基于因素分布模型的微震定位精度敏感性分析
2015-10-13 11:23:21高永濤吳慶良吳順川楊凱豆麗萍姚鵬飛
關(guān)鍵詞:分析
高永濤,吳慶良,吳順川,楊凱,豆麗萍,姚鵬飛
?
基于因素分布模型的微震定位精度敏感性分析
高永濤,吳慶良,吳順川,楊凱,豆麗萍,姚鵬飛
(北京科技大學(xué)土木與環(huán)境工程學(xué)院,金屬礦山高效開采與安全教育部重點(diǎn)實(shí)驗(yàn)室,北京,100083)
根據(jù)微震定位方程,基于誤差最小原理,構(gòu)造微震定位精度敏感性評(píng)價(jià)的輸入輸出數(shù)學(xué)模型,選取震源點(diǎn)到各檢波器之間距離測(cè)量誤差、微震波波速標(biāo)定誤差和信號(hào)到時(shí)拾取誤差3個(gè)影響因素作為分析因子。從信息熵的角度,分析因素分布密度函數(shù),并通過泛函變分求得相應(yīng)表達(dá)式。采用正交法設(shè)計(jì)16組方案,根據(jù)分布函數(shù)求取因素各水平值,進(jìn)行全局敏感性分析。研究結(jié)果表明:3個(gè)因子取值在給定區(qū)間內(nèi)均符合均勻分布;無論是對(duì)內(nèi)場震源點(diǎn)還是外場震源點(diǎn),微震波波速誤差,是對(duì)定位結(jié)果影響最大的因素,各因子對(duì)定位精度影響的主次順序?yàn)椋篹,e,e;對(duì)于內(nèi)場震源點(diǎn),3個(gè)因素對(duì)定位精度均有高度顯著影響。但對(duì)于外場震源點(diǎn),可能由于因素之間的交互作用或者試驗(yàn)誤差影響,僅微震波波速標(biāo)定誤差對(duì)定位精度有高度顯著影響。相關(guān)研究可為微震監(jiān)測(cè)的準(zhǔn)確定位等提供針對(duì)性指導(dǎo)。
微震;定位精度;敏感性;分布模型;誤差
隨著深部礦產(chǎn)資源的采掘和地下空間的開發(fā)利用,地下工程不斷走向深部,特別是非煤礦山及隧道工程,高應(yīng)力條件下巖爆、地質(zhì)缺陷活化等問題日漸突出,單純靠傳統(tǒng)的巖石力學(xué)手段已經(jīng)遠(yuǎn)遠(yuǎn)不能滿足現(xiàn)實(shí)安全監(jiān)測(cè)的需要,基于地球物理學(xué)發(fā)展起來的微震技術(shù)可以有效的監(jiān)測(cè)巖石微破裂發(fā)生的位置,近年來,已經(jīng)廣泛地應(yīng)用于礦山、水電等地下工程監(jiān)測(cè)[1?3]。微震事件的空間分布規(guī)律包含著巖體不穩(wěn)定區(qū)域的位置、范圍和方向等大量信息,然而由于實(shí)際工程的復(fù)雜多樣,造成定位結(jié)果會(huì)出現(xiàn)不同程度的誤差,少則幾米,多則數(shù)十米。影響微震定位精度的因素較多,且大部分具有隨機(jī)性、可變性、模糊性等不確定特點(diǎn),要進(jìn)行準(zhǔn)確可靠的定量分析較為困難,因此,對(duì)影響定位精度的根本因素進(jìn)行敏感性分析十分必要。目前用于因素敏感性分析的方法很多,按考慮影響因素多少可分為單因素分析法(局部敏感性分析)和多因素分析法(全局敏感性分析)。單因素分析法只檢驗(yàn)單個(gè)因素對(duì)模型的影響程度,計(jì)算簡單快捷,但需要一定的假設(shè),與實(shí)際情況不符,代表性的研究有Garson算 法[4]、隨機(jī)檢驗(yàn)法[5]等;而多因素分析法可檢驗(yàn)多個(gè)因素對(duì)模型結(jié)果產(chǎn)生的總影響,并考慮了因素之間的相互作用對(duì)模型輸出的影響,更符合實(shí)際情況,在橋 梁、結(jié)構(gòu)、經(jīng)濟(jì)、水文、環(huán)境、生態(tài)等領(lǐng)域得到廣泛應(yīng)用[6?12],代表性的研究有方差分解法[10]、偏導(dǎo)數(shù)(PaD2)法[11],拉丁超立方單因子每次(LH-OAT)方 法[12]。由于敏感性分析在一定的輸入輸出模型和因素分布模型基礎(chǔ)上進(jìn)行的,因此,本文作者根據(jù)微震定位方程,基于誤差最小原理構(gòu)造相應(yīng)的輸入輸出數(shù)學(xué)模型,并從信息熵的角度分析因素分布密度函數(shù),最后采用正交設(shè)計(jì)法進(jìn)行全局敏感性分析,找出相應(yīng)的較敏感因素和最敏感因素。本文作者的研究可為微震監(jiān)測(cè)的準(zhǔn)確定位等提供針對(duì)性指導(dǎo)。
1 輸入輸出模型的建立

若發(fā)震時(shí)間為0,檢波器接收到信號(hào)的時(shí)間為,震源到各檢波器之間巖層中的微震波傳播速度(均勻速度模型)為,則定位方程為
從式(2)可以看出:礦山現(xiàn)場地質(zhì)地形復(fù)雜、資源開采時(shí)人類活動(dòng)干擾等原因?qū)ξ⒄鹗录ㄎ痪鹊挠绊懽罱K體現(xiàn)在3個(gè)方面:震源點(diǎn)到各檢波器之間距離的測(cè)量誤差(即檢波器坐標(biāo)測(cè)量誤差)、微震波波速標(biāo)定誤差、信號(hào)到時(shí)拾取誤差。假定參數(shù)測(cè)量值與真值之間誤差為(=1, 2, …,;=1, 2, 3),則
將式(3)代入定位方程可得:

(4)
2 影響因素分布密度函數(shù)
為分析微震定位精度對(duì)相關(guān)參數(shù)的敏感程度,選取震源點(diǎn)到各檢波器之間的距離測(cè)量誤差D、微震波波速標(biāo)定誤差V和信號(hào)到時(shí)拾取誤差T這3個(gè)因素作為分析因子。假定在某次微震事件定位分析過程中,某個(gè)因子值有種可能,且它們出現(xiàn)的概率分別為,則這個(gè)因子的熵為
若測(cè)量誤差值有無窮多個(gè)可能,且連續(xù)分布,則熵可寫為

求極限可得
假定某個(gè)因子只可能出現(xiàn)在有限區(qū)域[,]內(nèi),則限制條件記為。由于事先無法準(zhǔn)確預(yù)測(cè)該因子取值,即不確定性最大,則對(duì)應(yīng)的熵應(yīng)為極值,對(duì)熵變分,則有。
定義函數(shù)
使其滿足歐拉方程
通過限制條件,求得
顯然某個(gè)因子取值在給定區(qū)間內(nèi)符合均勻分布,式(13)為均勻分布的一般表達(dá)式。
3 因子各水平取值及試驗(yàn)方案的優(yōu)化設(shè)計(jì)
在全局敏感性分析中,若對(duì)每個(gè)因素的每個(gè)水平都相互搭配進(jìn)行全面分析,則隨著因素和水平數(shù)的增加,處理組合數(shù)將急劇增加,必然會(huì)耗費(fèi)大量的時(shí)間、人力和物力。大量研究表明:在全部處理組合中,采用正交設(shè)計(jì)方法,僅挑選部分有代表性的水平組合(處理組合)進(jìn)行分析,同樣能達(dá)到理想結(jié)果。
若某個(gè)因子值的分布區(qū)間為[,],分布密度函數(shù)為,選取個(gè)水平將該分布密度函數(shù)曲線下的全部面積做?1等分,算上頭尾區(qū)間,則相應(yīng)的積分上限即為各水平值,即
采用3因素4水平L16(45)進(jìn)行正交設(shè)計(jì)。正交試驗(yàn)設(shè)計(jì)方案如表1所示。

表1 正交試驗(yàn)設(shè)計(jì)方案
4 算例分析
假定在空間區(qū)域內(nèi),6個(gè)傳感器位于球體的6個(gè)方位點(diǎn),坐標(biāo)(單位均為m)分別是(0,500,500),(500,0,500),(1 000,500,500),(500,1 000,500),(500,500,1 000)和(500,500,0)。假定微震源(232,604,746)和(673,700,1 200)分別位于檢波器陣列的內(nèi)、外場區(qū)域,微震波在介質(zhì)中傳播的等效波速=5.2 m/ms,發(fā)震時(shí)間統(tǒng)一為某日10:00:00:20,傳感器與震源空間分布位置如圖1所示,本文規(guī)定在某1次微震事件中,外界對(duì)單一因素造成的誤差相等。
選用北京科技大學(xué)自主研發(fā)的微地震監(jiān)測(cè)系統(tǒng)(BMS)作為監(jiān)測(cè)設(shè)備,對(duì)河北某礦山進(jìn)行1 a多的微震監(jiān)測(cè)[13]統(tǒng)計(jì)發(fā)現(xiàn),震源點(diǎn)到各檢波器之間的距離測(cè)量誤差D(m)、微震波波速標(biāo)定誤差V(m/ms)和信號(hào)到時(shí)拾取誤差T(ms)這3個(gè)因子的分布區(qū)間分別為[0, 6],和[0, 3],參照因素各水平的求解方法和正交試驗(yàn)方案,可得內(nèi)、外場震源點(diǎn)的3因素4水平值如表2所示。
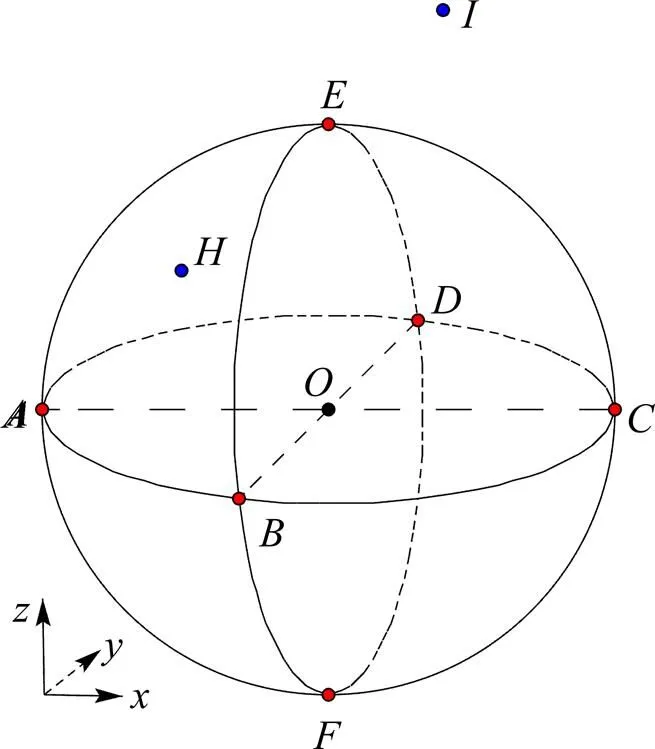
圖1 傳感器與震源空間分布位置示意圖
最終求得內(nèi)、外場震源點(diǎn)的定位結(jié)果(各16組),如表3所示。
5 敏感性分析
根據(jù)表3所示的定位結(jié)果,分別采用直觀分析方法和方差分析法對(duì)影響微震定位精度的3個(gè)因素進(jìn)行敏感性分析。設(shè)試驗(yàn)次數(shù)為,每個(gè)因素的水平數(shù)為個(gè),每個(gè)水平作/(即次)試驗(yàn)。
5.1 直觀分析(極差分析)
表4所示為內(nèi)場震源點(diǎn)試驗(yàn)結(jié)果的極差分析,表5所示為外場震源點(diǎn)試驗(yàn)結(jié)果的極差分析。表4和表5中:K為第列因素水平所對(duì)應(yīng)的試驗(yàn)指標(biāo)的和;為K的平均值;R為第列因素的極差,反映了第列因素的水平變動(dòng)時(shí),定位精度的變動(dòng)幅度。根據(jù)極差R,可以判斷因素的主次。
從表4和表5可知:各列的極差不相等,這說明各因素的水平改變對(duì)定位精度的影響不相同,R越大,表示該列因素的數(shù)值在試驗(yàn)范圍內(nèi)的變化會(huì)導(dǎo)致定位精度在數(shù)值上變化越大,所以,極差最大的那1列即微震波波速誤差,對(duì)定位結(jié)果影響最大的因素,也就是最主要的因素。由于內(nèi)場和外場震源點(diǎn)試驗(yàn)結(jié)果的極差R從大到小的順序均為V,T,D,故各因素從主到次的順序?yàn)椋?i>V,T,D。
相對(duì)各因子列(第1,2和3列),空白列(第4列)的水平均值隨著水平數(shù)的改變而變化(變化很小),說明因素之間有一定的交互作用,或試驗(yàn)有一定的試驗(yàn)誤差影響(外場震源定位結(jié)果較為明顯)。但由于其極差小于各因素列的極差,故而本算例中暫不考慮其影響。

表2 正交設(shè)計(jì)時(shí)內(nèi)、外場震源點(diǎn)的3因素4水平值

表3 內(nèi)、外場震源點(diǎn)的定位結(jié)果
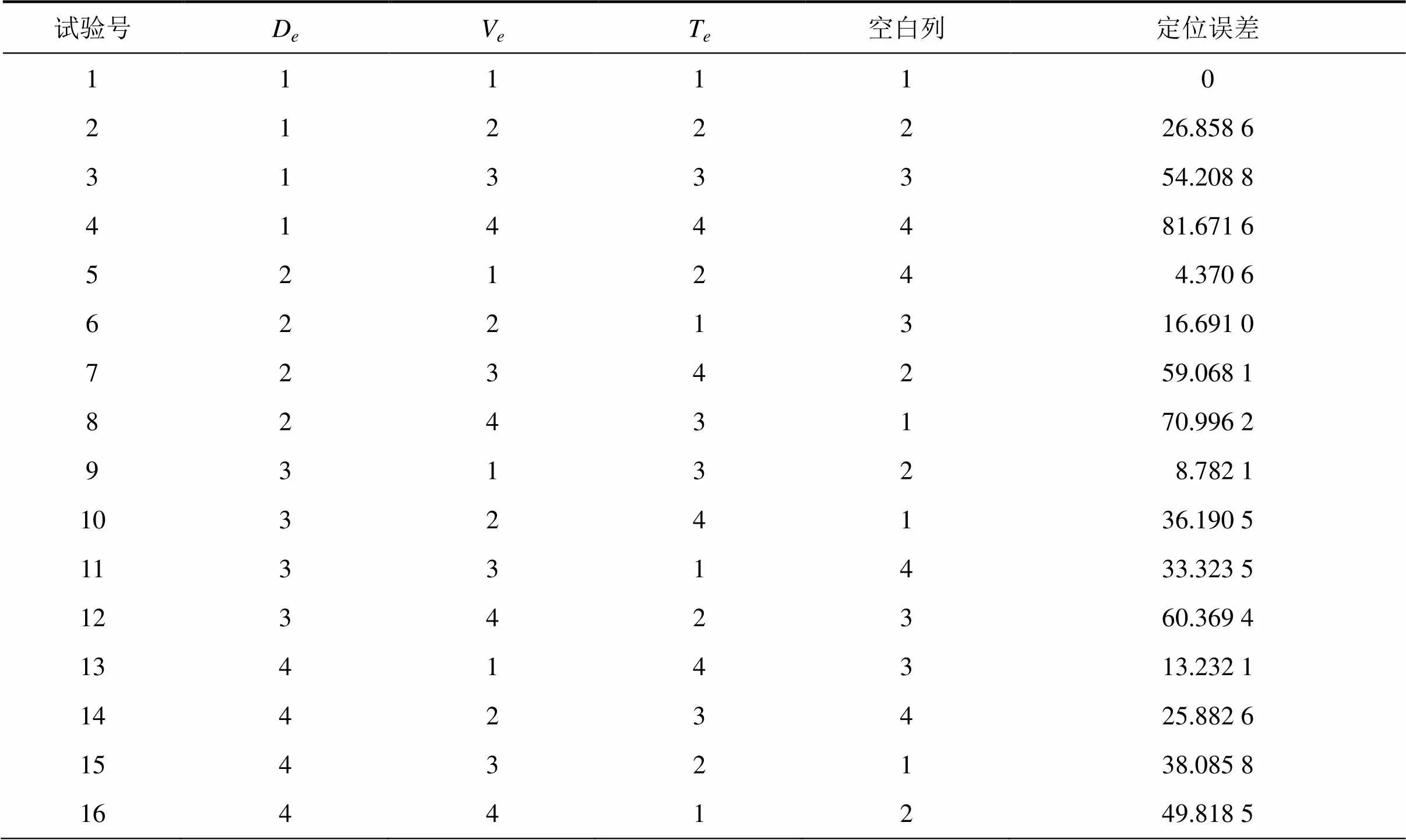
表4 內(nèi)場震源點(diǎn)試驗(yàn)結(jié)果的極差分析
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
