船用兩相斬波器的故障分析
2015-10-24 03:50:01謝澎波梅松濤王冠
船電技術 2015年10期
謝澎波,梅松濤,王冠
(1.武漢船用電力推進裝置研究所,武漢430064;2.92858部隊,浙江寧波315812)
船用兩相斬波器的故障分析
謝澎波1,梅松濤1,王冠2
(1.武漢船用電力推進裝置研究所,武漢430064;2.92858部隊,浙江寧波315812)
本文介紹了船用兩相斬波器的原理,對船用兩相斬波器的一些常見故障進行了分析,提出使用和維修方面的建議。
船用兩相斬波器故障維修
0 引言
船用兩相斬波器是重要的直流推進電動機調速裝置,船用兩相斬波器通過其控制電路將推進電動機的轉速給定信號與反饋信號經過比例積分運算后產生PWM信號,驅動主回路的開關器件進行斬波,將固定幅值的直流電壓變換成可調的直流電壓,從而實現推進電動機的調速。船用兩相斬波器主要由控制電路和主回路組成,控制電路有電源模塊、DSP板、信號調理板、光纖板、電流傳感器、驅動板等,主回路有濾波電感、濾波電容,平衡電抗器、IGBT、續流二極管、緩沖吸收電路等。
船用兩相斬波器的各個組成器件都有其相應的作用,當某個器件損壞(失效)后,就會導致船用兩相斬波器功能不正常,嚴重時甚至無法運行,本文對船用兩相斬波器的一些常見故障進行分析,并針對這些故障提出相應的解決辦法。
1 船用兩相斬波器原理
1.1主回路組成及工作原理
船用兩相斬波器主電路結構如圖1所示。
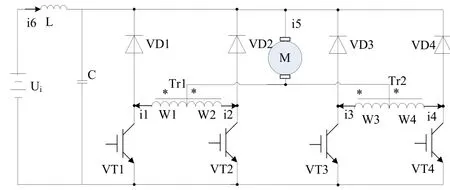
圖1 船用兩相斬波器主電路結構圖
圖中濾波電路由L、C組成,開關器件VT1、VT2、VT3、VT4分別由兩個IGBT模塊并聯組成;VD1、VD2、VD3、VD4是續流二極管,Tr1、Tr2是平衡電抗器。VT1與VT3的開通、關斷時間一致,VT2與VT4的開通關斷時間一致,VT1、VT3的驅動脈沖超前或滯后VT2、VT4的驅動脈沖1/2個周期。
當電路中發生短路情況時,IGBT的集電極電流增加至超過規定值,則C-E之間的電壓會急劇增加,會導致IGBT因自身溫度急劇上升而損壞。電源電壓越高,模塊溫度越高,其短路耐受能力就越小。因此需要檢測電路中的電流值,并在電流值超過一定值后迅速地關斷器件,以免造成器件的損壞。由于電路采用兩重兩相斬波,有4條支路,加上輸入、輸出,電路中一共需要檢測6個部位的電流,電流傳感器選擇霍爾電流傳感器。霍爾電流傳感器具有反應速度快、測量精度高等特點。對于母線電流的變化,霍爾電流傳感器能及時準確地做出反應。
1.2控制電路組成及工作原理
船用兩相斬波器控制電路主要由DSP板、信號調理板、光纖板和驅動板、電源及傳感器等組成。其結構圖如圖2所示。
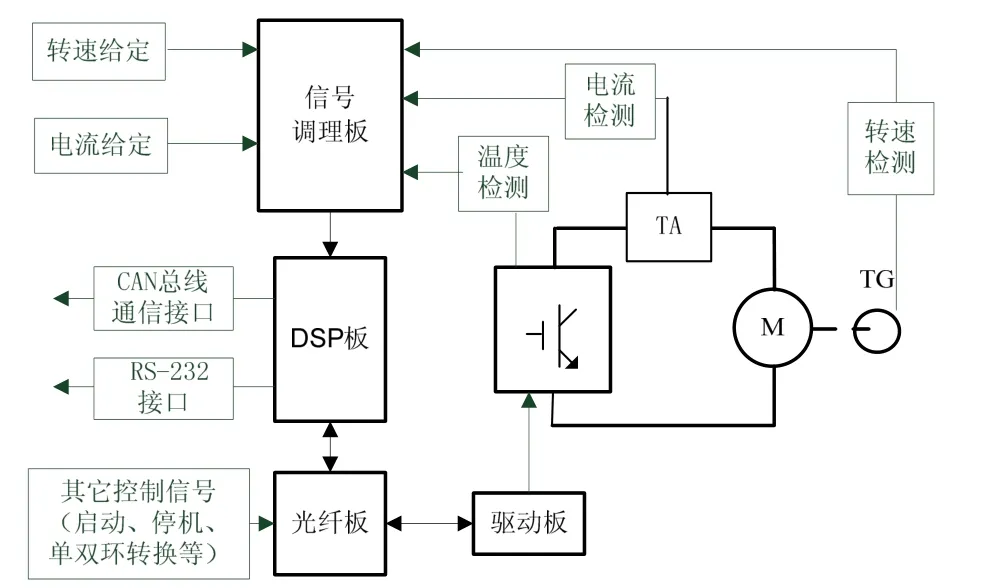
圖2 船用兩相斬波器控制電路結構圖
DSP板主要采用DSP芯片加CPLD(可編程邏輯芯片)的電路架構,輔以一些外圍擴展輔助電路。DSP板采集主回路現場數據,進行轉速、電流雙閉環調節運算,輸出PWM脈沖信號,并提供系統保護功能。
信號調理板負責對主回路的1、2、3、4支路電流、輸入電流、輸出電流、電流給定、轉速給定以及轉速反饋等模擬信號進行隔離、濾波和電平轉換。將其轉換為5V信號,送給DSP板。信號調理板同時還包含硬件檢測電路,通過將轉換后的主回路1、2、3、4支路電流、輸入電流、輸出電流信號與設定值進行比較,輸出過流報警信號至DSP板。
光纖板負責電信號/光信號和光信號/電信號的轉換,通過光纖和驅動板連接,光纖板將DSP板的PWM信號傳送至驅動板、并將驅動板的狀態信號傳送至DSP板,實現了強電信號和弱電信號的隔離,這樣可以避免驅動信號因傳輸距離過長而受到電磁干擾。
驅動電路板主要由光纖接收器、發送器、驅動模塊2SD315AI等組成。驅動模塊2SD315AI以專用芯片組為基礎,外加必需的其它元件組成。驅動模塊2SD315AI采用脈沖變壓器隔離方式,能同時驅動兩個IGBT模塊,可提供±15V的驅動電壓和±15 A的峰值電流,具有準確可靠的驅動功能與靈活可調的過流保護功能,同時可對電源電壓進行欠壓檢測。
船用兩相斬波器采用兩種工作模式:電流單閉環調速模式和轉速、電流雙閉環調速模式。兩種工作模式可切換。裝置一般情況下采用雙閉環調速模式,這時電流環為內環,轉速環為外環。
2 船用兩相斬波器常見故障分析
2.1濾波電容失效
因此,當發現船用兩相斬波器熔斷器熔斷時,故障原因很有可能是濾波電容失效導致的。維修時,我們應該按以下步驟進行器件檢查:
1)檢查濾波電容是否有容值降低或者失效;2)檢查IGBT模塊是否有被擊穿或者開路;3)檢查驅動板輸出波形是否正常。
因為短路電流很大,超過線路中的電流傳感器的額定值,造成電流傳感器損壞,所以還需要對電流傳感器進行檢查。
2.2輸出電流傳感器故障
如圖1所示,船用兩相斬波器主回路需要檢測6個部位的電流:4條支路電流i1、i2、i3、i4;輸出電流i5;輸入電流i6。
船用兩相斬波器調速的控制原理如圖3所示,圖中ACR為電流調節器,ASR為轉速調節器。
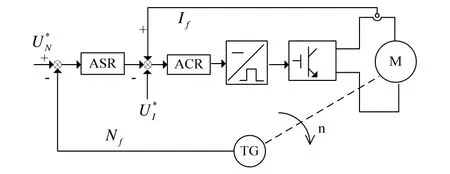
圖3 船用兩相斬波器調速的控制原理圖
當輸出電流傳感器損壞而無信號輸出時,電流調節器ACR無反饋信號,此時電流調節器ACR是一個開環控制系統,并且開環增益很大。在斬波器單環調速模式運行時,較小的電流給定信號就可以讓開環的電流調節器ACR很快達到飽和輸出,從而使斬波器的斬波脈寬一直為最大,這將造成斬波器輸出電流過載。
同理,在斬波器雙環調速模式運行時,轉速調節器ASR的輸出信號當作電流調節器ACR的輸入信號,再用ACR的輸出信號去控制IGBT模塊驅動波形,轉速調節器ASR是閉環控制,電流調節器ACR是開環控制,電流調節器ACR也是很快就達到飽和輸出。
因此,當輸出電流傳感器無信號輸出時,會造成斬波器輸出電流過載,這在啟動直流推進電動機的過程中危害更大,因為直流電動機在靜止時電樞無反電勢,電樞繞組的電阻值又很小,此時等效于斬波器輸出短路的狀態,較大的電流沖擊可能造成開關器件IGBT模塊的損壞。
2.2支路電流傳感器故障
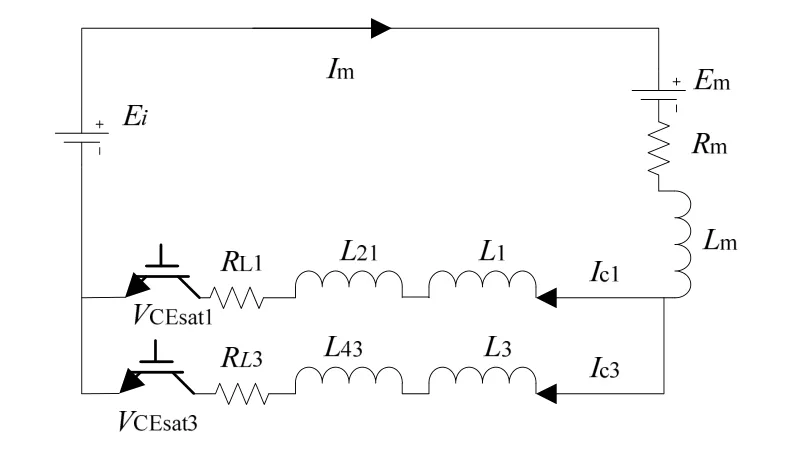
圖4 VT1、VT3同時導通的等效電路圖
船用兩相斬波器的四個支路中,其中有兩個是同時開通或關斷的,圖4是VT1、VT3同時導通的等效電路,圖中:Em、Rm、Lm是直流電動機電樞的等效電參數;L1、L3是W1、W3的等效電感;L21是W2、W1的互感;L43是W4、W3的互感;RL1、RL3是W1、W3的電阻(包括線路電阻);VCEsat1、VCEsat3是VT1、VT3飽和壓降。
由圖4可知:
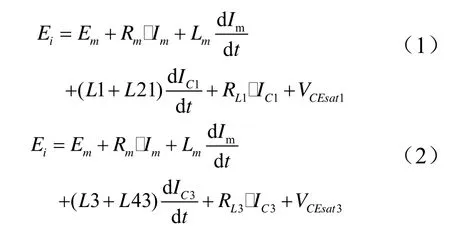
由式(1)、式(2)可知,當L1、L3、RL1、RL3、VCEsat1、VCEsat3不同時,1支路、3支路的電流IC1、IC3就會不一致。同理,2支路、4支路的電流IC2、IC4與L2、L4、RL2、RL4、VCEsat2、VCEsat4有關。
船用兩相斬波器通過調節驅動信號來實現各個支路電流均衡,調節原理如下:
將支路電流i1+i3的值與支路電流i2+i4的值進行比較,并根據他們的差值來對VT2、VT4的驅動波形進行調節,如圖5所示。
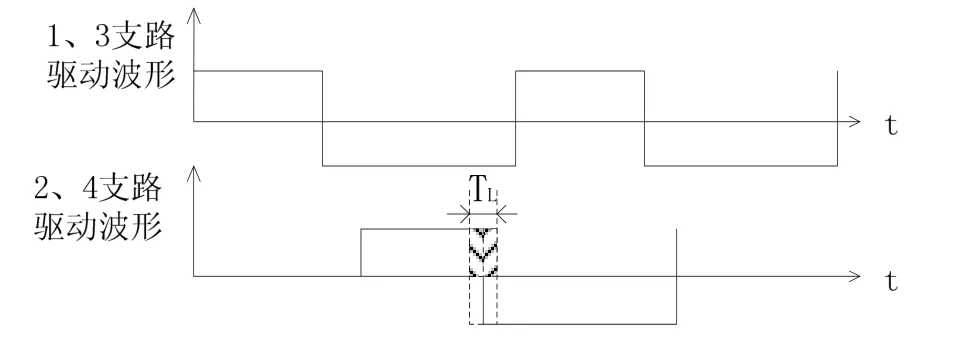
圖5 驅動調節波形圖
當i1+i3的值大于i2+i4的值時,控制器將VT2、VT4的導通時間增加Δt,直至i2+i4的值等于i1+i3的值;當i1+i3的值小于i2+i4的值時,控制器將VT2、VT4的導通時間減少Δt,直至i2+i4的值等于i1+i3的值。
現假設1支路的電流傳感器發生故障,傳送至控制器i1的值為0 A,即:

根據斬波器控制器均衡電流的原理和式(3),控制器最終會將各支路電流調節至如下結果:

而實際情況是:1支路有電流并且理論上等于3支路的電流值i3,結合式(4),就有:

為了避免出現式(5)這種極端情況的出現,我們在控制器電流均衡的程序中為VT2、VT4可調節的導通時間設定一個限值TL/2,為了保證出現支路電流較大差距時也能夠調節均衡,TL/2取值設定為斬波周期的3%左右。但在啟動直流推進電動機的時候,由于負載電阻很小,這時脈寬差別即使很小也會導致支路電流差距很大,造成支路電流過載而報警。
2.3轉速反饋信號故障
轉速信號是由推進電動機帶動一個測速發電機發電,測速發電機輸出的電壓值與轉速信號成正比,將此電壓信號經過霍爾電壓傳感器變換、隔離后就是船用兩相斬波器的轉速反饋信號。
由圖3可知,在船用兩相斬波器控制器中,控制器將轉速給定信號UN與轉速反饋信號的差值,由轉速調節器ASR經過比例、積分運算后輸入給電流調節器ACR,再由電流調節器ACR的輸出信號去控制IGBT模塊驅動波形,達到調節推進電機電樞電壓平均值的目的,從而實現調節推進電機的轉速。船用兩相斬波器的系統結構圖如圖6所示。
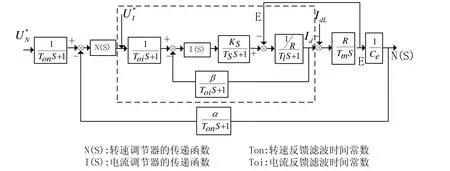
圖6 船用兩相斬波器的系統結構圖
轉速調節器ASR的傳遞函數為:

轉速調節器ASR的時域表達式為:

其中:Kp=Kn為比例系數,KI=1/τ為積分系數
當測速發電機或者霍爾電壓傳感器損壞導致轉速反饋信號故障時,轉速反饋為0,船用兩相斬波器控制器的轉速調節器ASR就變成了一個開環控制的調節器,由式(7)可知,由于轉速反饋為0,誤差一直存在,由于積分的作用,當轉速調節器積分飽和時,轉速環輸出的飽和值輸入給電流環,由電流環根據轉速環輸出的飽和值來調節電流,這就造成推進電機轉速上升至最大值且不可調節。
3 總結及建議
根據前述分析,在船用兩相斬波器的使用維護和維修方面,有以下幾點建議:
1)定期檢查斬波器濾波電容的容值,如不合格應立即更換,否則會造成IGBT模塊損壞。
2)當出現熔斷器熔斷的故障情況時,還需要檢查斬波器的濾波電容、驅動板和IGBT模塊。
3)出現過載報警的故障時,檢查電流傳感器。
4)出現轉速不可調節時,檢查轉速反饋信號。
[1]謝錫成,王堅強.兩相斬波器[J].艦船科學技術,1991,(4):1-12.
[2]陳伯時.電力拖動自動控制系統[M].北京:機械工業出版社,2000.
[3]胡壽松.自動控制原理[M].北京:國防工業出版社,1994.
[4]M.M.Peretz,S.Ben-Yaakov.Time domain identification of PWM converters for digital controllers design[J]. IEEE Power Electron.Spec.Conf.,Orlando,FL,Jun. 2007:809-813.
[5]J.Morroni,R.Zane,D.Maksimovic,Design and implementation of an adaptive tuningsystem based on desired phase margin for digitally controlled DC-DC converters[J],IEEE Trans.Power Electron.,vol.24,No. 2,Feb.2009:559-564.
Analysis on the Failures of Two-phase Direct Current Chopper
Xie Pengbo1,Meisongtao1,Wang Guan2
(1.Wuhan Institute of Marine Electric Propulsion,Wuhan430064,China;2.The Unit 92858 of PLA,Ningbo315812,Zhejiang,China)
This paper introduces the principle of two-phase chopper for marine,and analyzessome common fault of two-phase chopper.Based on the findings,somesuggestions of using and repairing two-phase chopper are proposed.
marine two-phase chopper;fault;repair
TM46
A
1003-4862(2015)10-0055-04
2015-03-14
謝澎波(1977-),男,高工。研究方向:自動控制。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
