基于數字信號處理的驅動機構特征點測量方法
2015-10-19 10:39:20余海濤
科技視界 2015年29期
關鍵詞:測量

【摘 要】控制棒驅動機構(CRDM)的特征點位置是一個用于判定驅動機構及電源狀態的重要參數。 常用的特征點位置測量方法是使用數字記錄儀測量各線圈電流波形,并使用人工測量的方式尋找特征點。在本文中,提出了一種基于數字信號處理的自動特征點測量方法,并使用LabVIEW語言編制了相應的測量程序用于工程使用。 試驗結果表明,使用該方法可以對特征點位置進行正確的識別。
【關鍵詞】數字信號;驅動機構;測量
【Abstract】The feature point of Control Rod Drive Mechanism (CRDM) is an important parameter to determine the status of CRDM and RGL.A common measuring method is to record current waveform of coils and measure feature points manually. In this article, an automatic measuring method to feature point is presented, and applied with LabVIEW for engineering. The experiment results show that this method can recognize feature point correctly.
【Key words】Digital signal; Drive mechanism; measurement
0 簡介
在目前國內常見的商業壓水堆(pressurized water reactor, PWR)中,控制棒驅動機構(control rod drive mechanism, CRDM)是對其反應性進行控制的主要設備。因此,當控制棒驅動機構發生卡棒、滑棒等故障時會對反應堆的運行造成很大影響,嚴重危害反應堆的安全。
由于控制棒驅動機構是一個機電一體化的設備,其可能的故障原因可分為兩類。一類故障是由驅動機構機械部件磨損或損壞導致的故障,當出現此類故障時可以觀測到線圈電流波形中的動作點位置異常或無法測得。另一類故障則是由棒電源或驅動機構線圈異常所導致的故障,當出現此類故障時,可以觀測到線圈電流的時序、幅值、紋波或上升/下降時間等方面的異常。
由于以往技術條件的限制,之前國內大部分核電站難以對驅動機構運行狀態進行實時監測,只有在控制棒給定棒位與實測棒位之間出現較大偏差時才能發現故障。但是,此時故障已可能使得驅動機構或驅動線損壞,甚至使控制棒落下,導致反應堆意外停堆,嚴重影響核電站安全經濟的運行和核電廠的經濟效益。
因此,有必要設計一種自動化的驅動機構運行狀態檢測方法[1]。通過使用自動化的測試可以在驅動機構發生嚴重故障之前就發現故障的征兆,使得故障得到及時的處理。本文中,主要介紹這一檢測方法中對線圈電流特征點的測量算法及實現。
1 特征點定義
壓水堆核電站中的控制棒驅動機構中,主要運動部件包括保持鉤爪和傳遞鉤爪。這些部件分別受到保持線圈(SGC)、傳遞線圈(MGC)和提升線圈(LC)通電時發出的磁場的控制。當這些移動部件按照一定順序抱緊、提升、釋放時,控制棒也隨之移動[2]。下表是驅動機構提升時的典型時序。
驅動機構按照上表動作一輪后,鉤爪與銜鐵返回初始位置,控制棒提升1步。在這一過程中,鉤爪與銜鐵的移動順序是否正確,機構的動作是否順暢都是檢驗驅動機構和棒電源是否正常運行的重要參數。在工程中,由于無法直接觀察鉤爪和銜鐵的動作情況,必須通過線圈電流波形和驅動機構振動對其進行判斷。對于每一步的線圈電流波形,通常需要監測以下參數。
a.電流時序:各線圈電流變換開始點的順序,該參數表示了驅動機構中鉤爪與銜鐵的動作順序。
b.轉換時間:各線圈電流變換所用時間,該時間決定了驅動機構能否在限定的時間內完成步進動作。
c.鉤爪特征點:線圈電流突變時間點,該時間點表示了驅動機構中鉤爪實際吸合動作的點。
在實際測量中,需要測量所有線圈①電流開始變化的點,②電流結束變化的點和③電流突變的點,這些點在本文中稱為特征點。在對特征點進行簡單處理后,就可以得到以上需要的參數。
2 特征點測量方法
2.1 信號的預處理
對特征點進行測量時,首先要獲得SGC、MGC和LC的電流波形。但在工程中,獲得的電流波形總是充滿著各種干擾。通常來說,對測量影響較大的干擾有以下兩種:
a.高頻的電磁干擾:此類干擾包括測量環境中的背景電磁噪聲、棒電源中斬波電路開關器件動作時產生的干擾和測量時引入的干擾等。這些信號頻率一般遠高于有效信號的頻域,在時域上表現為隨機出現的尖峰與毛刺。
b.工頻的電磁干擾:此類干擾是一種基波頻率為150Hz的干擾。該干擾在波形上的表現為一系列頻率固定的半圓形波動,俗稱“饅頭波”。 此類干擾存在與否由RGL的原理決定。如秦山二期、大亞灣核電站等反應堆的RGL采用了可控硅主電路方案,該類方案將工頻交流電用可控硅整流后直接輸出至CRDM,導致了測得的CRDM線圈電流疊加有工頻的干擾。而若RGL采用了以脈寬調制為控制手段的IGBT主電路方案[3],則輸入的工頻交流電經整流濾波后轉化為直流, 再使用IGBT變頻后輸出至CRDM,將會使得測得的CRDM線圈電流無上述工頻干擾。
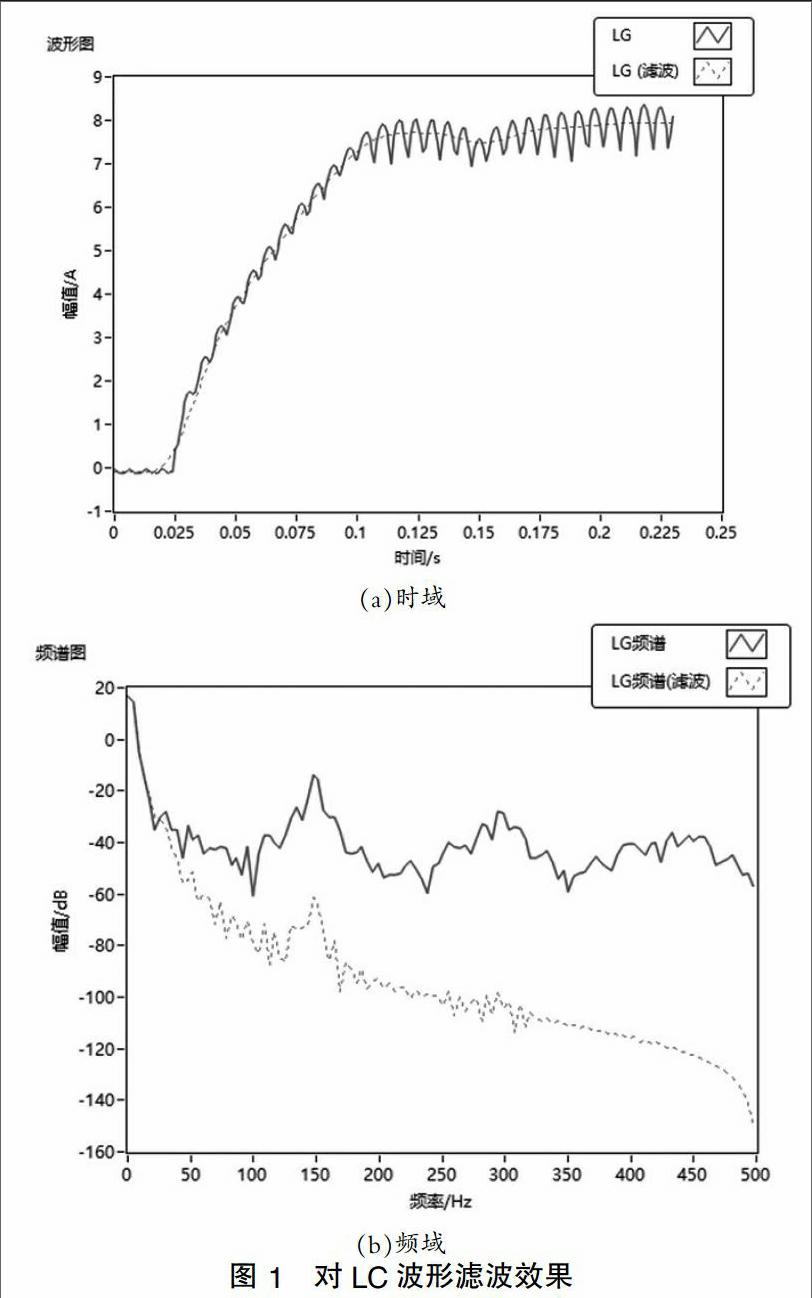
對于以上干擾,除了使用濾波電路等硬件方法處理外,還必須在測量算法中設計相應的算法進行進一步的處理。在某些測量系統[4]中,采用了一種專用的濾波器對兩種干擾進行處理。這一濾波器平均化處理每個干擾區間的數值,其輸出結果基本消除了工頻干擾,且時間延遲技校。這類專用的濾波器對于特定形式的干擾有很好的濾除效果,但當采樣頻率變化或干擾類別變化時,必須對濾波器進行較大的修改。在本文中,根據兩種干擾的共同特性,設計了一種IIR濾波器對原始信號進行濾波[5]。IIR濾波器的算法為:
由圖 1可以看出,通過使用式1的算法對原始信號進行濾波后,位于高頻段的干擾信號被有效濾除,可以方便的進行下一步的特征點測量。
2.2 信號的分段處理
在工程中,需要在控制棒連續的提升/下插的過程中對特征點進行測量。因此,在進行測量前必須要先將每一步對應的信號抽取出來。通過分析各工況下的電流時序表,可以看出
1)當CRDM處于正常的提升/下插工況時,SG信號在+10ms時由半電流變為全電流;
2)當CRDM第一步提升時,MG信號在+10ms時由零電流變為全電流。
因此,可以使用SG信號或MG信號的第一個上升沿作為觸發信號,截取其前10ms和后790ms一段的信號作為這一步中特征點測量的電流波形數據。
2.3 特征點的測量判據
將原始數據進行濾波和分段處理后,就可以對單步波形進行特征點的測量。各線圈波形中的特征點可分為以下三類:
a.電流由大電流/小電流/零電流開始上升/下降的點;
b.電流結束上升/下降,到達大電流/小電流/零電流的點;
c.機構動作,電流突變的點。
對于a、b兩類特征點,最簡單的測量方法是使用電流值進行判斷。在工程中,各線圈的全電流/半電流值經過調試,可以認為是定值。因此,這兩類特征點的判據可以定義為濾波后信號上升/下降過程中通過閾值的點。
對于c類特征點,則需要對濾波后波形進行微分處理后再進行測量。
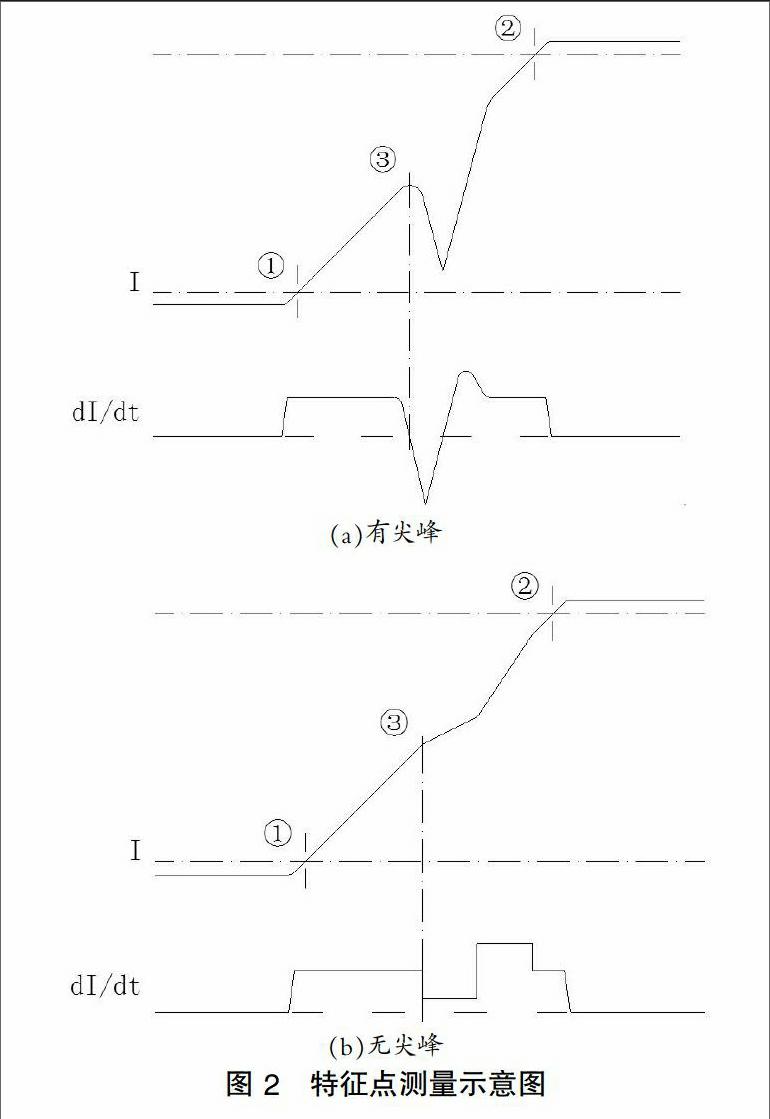
機構正常動作時,SG和LG的電流波形在上升的過程中會出現一個如圖 2-a所示的向下的尖峰。由于在下尖峰的位置電流微分值di/dt<0;在動作前電流上升,其微分值di/dt>0。因此,此時取di/dt=0的點作為特征點。
MG的電流波形和動作異常的SG/LG的電流波形在機構動作時可能不會出現明顯的下尖峰,而會如圖 2-b出現一個較緩的臺階。此時,電流微分后最小值min(di/dt)>0,臺階開始處的電流微分值最小,在臺階上升沿電流微分值最大,臺階前后的電流微分值介于兩者之間。因此,此時取max(di/dt)之前di/dt最小點作為特征點。
圖 2為對三類特征點的測量示意圖,標為①②③的點對應以上a、b、c類特征點。在實際測量中,特征點③的幅值有可能接近或大于特征點②的幅值。為了防止判斷失誤,c類特征點前的特征點由前向后查找;c類特征點后的特征點由后向前查找。以圖 2為例,首先分別由兩側查找特征點①和②,最后在特征點①和②之間查找特征點③。
3 測量方法的實現
為了在實際設備中實現上述特征點測量方法,選用LabVIEW語言編制了相應的程序。計算時,首先要對各線圈電流波形分別進行分析。各單通道處理模塊的運算邏輯類似,但計算參數不同。如SGC的電流波形數據的處理模塊如圖3所示。
由于鉤爪吸合時電流波形變化較為劇烈,計算時對吸合時刻的前后特征點分別進行處理。接收到波形數據后,首先由電流波形的兩側向中間查找特征點,依次找到除鉤爪吸合點以外的特征點。然后,截取吸合點兩側特征點之間的波形,并在這段波形中尋找電流跳變的位置。最后,按照順序將所有特征點位置輸出。
各通道電流波形的處理結果在上層程序中進行進一步的分析,程序見下(圖5)。
上層程序以三個線圈的電流波形數據為輸入,計算時首先將各通道的電流波形數據分別輸入對應的特征點測量模塊。單通道的處理模塊會計算出各通道信號的全部特征點。
接下來,上層程序根據MGC與LC第一個特征點的先后順序判斷當前CRDM的運行方向。 當LC的第一個特征點位于MGC第一個特征點之后時認為CRDM處于提升狀態,否則處于下插狀態。
最后,上層程序根據CRDM的運行方向,按照要求順序組合三個線圈的特征點,輸出要求的特征點參數。
4 實驗驗證與應用
為驗證測量算法及參數的正確性,我們將來自核電廠的CRDM線圈電流實測波形作為測試的輸入,比較自動測量結果與手動測量結果的一致性。實驗結果顯示,使用以上測量程序可以很好的對特征點位置進行測量。上層診斷程序通過比較測得的特征點位置與合格判據,可以很直接的判斷出驅動機構運行是否正常。
可以看出,使用自動測量程序可以正確測量出保持線圈特征點位置,發現保持線圈零到全時間過長的故障。
經試驗驗證后,特征點測量程序作為重要算法模塊整合至驅動機構運行性能監測功能中。通過使用特征點測量程序,驅動機構運行性能監測實現了特征點實時監控,運行電流實時監控等重要功能,滿足了設計要求。
本測量方法已成功應用于海南昌江核電工程和福清核電工程3、4號機組,并在現場系統的調試和試驗過程中完成了CRDM動作點等性能的監測,為CRDM的正常運行和維護提供了有力的支持,并極大減輕了維護人員的勞動強度。
5 結論
從海南昌江核電工程應用的實際情況表明,本文所設計的特征點測量方法計算速度快,對特征點的測量準確。通過使用該方法,驅動機構運行性能監測功能可以對電流時序、轉換時間、動作點等運行參數進行實時的監測,在故障發生的早期就可發現征兆,提高了CRDM運行的可用性和可靠性。
【參考文獻】
[1]賴厚晶,陳衛華,姚立民,等.CPR1000 棒控棒位系統性能試驗研究及開發[J]. 自動化儀表,2013,34(2):56-60.
[2]劉鵬亮,周建明,呂永紅.控制棒驅動機構步進運動特性研究[J].核動力工程, 2014,35(2):127-130.
[3]鄭杲,黃可東,余海濤,等.基于 IGBT 的反應堆控制棒驅動機構電源控制裝置[J].核動力工程,2014,35(1):138-141.
[4]昌正科,董治國,常樂莉.壓水堆核電站 CRDM 故障診斷研究與實踐[J].自動化儀表,2013,34(6):58-61.
[5]胡廣書.數字信號處理:理論,算法與實現[M].清華大學出版社有限公司,2003.
[責任編輯:楊玉潔]
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00