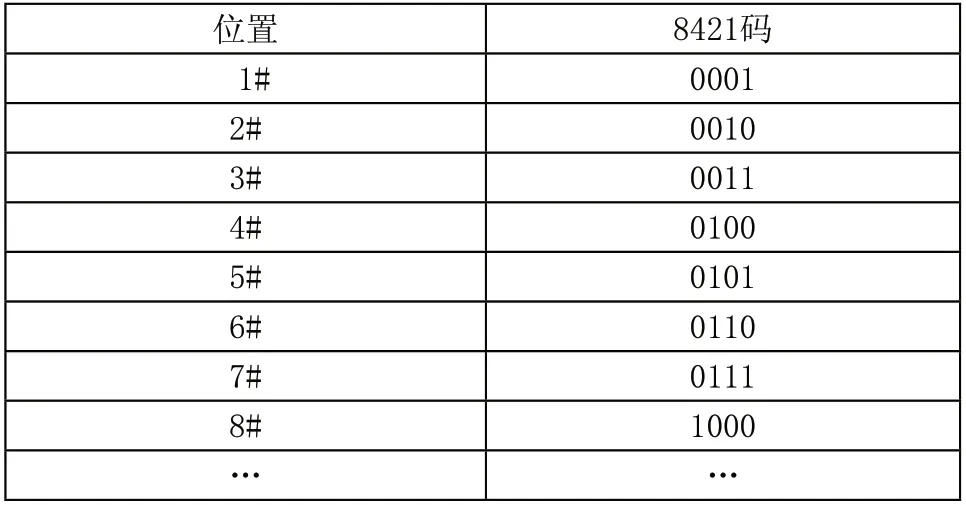
表1 行車位置編號對應的編碼數字

圖1 槽號絕對定位方案
1.3 檢測裝置結構設計
檢測裝置采用n個光電傳感器并排放置,為防止信號干擾,兩兩之間距離不小于100mm,三個傳感器可以檢測8個位置,四個傳感器可以檢測16個位置,以此類推,n個傳感器可以檢測2n個位置,如圖2所示,表示檢測到二進制編碼“11111”代表數字“31”,即32號位置,此圖列舉了5個傳感器(下文同)定位32個位置的結構設計圖,在行車對應的各個位置都安裝此裝置,根據位置號數的不同增減鐵片的個數,也可根據需求增加傳感器個數來增加所需定位位置個數。
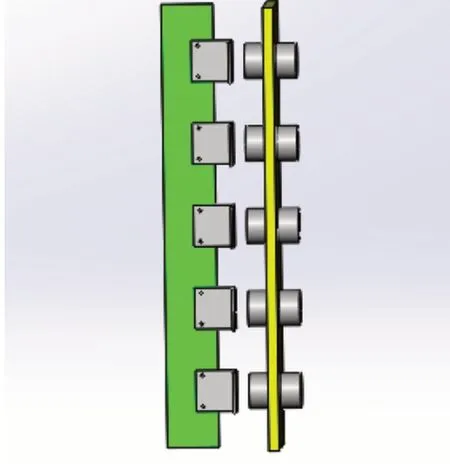
圖2 檢測裝置結構設計圖
2 系統的控制電路設計
2.1 定位系統控制方案
為實現行車定位的自動化控制,此編碼定位裝置采用繼電器與PLC并行控制系統,本例采用S7-200PLC控制電路,通過PLC接收上位機指令后,經輸入端把指令下達給行車,利用接近開關控制行車的升降啟停,實現了系統手自雙控的效果,使產品可以不間斷的生產,提高了企業的生產效率。
2.2 定位系統檢測反饋電路
當行車運行過程中,傳感器感應鐵片獲取檢測信號,此信號為一組二進制編碼經過PLC譯碼成為真實的位置編號。再直接傳遞給上位機進行判定。在PLC存儲中,一個字有2個字節,一個字節有8位,用一個字節即可存儲28個位置編號,所以選取PLC輸入端的一個字節連接五個傳感器。電器原理圖如圖3、圖4所示。
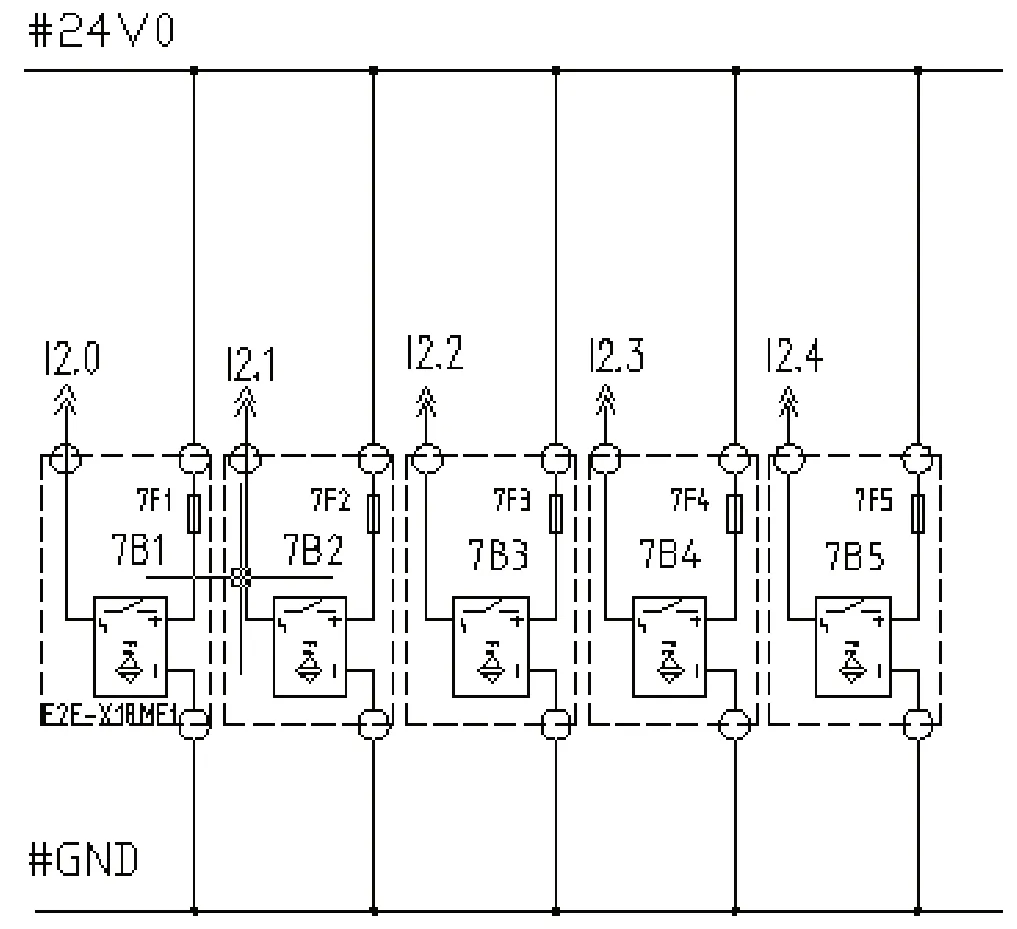
圖3 傳感器接線原理圖
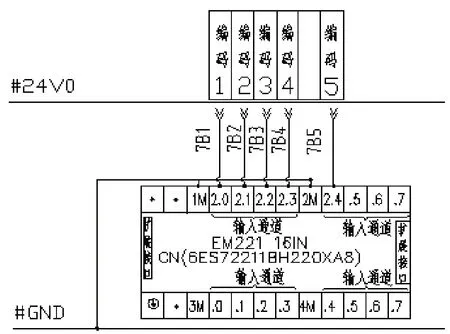
圖4 PLC接收信號原理圖
3 故障分析與修正
3.1 系統使用前的故障檢測
在行車上固定5個接近開關,接近開關隨著行車一起運動,行車工作時,絕對定位接近開關首先經過“傳感器故障檢測”響應塊,如果接近開關信號有交替變化現象,則認為該傳感器工作正常,如果有接近開關響應無變化,則可認為該傳感器工作不正常,從而給出傳感器故障提示信息,并提示維護人員進行維修。當接近開關工作正常時,通過絕對編碼響應塊的解析,即可確定行車的位置。
3.2 信號保持問題
在行車運行過程中,需要時刻在上位機中監視到行車所在的位置編號,這就要求絕對編碼裝置所檢測到的信號一直保留,知道下一組信號被檢測到才會更新,而上述設計的絕對編碼系統只能在當前位置時才會顯示對應位置編號,當行車離開被檢測裝置時,由于信號未被檢測到而導致信號中斷,在上位機顯示的位置編號也變為0。如圖5所示。針對這一問題,在PLC讀取信號端添加上升沿符號,使得位置編號可以保留到下一個信號觸發。
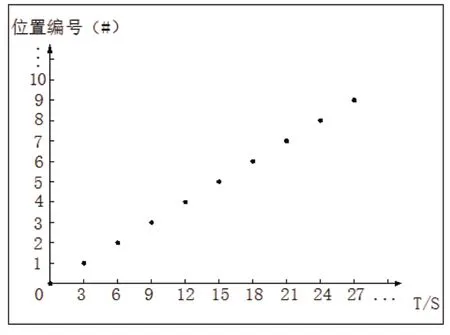
圖5 信號中斷圖
3.3 硬件故障問題
在進行絕對定位過程中,可能會由于運行時間過長,設備更新較晚,導致傳感器出現故障,這就會導致在定位過程中直接獲取了錯誤的位置編號,造成行車運行紊亂,影響了企業的生產效益。為了解決這一問題,此系統結合了增量式編碼方式簡單不易損壞的優點對二進制絕對編碼進行實時修正,一旦檢測到編碼傳感器故障信號自動切換到增量編碼方式計數方式,這樣,保證了產品可以繼續生產,產品合格率也不會由于傳感器故障而降低。增量式編碼方式與絕對編碼方式相結合的編碼方法是本次設計的一大突破,使得定位系統的穩定性大大提高。
3.4 防抖動問題
定位系統的防抖動問題是本次設計的關鍵,一個系統的穩定關鍵在于其受到外界干擾時能否保持一個良好的狀態,讀取準確的數據,在本次設計中經過無數次的試驗得出定位系統的抖動問題大致可以分為兩類:一類為行車停止時的抖動問題;第二類是行車行走過程中的抖動問題。
第一類抖動問題發生在行車定位停止時,由于慣性原因導致行車停車不穩定而產生輕微的車身抖動,從而引起定位裝置的抖動,造成信號采集短暫性混亂,如圖6所示,行車在4號位置停止,信號發生抖動,待行車停穩后信號又會恢復正常。信號暫時的紊亂影響上位機的監控,上位機接收新的位置編號數據會繼續發出新的命令造成行車啟動。嚴重影響操作者的安全和系統的穩定。針對這一問題采取了通電延時計時法,即當行車停止運行時,信號不會馬上采集當前位置信號,而是在停止后計時3秒,此時行車已經停穩再讀取位置信息,此時上位機得到的位置編號方可保證是正確的信息。
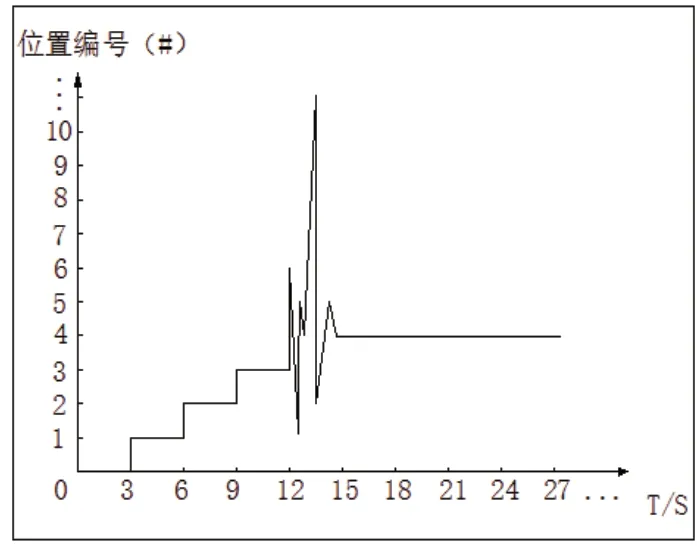
圖6 信號抖動圖
第二類抖動問題發生在行車運行過程中由于周圍環境的影響使得行車發生輕微抖動,在大多數情況下這種情況是可以忽略的,但是當遇到大的振動影響行車的信號采集還是會受到一定的影響。如行車在五號位置行車發生抖動,信號采集到的數據可能會是8,行車繼續往前走,到6號位置時行車又恢復到正常情況,如圖7所示。這種狀態下雖然不影響行車的運行,但是上位機監控會出現混亂,造成監控者的判斷失誤。而當行車的目標位置就在受影響的位置時更會對行車停止位置做出錯誤的判斷,造成行車定位不準,影響產品的生產。針對這一問題,在此系統中添加判斷,當采集到的數據出現突然跳變,而不是一一遞增,則判定編碼器故障,此時據對編碼需要用增量式編碼方式進行修正。這樣就確保了行車的穩定運行。修正后平穩準確的信號,如圖8所示。
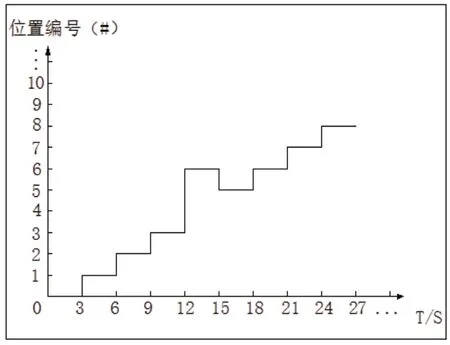
圖7 信號跳變圖

圖8 信號穩定圖
4 軟件設計
在進行定位系統的軟件設計時,首先,在保證行車可以精確定位的前提下,還必須考慮到環境對系統的影響;其次,系統應做好足夠的安全防護措施,保證發生突發情況時操作者的人身安全,對各種可能發生的故障應添加報警信號功能;最后,定位系統應做到持久耐用,穩定可靠。基于以上情況的考慮,本設計從以下幾個方面進行軟件設計。為方便行車的控制,將行車系統設計為現場執行系統,完全受主控系統控制。每個行車系統通過接受主控系統的指令實現產品的傳遞和位置定位。整個行車系統包括:主調度模塊、手動控制模塊、停車控制模塊、運行保護模塊、槽號定位模塊、時間計算模塊等,各模塊的關系如圖9所示。
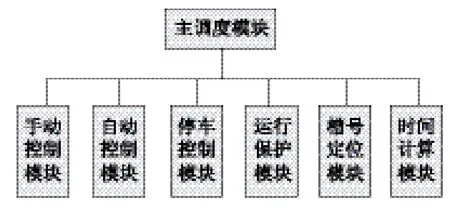
圖9 行車控制模塊結構圖
圖9中,主調度模塊接受來自操作箱及主控制柜的信號指令;自動操作模塊主要將行車移動到指定槽號位置;停止控制模塊實現行車的精確停車;運行保護模塊主要通過限位開關等方式對行車的運行過程提供保護,防止行車出現撞車事故;槽號定位模塊通過絕對定位傳感器實現行車的位置定位,為確保定位準確,可采用相對定位與絕對定位互相校驗的方式進行,絕對定位裝置實時對定位信息進行修正,確保了系統運行的健壯性;時間計算模塊則依據行車的運行速度,實時計算運行到指定位置編號所需要的時間,并反饋給操作人員,為實際操作提供決策依據。采用S7-200編寫部分程序中的槽號定位模塊如下:
:
:
//信號接收
LDN I2.0
= M18.0
LDN I2.1
= M18.1
LDN I2.2
= M18.2
LDN I2.3
= M18.3
LDN I2.4
= M18.4
//信號獲取
MOVB MB18,MB0
ANDB 31,MB0
LD SM0.0
MOVB MB0,MB1
LDB= MB0,MB1
AB<> MB1,MB2
MOVB MB0,MB20
LD SM0.0
MOVB MB1,MB2
:
:
//故障防護
LDB= MB3,MB5
LD I1.1
O I1.2
ALD
A I0.7
TON T45,30
:
:
5 結束語
采用二進制絕對編碼方式進行編碼有效的解決了增量編碼方式所存在的故障率高、定位不準、操作不便的缺陷,并且該系統結構簡單,大大降低了企業的投資成本。該定位系統操作簡便、定位位置準確。加之與增量編碼方式相結合,經過長久的試驗與應用證明:該系統運行穩定、安全可靠。該系統主要應用于工廠車間的行車定位,在自動化生產中應用廣泛。
[1] 陳正一,謝維達,錢存元.磁浮列車絕對定位系統[J].電力機車與城軌車輛,2006,28(6):8-10.
[2] 錢存元,韓正之,邵德榮,等.基于數字編解碼的磁懸浮列車絕對定位系統的設計[J].電氣自動化,2005,27(2):33-35.
[3] 柏捷.相對編碼與絕對編碼組合的數據采集編碼方案[J].測繪通報,2007(9):32-34.
[4] 郁有文,常健.絕對碼編碼器中一種新型的編碼方法[J].儀器儀表學報,2005,25(4):541-544.
[5] 邱成,朱衡君.基于絕對位置編碼的列車定位技術[J].鐵道學報, 2007,29(3):118-122.
[6] 楊順平.24位絕對式編碼器處理電路的改進設計與實現[J].電光與控制,2015,22(2):100-104.
[7] 王義文,焦環宇,劉獻禮,等.絕對式編碼器輸出信號的誤差自動補償[J].光電工程,2015,42(1):89-94.
[8] 付海軍,李小艷.絕對式編碼器的應用[J].微電機,2013,46(6):91-93.
[9] 董明,邵偉,陸藺輝.基于S7-200和V80伺服定位系統設計[J].制造業自動化,2014,36(14):105-107.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25