
船舶車鐘操縱主機模擬裝置的研制
2015-10-24 03:50:04張少明梁達成潘龍江
船電技術 2015年10期
張少明,梁達成,潘龍江
(1.廣東交通職業技術學院,廣州510800,2.廣東高校船舶自動化集成技術開發中心,廣州510800)
船舶車鐘操縱主機模擬裝置的研制
張少明1,2,梁達成1,潘龍江1
(1.廣東交通職業技術學院,廣州510800,2.廣東高校船舶自動化集成技術開發中心,廣州510800)
介紹了船舶車鐘操縱主機模擬裝置的硬件組成,工作模式,控制程序及監控界面組態。
船舶車鐘PLC人機界面
0 引言
目前國內船舶上使用的車鐘大致有兩類,一類是采用自整角機控制電路顯示傳令,另一類是使用手控凸輪或琴鍵開關等配合指示燈顯示傳令,實踐證明這兩類車鐘弊端比較多。電力推進作船舶的主推進動力成本大大減少。由于其具有環保效果好、機動性高、自動化程度高以及安全可靠性好等特點,正成為新世紀大型水面船舶青睞的推進方式,所以設計用于電力推進的新型船舶車鐘遙控系統有很大的市場空間。該模擬裝置主要實現PLC驅動船舶主動力裝置帶動螺旋槳。船舶主推進動力裝置動力部分采用步進電機模擬現實運轉,運用了車鐘原理、PLC編程語言、步進電機工作原理等相關知識。
1 系統硬件組成與設計
本項目主要研究制作船舶車鐘操縱主機模擬裝置。系統拓撲如圖1所示,該模擬裝置主要實現PLC驅動船舶主動力裝置帶動螺旋槳,船舶主推進動力裝置動力部分采用步進電機模擬其運轉。
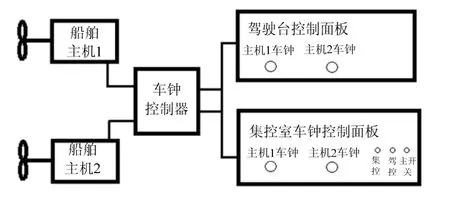
圖1 系統拓撲圖
1.1車鐘
車鐘系統是實現駕駛臺與集控室,集控室與機旁之間進行車令傳送與應答的重要設備,由駕駛臺車鐘,集控室車鐘和機旁車鐘組成。車鐘系統一般有兩種工作模式,一種是操控模式,另一種是傳令模式。操控模式對應于在駕駛臺遙控主機的情況,此時駕駛臺車鐘直接通過邏輯控制單元和轉速控制單元對主機進行自動遙控。傳令模式對應于在集控室或機旁操作的情況,此時,駕駛臺車令首先傳遞到集控室或機旁,輪機員進行車鐘應答后,再對主機進行相應的操作[1]。由于本裝置不需要機旁操作,故取消了集控室與機旁間的車令傳送與應答。
本系統的車鐘由高精度電位器、發光二極管、自鎖按鈕、點動按鈕組成。主機車鐘用于傳送停車,換向和轉速設定等主機操縱指令。車速顯示采用發光二極管,按后退三,后退二,后退一,備車,停車,完車,前進一,前進二,前進三排列。通過旋轉電位器,改變電阻,改變輸入的模擬量,通過PLC的運算,實現轉信號的輸出,通過改變顯示燈的通斷,實現車速的顯示。
系統擁有駕駛臺車鐘和集控室車鐘,駕駛臺車鐘和集控室車鐘用于速度顯示的發光二極管同速度的采用并聯,實現兩地的速度顯示統一。在集控室車鐘還設有集控按鈕,架控按鈕,用于切換控制部位。集控室和駕駛臺的電位器通過外部繼電器接入PLC,采用互鎖。集控室車鐘設有總開關。
1.2PLC的選型
該模擬裝置主要實現PLC驅動船舶主動力裝置帶動螺旋槳,主要借助PLC的高速數據處理能力及PLC的高速輸出能力。PLC具有高速運算及強大的控制能力,而且可改變里面的控制程序,拓展性強,方便制造者添加更多功能[2]。
考慮到系統要求有高速輸入及輸出,含模擬量信號輸入,點數較多。系統選用易控王(兼容三菱FX2n-24MT)。
1.3I/O分配表
系統接線圖局部[3,4],如圖2所示。
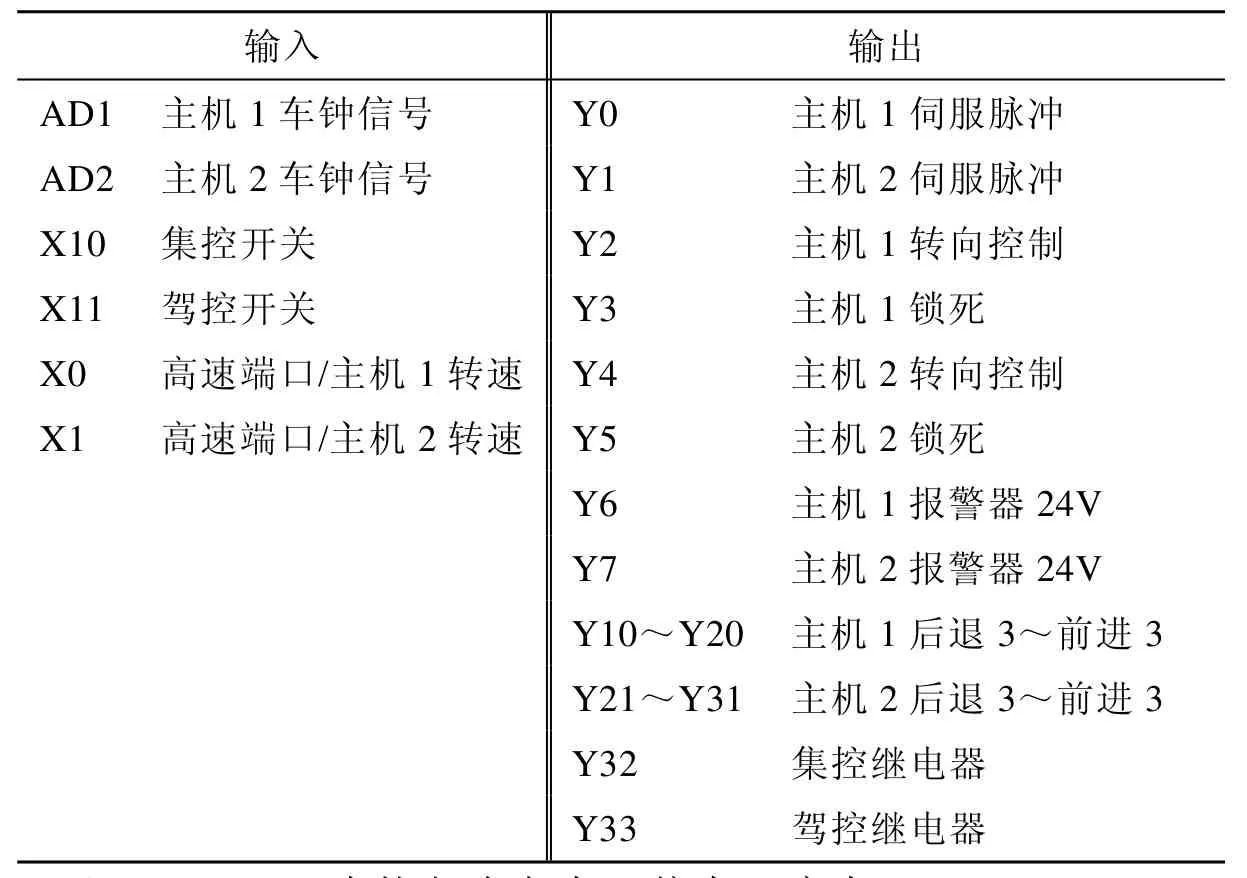
表1 PLC輸入/輸出分配表
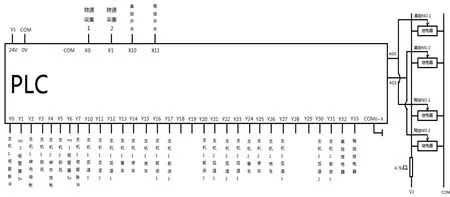
圖2 系統接線圖局部
2 程序與人機界面
2.1程序的運行
使用易控王PLC,模擬量輸入默認存在
D8030/D8031寄存器,與三菱PLC不同[4]。開機進入程序時的程序流程如圖3。
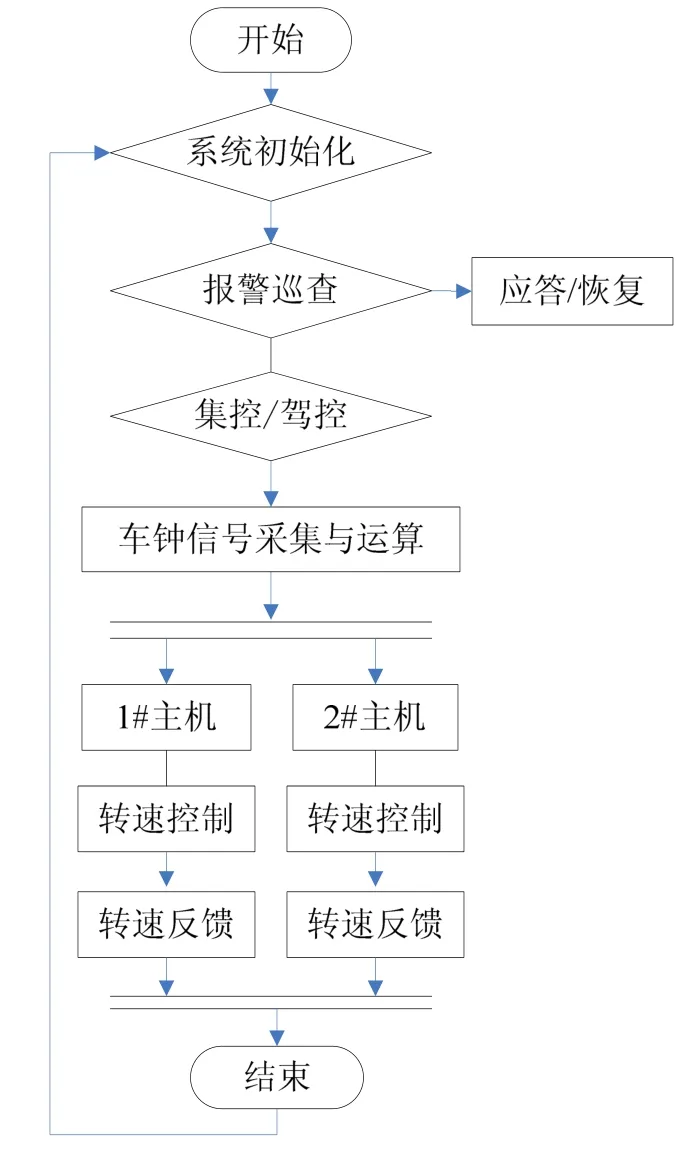
圖3 程序流程圖
在開機時系統初始化后,如果集控室兩個車鐘的不在停車位或任一車鐘的不在停車位時便會發生報警,必須將發生報警的車鐘旋至停車位,解除報警方可進入主程序。
由于電位從最小旋至最大時的輸入的電壓值0~10V,對應PLC采樣數值為0~4000(因為電位器的阻值非線性,電位器在中間位置時采樣值為1500,而非2000)經測算分配大致如表2,不同電位器實測值有變化,可以根據實際情況在程序中進行處理。
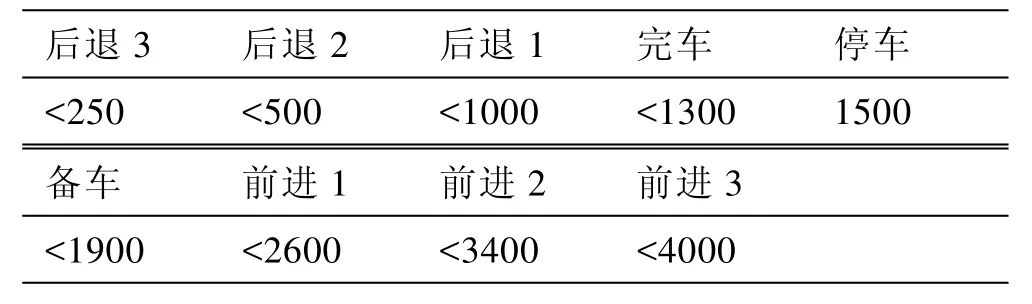
表2 車鐘電位器采樣信號分配表
在后退3~后退1時輸出控制信號時,須將采樣數值轉為負數處理,此問題在選用多檔位開關代替電位器即可將采樣信號平均分配。
經PLC運算完采樣信號后,每段可輸出轉速驅動信號和指示燈信號,并通過光電編碼器將主機轉速轉換成脈沖信號反饋回PLC的輸入端口。
在停車位時不輸出脈沖,輸出一個主機鎖死信號,使主機不能手動盤車。在備車位和完車位只輸出相應的指示燈,不輸出其他信號。此時可手動旋轉主機即盤車。
2.2人機界面組態
本系統有采用力控Forcecontrol 6.1軟件進行人機界面(HMI)的制作,在上機位端進行主機轉速狀態的監視,如圖4所示,監控界面包括主機車鐘狀態顯示,主機轉速顯示,速度曲線與歷史數據等參數。
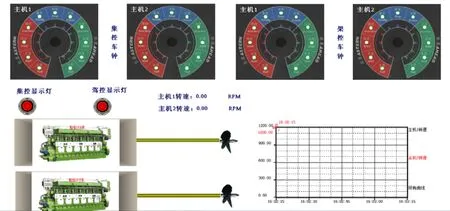
圖4 人機界面
3 小結
隨著內河船舶自動控制技術的逐步推進,海船機艙自動控制系統基本為進口設備,本系統可以應用在實際內河船舶或小型電推船舶車鐘自動控制系統中[6],裝置成本低,控制靈活,可拓展性強,且維護方便,將成熟的自動控制技術在內河船舶進行推廣和使用,可以提高內河船舶及小型船舶機艙自動控制技術,還可應用于在實訓教學或船舶模型技術展示等。
[1]李世臣,徐善林,船舶機艙自動化[M].大連:大連海事大學出版社,2012.
[2]殷慶縱,李洪群.可編程控制器原理與實踐(三菱FX2N系列)[M].北京:清華大學出版社,第1版,2010.3.
[3]鄭輯光.過程控制系統[M].北京:清華大學出版社,2012.12.
[4]程樹康.步進電動機及其驅動控制系統[M].哈爾濱:哈爾濱工業大學出版社,第l版,2006.12.
[5]三菱微型可編程控制器.FX系列編程手冊[M]. 2006.
[6]吳志良,林葉春,孫旭清.船舶電氣[M].大連:大連海事大學出版社,2012.
Simulation Device forship Telegraph Maneuvering Power Plant
Zhangshaoming1,2,Liang Dacheng1,Pan Longjiang1
(1.Guang Dong Communication Polytechic,Guangzhou 510800,China;2.Guangdong Universityship Automationsystem Integration Engineering Technology Development Center,Guangzhou 510800,China)
This paper introduces the hardware,working mode,control procedure and monitoring interface configuration of theship telegraphsimulation device.
ship telegraph;programmable logic controller,HMI
U666.15
A
1003-4862(2015)10-0067-03
2015-08-14
項目來源:2015年度廣東大學生科技創新培育項目(攀登計劃),編號:pdjh2015b0677
張少明(1974-),男,副教授。研究方向:輪機工程技術。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
