基于ABAQUS的煤礦應急無線通信中繼器設計
2015-10-30 07:21:04馬宏偉薛旭升尚萬峰
制造業自動化 2015年10期
馬宏偉,薛旭升,尚萬峰
(西安科技大學 機械工程學院,西安 710054)
0 引言
煤礦井下通信可稱為“井下神經”,是承載井下各類重要數據信息的傳輸通道。井下環境復雜,尤其是在發生一氧化碳或其他氣體爆炸、塌方等災難后,井下地理環境發生未知變化,井下通信系統遭到嚴重破壞,為煤礦救援機器人進入井下實施救援工作帶來嚴重影響。保證通信設備在復雜環境中穩定運行,研發安全、可靠的無線通信設備,是實現將井下救援機器人監控系統采集的環境信息傳輸出來[1,2],以及快速搭建無線通信系統,解決救援指揮中心與救援探測機器人、機器人與機器人等之間實時通信的重要硬件基礎之一。可見,適合復雜環境的通信設備成為井下應急無線通信網絡覆蓋的橋梁,是救援機器人開展危險環境下有效救援工作的重要保證。
針對煤礦救援機器人在井下施救過程中,由于地理環境的變化導致通信系統受到很大局限,使機器人采集的數據受到傳輸威脅,搭建無線通信網絡就是一種很好的解決方法之一[3]。本文對組建通信系統的無線設備結構進行研究,提出適應事故井下復雜地理條件及環境的不倒翁型無線中繼器。借助理論力學分析和有限元方法對該結構在井下環境中的運動進行分析,了解不倒翁型中繼器在井下的適應能力,并提供優化結構的方法,為井下煤礦救援機器人在井下實施救援工作時的無線通信網絡搭建提供可靠通信設備,是快速救援與機器人安全運行的重要保證。
1 應急通信無線中繼器設計
無線通信設備完成多個設備之間的各種數據傳輸,實時接入網絡設備進入通信網絡,擴大網絡覆蓋[4]。災難環境下巷道地形發生未知變化,中繼器擺放條件不理想,嚴重影響到中繼擺放位置姿態,導致建立應急通信網絡的中繼器通信能力不足,影響到救援工作的效率。針對此類問題,本文研究了一種適應井下復雜環境,保證井下通信終端在未知環境中遠距離通信的正常工作,為快速、有效地開展災難井下救援工作提供重要通信網絡支持。如圖1所示,為“不倒翁”型無線中繼器結構示意圖。該“不倒翁”型無線通信中繼器本體結構是由重心調解倉、無線通信模塊放置倉、不倒翁頸部、天線夾持頭及天線五個部分組成。
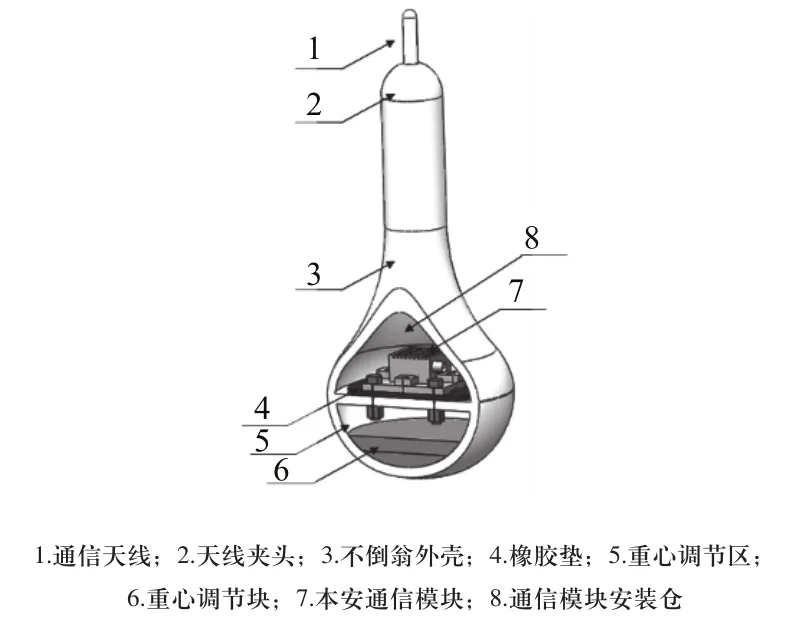
圖1 “不倒翁”型無線通信中繼平臺結構
其各部分主要功能結構為:
1)重心調解倉,由不倒翁球形外殼和重心調解塊組成,完成布放下落出倉過程以及受到外力發生重心偏移后恢復姿態,實現通信天線始終能夠保持最佳姿態。
2)無線通信模塊放置倉,由Wi-Fi通信模塊、供電電池、本安殼、減震片及安裝板組成,完成安全安裝通信模塊,并用上球體過渡頸部上蓋連接不倒翁下球體,將無線通信模塊安裝在放置倉內,并與外部環境盡可能隔離,以保證安全運行。
3)不倒翁頸部,為空心圓柱桿,下連接無線通信模塊放置倉外殼體,上連接天線夾持頭。桿身長度由井下有效通信信號距離地面的高度決定,以保證在距離地面合適高度的情況下,能夠正常通信。同時,將經過頸部的天線延長線,從無線通信模塊處連接至天線夾持頭上處天線。
4)天線夾持頭,為帶孔半球形,下連接不倒翁頸部,并將天線夾持在夾持頭上。
5)天線,由無線通信模塊及井下通信參數要求,設計通信天線的尺寸及類型,保證在煤礦井下的復雜環境中,正常接受與發送通信數據。
2 “不倒翁”型無線通信中繼器力學分析
“不倒翁”型無線通信中繼器需要完成在布放、外力沖擊等過程中,在未知地形環境的情況下,恢復最佳通信工作姿態的任務。因此,需要對不倒翁在井下的受力過程進行分析,為設計不倒翁在井下環境適應性的能力提供重要理論依據。
2.1 不倒翁基本受力情況
不倒翁穩定平衡點CG在整個機構中是變化最為慢的位置。不倒翁順時針或傾斜逆時針擺動時,CG點離開垂直平衡位置,通過新的支撐點,使得CG點垂直距離回復過來。重力返回到其穩定的位置[5]。如圖2所示。
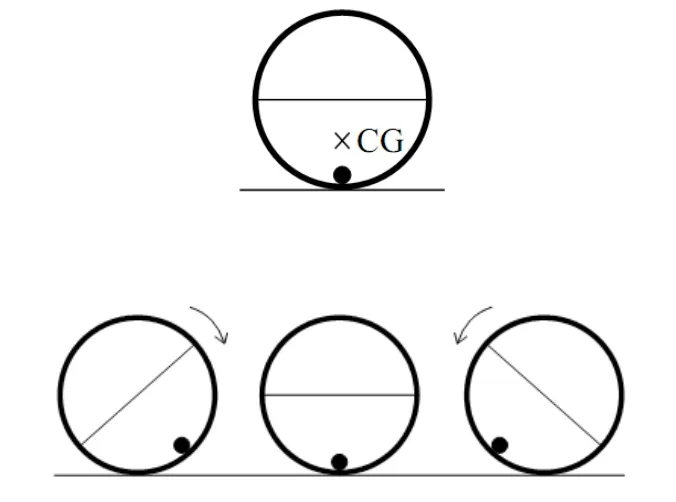
圖2 不倒翁的平衡
根據不倒翁原理,不倒翁的位置姿態分為三種,如下:
1)不倒翁平衡狀態
此狀態下,不倒翁受到兩個力:重力和支持力。
2)不倒翁傾斜狀態
此狀態下,不倒翁傾斜時受到兩個力矩:外力形成干擾力矩和重力形成的抵抗力矩。
3)不倒翁復原狀態
此狀態下,從勢能角度考慮,勢能低的物體比較穩定,物體一定會向著勢能低的狀態變化。
在以上的整個過程中,建立新的平衡是其中主要的問題,因為只有如此才能抵制外力的干擾,而恢復原有的平衡則是次要問題,因為此時外力的干擾已經去除。在整個過程中不倒翁始終保持平衡的屬性,這便是“平衡的穩定性”。
2.2 中繼器在井下傾斜地形中的受力情況
當中繼器被布置在有坡度的地形中時,存在2種運動狀態,包括:不下滑,原地傾斜狀態,以及下滑后傾斜狀態。第一種情況相比在平面時的傾斜狀態,多了接觸面的坡度α。第二種情況中繼向下滑動,則在中繼靜止前無需考慮其姿態變化,直至中繼滑動到靜止位置時,對中繼進行傾斜位置受力分析。如圖3所示,為“不倒翁”型中繼器在坡度地形上的傾斜受力分析。

圖3 “不倒翁”中繼器在坡度地形上的傾斜受力分析圖
當中繼下落靜止或滑動至靜止位置時,傾斜狀態的受力分析為:

2.3 中繼器復原位置受力情況
對于上重下輕的物體來說,重心越低越穩定。而從勢能角度考慮,勢能低的物體比較穩定,物體一定會向著勢能低的狀態變化。然而,從力矩平衡角度來講,“不倒翁”型中繼器傾斜擺動時,重心被抬高,產生力矩,該力矩是用來克服外力所造成的傾斜擺動,使中繼器恢復到平衡狀態[6]。如圖2所示,為“不倒翁”型中繼器在布放過程或受外力情況下恢復姿態位置的受力分析圖。
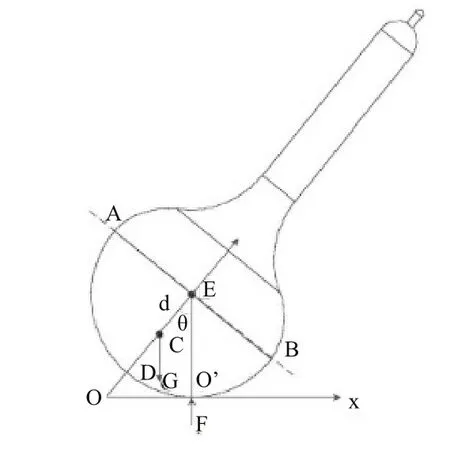
圖4 “不倒翁”型中繼器恢復姿態位置的受力分析圖
圖4中,重心為C點,E被稱為穩心點,當下落或受外力時,出現O轉至O’,產生了力偶距,在重力的存在下,同時產生恢復力矩M,即:

式中,G為重力;d為重心到穩心距離,即穩心高度;θ為重心偏移角度。該式為外力影響下產生的恢復力矩,并在該力矩的作用下,“不倒翁”型中繼器逐漸恢復到平衡位置。
2.4 中繼器在井下地理環境下的受力情況
一般情況下,不倒翁在較平整地形,例如,堅實平地、沙地、煤塊堆積較密集的地形中受力情況正如上述分析。但在煤塊或其他大塊障礙物散落地形,即地面松散,間隙較大的情況下,“不倒翁”型中繼器在大縫隙地面的受力情況會因受到多接觸點的影響,使中繼器恢復姿態的能力受到一定的影響。
這里以兩支點為例,如圖5所示,在大縫隙地面上,“不倒翁”型中繼器出現的幾種情況,從產生力矩的角度簡單分析,對該地形環境中的傾斜情況。

圖5 大縫隙地面上不倒翁受力分析圖
當地面存在碎石等不平整的情況下,由于石縫距離過大,使得“不倒翁”型中繼器在布放或者受沖擊后,落在石縫之間。此時,在打破不倒翁平衡的同時,產生了力偶距,由于出現了兩個支撐點O和O’,且O、O’點在重心C點兩側時,不倒翁在傾斜情況下,由重力G產生的恢復力矩M為:
但是,重力在產生恢復力矩,使不倒翁具有恢復狀態的同時,由于O點支撐造成外力干擾力矩M2為:
其中,sinrl2?=θ,r為重心到下半球底的距離。
此時,若θ<90°時,恢復力矩M>M2,并且由于不倒翁下部為半球形表面,在重力作用下沿切線滑動,逐漸進入平衡位置。
若θ>90°時,將被卡死,不會進行恢復狀態的運動。
當不倒翁所在地面石縫間隙的兩個支點都出現在重心C點的右側時,理想情況下,可將兩點簡化為一點支撐的情況,此時的受力與“不倒翁”型中繼器在地面較好的環境中的受力情況類似。
3 有限元模型的建立及結果分析
“不倒翁”型中繼器在井下環境完成搭建通信網絡過程中的受力情況,需要先借助有限元仿真軟件ABAQUS多體系統建立進行“不倒翁”型中繼的幾何模型,并在建立材料模型時,初步確定在井下災難環境中適應各種突變和危險環境的材料,分析“不倒翁”型中繼器在不同地形、布放下落、受到外力沖擊等環境下的動力學情況,為保證后期設計實體中繼器時提供可靠設計依據,以及驗證方法。適應井下災難環境,需要以耐高溫、耐火、隔潮防水、耐沖擊等方面為前提,選擇較輕的耐火性、耐沖擊較高的聚碳酸酯(工程塑料),便于減小不倒翁頭部、頸部重量。同時,選擇鉛塊為不倒翁調整重心的重力塊。聚碳酸酯和鉛塊的材料屬性[7],如表1所示。

表1 材料屬性及單元類型
不倒翁在地面上運動過程中,可以假設不倒翁與地面的接觸為多體接觸類型,對多體系統的仿真環境進行設置,為觀察“不倒翁”型無線通信中繼器與煤礦井下地面的瞬態接觸,設置連接單元、連接單元關系及連接單元屬性,并在接觸設置中,設置接觸方式及接觸屬性,完成多體連接關系設置,并劃分不倒翁與地面的有限元網格[8~10]。本研究旨在設計“不倒翁”型中繼器原型,應用
ABAQUS有限元軟件對其進行動力學研究,提出正確仿真計算方法,為研制“不倒翁”型中繼器實體提供可靠且重要依據。本文將在加載1000N、2000N、3000N三種集中力的情況下,對“不倒翁”型中繼器在煤礦井下布放或者外力沖擊下運動恢復平衡過程的仿真。
3.1 速度仿真分析
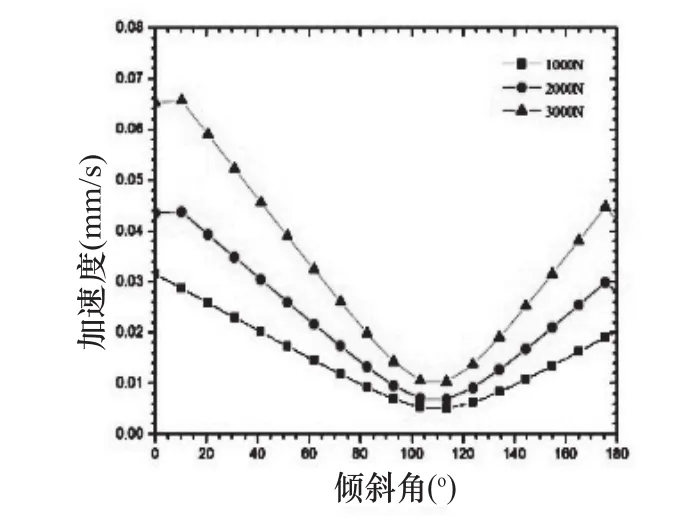
圖6 半周期往復過程中相對速度矢量及變化曲線圖
圖6為在三種載荷力下,速度在相對位移方向上的速度變化,曲線最低點左端為不倒翁從最右端恢復姿態過程,當到達最低點時恢復姿態,又在其慣性力作用下向左端擺動,由于摩擦力及恢復力的存在,速度無法達到最右端的大小,依次在恢復過程中,速度不斷減小,最終達到平衡狀態。
3.2 加速度仿真分析
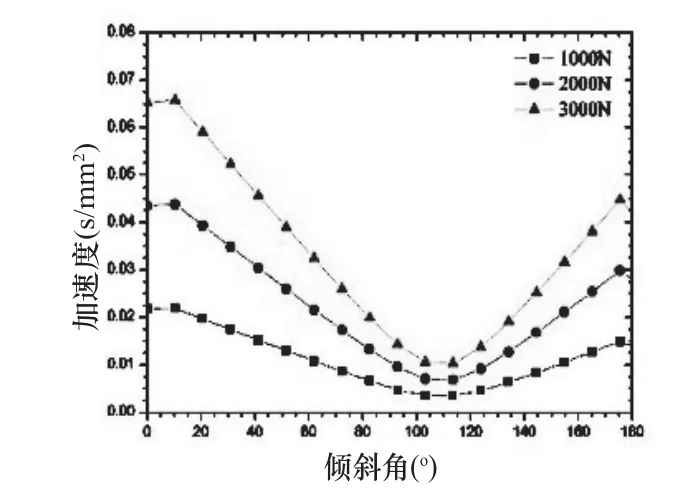
圖7 半周期往復過程中相對速度矢量及變化曲線圖
圖7為在三種載荷力下,加速度在相對位移方向上的加速度變化,曲線最低點左端為不倒翁從最右端恢復姿態過程,當到達最低點時恢復姿態,又在其慣性力作用下向左端擺動,由于摩擦力及恢復力的存在,加速度無法達到最右端時的大小,逐漸在恢復過程中,加速度不斷減小,最終達到平衡狀態。同時,加速度反映速度隨時間的變化關系,當加速度由于外界力的變化使得速度隨時間越來越小,最終恢復到平衡狀態。
三種不同外界載荷的沖擊下,傾斜在同一角度時的速度不同,外力越大,速度越大;當通過最小速度,進入恢復姿態運動時,速度衰減最快是外界載荷最大的,但是最先停止的可以預測為受外界載荷最小的。可見,外界載荷是影響不倒翁恢復的重要因素之一。
4 結論
通過研究事故井下復雜環境中的潛在危險,為降低井下通信設備安全威脅,研發可靠的無線通信設備,是實現快速搭建煤礦救援探測機器人無線通信系統,解決救援指揮中心與救援探測機器人、機器人與機器人等之間實時通信的重要硬件基礎之一。本文通過對“不倒翁”應用特點及事故井下中繼器適應性的分析,設計出“不倒翁”型中繼器的具體結構、裝配關系及在井下的工作關系;通過對“不倒翁”型無線中繼器在三種狀態及不同環境下受力情況的動力學分析,從理論角度上得出“不倒翁”型無線中繼器在事故井下的可行性、安全性和可靠性等特點;應用有限元仿真軟件ABAQUS建立“不倒翁”型無線中繼器的有限元幾何模型、材料模型、力學模型等,得出“不倒翁”型無線中繼器的運動學分析結果,為研制實體提供重要計算手段和驗證方法。
[1] 馬宏偉,王川偉.煤礦救援探測機器人轉向及避障機理研究[J].制造業自動化.2014(04).
[2] MS. Chakkath, S. Hariharansiddharath, B. Hemalatha. Mobile Robot in Coal Mine Disaster Surveillance [J]. IOSR Journal of Engineering,2012,Vol.2(10):77-82.
[3] S. TejaRam,Smt. M. Nalinisri.Mobile Robot in Coal Mine Disaster[J].International Journal of Computer Trends and Technology (IJCTT),2013,Vol.4(5):1106-1110.
[4] Hideaki O., Hagi (JP); Hideaki T., Kawasakii (JP).Communication Device Simultaneously Using Plurality of Routes Corresponding to Application Characteristics[P].US 2006/0039335 A1,2006.
[5] Andre K.T.. Archimedes, the Center of Gravity, and the First Law of Mechanics (2nd edition)[M].Library and Archives Canada Cataloguing, 2010,:112-113
[6] 曹春梅,張曉宏.不倒翁的力學分析[J].物理與工程,2002,12(1):10-11.
[7] 王忠保,等.機械工程材料性能數據手冊[M].北京:機械工程出版社,1995.
[8] 趙騰倫.ABAQUS6.6在機械工程中的應用[M].北京:水利水電出版社,2007.
[9] 莊茁. 基于ABAQUS的有限元分析和應用[M].北京:清華大學出版社,1998.
[10] 王玉鐲.ABAQUS結構工程分析及實例詳解[M].北京:中國建筑工業出版社,2010.
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
電子制作(2018年18期)2018-11-14 01:48:24
中國生殖健康(2018年6期)2018-11-06 07:09:28
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
