基于運動相對性的六足機器人機體運動規劃
2015-10-29 03:05:15李滿宏張明路張建華張小俊
中國機械工程 2015年3期
關鍵詞:規劃
李滿宏 張明路 張建華 張小俊
河北工業大學,天津,300130
基于運動相對性的六足機器人機體運動規劃
李滿宏張明路張建華張小俊
河北工業大學,天津,300130
將處于支撐相的六足機器人視為時變的并聯機構進行運動學分析,給出了姿態給定情況下機體工作空間的確定方法及邊界方程。在此基礎上基于運動相對性原理,提出將機體的運動規劃轉化為足端軌跡規劃的方法,從而簡化機體運動規劃中逆解的求取問題,并通過仿真與實驗進行了驗證。結果表明:六足機器人在支撐相內機體的工作空間為至多是支撐腿條數個空心球體的交集,利用運動相對性原理對支撐相內機體的運動規劃問題進行轉化簡便、可行。
六足機器人;工作空間;相對運動;運動規劃
0 引言
六足機器人具有豐富的步態和冗余的肢體結構,能適應復雜的地理環境且具有較高的可靠性,在排險、軍事、服務、農業等領域有著廣闊的應用前景[1-2]。自20世紀80年代中期以來,國內外學者通過研究、模仿生物系統的結構、運動方式和控制方式,相繼研制成功Genghis、Ariel、SPR-robot等多種性能卓越的六足機器人[3-5]。伴隨著機器人的研制,六足機器人運動學在穩定性判據、步態規劃和軌跡規劃等方面也取得了豐碩的成果[6-8]。
六足機器人在運動過程中會存在擺動相和支撐相[9]。擺動相要解決的問題是運動過程中足端軌跡規劃、避碰和時間節拍問題,而支撐相需要解決的問題則是各腿協調一致實現機體的移動[10]。目前,針對支撐相運動學研究相對較少,且主要集中在機體的工作空間和運動規劃。六足機器人在運動過程中支撐腿條數及其落足點具有不確定性,故可將處于支撐相的六足機器人視為時變并聯機構。雖然傳統的并聯機構理論對于常規并聯機構工作空間和運動規劃的求解相對簡單,但其并不完全適用于此種特殊機構,對該機構進行運動學建模及求解難度相對較大。針對六足機器人機體的工作空間,文獻中多采用蒙特卡羅等數值解法[11-13],其理論價值與實用意義相對有限;而對于六足機器人機體的運動規劃,多為解決機器人行進過程中的避障與路徑優化問題[14-16],很少考慮如何高效求取逆解以實現規劃軌跡。
本文擬對六足機器人機體工作空間進行分析,在此基礎上基于運動相對性原理將支撐相內機體的運動規劃轉化為機器人足端軌跡規劃,以簡化機體運動規劃中逆解的求取問題,實現機體位姿的動態調整,并利用仿真與實驗對分析結果進行綜合驗證。
1 工作空間
處于支撐相的六足機器人可視為一并聯機構,其中,機體為動平臺,由落足點構成的支撐多邊形為定平臺。當落足點固定時,考慮并聯機構各支鏈與動、定平臺連接點間的相對運動,可視支撐腿為類Stewart并聯機器人[17]的支鏈,則六足機器人機體工作空間即為類Stewart并聯機器人動平臺的工作空間。
為便于分析,建立圖1所示的運動學坐標系,其中C為軀干質心,Ai為第i條支撐腿的末端,即落足點,Bi為第i條支撐腿與機體的連接點。各坐標系坐標軸滿足右手螺旋法則,ΣC為固定在機體質心上的機體坐標系Cxyz,z坐標軸垂直于機體平面背離重力方向,y坐標軸沿著機體軸線指向前進方向,ΣO為固定在地面上的參考坐標系Oxyz,L1、L2分別為股節和脛節的長度,θi為股節與脛節的夾角,實線和虛線分別表示處于支撐相與擺動相。
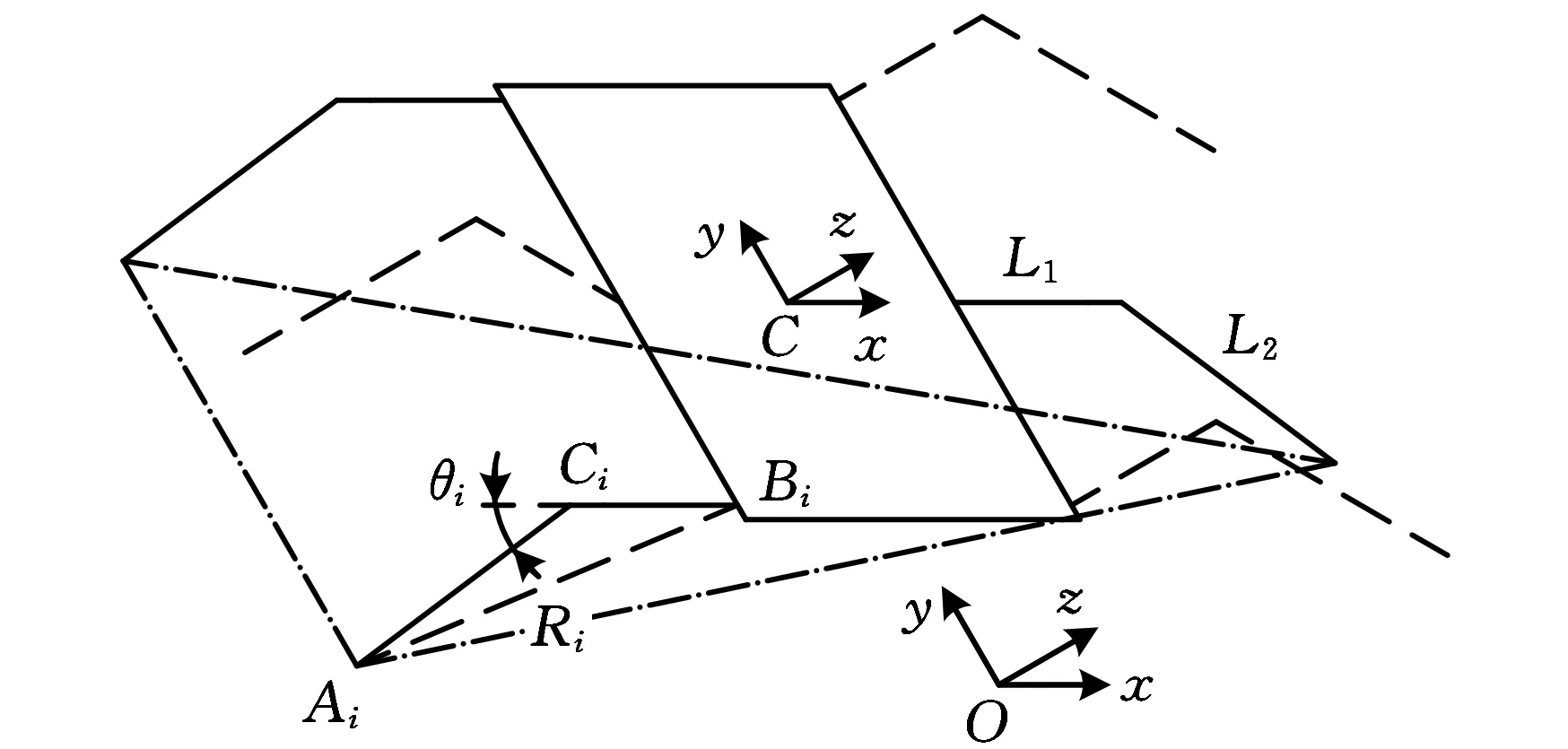
圖1 六足機器人運動學坐標系
定義OPAi、OPBi、OPC分別為Ai、Bi與機體質心C在ΣO中的位置矢量,CPBi為Bi在ΣC中的位置矢量,Ri為Ai與Bi之間的距離。機體坐標系ΣC相對于參考坐標系ΣO的姿態矩陣ORC可用三個歐拉角α、β、γ表示為
q11=cosαcosβ
q12=cosαsinβsinγ-sinαcosγ
q13=cosαsinβcosγ+sinαsinγ
q21=sinαcosβ
q22=sinαsinβsinγ+cosαcosγ
q23=sinαsinβcosγ-cosαsinγ
q31=-sinβ
q32=cosβsinγ
q33=cosβcosγ
根據矢量在坐標系間的變換關系,可得
OPBi=OPc+ORCCPBi
(1)
由于OPAi為Ai在ΣO中的位置矢量,于是有

(2)
如OPc為(x,y,z),通式NsM表示M點在坐標系ΣN下s軸上的分量,由式(1)、式(2)可得
(3)
xi=OxAi-q11CxBi-q12CyBi-q13CzBi
yi=OyAi-q21CxBi-q22CyBi-q23CzBi
zi=OzAi-q31CxBi-q32CyBi-q33CzBi
顯而易見,式(3)為以Oi(xi,yi,zi)為球心,Ri為半徑的球面方程。球心Oi的坐標由OPAi、CPBi和ORC決定。實際情況中,落足點的位置OPAi往往已知,CPBi由機器人的結構參數決定。因此,球面方程的球心通常僅與機體相對地面的姿態矩陣ORC有關。
在△AiBiCi中,根據余弦定理存在
(4)
于是有
(5)
綜上可知,如果六足機器人的支撐腿存在n條,且給定了機體的姿態,那么六足機器人機體的工作空間是n個以Oi(xi,yi,zi)為球心、內徑為Rimin、外徑為Rimax的空心球體的交集。
2 機體運動規劃
機器人在支撐相內機體的運動規劃問題實質上為給定機器人機體位姿,快速求解相應關節轉角,實現機體位姿動態調整的問題。對機器人進行運動學分析直接影響著機體平臺的運動性能以及機器人整體的協調性、靈活性。
六足機器人在運動過程中支撐腿條數及其落足點具有不確定性,故可將處于支撐相的六足機器人視為時變并聯機構。由于該機構支鏈條數與定平臺參數在不斷變化,當采用常規的并聯機器人逆解求取方法求解該機構的逆解時,需根據支鏈條數與定平臺參數實時調整高次三角方程組中方程的個數與參數,計算繁瑣,因而常規的并聯機器人逆解求取方法并不完全適用于此種機構逆解的求取。
運動的相對性是機械運動的一種性質,即同一個物體是運動還是靜止,取決于所選的參照物。如人騎在馬上向前奔跑的瞬間,在騎馬人看來,馬的身體沒動,馬蹄在動;而在路人看來,馬蹄沒動,馬的身體在動。
得益于上述事實,發現機器人機體的運動軌跡與足端運動軌跡存在著密切聯系。機器人機體在支撐相內移動過程中的每一時刻,落足點Ai與支撐腿和機體連接點Bi的相對位置是固定的。從固連在大地上的參考坐標系ΣO來看Ai是固定不動的,而從固連在機器人上的機體坐標系ΣC上看來Bi是固定不動的,于是可將參考坐標系中機體的運動軌跡轉化為機體坐標系中足端Ai的運動軌跡。為簡化六足機器人機體運動規劃中逆解的求取,可將機器人規劃的機體運動軌跡轉化為足端軌跡進行逆解求取,不僅避免了常規方法中高次三角方程組的調整與求解,而且可根據支鏈條數靈活應用各支鏈的解析逆解快速求取整個并聯機構的逆解。


圖2 運動軌跡間關系
設機體質心在機體工作空間內的運動軌跡SC(t)為
(6)
曲線上任意一點為某一特定時刻質心在參考坐標系ΣO中的位置矢量OPC。
根據矢量在坐標系間的變換關系,可得
OPBi=OPC+ORCCPBi
(7)
于是有
(8)
則Si(t)的參數方程為
(9)
(10)
于是存在
(11)
(12)
根據矢量在坐標系間的變換關系,可得
OPAi=OPc+ORCCPAi
(13)

(14)
(15)

3 仿真與實驗
針對六足機器人機體的工作空間和運動規劃,利用設計的樣機(圖3)進行了相應的仿真與實驗。樣機的結構尺寸如圖4所示。機體寬度W為50 cm,機體長度L為100 cm。機器人6條結構相同的腿對稱布置于機體兩側,其中股節長度L1為30 cm,脛節長度L2為50 cm。假設機器人開始運動時機體水平,支撐腿的股節水平且其軸線與機體中軸線垂直,股節與脛節的夾角θi均為53°。為計算方便,將機體坐標系建于機體質心之上,參考坐標系建于質心正下方的大地上,則A1、A2、A3在ΣO中的坐標分別為(85,0,0)cm、(-85,-50,0)cm、(-85,50,0)cm,B1、B2、B3在ΣC中的坐標依次為(25,0,0)cm、(-25,-50,0)cm、(-25,50,0)cm。受機械結構限制,θi的取值為0°~90°。根據式(5),可求得58 cm≤Ri≤80 cm。

圖3 六足機器人樣機
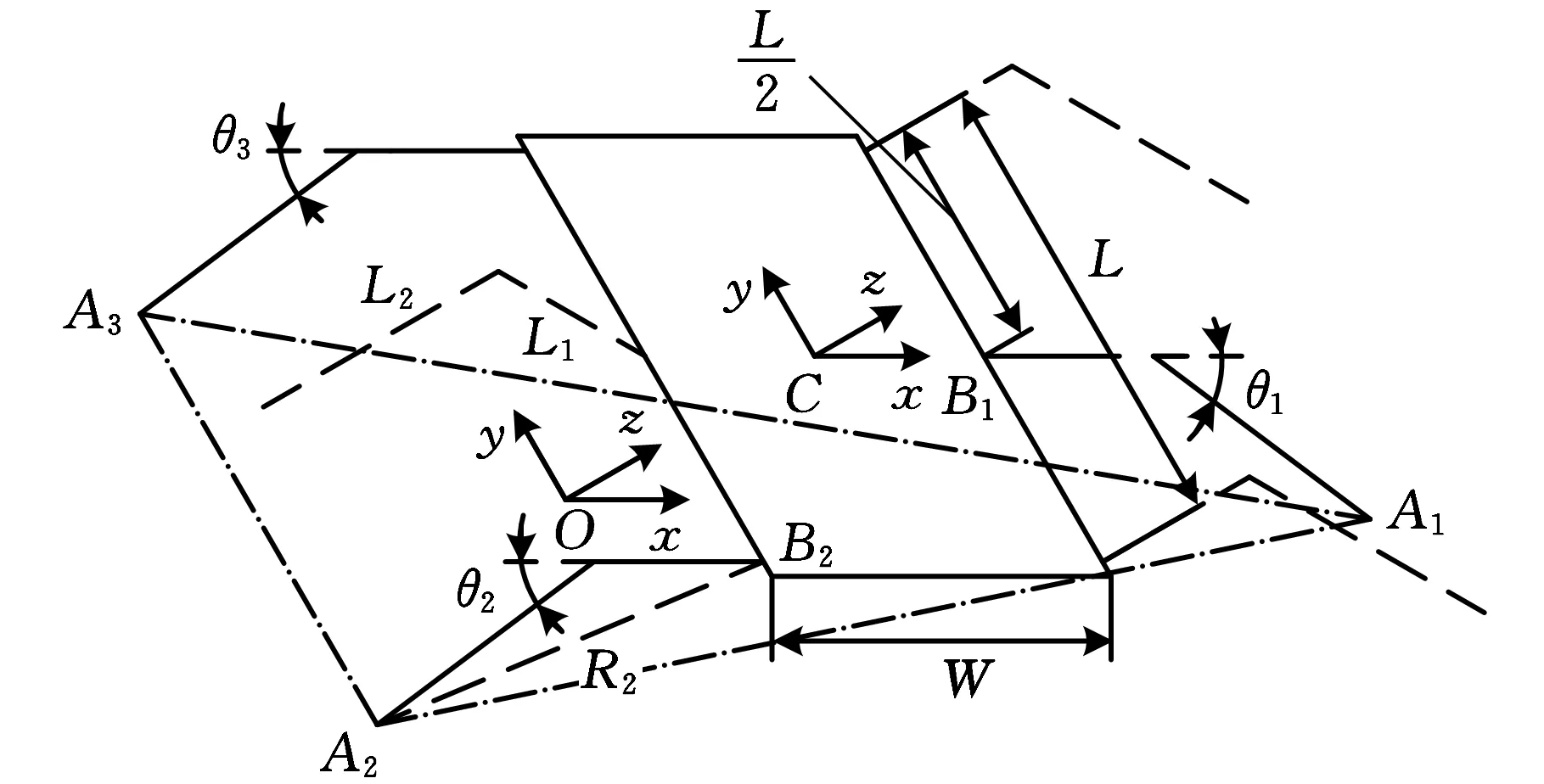
圖4 六足機器人參數
當決定機器人機體相對于參考坐標系姿態的歐拉角α、β、γ均取10°時,機器人機體的工作空間如圖5所示,為三個空心球體的交集。圖中星形為空心球體球心,菱形為機體質心,實線為支撐腿,虛線為擺動腿,三個空心球體的球心依次為(60.75,-4.28,4.34)cm、(-67.82,3.03,4.21)cm、(-53.69,5.52,-12.89)cm。

圖5 歐拉角均取10°時機體的工作空間
當α、β、γ均取0°時,機體平面與地面平行,且左側兩支撐腿具有相同的結構,則可認為在與機體坐標系y軸平行的方向上機器人形成了平行四邊形機構,產生了虛約束。該虛約束對機器人機體的工作空間不會產生影響。因此,求得的空心球體的球心中會有兩個重合,機體的工作空間為兩個空心球體的交集,如圖6所示,球心依次為(60,0,0)cm、(-60,0,0)cm。此例表明了上述機體工作空間確定方法的正確性。
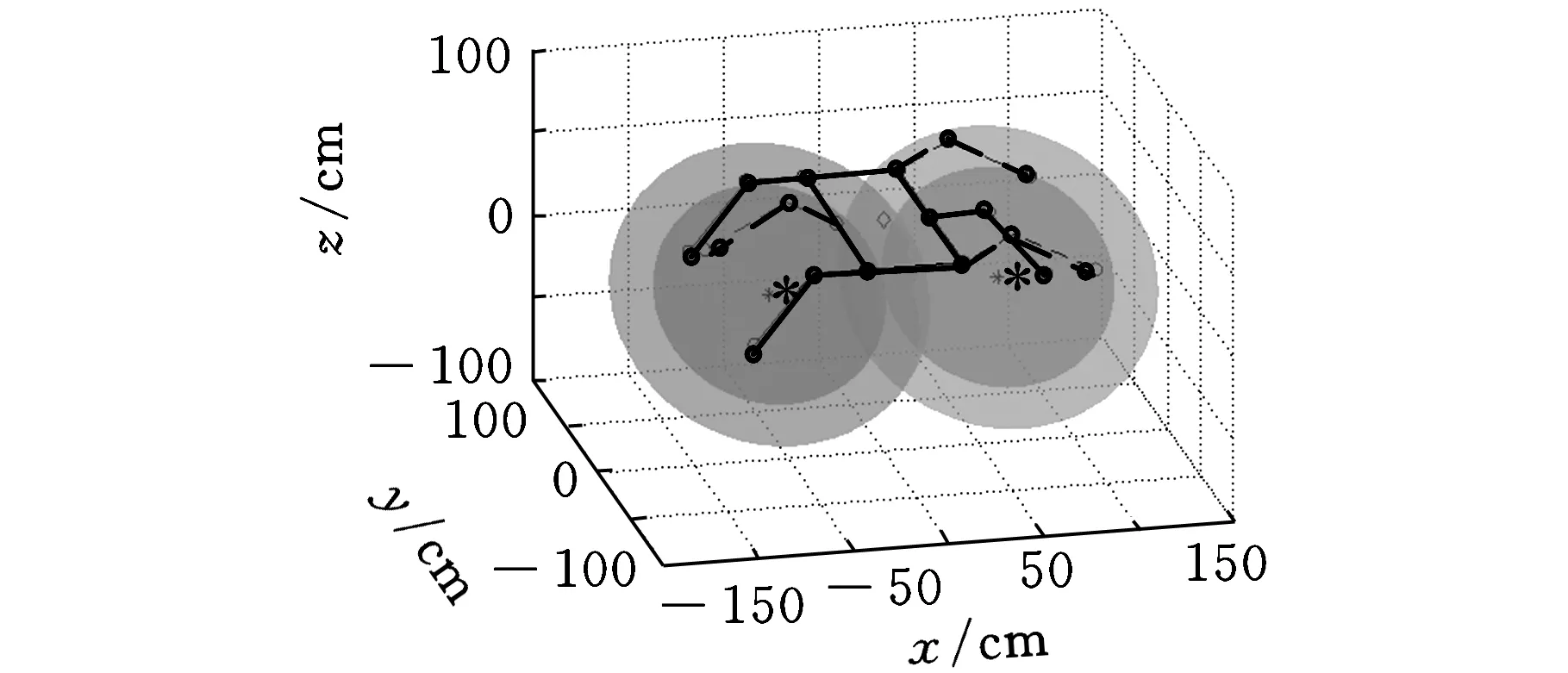
圖6 歐拉角均取0°時機體的工作空間
如機器人機體工作空間內的質心軌跡SC(t)為
(16)
t∈(0,4π)

圖7 六足機器人的運動軌跡
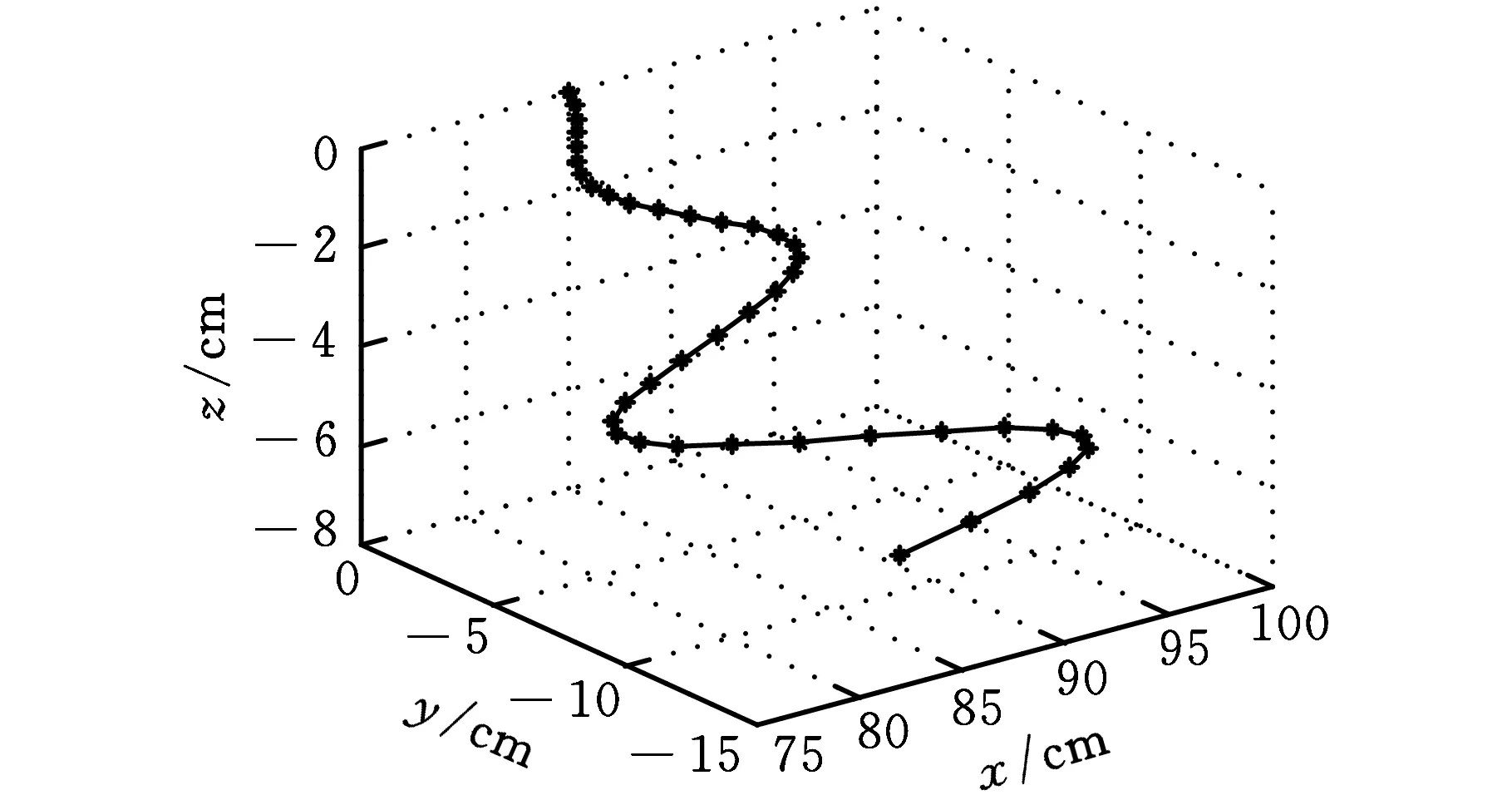
圖8 六足機器人的足端軌跡
為進一步驗證本文機體運動規劃方法的有效性,采用該方法利用設計樣機分別進行了調姿和步行實驗。調姿實驗中,機器人六足均處于支撐相且各落足點保持不變,機器人機體質心位置固定,僅將歐拉角中的β由0°調整為10°。圖9a所示為機器人調姿實驗的初始狀態,其機體與各股節均處于水平狀態。圖9b所示為調姿實驗的終止狀態,β已調整為10°。在整個調姿過程中,機器人機體運動平穩,各關節動作協調。在機器人步行實驗中,機器人以圖9c所示的初始狀態,向正前方前進50cm到達圖9d所示的位置,整個運動過程連貫、平穩。機器人的調姿和步行實驗表明,應用本文所提出的機體運動規劃方法可實現時變并聯機構機體位姿的動態調整,該方法準確、有效,能夠滿足六足機器人實時控制需求。
(a)調姿初始狀態(b)調姿終止狀態

(c)步行初始狀態(d)步行終止狀態圖9 調姿和步行實驗
4 結論
(1)對處于支撐相的六足機器人進行運動學分析時,可將其抽象為時變的并聯機構,借鑒并聯機器人的相關理論以簡化分析。
(2)六足機器人機體的工作空間與支撐腿的條數、落足點的位置、機器人自身的結構參數和機體的姿態有關。機器人機體姿態給定時,其工作空間為至多為支撐腿條數個空心球體的交集。
(3)基于運動的相對性原理,可將機器人機體的運動規劃問題轉化為各支撐腿的足端軌跡規劃問題,以簡化機體運動規劃中逆解的求取。機器人機體的運動軌跡在其工作空間內連續時,轉化的各支撐腿的足端軌跡連續。
(4)仿真與實驗結果表明,本文所闡述的方法準確、可行,且便于控制算法的編寫。
[1]魏武, 李金龍, 任回興. 基于吸盤負壓吸附的六足爬墻機器人關節轉矩優化分配[J]. 中國機械工程,2013, 24(10): 1289-1295.
WeiWu,LiJinlong,RenHuixing.JointTorqueDistributionofaSix-leggedWall-climbingRobotwithNegativePressureAdsorptionSucker[J].ChinaMechanicalEngineering, 2013, 24(10): 1289-1295.
[2]陳甫. 六足仿生機器人的研制及其運動規劃研究[D]. 哈爾濱: 哈爾濱工業大學, 2009.
[3]黃麟, 韓寶玲, 羅慶生, 等. 仿生六足機器人步態規劃策略實驗研究[J]. 華中科技大學學報(自然科學版), 2007, 35(12): 72-75.
HuangLin,HanBaoling,LuoQingsheng,etal.ExperimentalStudyonHexapodBiomimeticRobot’sGaitPlanning[J].J.HuazhongUniv.ofSci. &Tech. (NatureScienceEdition), 2007, 35(12): 72-75.
[4]BrooksRA.ARobotThatWalks:EmergentBehaviorsFromaCarefullyEvolvedNetwork[J].NeuralComputation, 1989, 1: 253-262.
[5]KorayK,GeorgeG.ModelingandSimulationofanArtificialMuscleandItsApplicationtoBiomimeticRobotPostureControl[J].RoboticsandAutonomousSystems, 2002, 41(4): 225-243.
[6]ErdenMS,KemalL.FreeGaitGenerationwithReinforcementLearningforaSix-leggedRobot[J].RoboticsandAutonomousSystems, 2008, 56: 199-212.
[7]PortaJM,CelayaE.ReactiveFree-gaitGenerationtoFollowArbitraryTrajectorieswithaHexapodRobot[J].RoboticsandAutonomousSystems, 2004, 47: 187-201.
[8]王剛, 張立勛, 王立權. 八足仿蟹機器人步態規劃方法[J]. 哈爾濱工程大學學報, 2011, 32(4): 486-491.
WangGang,ZhangLixun,WangLiquan.ResearchonaGaitPlanningMethodforaCrab-likeOctopodRobot[J].JournalofHarbinEngineeringUniversity, 2011, 32(4): 486-491.
[9]孟偲, 王田苗, 丑武勝, 等. 仿壁虎機器人的步態設計與路徑規劃[J]. 機械工程學報, 2010, 46(9): 32-37.
MengCai,WangTianmiao,ChouWusheng,etal.GaitDesignandPathPlanningforaGecko-likeRobot[J].JournalofMechanicalEngineering, 2010, 46(9): 32-37.
[10]陽如坤, 王泰耀. 全方位六足步行機器人運動規劃的相對運動算法[J]. 機器人, 1992, 14(5): 44-47.
YangRukun,WangTaiyao.ARelativeMotionControlAlgorithmforOmnidirectionalSix-leggedRobot[J].Robot, 1992, 14(5): 44-47.
[11]宋孟軍, 張明路. 仿生移動機器人并聯機構運動學正解的魚群算法求解[J]. 中國機械工程, 2012, 23(9): 1029-1036.
SongMengjun,ZhangMinglu.AnalysisofForwardKinematicsforBionicandMobileRobotwithAFSA[J].ChinaMechanicalEngineering, 2012, 23(9): 1029-1036.
[12]張建富, 王健健, 馮平法, 等.并聯機器人可操作度分析的蒙特卡羅方法[J]. 農業機械學報, 2013, 44(7): 269-273.
ZhangJianfu,WangJianjian,FengPingfa,etal.MonteCarloMethodforManipulabilityAnalysisofParallelManipulators[J].TransactionsoftheChineseSocietyforAgriculturalMachinery, 2013, 44(7): 269-273.
[13]沈惠平, 馬履中, 朱小蓉, 等. 全解耦并聯機構的運動學與工作空間分析[J]. 農業機械學報, 2005, 36(11): 124-127.
ShenHuiping,MaLvzhong,ZhuXiaorong,etal.AnalysesofKinematicsandWorkspacefora3-DOFFullyDe-coupledParallelMechanism[J].TransactionsoftheChineseSocietyforAgriculturalMachinery, 2005, 36(11): 124-127.
[14]LocVG,RohSG,KooIM,etal.SensingandGaitPlanningofQuadrupedWalkingandClimbingRobotforTraversinginComplexEnvironment[J].RoboticsandAutonomousSystems, 2010, 58: 666-675.
[15]PratiharDK,DebK,GhoshA.OptimalPathandGaitGennerationsSimultaneouslyofaSix-leggedRobotUsingaGA-fuzzyApproach[J].RoboticsandAutonomousSystems, 2002, 41: 1-20.
[16]HaribKH,UllahAS,HammamiA.Ahexapod-basedMachineToolwithHybridStructure:KinematicAnalysisandTrajectoryPlanning[J].InternationalJournalofMachineToolsandManufacture, 2007, 47(9): 1426-1432.
[17]劉辛軍, 張立杰, 高峰. 基于AutoCAD平臺的六自由度并聯機器人位置工作空間的解析求解方法[J]. 機器人, 2000, 22(6): 457-464.
LiuXinjun,ZhangLijie,GaoFeng.GeometricalDeterminationofWorkspacefor6-DOFParallelManipulatorsBasedonAutoCADPlatform[J].Robot, 2000, 22(6): 457-464.
(編輯郭偉)
Body Motion Planning for a Hexapod Robot Based on Relative Motion
Li ManhongZhang MingluZhang JianhuaZhang Xiaojun
Hebei University of Technology,Tianjin,300130
A hexapod robot in support phase was regarded as a time-varying parallel mechanism to make the kinematics analysis. The determination methods and boundary equations of the workspace were described herein for the hexapod robot whose body posture was given. Based on the relative motion theory, a method to transform body motion planning into foot trajectory planning was presented to simplify the issue of body motion planning. Simulation and experimental results show that the workspace for the hexapod robot in support phase is the intersection of the hollow spheres whose number is up to the number of the support legs and using the principles of relative motion to transform the issue of body motion planning in support phase it is simple and feasible.
hexapod robot; workspace; relative motion; motion planning
2013-10-27
國家高技術研究發展計劃(863計劃)資助項目(2012AA041508);天津市自然科學基金資助項目(12JCYBJC12100)
TP242DOI:10.3969/j.issn.1004-132X.2015.03.006
李滿宏,男,1987年生。河北工業大學機械工程學院博士研究生。主要研究方向為機器人運動學。張明路,男,1964年生。河北工業大學機械工程學院教授、博士研究生導師。張建華,男,1979年生。河北工業大學機械工程學院副教授。張小俊,男,1979年生。河北工業大學機械工程學院副教授。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41