基于Sigmoid函數的PMSM模糊滑模觀測器設計
2015-10-30 07:21:06牛綠原
制造業自動化 2015年10期
牛綠原,余 劍,王 剛,李 宇
(南京理工大學 泰州科技學院,泰州 225300)
0 引言
永磁同步電動機具有體積小、效率高、調速性能優異等優點,被廣泛應用于工業控制領域。從控制的角度來看,分為有傳感器和無傳感器兩種,前者會帶來成本上的增加以及運行不穩定性的增大,后者往往根據測得的電壓和電流信息,結合永磁同步電動機的數學模型,通過理論估算的方法計算出轉速和轉角,可靠性和抗干擾性強,具有更為廣闊的應用前景。目前,關于永磁同步電動機的無傳感器技術已經成為一個研究熱點。
近年來,國內外學者對此做了大量的研究。提出了許多方法,主要有:高頻信號注入法、模型參考自適應法、擴展卡爾曼濾波法、滑模觀測器法等等[1,2]。其中,滑模觀測器法強調控制系統的結構隨著開關特性而變化,不受系統參數和擾動影響,故而具有較強的魯棒性,近年來被廣泛應用于永磁同步電機的無速度傳感器控制中。而傳統的滑模趨近律采用開關函數,往往會出現劇烈的抖振[3]。為了減小抖振,文獻[4,5]將Sigmoid函數引入到滑模觀測器中,并構建了自適應速度控制器;文獻[6]將Sigmoid函數和定子電阻辨識相結合,并通過實驗進行了證明;文獻[7]將模糊控制引入到滑模觀測器中,通過仿真和實驗驗證了抑制抖動的有效性;文獻[8]將反電勢估測值引入到觀測器中;文獻[9]設計了二階滑模觀測器;文獻[10]利用兩模型輸出的偏差構造了2個滑模面,設計了雙滑模觀測器。
本文以Sigmoid函數代替傳統的開關函數,并以模糊控制來實現K值的自適應更新,同時,考慮到永磁同步電機是一個復雜的非線性系統,為了使系統同時具有調節速度快和穩態精度高的優點,在速度環引入模糊控制器,使其和傳統的PI調節器相結合。通過仿真,驗證了新設計的觀測器的正確性。
1 永磁同步電動機數學模型
PMSM在?、β坐標系下的數學模型為:電壓方程:
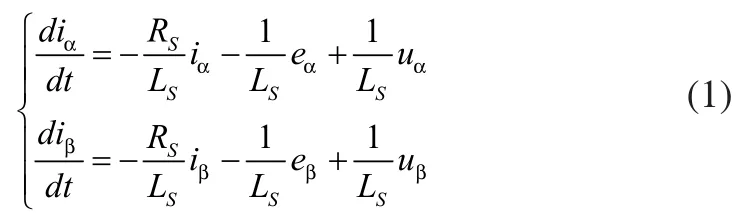
電動勢方程:
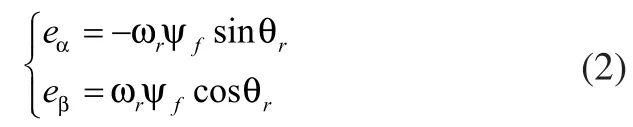
轉矩方程:

2 模糊滑模觀測器設計
2.1 基于Sigmoid函數觀測器設計
以Sigmoid函數代替傳統的切換函數,不僅可以減小抖振帶來的影響,而且可以省略低通濾波器和相角補償。為此,構造電流型滑模控制方程為:
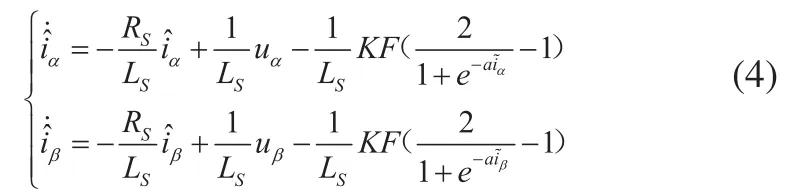
則可得滑模觀測器的估計值為:

2.2 穩定性分析
式(4)和式(1)相減,得系統誤差狀態方程:
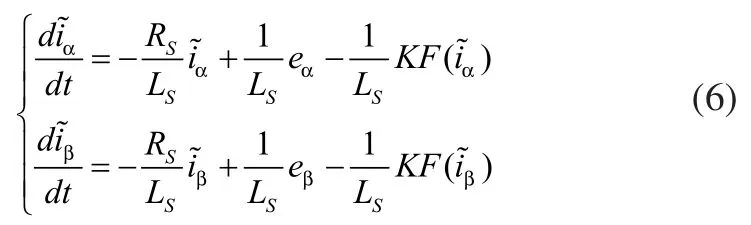

根據穩定性條件,必須有:
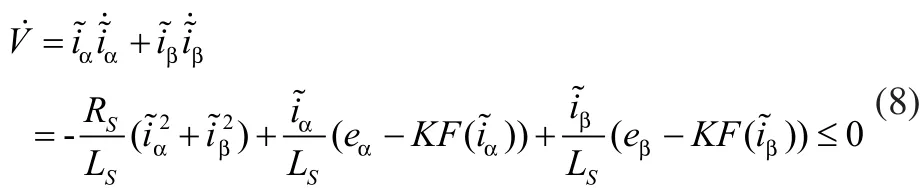
則可得到觀測器穩定的條件為:

顯然,只要滑模增益K大于電動勢的最大值即可保證觀測器的穩定性。
2.3 自適應模糊滑模增益的設計
由式(9)可以看出,滑模增益K必須足夠大才能滿足穩定性條件,傳統的滑模控制中K的數值往往是根據經驗選定的常數,但實際系統中電流的觀測誤差是時變的,固定的常數有可能增大抖振噪聲,使估計誤差增大,為了降低抖振,K值應該在滿足穩定性條件的前提下根據誤差的變化而變化。為此,本文將模糊控制引入到滑模觀測器中,以調節K的大小。構建自適應模糊滑模觀測器的原理圖如圖1所示。
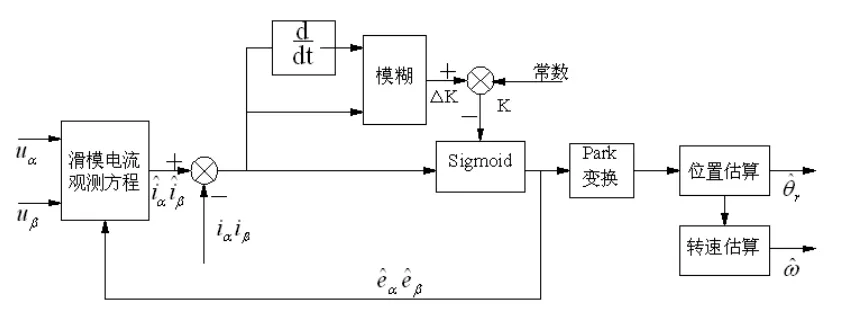
圖1 自適應模糊滑模觀測器原理圖
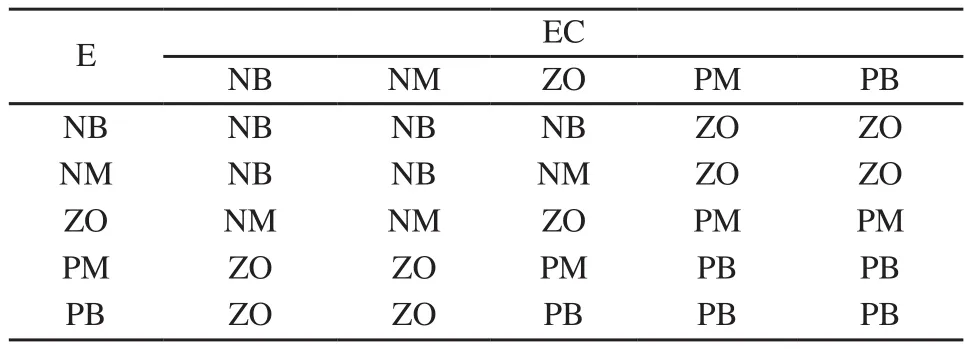
表1 輸出變量KΔ的模糊規則表
選取隸屬函數均為三角形,如圖2所示。
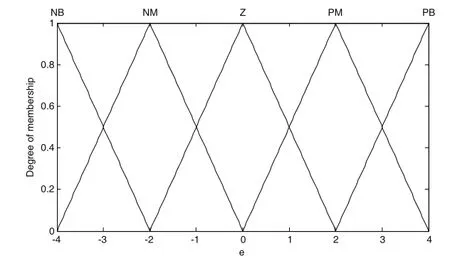
圖2 隸屬函數
3 仿真分析
為驗證所提出控制策略的可行性和有效性,選用一臺永磁同步電機,電機參數為:額定功率4kW,磁極對數4,相電阻Rs=2.875Ω,轉子磁鏈ψf=0.17Wb,交直軸電感Ld=Lq=8.5mH,搭建了基于Matlab/Simulink軟件的仿真模型。速度給定為600rad/s,負載轉矩為0.5N.m,仿真參數設為固定步長,取0.0002s,算法為ode3,仿真時間設為0.2s,圖3為系統基于SVPWM的矢量控制原理圖。圖4、圖5、圖6分別是基于Sigmoid函數的模糊自適應滑模觀測器下的角速度實際值和估計值波形、位置實際值和估計值波形和位置誤差波形。
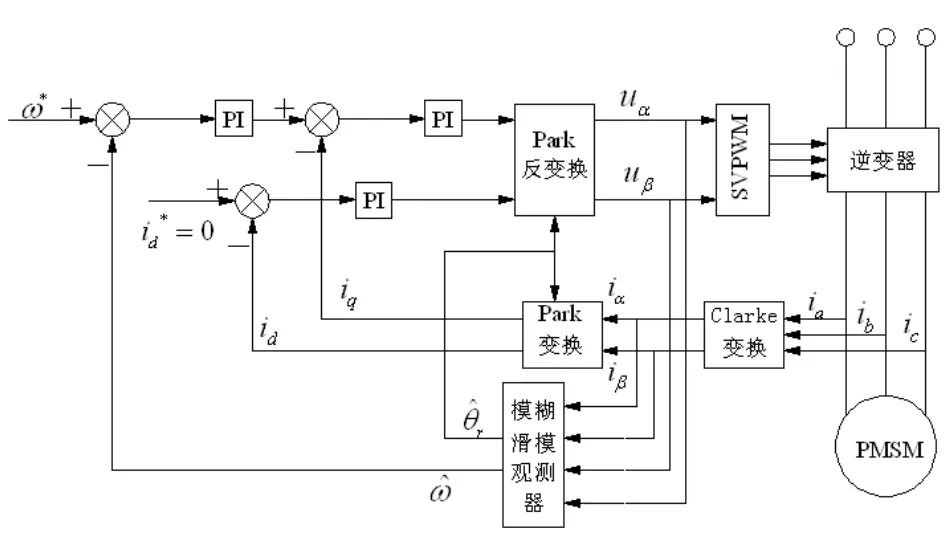
圖3 控制系統原理圖
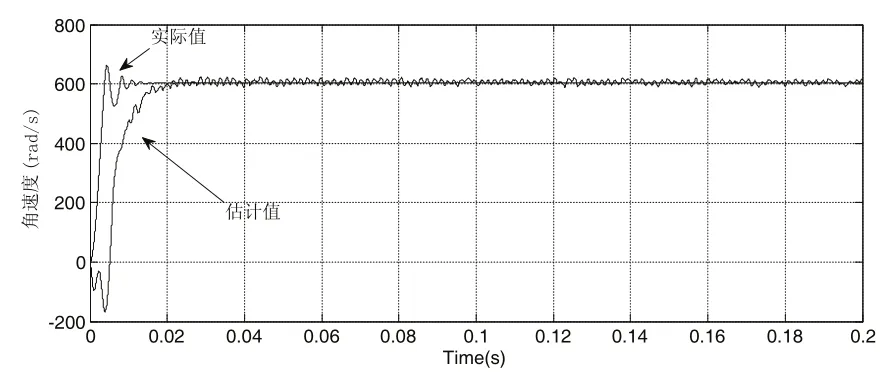
圖4 轉子速度實際值和估計值
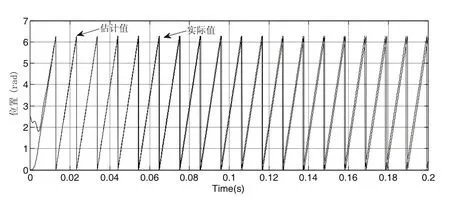
圖5 轉子位置實際值和估計值
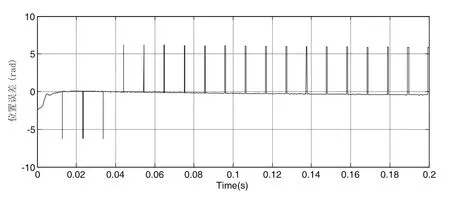
圖6 轉子位置誤差
由圖4可以看出,在速度上升階段,估計速度低于實際速度,0.02s即可達到給定值,之后能夠較好地跟蹤跟隨實際速度,由圖5和圖6可以看出,角速度估計值能夠很快地(約200°電角度)接近實際值,之后便和實際值保持基本吻合,誤差小,且抖振現象很小.仿真結果表明:所設計的基于Sigmoid函數的模糊自適應滑模觀測器是正確的。
[1] 舒志兵,翟正磊,章杰,張涌松.基于滑模觀測器的PMSM無傳感器控制[J].電氣傳動,2012,42(11):7-10.
[2] 黃旭超,林榮文,林瑩瑩.永磁同步電動機無位置傳感器矢量控制仿真[J].微特電機,2013,41(12):68-70.
[3] 劉昇,盧廣山,徐瑜,劉闖.基于改進型滑模觀測器的PMSM無位置控制[J].南京航空航天大學學報,2013,45(4):474-478.
[4] Paponpen K,Konghirun M. An Improved Sliding Mode Observer for Speed Sensorless Vector Control Drive of PMSM[A]Power Electronics and Motion Control Conference,IPEMC 2006.CES[C],IEEE 5th International,2006:1-5.
[5] Kung Ying Shieh,Nguyen Vu Quynh,Huang Chung Chun,etal.Design and Simulation of Adaptive Speed Control for SMO based Sensorless PMSM Drive[A]IEEE Conference Publications Proceedings of the 4th International Conference on Intelligent and Advanced Systems[C],ICIAS,2012:439-444.
[6] Hongryel Kim,JubumSon,Jangmyung Lee.A High speed Sliding mode Observer for the Sensorless Speed Control of a PMSM[J].IEEE Transaction on industrial electronics,2011,58(9):4069-4077.
[7] 張洪帥,王平,韓邦成,程金緒.基于模糊滑模觀測器的磁懸浮高速永磁同步電機轉子位置檢測方法[J].電工技術學報,2014,29(7):147-153.
[8] 邱忠才,郭冀嶺,肖建.基于Sigmoid函數的PMSM滑模變結構位置速度觀測器[J].電氣傳動,2014,44(3):3-7.
[9] 張曉光,孫力,陳小龍,安群濤.基于二階滑模觀測器的永磁同步電機無位置傳感器控制[J].電力自動化設備,2013,33(8):36-41.
[10] 王慶龍,張興,張崇巍.永磁同步電機矢量控制雙滑模模型參考自適應系統轉速辨識[J].南京航空航天大學學報,2014,34(6):897-902.
