奔跑仿生機構的運動學模型構建與分析
2015-10-29 02:33:25
中國機械工程 2015年20期
關鍵詞:模型
宋孟軍1,2 丁承君2 張明路2
1.天津職業技術師范大學,天津,300222 2.河北工業大學,天津,300130
奔跑仿生機構的運動學模型構建與分析
宋孟軍1,2丁承君2張明路2
1.天津職業技術師范大學,天津,3002222.河北工業大學,天津,300130
對獵豹的奔跑機構的骨骼肌肉系統的運動學模型及運動學特性進行了研究。基于已有數據,對獵豹的前后肢建立了機構模型,對其奔跑的運動過程進行仿真,計算并描述其趾端運動軌跡;結合骨骼肌肉的位置參數與已構建的運動學模型,對獵豹的骨肌坐標系統進行建模,對肌肉肌群的長度變化進行計算;進行骨肌坐標系統的運動仿真,并利用肌肉力計算模型,求解了獵豹前后肢各關節的力矩變化。基于已有解剖學數據對哺乳動物的高速運動特性從仿生學角度進行了分析,為高速奔跑機構仿生機理的實現提供了切實的數據支持,對獵豹高速奔跑的運動學特性進行了充分研究。
機構;運動學;獵豹;運動生物力學;運動學正解
0 引言
為實現移動機器人的高速運動,運動生物力學已經成為眾多學者目前研究的重點,如麻省理工學院仿生機器人實驗室研制的仿生豹機器人,其奔跑速度可以達到22 km/h,能量利用效率(COT)高達52%[1],孫立寧等[2]研制的基于獵豹骨肌系統模型的仿生氣動機器豹,可以實現一定速度的快速奔跑。因此,模仿生物(如獵豹)進行靈活、高速運動,不僅在生物醫療、競技體育領域,而且在仿生機器人領域取得了豐碩的研究成果[3-6]。
目前獵豹等哺乳動物的骨肌坐標系統的建立并不完善,有的模型過于簡單[7],并不能充分體現哺乳動物生物力的作用特點,因此,本文主要針對獵豹的運動特點進行骨骼肌肉坐標系統的建立,并基于運動學模型對獵豹的運動特性進行分析。
1 奔跑數據
本文以獵豹為研究對象,對其骨骼肌肉系統進行運動學建模,研究其高速奔跑時的運動學特性。獵豹是貓科動物的一種,一般軀干長1~1.5 m,尾長0.6~0.8 m,肩高0.7~0.9 m,體重50~80 kg[8],奔跑時速可達120 km/h。筆者依據獵豹高速(29 m/s)奔跑時的一組高分辨率圖片展開相應的研究,并以一只年齡為6.5歲、體重為45 kg的成年獵豹的體征數據進行相應的骨肌系統運動學建模,所得數據見表1。
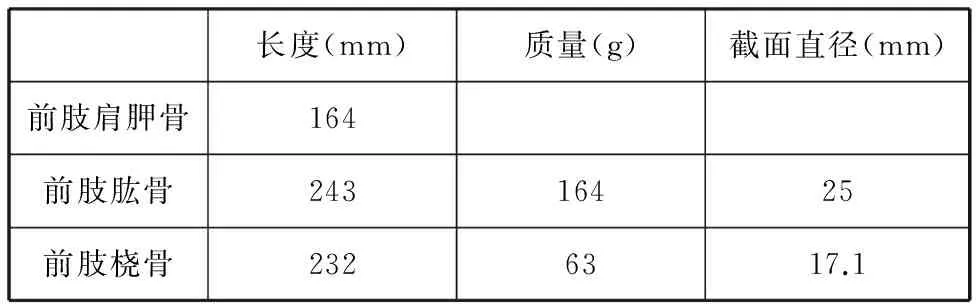
表1 所研究獵豹的體征參數[8-9]
利用表1所測定計算的數據,對獵豹的骨骼及關節角度在高速奔跑過程中的變化進行標定,如圖1所示。圖1由攝像機以每秒1200幀的速度對焦在獵豹上獲得,圖1所示為獵豹在0.3~0.6 s內,完整地奔跑完一個周期所截取的圖像。

圖1 骨骼及關節的變化標定
2 機構奔跑模型的構建與分析
由表1和圖1可知,獵豹的前肢機構共由4根長骨和4個關節組成,后肢機構共由3根長骨和3個關節組成,為典型的串聯機構。其運動學模型如圖2所示。圖中,αsc為肩胛關節角度,αsh為肱骨關節角度,αel為肘關節角度,αwr為腕關節角度,αhi為臀關節角度,αkn為膝關節角度,αta為踝關節角度。

(a)前肢機構模型
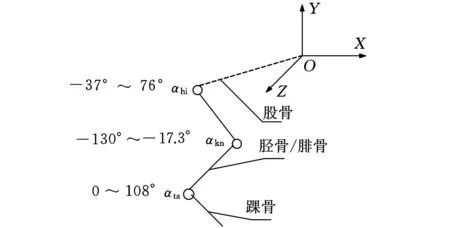
(b)后肢機構模型圖2 仿生機構分布模型
圖2中,OXYZ為機身基坐標系,位于機身上平面的幾何中心位置,關節角度符號左側為角度變化范圍。基于坐標變換方法,利用圖2中的機構模型,可列出前后肢機構的運動學方程:
Tforelimb=TscapularTshoulderTelbowTwristTtoe
(1)
Thindlimb=ThipTkneeTankleTtoe
(2)
T=A1A2…Ai
(3)
式中,i為齊次變換的個數。
同時,本文對獵豹完整奔跑過程的一個周期進行標定,共標定30組數據,前肢運動實測結果如圖3所示。

圖3 前肢運動序列
由圖3可知,獵豹在奔跑過程中,其前肢大部分時間均處于懸空擺動狀態,隨身體強大的慣性向前邁進,由實測與仿真結果發現,圖3中,第2~第4步為獵豹前肢著地支撐運動階段,與整個運動周期的比值為3/30,即獵豹在奔跑過程中,前肢著地時間約占整個運動周期的1/10,著地時間很短。其趾骨末端運動軌跡如圖4所示。
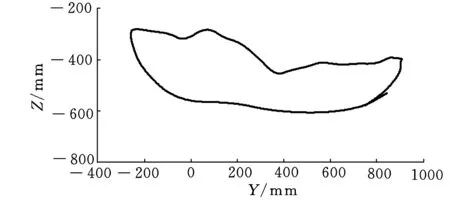
圖4 前肢末端運動軌跡
由圖4可知,對于本次所測數據,獵豹的步態的最高點與最低點相差約350 mm,即獵豹前肢的步幅高度約350 mm。
在運動過程中,后肢對獵豹的奔跑同樣起著重要的推動作用,利用所測的30組運動數據,對獵豹奔跑的后肢運動序列進行后肢運動學建模,如圖5所示。

圖5 后肢運動序列
圖5中,獵豹后肢在運動過程中,其著地時間同樣約占整個運動周期的1/10,且著地點在身體軀干外側。前肢末端的運動軌跡如圖6所示。

圖6 后肢末端運動軌跡
由圖6可知,獵豹后肢在奔跑過程中有較為明顯的后蹬加速運動,從而為獵豹的高速前行提供足夠的推力。
獵豹在實際奔跑過程中,始終有一條腿著地,此時這條腿將與整體機身構成串聯機構系統,因此獵豹在高速運動實際是串聯機構的交替動作。
由圖4和圖6的軌跡變化,可以清晰地觀測到獵豹在結束著地運動的過程中,均具有短暫的能量集中釋放,這與獵豹身體柔韌性密切相關,使得獵豹在高速奔跑時脊柱能夠實現能量的存儲與釋放,從而提高獵豹高速奔跑的效率,其中脊柱及其附連肌肉發揮了重要的作用,由于篇幅有限,暫未對獵豹整體進行相關數據的分析。
3 運動生物力學模型的構建與分析
由于肌肉力在獵豹高速運動過程中發揮著重要的作用,故有必要依據肌肉附著點、肌肉力臂以及生理橫斷面積(PCSA)等生物力學參數對獵豹的運動生物力學模型進行建模,其中,肌肉附著點、肌肉力臂以及生理橫斷面積等數據來自文獻[8-10],同時結合哺乳動物如中型犬、貓等解剖資料,運用相似測量與計算的方法推算得到。同樣利用坐標變換方法,基于前述數據,構建圖7所示的骨肌坐標系統模型。

圖7 骨肌坐標系統模型
圖7共對前后四肢及其上20塊不同的肌肉進行了運動學模型的構建。其具體分布見表2。
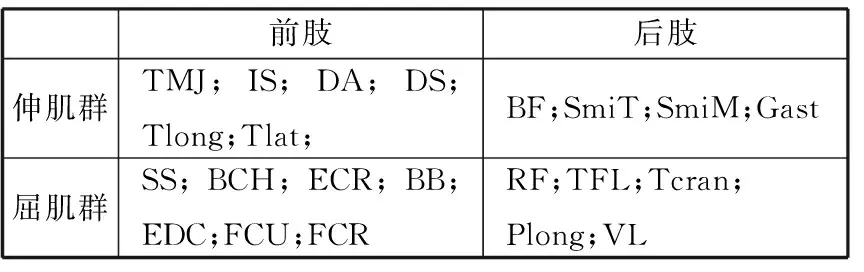
表2 前后肢肌肉分布
注:SS岡上肌;IS岡下機;DA三角肌肩峰;DS三角肌;TMJ大圓肌;Tlong肱三頭肌長頭;BB肱二頭肌;ECR橈側伸腕肌EDC指總伸肌;UL腕外側;FCU屈腕肌;FCR橈側腕屈肌;BF股二頭肌;RF股直肌;SemiM半膜肌;SemiT半腱肌;TFL闊筋膜張肌;Gast腓腸肌;Vlat股外側肌;Plong腓骨長肌;Tcran 脛骨前肌。
獵豹在奔跑過程中,各肌群發揮重要的作用,因此,有必要對其肌肉力線長度的變化進行分析,進而對其關節力矩進行研究,為更好地控制機構提供充分的理論依據。
圖8、圖9所示分別為獵豹高速奔跑時前肢、后肢的伸肌肌群和屈肌肌群的變化曲線圖(其中橫坐標為0.3 s內所標定的30組數據的標定順序)。
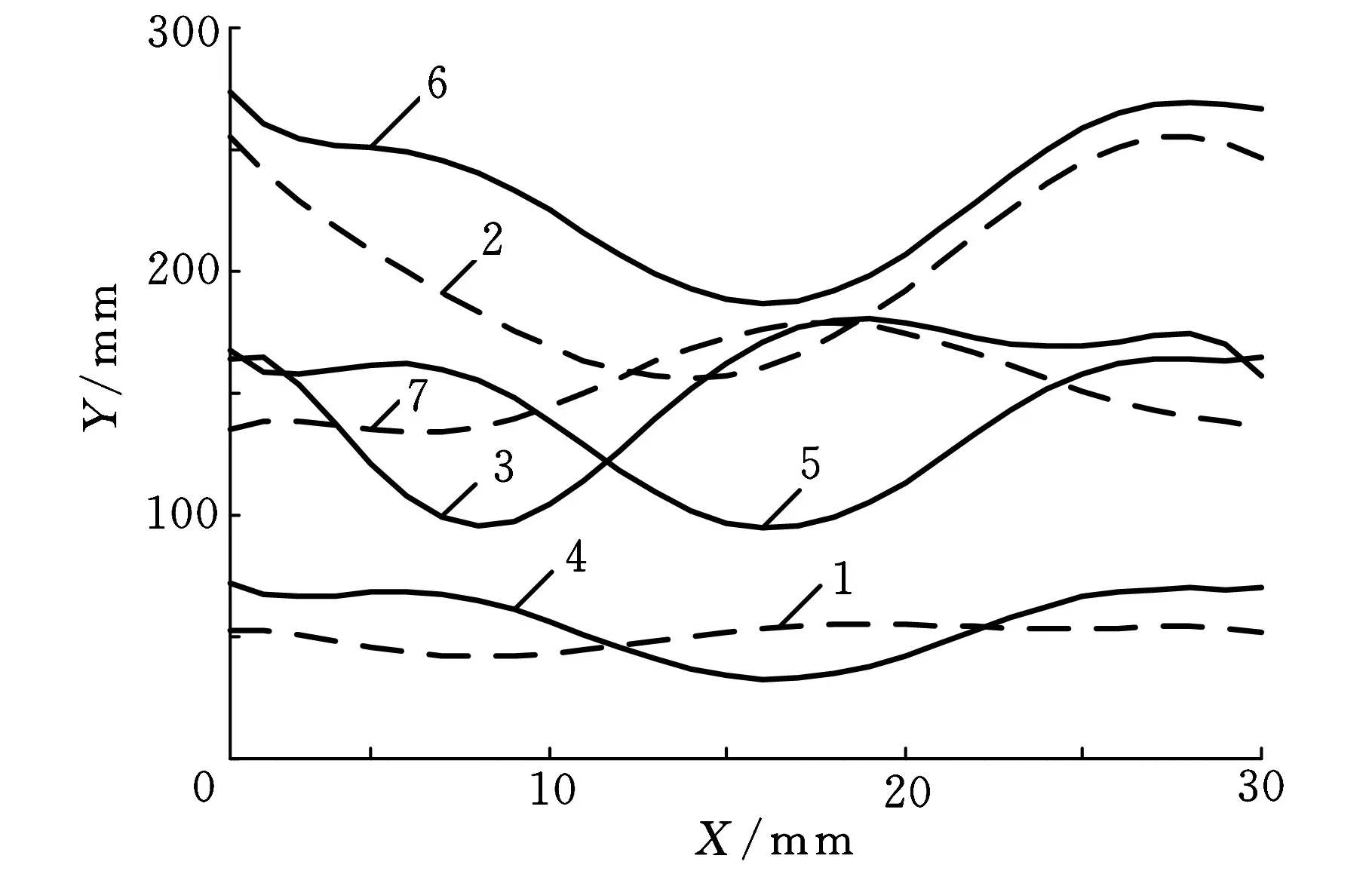
1.TMJ 2.TMJ 3.IS 4.DA 5.DS 6.Tlong 7.Tlat(a)前肢伸肌肌群長度變化

1.SS 2.BB 3.BCH 4.ECR 5.EDC 6.UL 7.FCY 8.FR(b)前肢屈肌肌群長度變化圖8 前肢肌肉力線長度變化
由圖8a可知,肱三頭肌、大圓肌、三角肌等主要肌肉在前肢離地收腿過程中變化較大,為前肢的向前擺動提供了足夠的肌肉力。圖8b中,岡上肌的變形較大,由此可知其在運動過程中可為前肢的收縮運動提供了較強動力。

1.BF 2.BF 3.BF 4.SmiT 5.SmiM 6.Gast(a)后肢伸肌肌群長度變化
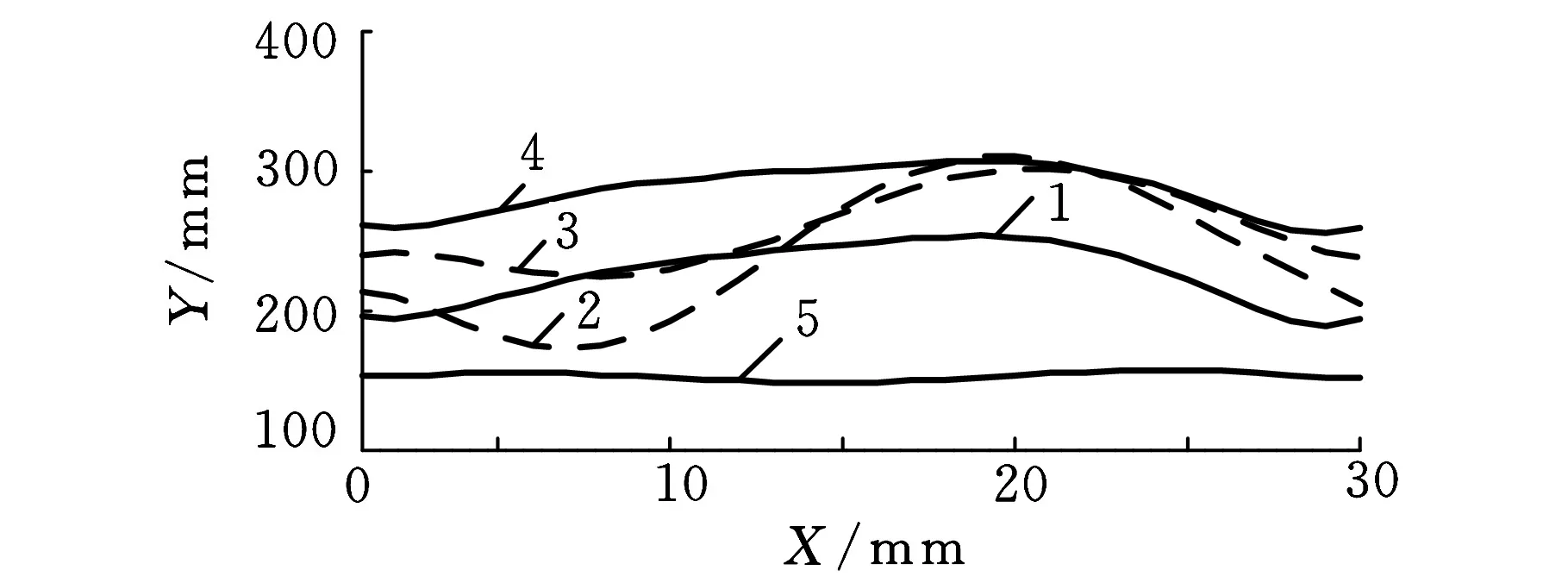
1.RF 2.TFL 3.Tcran 4.Plong 5.VL(b)后肢屈肌肌群長度變化圖9 后肢肌肉力線長度變化
由圖9可知,股直肌、闊筋膜張肌、脛骨前肌、腓骨長肌等屈肌在第20幀時達到峰值,此時肌肉開始準備回收動作,同樣在圖9b內,當后肢向前擺動達到極限位置后,股二頭肌等主要伸肌將開始回收向后擺動。
4 運動仿真及關節力矩計算
利用前述所測數據動對圖7所示骨肌系統模型進行運動仿真實驗,可得圖10所示的運動仿真圖。

圖10 骨肌坐標系統運動學仿真過程
由圖10可知,在運動過程中,獵豹各關節均按不同的規律做周期運動,所受力的變化也呈周期性變化,利用上文所求各肌肉力線長度的變化,可結合下式對關節力矩進行求解:
(4)
其中,Fm為單根肌肉力線所代表肌肉力大小;Fa、Fp分別為屈肌和伸肌肌肉力;l0為肌肉力線自然狀態下的長度;l為肌肉;V為肌肉的伸縮速度;f1、f2、f3由肌肉力線長度、肌肉伸縮速度等參數計算得出。
將式(4)計算得到的肌肉力乘以各自肌肉力線對關節力臂的大小,可得到每條肌肉力線所對應的關節力矩值,最后將所有肌肉力線對關節的肌肉力矩相加,可得圖11所示計算結果。
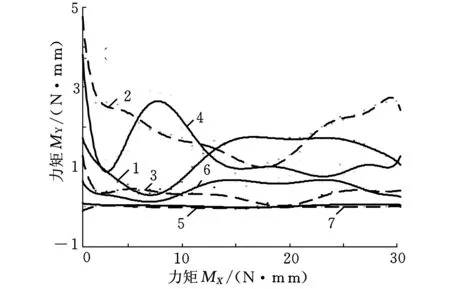
1.Hi 2.Kn 3.Ta 4.Sc 5.Sh 6.El 7.Wr圖11 各關節所受肌肉力矩
圖11所示為前肢與后肢各關節在運動過程中所受到的關節力矩的變化情況。由圖11可知,前肢與后肢的運動相對應,且各關節的運動相互關聯,其中前肢的Sc關節與后肢的Hi關節在第5~10組間相對變化較為明顯,此時,前肢剛剛觸地,Hi關節將支撐整個身體,在慣性力的帶動下向前運動,同時,后肢剛剛完成觸地動作,Sc關節則負責將后腿快速從后擺到身體前向,如圖11所示。從圖中可以發現,Hi和Sc關節力相對于其他關節變化幅值明顯偏高,說明兩根部關節為獵豹奔跑時的主要施力關節,具有重要的作用,其肌肉分布也較為密集。在圖11所示的仿真結果中發現另一些關節力變化并不明顯,而是保持著一個較為穩定的值,因此,在機構設計過程中可進行適當簡化,以相應的結構代替此處關節,對仿生機構整體性能的發揮影響較小。
5 結語
本文基于已有的實驗數據及參考資料對獵豹在奔跑過程中的機構運動學模型進行構建;依據所測算的各關節運動規律,對獵豹的前、后肢進行運動仿真,對其單腿的運動軌跡進行描述;并基于獵豹肌肉的生理參數,對其骨肌系統進行運動學建模仿真,并獲得伸肌與屈肌的運動特性曲線;基于此運動特性,利用肌肉力計算模型,對骨肌系統的肌肉力及關節力進行計算,對前后肢及其附連肌肉系統進行了運動特性分析,對獵豹高速奔跑的運動特性進行了充分的分析。本文基于已有解剖學數據對哺乳動物的高速運動特性從仿生學角度進行了分析,為高速奔跑機構的仿生機理的實現提供了切實的數據支持,為后續研究獵豹等四足哺乳動物的運動特點提供了較好的理論和方法借鑒,并為后續四足及多足機器人高速仿生運動功能的實現提供了較好的方法借鑒。
[1]Hyun D J,Seok S,Lee J,et al.High Speed Trot-running:Implementation of a Hierarchical Controller Using Proprioceptive Impedance Control on the
MIT Cheetah[J].The International Journal of Robotics Research,2014,33(11):1417-1445.
[2]Wang Xin,Li Mantian,Wang Pengfei,et al.Bio-Inspired Controller for a Robot Cheetah with a Neural Mechanism Controlling Leg Muscles[J].Journal of Bionic Engineering,2012(9):282-293.
[3]Deng Qi,Wang Shigang,Xu Wei,et al.Quasi Passive Bounding of a Quadruped Model with Articulated Spine[J].Mechanism and Machine Theory,2012,52:232-242.
[4]Khoramshahi M,Bidgoly H J,Shafiee S,et al.Piecewise Linear Spine for Speed-energy Efficiency Trade-off in Quadruped Robots[J].Robotics and Autonomous Systems,2013,61:1350-1359.
[5]Gotoa M,Kawai M,Nakata M,et al.Distribution of Muscle Fibers in Skeletal Muscles of the Cheetah(Acinonyx Jubatus)[J].Mammalian Biology,2013,78(2):127-133.
[6]Day L M,Jayn B C.Interspecific Scaling of the Morphology and Posture of the Limbs during the Locomotion of Cats(Felidae)[J].The Journal of Experimental Biology,2007,210:642-654.
[7]Ekeberg O,Pearson K.Computer Simulation of Stepping in the Hind Legs of the Cat:an Examination of Mechanisms Regulating the Stance-to-swing Transition[J].J. Neurophysiol,2005,94:4256-4268.
[8]Penny E.Hudson,Sandra A.Corr,Rachel C.Payne-Davis,et al.Functional Anatomy of the Cheetah(Acinonyx Jubatus) Hindlimb[J].Journal and Anatomy,2011,218:363-374.
[9]Hudson P E,Corr S A,Payne-Davis R C,et al.Functional Anatomy of the Cheetah(Acinonyx Jubatus) Forelimb[J].Journal and Anatomy,2011,218:375-385.
[10]陳禮,齊朝暉.高山滑雪板力學特性分析[J].大連理工大學學報,2006,46(6):781-784.
Chen Li,Qi Zhaohui.Analyses of Mechanical Characteristics for Alpine Ski[J].Journal of Dalian University of Technology,2006,46(6):781-784.
(編輯陳勇)
Kinematic Construction and Analyses for a Running Bionic Mechanism
Song Mengjun1,2Ding Chengjun2Zhang Minglu2
1.Tianjin University of Technology and Education,Tianjin,300222 2.Hebei University of Technology,Tianjin,300130
The construction method for kinematic model and the analyses for kinematic characteristics of musculoskeletal system of cheetah was studied herein.Firstly,based on the anatomical data,the kinematic model of forelimb and hindlimb mechanism were constructed,and the running process was simulated;Secondly,based on the position of each muscle distributed on the cheetah and the constructed kinematic model of each limb,the whole musculoskeletal system of the cheetah could be constructed,and the length of each muscle also could be obtained based on the calculation between two attached points of the muscle lines;Finally,the simulation experiments for the whole model of the constructed musculoskeletal system were done using the recorded joint angles, and the variable torques applied to each joint of forelimbs and hindlimbls were solved by using the muscular force calculation method.High speed motion characteristics of mammals were analyzed from the perspective of bionics based on the available anatomical data.Real data support was provided for the realization of bionic mechanism of high speed running mechanism. The kinematic characteristics of the high speed running of the cheetah were studied.
mechanism;kinematics;cheetah;biomechanics of sports;forward kinematics
2015-01-26
國家自然科學基金資助項目(51406135);天津市重大科技專項(工程)(12ZCDZGX45800);天津市科技支撐計劃資助項目(13ZCZDGX01200);河北省自然科學基金資助項目(F2013202220); 天津市應用基礎與前沿技術研究計劃資助項目(14JCYBJC22000)
TH114DOI:10.3969/j.issn.1004-132X.2015.20.016
宋孟軍,男,1983年生。天津職業技術師范大學汽車與交通學院講師,河北工業大學機械工程學院博士研究生。主要研究方向為機構運動學。丁承君,男,1973年生。河北工業大學機械工程學院教授、博士研究生導師。張明路,男,1964年生。河北工業大學機械工程學院教授、博士研究生導師。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
