水下機器人-機械手系統控制方法綜述
2015-09-18 05:33:34魏延輝曾建輝賈獻強王澤鵬
重慶理工大學學報(自然科學) 2015年8期
陳 巍,魏延輝,曾建輝,賈獻強,王澤鵬
(哈爾濱工程大學自動化學院,哈爾濱 150001)
隨著人類對海洋越來越重視,對海洋的探索和開發也不斷加強,而水下機器人是人類進行探索和開發的必備工具,對該方向的研究也成為當前的科學研究熱點之一。水下機器人主要包含遙控型水下機器人(ROV)和自主型水下機器人(AUV),其中,自主水下機器人[1-2]被廣泛應用于海底管道探測、深海科學探索、海底資源勘測、水下物體搜索等領域。
水下機器人除了進行觀察外,很重要的是進行水下作業和取樣工作,這就需要應用水下機械臂。自主水下機器人為了節約能量,都是采用欠驅動方式工作。而水下機械臂進行水下作業時就會對自主水下機器人產生干擾,而欠驅動的自主水下機器人無法保證自主穩定,這樣水下機器人和水下機械臂的協調運動就成為關鍵問題。
本文在介紹水下機器人-機械手系統(UVMS)國內外的研究進展的基礎上,對UVMS的建模方法、運動學規劃算法以及其控制方法和具體的研究內容進行了歸納和總結,以便為相關研究人員提供參考。
1 UVMS研究進展
1.1 國外UVMS研究進展
國外進行UVMS的研究起步較早,多個國家和地區都開展了這方面的研究,主要包括美國、歐洲、日本以及韓國等,并促成了一批專門從事UVMS研究的大學和科研機構。
美國斯坦福大學[3]Aerospace Robotics實驗室在1996年研制了OTTER,實現了自主機器人通過機械手系統從海底取回特定的物體(圖1)。該UVMS可以搭載具有1個或2個關節的機械手,在美國蒙特里海洋生物研究所(MBARI)的測試水槽里進行了試驗,為其后UVMS的設計、模型的建立以及控制方法驗證提供了重要參考。歐盟[4]資助的深海采樣先進機械手(AMADEUS)項目,由英國、意大利、西班牙以及希臘等國家的數所大學參加,重點研究執行任務時機械手的協調控制。美國夏威夷大學[5]的研究人員進行了SAUVIM項目課題的研究,如圖2所示。SAUVIM通過分布式控制,以及機械手與本體的協調控制實現海底避障、路徑規劃以及識別和抓取目標物,并取得了一系列研究成果。

圖1 美國OTTER
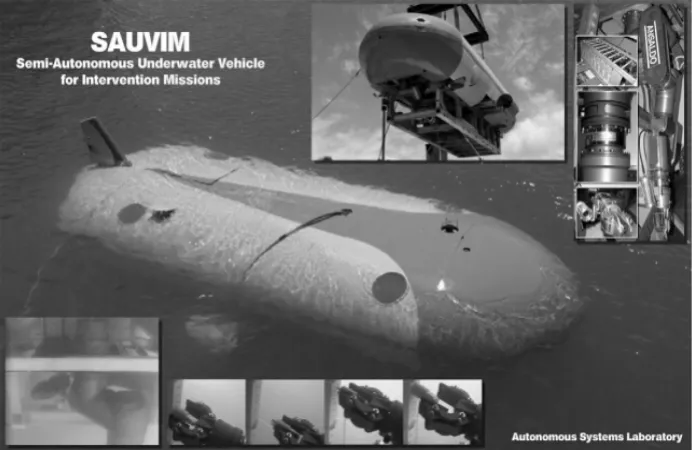
圖2 美國SAUVIM
日本Kyushu Institute of Technology的Ishitsuka等[6]針對如圖3所示的水下機器人-機械手系統Twin-Burger研究了分解加速方式控制系統動態的操縱性以及機械手與AUV本體的相互作用。韓國Pohang University of Science and Technology的Han等[7]利用PETASUS水下半自主水下機器人和PUM機械手組建成一套如圖4所示的UVMS,這套系統具有小型化、方便拆卸、易于避障等特點。日本Sakagami等[8]研制了一種新型的UVMS模型,提出了一種基于重心改變浮心位置的水下機器人-機械手系統深度控制方法。伊朗Farivarnejad等[9]研究了水下機器人雙機械手系統在水下完成共同夾持物體的動作過程,這使得UVMS在執行更加復雜的海底作業以及取樣工作時更加靈活。

圖3 日本Twin-Burger
圖4 韓國PETASUS和PUM
1.2 國內UVMS研究進展
相比于國外,國內對UVMS的研究深度和廣度還有一定差距,但也有多家單位做了很多該方面的研究,并取得了階段性的成果。
中國科學院沈陽自動化研究所研制了搭載有三功能電動機械手的魚雷型小型自治水下機器人。該機器人在系統的逆運動學求解中引入系統阻力優化函數[10],將輸入補償項和機械手擾動補償項作為載體控制的前饋項,設計了復合校正控制器[11],并在系統運動學偽逆矩陣中引入懲罰調節因子[12]。該所還研制了一種配置有3自由度機械手的UVMS測試平臺[13],如圖5所示。研究人員利用單目視覺對雙特征點模型進行距離估計,對UVMS進行懸停定位。還利用雙目立體攝像機信息[14]提出一種基于三維形態圖的UVMS復雜環境目標識別方法。
圖5 中科院沈自所UVMS測試平臺
中國海洋大學常宗瑜等對水下機器人-機械手系統的建模以及控制方法進行了研究和探索,使用依據模糊邏輯策略的優先級方法[15]規劃水下機器人本體以及搭載機械手的運動方式,采用基于力/位置混合的轉矩控制[16]滿足了機械手執行末端準確控制及定位的要求,并根據動平衡理論研究了機械手各個關節的展開運動對水下機器人本體干擾力和力矩最小化的運動規律[17]。
華中科技大學徐國華等[18]在機械手方面進行了一系列探索:對于負載時變的工作狀況下機械手精確控制問題,研究了基于其動力學模型的控制技術,并進行了自主執行作業任務的實驗研究;建立系統的運動學以及動力學數學模型[19],使用設計的滑模控制方法來實現自主作業時各個子系統的協調控制;采用高性能PC104工控機和VxWorks系統作為機械手作業控制系統的開發平臺[20-21],在此基礎上完成了控制系統的設計。
哈爾濱工程大學張銘鈞等[22]針對小型水下機器人設計了一臺3自由度的電動水下機械手,進行了水下機械手總體方案的規劃設計,并與AUV集成為UVMS,進行了實驗研究,提出了一種終端滑模控制策略[23],通過徑向基函數神經網絡對系統模型中的不確定變量進行估計以實現自適應控制。江南大學謝俊元[24]根據深海載人潛水器的水下機械手資料進行了UVMS的研究。
2 UVMS建模及運動規劃方法
2.1 UVMS建模方法
針對UVMS的協調控制,首先需要建立其系統模型,包括運動學以及動力學模型。目前常見的UVMS動力學和運動學建模方法主要有Newton-Euler法、Quasi-Lagrange法、Kane法、Davies法等。
1)Newton-Euler方法。這種方法可以建立UVMS遞推方程,建立的模型直觀,動力學方程的計算效率較高[15,17]。不足之處在于模型中方程數目較多,需要通過計算得出各部分之間的作用力,不適合用于整個系統的控制。McMillna等以及Antonelli等依據Newton-Euler法建立UVMS動力學模型[25],并進行相應的仿真實驗。
2)Quasi-Lagrange方法。這種方法中坐標量在局部坐標系中進行描述,基于能量的觀點[15,17],通過較少的方程建立系統的動力學方程。不足之處是其中的求偏導運算等過程較為繁瑣。CUI等[26]通過Quasi-Lagrange建立整個系統的動力學方程。郭瑩[27]等使用 Quasi-Lagrange方程建立自主水下作業系統的動力學數學模型,并對系統進行分析和控制。
3)Kane方法。這種方法建模效率較高,所需方程較少,但是要求通過計算得出系統各個關節或者組成部分的慣性力[15,17],不太容易滿足。Yang等[28]依據Kane方程對搭載了多個機械手的水下機器人-機械手系統建立了動力學模型。徐長密等[17]在使用指數積公式分析UVMS運動學基礎上,結合系統所受到的力并基于Kane方程建立了其動力學模型。
4)Davies方法。這種方法是基爾霍夫原理在機械及機構學中的應用,其優點是可以方便地對封閉的運動學鏈進行控制,缺點在于大部分機械手是開環的運動學鏈結構,需要額外添加虛擬的Assur鏈以構成封閉的運動學鏈。Santos等[29]使用Davies方法描述了系統的運動學,在此基礎上解決UVMS求解的冗余問題。此外,Santos等[30]還使用 Davies方法建立運動學模型,并進行UVMS軌跡跟蹤的研究。Oliveira等[31]提出了以Davies方法為基礎的雙四元素位置反饋法,避免了UVMS奇異點的出現。
2.2 UVMS運動學規劃算法
對于大多數的UVMS而言,主要包含水下機器人本體以及機械手系統兩部分,UVMS完成作業任務也主要是通過進行運動學規劃來實現。目前針對其運動學規劃主要有梯度投影法、加權偽逆法、任務優先級規劃法等多種算法[22]。
1)梯度投影法。該方法是將目標函數的梯度加入到運動學逆解中,在完成系統任務的前提下進行目標函數的優化。該方法的不足之處在于目標函數梯度的引入是否合理直接關系到完成任務的精度。
2)加權偽逆法。該方法是將加權陣引入到運動方程中,并以實現某種最小范數解為目的。其缺點是加權陣的選擇方式直接決定了系統的作業水平和完成質量。
3)任務優先級規劃法。該方法特點是在出現多個任務沖突時,可根據任務的優先級別來決定任務執行的先后順序。限制該方法應用的主要因素是任務優先級的級別在不同作業任務中是否可以實現靈活調整。
3 UVMS控制策略
3.1 UVMS 控制方法
UVMS系統具有以下特點[26]:限制了其控制的有效性,難以獲得水下機器人本體、機械手以及水下作業環境的準確模型;系統是非線性、強耦合的MIMO系統,難以找到比較有效的控制方法等。對于UVMS而言,目前常見的控制方法有PID控制、模糊控制、自適應控制、滑模控制以及魯棒控制等[22-23]。
1)PID控制。PID控制是一種經典的控制策略,因其算法簡單和可靠性高等突出特點,被廣泛應用于各類系統的控制設計。Xu等[32]提出了一種PD類型的UVMS模糊邏輯控制器。Jinhyun等[33]針對機器人不同頻段響應特性的差異設計了低頻級和高頻級 PD控制器。彭生全等[23]使用基于機器人速度以及位置變量的雙閉環PID控制方法,實現了對動機械手與小型AUV本體集成的UVMS進行控制。Herman[34]提出了水下機器人的解耦PD定點控制方法,實現了增益矩陣與系統動力學方程的匹配。
2)模糊控制。模糊控制是對實際控制經驗的總結,屬于經驗方法控制,其控制精度受到經驗總結是否完善的限制,雖然其抗干擾能力較強,但是精度相對較差[23]。在UVMS的協調控制研究中,模糊控制也有很多應用。Antonelli等[35]對于UVMS冗余解問題提出一種解法,其中模糊方法被用來控制和分配本體與機械手的運動。Xu等[32]為UVMS提出了一種PD類型的模糊邏輯控制器,該控制器的增益基于模糊規則變化。他們[36]又依據神經模糊控制方法設計了用于UVMS的智能控制器,其控制性能優于傳統的控制器。Santos等[37]提出了一種可以處理離散和連續信息的混合模糊專家控制系統用于UVMS的運動控制,減少了能耗,提升了系統可操縱性。他們[30]還提出了以節省UVMS能量消耗、利用冗余自由度為目標的基于模糊邏輯的軌跡規劃混合控制器,這對于UVMS的任務空間利用自由度的協調控制有十分重要的意義。
3)自適應控制。自適應控制是現代控制理論的重要分支,通常適用于參數不確定性嚴重或者參數變化緩慢的場合,但是穩定性較弱[23]。Sun等[38]提出了一種無需知道UVMS慣性矩陣、科里奧利力、向心力和水動力阻尼的自適應定點控制器。Antonelli等[39]將UVMS的控制分解為一種簡化的模塊化自適應跟蹤控制方法,可以簡化運算以及避免奇異值點出現。為完成多個UVMS共同抓取同一物體的任務,Sun等[40]提出了簡單的定點控制方法。Zool等[41]提出一種基于邊界概念的控制方法,并在自適應控制規律中引入結合最小二乘的Jacobian矩陣。Hyun等[42]提出了基于T–S模糊模型的自適應觀測器,依據狀態反饋控制對機械手進行控制。
4)滑模控制。滑模控制是一種比較特殊的非線性控制策略[22],其主要優點在于控制器設計相對簡單,對模型參數攝動較小,魯棒性較好,缺點是容易出現抖振,影響控制性能。Xu等[43]提出了一種新的UVMS軌跡跟蹤的滑模控制器SMFC,依據模糊邏輯控制方法實現增益的協調變化,并在五自由度UVMS仿真實驗中得出該控制策略優于傳統滑模結構控制器的控制性能。Zhang等[44]將水下機器人的軌跡跟蹤誤差用泰勒多項式近似表達,且依據滑模控制原理,采用周期性的神經網絡在線估計未知參數。Xu等[45]提出了一種基于UVMS準拉格朗日運動學方程的滑模控制方法,并且使用模糊邏輯來調整增益,避免了滑模結構固有的抖振現象。
5)魯棒控制。魯棒控制可以在有一定變化范圍內的不確定因素情況下實現對控制對象的固定控制,從而保證系統的穩定和實現控制目標[46]。Xu 等[47]提出了一種針對 UVMS 軌跡跟蹤的魯棒非線性控制器。該控制器基于UVMS動力學模型的分散形式,具有簡單、易于實現、精確、魯棒性強等特點。TAO[48]提出了一種參量時變的機器人機械手動力學模型,并基于參量時變的自適應控制律設計了自適應魯棒控制器結構。Han等[7]提出了使用運動規劃和逆向最優非線性H-infinite控制作為魯棒跟蹤控制器以使得恢復動作最優化。Han等[49]又對于UVMS的跟蹤控制提出了帶有干擾觀測器的非線性H-infinite最優控制,可以抵抗參數攝動、外部干擾等。
3.2 UVMS控制主要研究內容
綜合UVMS的研究歷程可以看出,盡管其控制方法層出不窮,但歸根結底其控制策略主要解決以下幾個問題:
1)運動規劃問題。針對UVMS的特點,首先要考慮系統到達制定目標區域的過程,對水下機器人本體進行軌跡跟蹤控制,即控制水下機器人的推進器和舵使水下機器人接近目標;其次考慮到達指定區域后相關作業任務主要是由機械手完成,采用合理的控制方法,在水下機器人運動過程中充分利用水下機械臂的冗余性,避免奇異值,同時通過對推進器等進行控制改變機器人本體姿態,從而實現機械手運動規劃的實現;最后針對不同的作業任務,按照工作的優先級進行任務分配,在軌跡規劃過程中兼顧避障問題。
2)穩定性問題。在UVMS進行協調控制過程中,水下機器人的穩定性是工作可靠的前提,直接影響作業任務的精度。利用合理的控制方法,解決如海中海流、抓取負載等不定干擾對機器人本體穩定性的影響,實現自身快速、穩定工作。此外,細化到對于不同工作要求,例如實現系統的定深控制、懸停控制等均可以作為某一穩定性指標進行研究,從而避免系統在水中出現大幅度翻轉甚至下沉等危險情況的發生。
3)多目標優化問題。UVMS的能量主要是自身攜帶的電池。考慮水下機器人的形體、負載、連續工作時間、推進器工作效率等問題,所攜帶的電池能量有限,因此能耗控制是水下機器人運動控制中的重要問題。此外,水下機械臂的作業規劃最短、空間避障、作業能力和作業精度也是優化的目標。
4)系統導航和目標識別問題。水下機器人通過自主導航到達指定作業位置,須采用捷聯慣導系統、多普勒流速計、高度計、深度計等多種傳感器進行組合才能滿足系統導航精度要求,因此多信息融合方法是研究的重點。水下作業環境比較惡劣,光線弱,渾濁度高,目標很難識別,可采用聲學傳感器和視覺傳感器組合的方式實現水下目標識別。
4 研究展望
1)模型實用化。UVMS工作于不同的環境中,諸如接近水面以及深海環境等,其動力學以及運動學模型不盡相同,應當進一步細化研究,使其在不同情景中更具指導意義。
2)協同工作化。隨著作業任務難度的增加,將會出現一個自主水下機器人搭載多個機械手,以及多個UVMS編隊共同完成復雜任務的情況,這就會促使對協同工作的UVMS編隊協作控制的研究。
3)新概念化。會出現針對不同作業任務特點而設計的各種各樣新概念的UVMS,如子母形式的UVMS,以及ROV和搭載有機械手的AUV復合系統,這樣既可以實現作業深度的擴展,也彌補了AUV相對易丟失的不足。
4)智能化。對于UVMS的控制方法會逐漸從當前比較保守的形式過渡到有較高智能的控制方法,通過新型傳感器系統的輔助,可以使其依據環境的變化智能地完成相應改變,以適應復雜的工作環境,從而完成作業任務。
5)控制容錯化。所有系統都無法避免出現各種錯誤以及故障。UVMS由于包含有機器人以及機械手兩部分系統,出現故障的概率更大。這就需要通過硬件系統和軟件系統的加強實現控制策略的容錯性。
[1]PAZMINO R S,GARCIA CENA,Arocha C E,et al.Experiences and results from designing and developing a 6 DoF underwater parallel robot[J].Robotics and Autonomous Systems,2011,59:101 -112.
[2]AGHABABA M P.3D path planning for underwater vehicles using five evolutionary optimization algorithms avoiding static and energetic obstacles[J].Applied Ocean Research,2012,38:48 -62.
[3]WANG H H,Rock S M,LEE M J.Experiments in automatic retrieval of underwater objects with an AUV[C]//Proceedings of the 1995 MTS/IEEE Oceans Conference.San Diego,USA:[s.n.],1995:366 -373.
[4]ANDERSSON S.Underwater robots:Motion and force control of vehicle manipulator systems,Gianluca Antonelli(Ed.);Springer,Berlin,Heidelberg,2003,ISBN:3 -540-00054 -2[J].Automatica,2006,42:363 -364.
[5]MARANI G,CHOI S K,YUH J.Underwater autonomous manipulation for intervention missions AUVs[J].Ocean Engineering,2009,36(1):15 -23.
[6]ISHITSUKA M,ISHII K.Control of an underwater manipulator mounted for an AUV considering dynamic manipulability[C]//the 2nd International Conference on Brain-inspired Information Technology.Kitakyushu,Japan:[s.n.],2006:269 -272.
[7]HAN J H,WAN K C.Coordinated Motion Control of Underwater Vehicle-Manipulator System with Minimizing Restoring Moments[C]//2008 IEEE/RSJ International Conference on Intelligent Robots and Systems.Nice,France:[s.n.],2008:3158 -3163.
[8]SAKAGAMI N,SHIBATA M,KAWAMURA S,et al.An Attitude Control System for Underwater Vehicle-Manipulator Systems[C]//2010 IEEE International Conference on Robotics and Automation.Anchorage,USA:[s.n.],2010:1761-1767.
[9]FARIVARNEJAD H,MOOSAVIAN S A.Multiple Impedance Control for object manipulation by a dual arm underwater vehicle– manipulator system[J].Ocean Engineering,2014,89:82 -98.
[10]張奇峰,張艾群.基于能源消耗最小的自治水下機器人-機械手系統協調運動研究[J].機器人,2006(4):444 -447,452.
[11]張奇峰,任申真,吳寶舉,等.基于輸入和機械手擾動補償的水下機器人控制實驗研究[C]//2007’儀表,自動化及先進集成技術大會.重慶,中國:[出版者不詳],2007:444-449.
[12]張奇峰,張艾群.自治水下機器人機械手系統協調運動研究[J].海洋工程,2006(3):79-84.
[13]公丕亮,張奇峰,全偉才,等.基于雙特征點視覺模型的水下機器人懸停定位研究與試驗[J].儀器儀表學報,2010,8(31):36 -41.
[14]公丕亮,張奇峰,張艾群,等.基于形態圖的UVMS水下三維目標識別[J].機械設計與制造,2011(3:)265-267.
[15]常宗瑜,陳金磊,徐長密,等.基于任務優先級方法的水下機器人-機械手系統的冗余運動學分析[C]//2011年全國機械動力學學術大會.杭州,中國:[出版者不詳],2011:219 -225.
[16]張喜超.水下機器人—機械手系統動力學分析與控制[D].青島:中國海洋大學,2011.
[17]徐長密.水下機器人—機械手系統動力學建模及運動控制研究[D].青島:中國海洋大學,2010.
[18]肖治琥.深水機械手動力學特性及自主作業研究[D].武漢:華中科技大學,2011.
[19]郭瑩.水下自主作業系統協調控制技術研究[D].武漢:華中科技大學,2008.
[20]琚亮.深海機械手位置伺服控制研究[D].武漢:華中科技大學,2007.
[21]王亞猛.水液壓驅動的水下機械臂PWM魯棒控制研究[D].武漢:華中科技大學,2011[22]彭生全.水下機器人—機械手系統運動規劃與控制技術研究[D].哈爾濱:哈爾濱工程大學,2012.
[23]秦耀昌.基于終端滑模的水下機械手運動控制技術研究[D].哈爾濱:哈爾濱工程大學,2012.
[24]謝俊元.深海載人潛水器動力學建模研究及操縱仿真器研制[D].無錫:江南大學,2009.
[25]MEMILLNA D,MEGHEE R.Efficient Dynamic simulation of an underwater vehicle with a Robotic Manipulator[J].IEEE Transactions on Systems,Man and Cyberneties,1995,25(8):1194 -1206.
[26]CUI Y,SARKAR N.A Unified Force Control Approach to Autonomous Underwater Manipulation[J].Robotics,2001,19:255 -266.
[27]郭瑩,徐國華,徐筱龍,等.水下自主作業系統軌跡跟蹤與動力定位[J].中國造船,2009(1):92-100.
[28]YANG S P.Dynamic Modeling and Control of Underwater Vehicle with Multi-Manipulator System[D].Washington:Washington University,1997.
[29]SANTOS D,RAUL G.,EDSON D P.A Reactive Neural Network Architecture to Redundancy Resolution for Underwater Vehicle-Manipulator Systems[C]//2006 IEEE International Conference on Robotics and Automation.Orlando,USA:[s.n.],2006:3238-3243.
[30]SANTOS D,GUILHERM B,RAUL G,et al.Redundancy Resolution for Underwater Vehicle-Manipulator Systems Using A Fuzzy Expert System[C]//2006 IEEE International Conference on Control Applications.Munich,Germany:IEEE,2006:2848-2853.
[31]OLIVEIRA A,DE PIERI E,MORENO U.Optimal Trajectory Tracking of Underwater Vehicle-Manipulator Systems through the Clifford Algebras and of the Davies Method[J].Advances in Applied Clifford Algebras,2013,23:453-467.
[32]XU B,SAKAGAMI N,PANDIAN S R.et al.A Fuzzy Controller for Underwater Vehicle-Manipulator Systems[C]//MTS/IEEE OCEANS.Washington,USA:[s.n.],2005:1110-1115.
[33]KIM J H,CHUNG W K.Dynamic Analysis and Active Damping Control Underwater Vehicle-Manipulator systems[C]//Proceedings of the Thirteenth International Offshore and Polar Engineering Conference.Honolulu,USA:[s.n.],2003:744-751.
[34]HERMAN P.Decoupled PD set-point controller for underwater vehicles[J].Ocean Engineering,2009,36:529-534.
[35]ANTONELLI G,CHIAVERINI S.A fuzzy approach to redundancy resolution for underwater vehicle-manipulator systems[J].Control Engineering Practice,2003,11:445-452.
[36]XU B,PANDIAN S R,SAKAGAMI N,et al.Neuro-fuzzy control of underwater vehicle-manipulator systems[J].Journal of the Franklin Institute,2012,349:1125-1138.
[37]SANTOS D,GUILHERME B,RAUL G,et al.Motion Coordination for Underwater Vehicle-Manipulator Systems using a Fuzzy Hybrid Strategy[C]//IEEE International Conference on Intelligent Robots and Systems.Beijing,China:[s.n.],2006:3018-3023.
[38]SUN Y C,CHEAH C C.Adaptive setpoint Control of Underwater Vehicle-Manipulator Systems[C]//2004 IEEE Conference on Robotics,Automation and Mechatronics.Singapore,Singapore:[s.n.],2004:434-439.
[39]ANTONELLI G.,CACCAVALE F,CHIAVERINI S.A-daptive Tracking Control of Underwater Vehicle-Manipulator Systems Based on the Virtual Decomposition Approach[J].IEEE Transactions on Robotics and Automation,2004,20:594-602.
[40]SUN Y C,CHEAH C C.Coordinated Control of Multiple Cooperative Underwater Vehicle-Manipulator Systems Holding a Common Load[C]//MTS/IEEE Techno-Ocean ’04:Bridges across the Oceans.Kobe,Japan:[s.n.],2004:1542-1547.
[41]ISMAIL Z H,DUNNIGAN M W.A region boundarybased control scheme for an autonomous underwater vehicle[J].Ocean Engineering,2011,38:2270-2280.
[42]HYUN C H,PARK C W,KIM S.Takagi-Sugeno fuzzy model based indirect adaptive fuzzy observer and controller design[J].Information Sciences,2010,180:2314-2327.
[43]XU B,PANDIAN S R,PETRY F.A Sliding Mode Fuzzy Controller for Underwater Vehicle-Manipulator Systems[C]//Annual Meeting of the North American Fuzzy Information Processing Society.Detroit,USA:[s.n.],2005:181-186.
[44]ZHANG M J,CHU Z Z.Adaptive sliding mode control based on local recurrent neural networks for underwater robot[J].Ocean Engineering,2012,45:56 -62.
[45]XU G H,GUO Y,XIANG X B,et al.Motion Control and Computer Simulation for Underwater Vehicle-Manipulator Systems[C]//Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation.Harbin,China:[s.n.],2007:1368-1373.
[46]謝明江,代穎,施頌椒.機器人魯棒控制研究進展[J].機器人,2000(1):73 -80.
[47]XU B,ABE S,SAKAGAMI N,et al.A Robust Nonlinear Controller for Underwater Vehicle-Manipulator Systems[C]//2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics.Monterey,USA:[s.n.],2005,1:711 -716.
[48]TAO G.On Robust Adaptive Control of Robot Manipulators[J].Automatica,1992,28:803 -807.
[49]HAN J H,PARK J H,CHUNG W K.Robust coordinated motion control of an underwater vehicle-manipulator system with minimizing restoring moments[J].Ocean Engineering,2011,38:1197 -1206.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
兒童故事畫報(2013年3期)2013-06-24 05:40:30