基于多特征融合相關的弱小目標檢測技術應用
2015-11-24 00:45:12宋蘇杭
大眾科技 2015年5期
宋蘇杭 高 節
(中國兵器裝備集團成都火控技術中心,四川 成都 611731)
基于多特征融合相關的弱小目標檢測技術應用
宋蘇杭 高 節
(中國兵器裝備集團成都火控技術中心,四川 成都 611731)
弱小目標的檢測與跟蹤是當前雷達信號處理研究的熱點。文章介紹了一種新的弱小目標檢測跟蹤技術,該技術基于生物視覺感知機理,將圖像處理方法融入雷達信號處理,分析目標特征和雜波、噪聲等背景特性,在此基礎上探討有效的背景抑制方法,并結合多特征信息融合方法實現在復雜背景下對弱小目標的檢測與跟蹤。
弱小目標檢測;視覺感知;多特征融合
1 引言
未來空襲與防空的對抗依然是體系與體系之間的對抗。隨著科學技術的進步和大規模殺傷武器的擴散,戰術彈道導彈(TBM)、巡航導彈(CM)、無人機等已成為空襲體系中必不可少的組成部分,加上攻擊時采用低空或超低空突防、掠地(海)飛行的技戰術,飛行高度僅10~100米,導致探測系統接收的目標回波雜波強、信噪比低、多徑效應明顯,目標往往湮沒在雜波和噪聲中。而伴隨著隱身技術的日趨成熟,飛機、導彈等目標的RCS減小了一到兩個數量級,極大地影響了雷達威力。總而言之,對現代雷達的要求仍然是“四抗”,即抗干擾、抗偵察、抗摧毀、抗隱身和低空突防。
為了對付這些威脅,整個防空反導系統的探測器應包括能在嚴重的雜波中探測出小目標的監視及跟蹤雷達,可以邊跟蹤邊掃描,作為后續跟蹤及打擊裝置的基礎。因此,對微弱目標的檢測與跟蹤成為在防空反導體系中雷達急需解決的技術問題。
在弱小目標檢測方面,目前主要的研究方向是采用多信息融合以及TBD等技術。其中,采用多傳感器信息融合的探測方法,系統復雜,造價昂貴,在實際應用上受到限制;而TBD技術在雷達系統中,主要有動態規劃算法[1],以及正在嘗試的粒子濾波和時頻分析方法等,但由于需要考慮時間和空間信息的相關性,它們的計算量和存儲量都偏大,處理也相對復雜。本文提出了一種新型的弱小目標檢測與跟蹤的技術方法,該方法基于生物視覺感知機理,對單個傳感器獲取的目標信息,結合信號處理與圖像處理技術,采用多特征分析及融合的多種處理算法,完成多特征提取、自學習以及融合相關處理等,可以克服常規采用單一特征處理可能帶來的弱信號提取性能與提取可靠性之間的矛盾,能夠在防空反導系統中從強雜波背景干擾中探測出目標。
2 生物視覺感知與信息融合
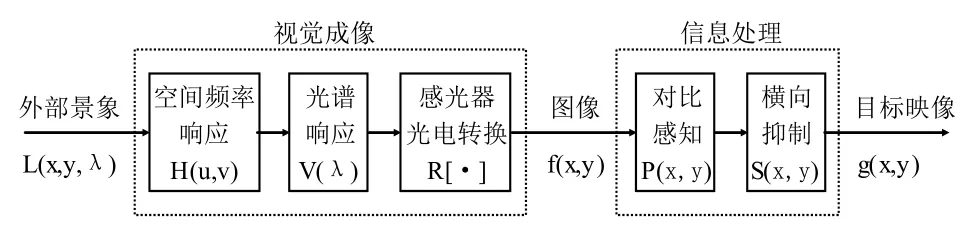
圖1 視覺感知模型框圖
視覺可以看作是一個完善的信息處理系統。對于計算機視覺而言,值得研究的是圖1中的第2部分,即信息處理過程的技術實現問題。人類視覺的顯著特征之一就是對比感知,其核心首先是強調了整體背景的支撐襯托作用,其次才突出并體現了圖形(目標)的視覺反差,使目標與背景相分離。分離的過程實際上就是目標提取的操作過程[2]。
根據以上探討的相關理論,在此提出一種基于生物視覺原理的多特征融合智能相關技術,根據目標特征(尺度、外形、運動等特性)具有一致性和關聯性,而噪聲則是隨機漲落的特點,遵循視覺感知對運動目標的認知過程,設計若干相互獨立的處理通道,對多特征進行融合,從而建立檢測、識別與跟蹤策略。算法主要內容包括:背景預測、特征提取與信息融合以及目標信號的檢測與跟蹤。
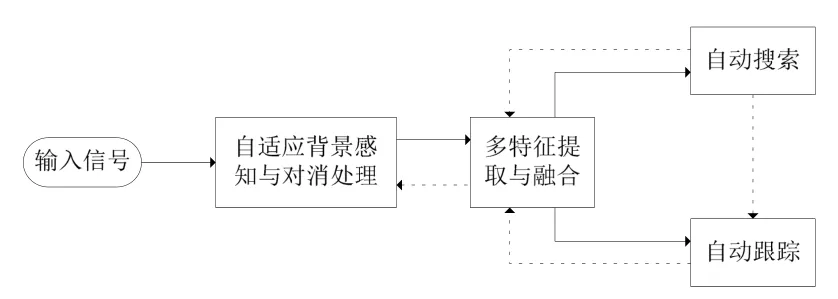
圖2 基于生物視覺原理的目標檢測跟蹤
2.1 背景預測
采用時間遞歸算法,根據目標、雜波模板中存儲的特征信息和上一次的目標信號處理結果進行背景學習,可預測雜波背景、確定雜波特征。接收到下一周期的回波數據后,在特征域中進行雜波抑制。
采用基于卡爾曼濾波理論的時間遞歸方法來預測背景。這種方法是基于這樣的事實:背景在幀間的變化較目標在幀間的變化要緩慢一些,可以采取學習的方法來預測背景。背景遞歸預測公式為

其中 i, j代表一個像素的坐標,k是時間坐標及幀號,Ib(i, j, k)表示k幀時的背景特征,I( i, j, k)表示k幀時的圖像特征, g( i, j, k)是增益因子。 g( i, j, k)表達式為

λ和μ是介于0和1之間的常量,決定了背景預測的自適應特征, M( i, j, k)是二值化輪廓。λ必須足夠小,以便運動點目標能夠從背景序列中有效地分離出來;μ必須大于λ,表征背景變化快慢。
由于預測背景中不包括目標,目標可以通過輸入圖像序列與預測背景比較檢測出來。

其中I( i, j, k + 1)表示 k+ 1幀時的圖像特征。
選擇一個恰當的閾值將產生一個二值化的目標輪廓。閾值T可以通過恒虛警率計算出。若 D( r , k + 1)≥ T,則M( r, k+ 1)=1;否則 M( r , k+ 1)= 0。
2.2 特征提取與信息融合
目標檢測跟蹤的前提與關鍵是目標特征提取。在雷達回波信號中,除強度和頻率特征外,其它還有空間特征、時頻特征等,充分利用目標的物理、數學等多方面特征信息,可有效提高系統對目標和干擾的分辨能力。
在特征融合中,采用“平行多級同步整合”機制,選定目標的若干穩健特征,按系統中的特征穩定性差異來確定各特征的置信度,并根據能量函數最小準則計算各特征歸一化加權系數,然后進行特征融合,形成能反映目標屬性的組合特征,再根據相應的決策準則進行目標判識。在實際實現中針對不同特征采用不同的處理方式。由訓練樣本觀察均值和標準差差異較小且可以直接提取向量的特征,通過對稱及并行組合后由K-L變換至一個新的組合特征域進行處理。取兩個特征的融合為例進行說明。設A、B為樣本空間Ω上的兩組特征,任意樣本ξ∈Ω,其對應的兩個特征向量分別為 α∈ A和 β∈ B,用復向量 γ = α+ iβ 來表示ξ的并行組合特征,此時若兩組特征α與β的維數不等,低維的特征向量用0補足。例如,則組合特征為。

其中 ,X YC∈ ,H為共軛轉置符號。
定義了以上內積的復空間稱為酉空間。酉空間內的類間散布矩陣、類內散布矩陣和總體散布矩陣分別定義為:
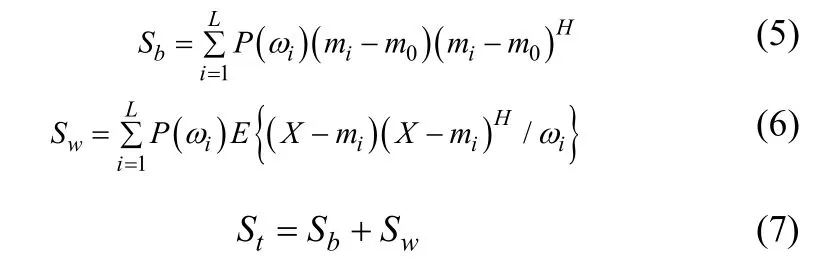
其中 P(ωi) 為第i類訓練樣本的先驗概率,為第i類訓練樣本的均值,為全體訓練樣本的均值。由上式的定義可知,wS、bS、tS均為 Hermite矩陣,且非負定。當wS可逆時,wS、tS均為正定矩陣。
下面以總體散布矩陣 St為例來介紹酉空間內的K-L變換方法,可設 St的特征向量為,且彼此正交,所對應的特征值為,滿足。選擇前d個最大特征值所對應的特征向量作為投影軸,由于酉空間內 St的特征值均為非負實數,組合特征向量在軸 ξj上投影后的總體散布量為 λj。在酉空間內,以 St為產生矩陣的K-L變換為:

此外,具有相對意義的特征一般用于定性分析,通過樣本難以提取特征向量,針對該類特征,在決策階段則通過D-S證據理論進行特征權重的取舍,從而達到多特征融合的目的。
2.3 目標信號的檢測和跟蹤
目標特征信息通過K-L變換和D-S證據理論融合后,即進入目標信號的檢測和跟蹤。該模塊通過訓練樣本的學習,建立目標和雜波的初始模板,采用模板進行信息匹配。目標模板包含了整個信號處理過程到當前時刻所提取的所有目標信息及其各階融合特征,并根據當前時刻的檢測和跟蹤狀況對模板進行實時修正。雜波模板包含最近時刻(一般3~5幀)所判讀為雜波的信號信息,并根據當前數據中的雜波狀態進行實時修正。觀測域匹配于目標模板的判斷為目標,匹配于雜波模板的判斷為雜波,否則為噪聲。模板匹配采用卷積的方式進行,可以通過FIR濾波器實現。
3 弱小目標信號處理的硬件設計
弱小目標信號處理硬件系統由兩塊信號處理板組成,主板負責處理和通道信號,并完成與雷達系統的通信與數據傳輸,從板負責處理方位差、俯仰差通道信號。每塊信號處理板都采用FPGA+DSP的架構模式,采用FPGA完成采樣控制及中頻信號的預處理,采用DSP完成后續部分的弱小目標信號處理算法,同時設計較大的數據吞吐通道,降低對后端的速率要求。具體框圖如圖3所示。
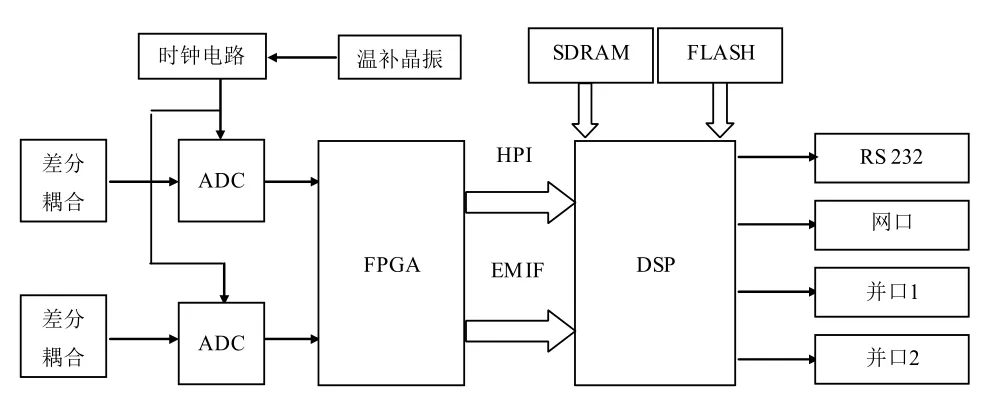
圖3 弱小目標信號處理板框圖
4 驗證
4.1 仿真驗證
依據基于多特征融合相關弱小目標信號處理算法的基本原理,開展基于Matlab的仿真驗證研究。利用信號源輻射信號模擬不同強度的目標回波,將信號源功率設置為低于原系統靈敏度-6dB,分別采用原常規信號處理算法以及基于多特征融合相關的弱小目標信號處理算法對輸入信號進行仿真處理。仿真結果見圖4,可以看出,基于多特征融合相關弱小目標信號處理算法的檢測能力明顯優于常規信號處理算法。
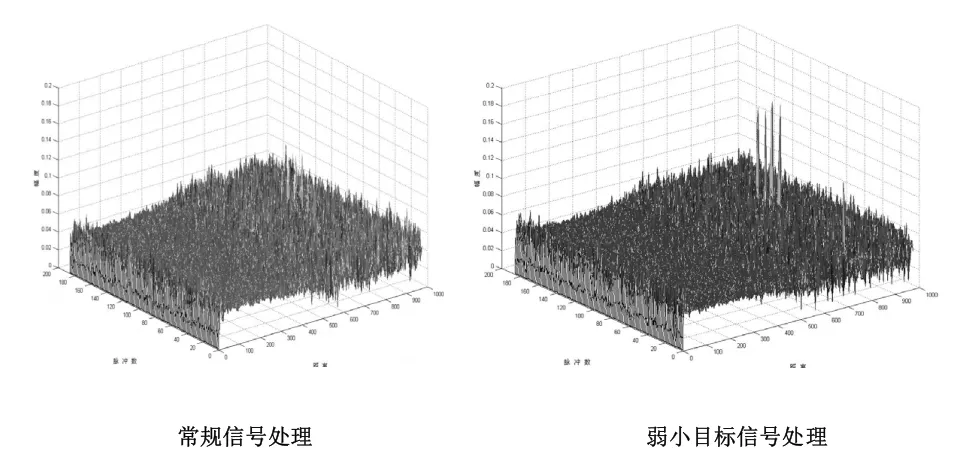
圖4 仿真驗證結果
4.2 試驗驗證
實際驗證以某雷達作為硬件平臺,通過外掛弱小目標信號處理組合實現某雷達常規信號處理系統與弱小目標信號處理系統分時切換工作,驗證弱小目標信號處理算法對系統檢測跟蹤能力的改善。驗證試驗系統構成框圖見圖5。
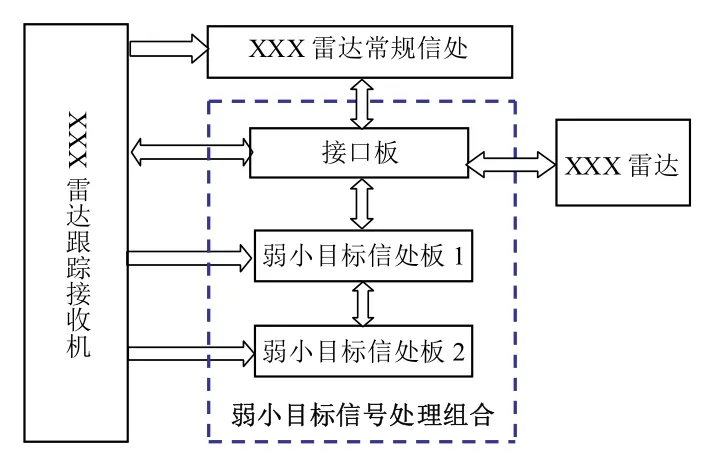
圖5 驗證試驗系統構成框圖
通過放球試驗跟蹤氣球懸掛的直徑200mm金屬球,定量測試兩種信號處理工作模式下的最大跟蹤距離,評估弱小目標檢測與跟蹤技術對提高最大跟蹤距離的效果。試驗總共跟球8次,兩種工作模式各4次。跟球試驗結果見圖6所示。
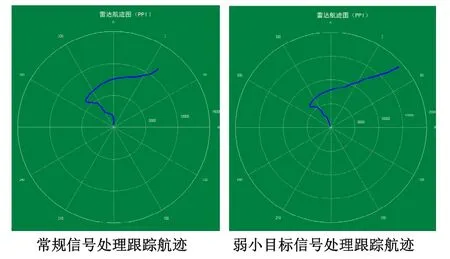
圖6 跟球驗證試驗航跡圖
試驗結果表明,對于200mm直徑的金屬球,弱小目標信號處理比常規信號處理的平均跟蹤距離提高了3.2km,折算到信噪比則是提高了3.9dB,對增加雷達的最大跟蹤距離效果明顯。
5 結論
基于多特征融合相關的弱小目標檢測與跟蹤技術的實施與驗證到目前為止已取得了初步成效,其對于弱小目標的檢測跟蹤能力較常規信號處理有較大的提高,若能將本研究成果運用到防空反導體系的雷達設備中,則可用最便捷可行的方式提高雷達的系統性能,現役雷達只需更換信號處理分系統,新研制的雷達也可省去為增強弱小目標探測跟蹤能力而增大天線口徑、增加發射機功率等所投入的大量經費,從而大大降低雷達設備乃至整個防空反導系統的研制成本。
[1]強勇,焦李成,保錚.一種有效的用于雷達弱目標檢測的算法[J].電子學報,2003,31(3):440-443.
[2]余農,吳常泳,楊心溢,等.紅外成像自動目標識別技術研究-計算模型與數據流程[J].現代防御技術,2003, (6):52-59.
Dim small target detection based on multi-characteristic fusion and application
Dim small target detection and tracking is a hot topic of radar signal processing. This paper introduces a new technique of dim small target detect-and-track. This signal processing technique using of image processing, based on perceptive field in human vision, and analyzed the characteristics of target, clutter and noise background to find the method of background rejection, and then detected and tracked dim small target in complex background with multi-characteristic fusion.
Dim small target detection; visual perception; multi-characteristic fusion
TN95
A
1008-1151(2015)05-0023-03
2015-04-12
宋蘇杭(1983-),男,中國兵器裝備集團成都火控技術中心微波室副主任,從事雷達發射機研制工作。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
當代陜西(2020年14期)2021-01-08 09:30:42
現代出版(2020年3期)2020-06-20 07:10:34
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
貴州師范學院學報(2016年4期)2016-12-01 03:54:07