高原型風力發電機組的變槳控制
2015-11-28 06:37:21林志明莫爾兵宋聚眾許娟
東方汽輪機 2015年3期
林志明,莫爾兵,宋聚眾,許娟
(東方電氣風電有限公司,四川德陽,618000)
高原型風力發電機組的變槳控制
林志明,莫爾兵,宋聚眾,許娟
(東方電氣風電有限公司,四川德陽,618000)
針對高原型變速變槳風力發電機組在額定風速附近容易失速,在額定風速以上載荷較大的問題,提出在額定風速以下根據葉片氣動特性進行變槳微動控制,通過變槳動作,調整葉片攻角使其遠離失速點;在額定風速以上時提出槳距角紋波技術,通過在傳統槳距角給定信號上疊加紋波信號間接加大塔架一階振動模態的阻尼,避免塔架頂部的大幅度振動位移。通過Bladed軟件對提出的變槳控制方式進行仿真分析,結果表明:相對傳統的變槳控制方式,提出的額定風速以下變槳微動控制能有效地避免風電機組失速;提出的槳距角紋波技術能增加塔架一階振動模態的阻尼,有效地減小風電機組在額定風速以上發電時塔架頂部的振動位移,降低塔架的疲勞載荷。
高原型,變速變槳,變槳控制,失速,機組疲勞載荷
0 引言
目前變速變槳風電機組已成為市場的主流形式,這種機組在低風速時按照最佳葉尖速比運行,追蹤最佳風能利用系數Cp,風能利用率較高,高風速時通過變槳限制氣動力矩,恒定功率輸出,具有發電量高、載荷小、功率品質好等優點。近幾年,隨著市場上變速變槳風電機組數量的倍增以及風資源的大規模開發,國內風資源較豐富且可開發的風電場越來越少,因此大多數整機廠商開始關注高原型、弱風型風力發電機組的開發,風輪直徑越來越大,塔架高度越來越高,導致機組的載荷也越來越大,高原上低空氣密度導致的葉片失速問題也時有出現。而對于如何通過變槳控制解決此類問題,實現機組性能的優化,目前有少數文獻提出利用獨立變槳技術來進行機組載荷優化[1-2], 也有少數文獻提出利用智能控制或自適應控制技術來優化機組的輸出功率[3-5],而大多數關于變槳方面的文獻涉及的都是變槳系統的建模及其控制系統的實現和優化方式[6-8],實際上,在風電機組的整個控制系統中,變槳系統只是一個執行機構,在系統設計時,可將其線性化為一個低通濾波器,如何給定低通濾波器 (變槳系統)的輸入才是變速變槳風電機組變槳控制的重點。
變速變槳風電機組通常有雙饋式和直驅式2種[9],而兩者卻具有共同的控制特點:低風速時槳距角限制在某一最優值 (比如0°),盡可能吸收功率,在高風速時通過變槳控制調整槳葉攻角限制功率,以使機組結構載荷不至于超出設計值。本文首先簡要地闡述了葉片的氣動特性,指出高原型風電機組在低空氣密度區域容易在額定風速附近失速,同時引入變槳微動控制方式,并且提出利用槳距角紋波技術,降低機組關鍵部位的疲勞載荷,同時借助某雙饋式2.0 MW機組,通過Bladed軟件仿真比較,驗證了本文提出的變槳控制的優越性。
1 額定風速以下防止失速的變槳微動控制
1.1 葉片的空氣動力學
1.1.1 攻角的概念
葉片翼型的攻角是用來描述葉片氣動特性的物理量,是來流速度方向與葉片翼型弦線之間的夾角[10]。假定葉片處于均勻來流速度V∞(1-a)中同時風輪以角速度Ω旋轉,則葉片半徑r處的翼型所受的力如圖1所示。
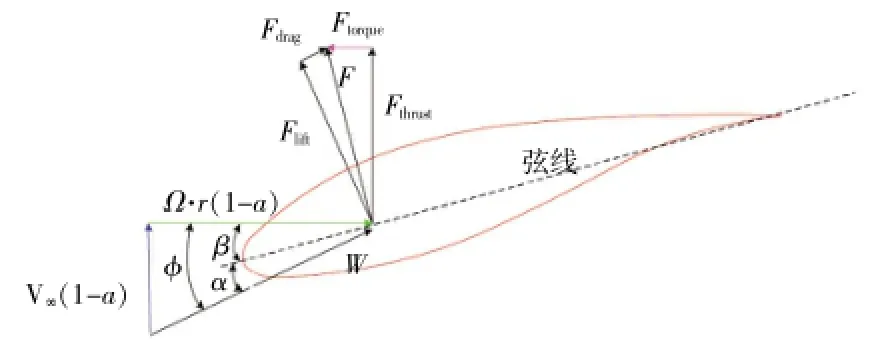
圖1 葉片翼型的氣動特性
合成后的來流速度W與風輪旋轉平面之間的夾角為Φ,β為槳距角,則翼型的攻角為:
α=Φ-β (1)
在葉片半徑r與δr范圍內所受到的與來流速度方向W垂直的升力[11]為:

與來流速度方向W平行的阻力[11]為:

式(2)、(3)中,ρ是空氣密度;c是葉片半徑r處的翼型弦長;Cl是翼型的升力系數;Cd是翼型的阻力系數。
1.1.2 翼型的失速特性
由式(2)、(3)可以看出,翼型的升力與阻力除了與空氣密度和來流速度W有關外,還與翼型本身的升力系數Cl和阻力系數Cd有關,不同的翼型有不同的升力系數和阻力系數,典型的升、阻力系數曲線如圖2所示[12]。
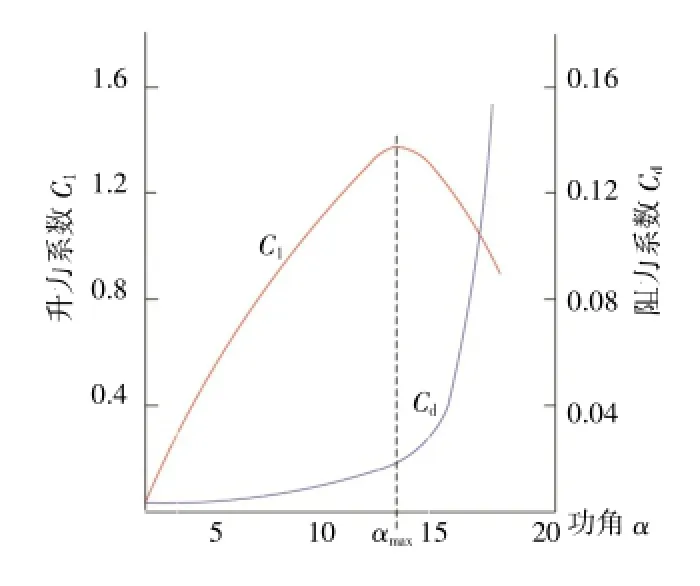
圖2 翼型的升力系數和阻力系數曲線
由圖2可以看出,當攻角超過αmax后,升力系數迅速減小,而阻力系數迅速增大,導致翼型的升力迅速下降,阻力迅速上升,該點稱為“失速點”。
實際上,無論是定槳失速型風力發電機組還是變速變槳型風力發電機組,其葉片都存在著失速特性,只不過前者恰恰利用了這一失速特性來限制額定風速以上的功率吸收,而后者則需要在額定風速以上不斷調整攻角來避開其失速點以維持額定功率的平穩輸出。
1.2 額定風速以下的變槳微動控制
1.2.1 高原型風力發電機組的失速
變速變槳型風力發電機組的葉片在設計時通常都能保證機組在額定風速附近偏離失速點,但是由于高原上空氣密度稀薄,氣流中所蘊含的能量少,風力發電機組要達到額定功率所需要的風速要比標準空氣密度下高得多,由于在額定風速以前,變速變槳型風力發電機組的風輪轉速已經達到上限,傳統的變槳控制通常將槳距角維持在最佳槳距角位置,如0°,并且保持不變,因此,隨著風速的增加,圖1中的Φ角逐漸增大,而槳距角β此時通常保持不變,則攻角α不斷增大,最終導致葉片的攻角超過 “失速點”,引起風力發電機組失速。
當機組在運行中出現失速以后,噪聲常常會突然增加,而且還會引起機組振動以及運行不平穩等現象。因此需要避免變速變槳型風力發電機組在任何情況下出現失速。
某雙饋式機組額定風輪轉速15.13 r/min,額定功率2.0 MW,額定風速10.2 m/s,圖3是該機組在標準空氣密度和0.78 kg/m3空氣密度下產生的功率曲線對比。
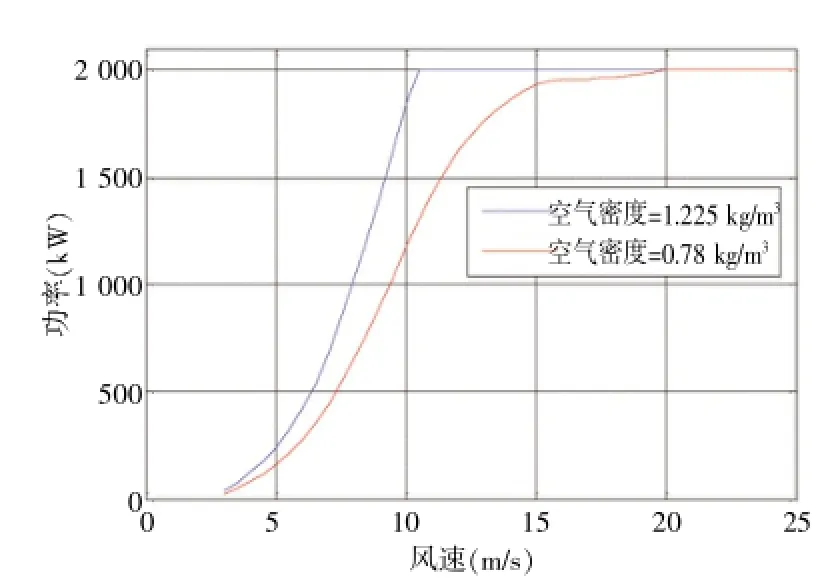
圖3 某雙饋式機組在不同空氣密度下的功率曲線
由圖3可以看出,在標準空氣密度下,機組在風速10 m/s左右便已達到額定功率,而在空氣密度只有0.78 kg/m3的情況下,即使風速達到18 m/s也達不到額定功率,這是因為葉片在風速15 m/s附近便已出現失速現象。
對于已經投入運行的高原型風力發電機組,如果出現失速現象,則從圖1中,不難得出解決失速問題的辦法:
(1)提高風輪葉尖速度,減小Φ角。這可以通過提高發電機額定轉速、加大風輪直徑以及減小齒輪箱速比來實現;
(2)降低機組額定功率,提前達到滿負荷,實現變槳動作。如可將額定功率2.0 MW的機組降容到1.7 MW使用,則由圖3可知,機組在風速達到11 m/s左右便已達到額定功率1.7 MW,此時機組并不會失速,而此后機組必會調節槳距角限制功率,也不會出現失速現象;
(3)機組達到額定功率之前提前增大槳距角β。
對于第(1)點,由于電機、變頻器等方面的電氣限制,往往很難再提高發電機的額定轉速,另外,更換葉片和齒輪箱都會直接導致維護成本大幅增加;第(2)點對年發電量損失較大;而第(3)點只需要修改控制策略,不會增加任何成本。
1.2.2 變槳微動控制方式
本文提出在額定風速以下便開始進行變槳微動調節,增大槳距角β,使得葉片翼型的升力系數在高風速下且機組未達到額定功率之前仍然可以保持在線性范圍之內,這能有效地解決高原型風力發電機組的失速問題。根據簡化的風力機理論,葉片半徑r處的入流傾角[11]為:
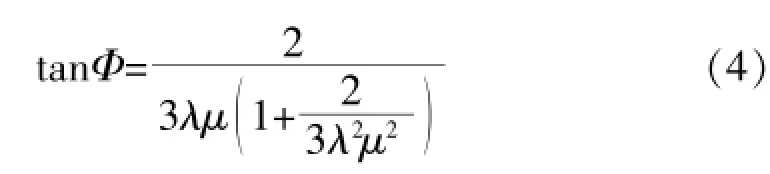
式中,λ為葉尖速比,μ=r/R,R為風輪半徑,Φ與λ之間的關系近似反函數,如圖4所示。
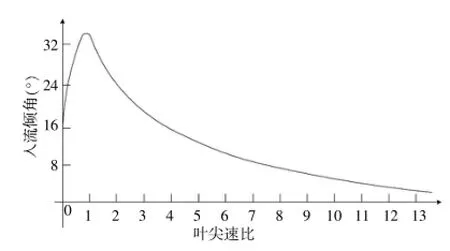
圖4 翼型入流傾角與葉尖速比之間的關系
為了避免葉片失速,攻角需滿足式(5)[11]。

由式(4)、(5)即可得到槳距角需要滿足的關系:

對于具有特定槳葉的風力發電機組,風輪半徑R確定,其翼型的升力系數Cl也可以確定,因此可以利用式(6)根據當前的葉尖速比調整槳距角使葉片遠離失速區。
變槳微動控制的控制器結構如圖5所示。一般的PI控制器都要對其輸出進行限幅,傳統變槳控制將PI輸出的最小值限制在最佳槳距角位置(如0°),將最大值限制在順槳位置 (如90°),而從圖5可以看出,變槳微動控制方式將按式(6)對PI的輸出下限進行限制,一旦β>0之后,變槳系統便能及時響應,實現提前變槳。
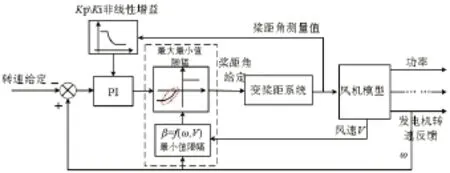
圖5 變槳微動控制結構
2 高風速時載荷優化的變槳控制
2.1 控制目標
對于大型變速變槳風力發電機組,2個主要的控制目標一個是捕獲盡可能多的能量,另一個就是盡可能降低關鍵部位的載荷,例如塔架載荷,傳動鏈載荷等。因為塔架成本在整個風電機組中占有相當大的分量,所以盡可能地降低塔架載荷,對于降低機組成本、提高機組性價比具有重大意義。
本文在分析塔架振動模態的基礎上,指出塔架振動的模態阻尼很小,在正常湍流風作用下塔架頂部振幅較大,容易引起塔架疲勞載荷的增加。隨后提出利用槳距角紋波技術改變風輪推力加大塔架一階振動模態阻尼,這種控制方式在不增加任何成本的基礎上能有效地降低塔架的疲勞載荷,降低機組設計成本,提高機組性價比。
2.2 塔架振動模型
將鋼管式塔架看成一個質量為m、長度為h的懸臂梁,將機艙和風輪等效成一個質點M,則典型的塔架模型如圖6(a)所示。
忽略偏航、塔架高階模態的影響,可將塔架的振動問題簡化為一個單自由度系統的強迫振動,根據圖6(b)可得系統的運動微分方程為:

式中,M'為塔架的等效質量與機艙的等效質量之和,有M'=M+0.23 m[13];K為塔架等效剛度,根據振動力學[14-15],有K=3EI/h3;D為塔架等效阻尼系數;x是塔架頂部的振動位移;Fthrust為風輪所受到的推力。
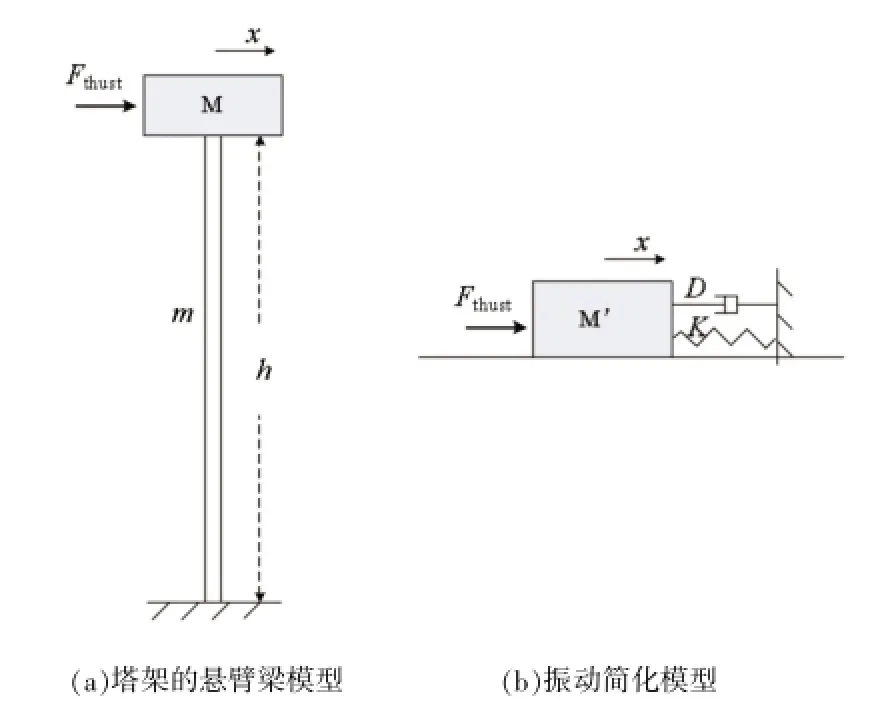
圖6 典型的塔架模型
以某雙饋式2.0 MW機組為例,從圖7所示的坎貝爾圖中可得知塔架的一階模態阻尼系數D很小,僅為0.082。由振動理論可知,阻尼小的系統響應幅值大,衰變慢,而對于風電機組中的塔架在風輪推力作用下容易引起頂部的振動位移幅值偏大,引起塔架疲勞載荷的大幅度增加,故系統設計時要盡量加大塔架模態阻尼。
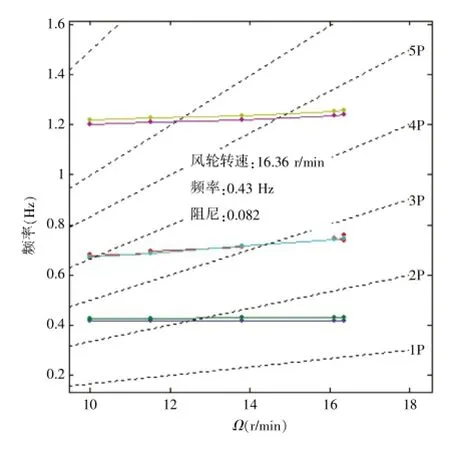
圖7 某雙饋式機組坎貝爾圖
由圖1可知,風輪推力與風輪平面垂直,與升力Flift之間的夾角為Φ,因此β與風輪推力之間存在緊密關系,如果能通過調整槳距角,使得在風輪推力Fthrust的基礎上產生一個額外的力ΔFthrust,且ΔFthrust=-kx˙,則有:

因此,運動方程可以變為:

顯然,塔架的等效阻尼從D增加到了 (D+ k)。
而ΔFthrust與-kx˙之間滿足如下關系:

因此有:

2.3 塔架阻尼器的設計
由式(11)可知,要想通過調節槳距角增加塔架一階模態的阻尼,必須測出塔架頂部的振動速度x˙,而在實踐工程當中,測量塔架頂部的振動加速度要比測量振動速度簡單得多,只需要在塔架頂部安裝振動加速度傳感器即可。通過對振動加速度x¨的積分得到振動速度x˙。因此可設計塔架阻尼器結構如圖8所示。
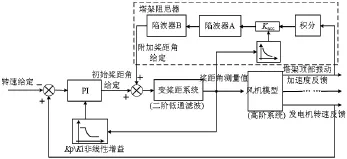
圖8 塔架阻尼器結構圖
圖中陷波器A是用來校正相位的,陷波器B用來屏蔽槳葉穿越頻率3P、6P等的影響,形式為:
加入塔架阻尼后,從風速給定到塔架頂部振動速度之間的頻域特性如圖9所示。
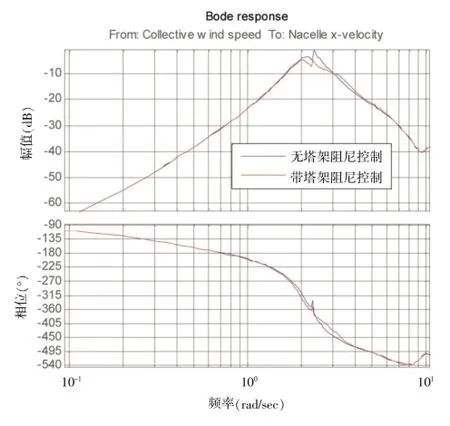
圖9 某雙饋式機組塔架頂部振動特性
由圖9可以看出,在加入塔架阻尼控制之后,在塔架一階振動模態頻率附近,機艙頂部的振動速度幅值有所減小,說明塔架阻尼起到了一定的作用。
在風速的單位階躍給定下,槳距角響應和塔架頂部振動位移的響應分別如圖10、圖11所示。
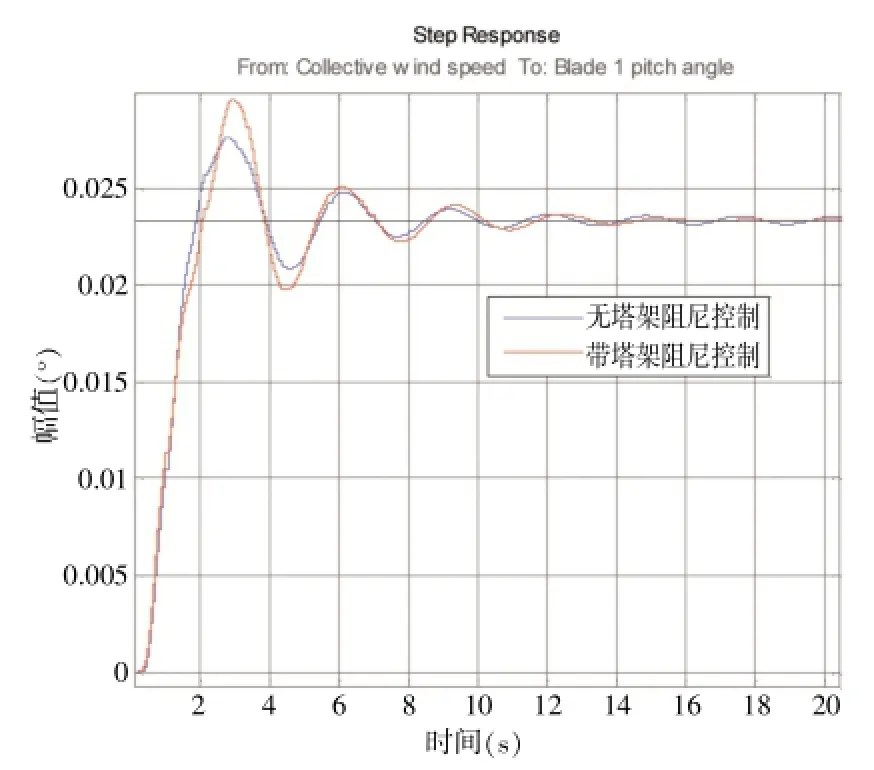
圖10 某雙饋式機組槳距角在單位階躍風速下的響應
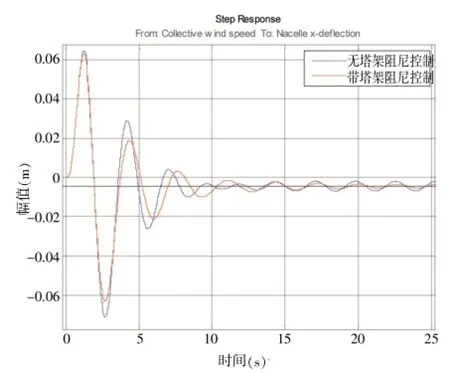
圖11 某雙饋式機組塔架頂部振動位移在單位風速階躍下的響應
由圖10、圖11可以看出,系統在加入塔架阻尼后,在單位風速階躍給定下,槳距角的單位階躍響應超調量有所增加,說明變槳系統比之前要有更多的變槳動作,而塔架頂部振動位移的響應幅值有所減小,而且響應比之前衰減得更快,說明塔架阻尼確實有所增加,經過進一步的仿真分析可得,塔架一階模態的阻尼由之前的0.082增加到0.267,證明槳距角紋波信號在增加塔架阻尼方面效果良好。
3 仿真結果
3.1 變槳微動控制在改善葉片失速方面的優越性
本文借助Bladed軟件進行機組的失速特性研究和疲勞載荷計算。
某高原型雙饋式機組在空氣密度為0.78 kg/m3的風場曾出現失速現象,因此選取該空氣密度對2種控制方式進行仿真分析。為了便于比較,仿真中采用靜態風速,結果如圖12所示。
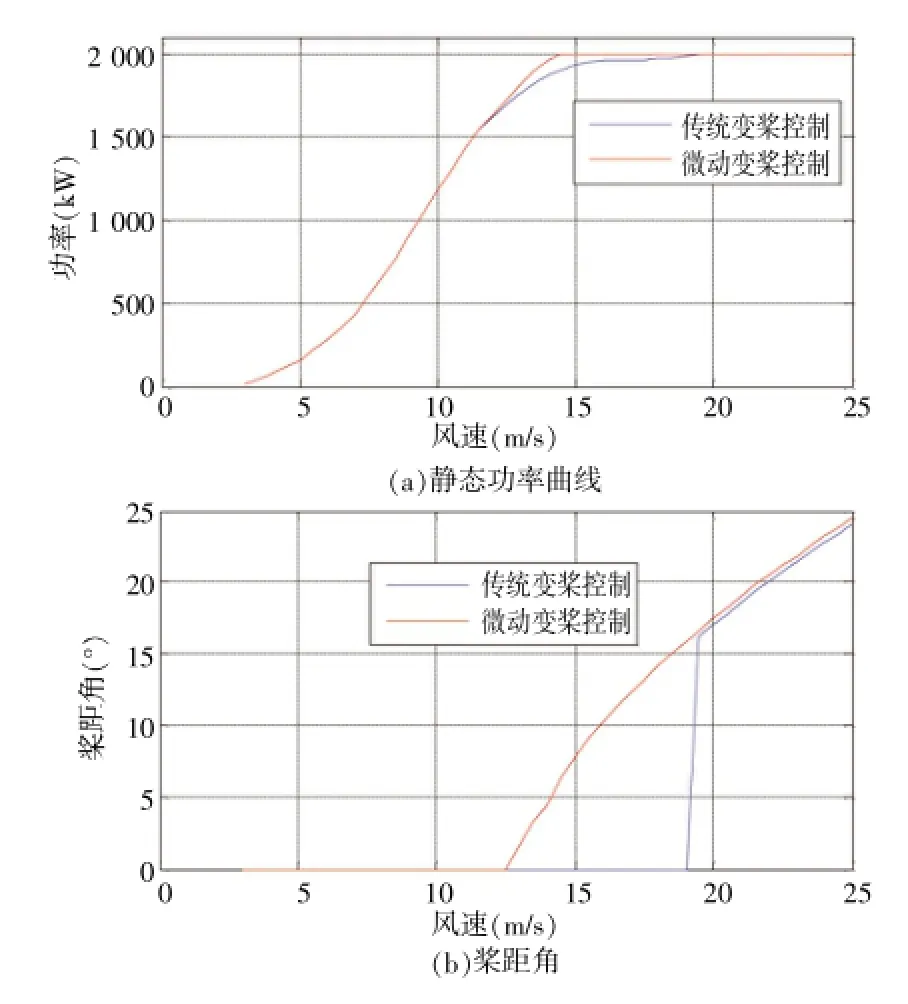
圖12 2種控制方式靜態功率曲線比較
由圖12可以看出,機組在低風速段功率曲線一致,這是因為在低風速情況下,葉片并不會失速,2種控制方式的槳距角都維持在0°,追求最佳Cp曲線。在風速達到13 m/s左右,變速階段已經結束,風輪轉速已經達到額定轉速,傳統的變槳控制方式因為功率未達到額定功率,因此要維持槳距角在0°,葉片開始失速,此后風速越大,葉片失速越嚴重,而此時變槳系統又不會主動進行變槳,葉片失速后機組噪音變大,嚴重時導致機組劇烈振動;而變槳微動控制方式在風速13 m/ s,功率未達到額定功率2.0 MW時便開始主動增大槳距角,減小翼型的攻角,有效地避免了葉片失速。在變槳微動控制方式下,機組在14 m/s風速下便達到額定功率。因此,相比較于傳統的變槳控制方式,低空氣密度時變槳微動控制在防止葉片失速方面有一定的優越性。
3.2 高風速時有、無塔架阻尼的載荷比較
圖13是針對某雙饋式機組有、無載荷優化控制時的仿真結果。因為載荷優化的效果體現在額定風速以上的各個工況下,所以本文根據GL標準取DLC1.2下18 m/s時的仿真結果作比較。
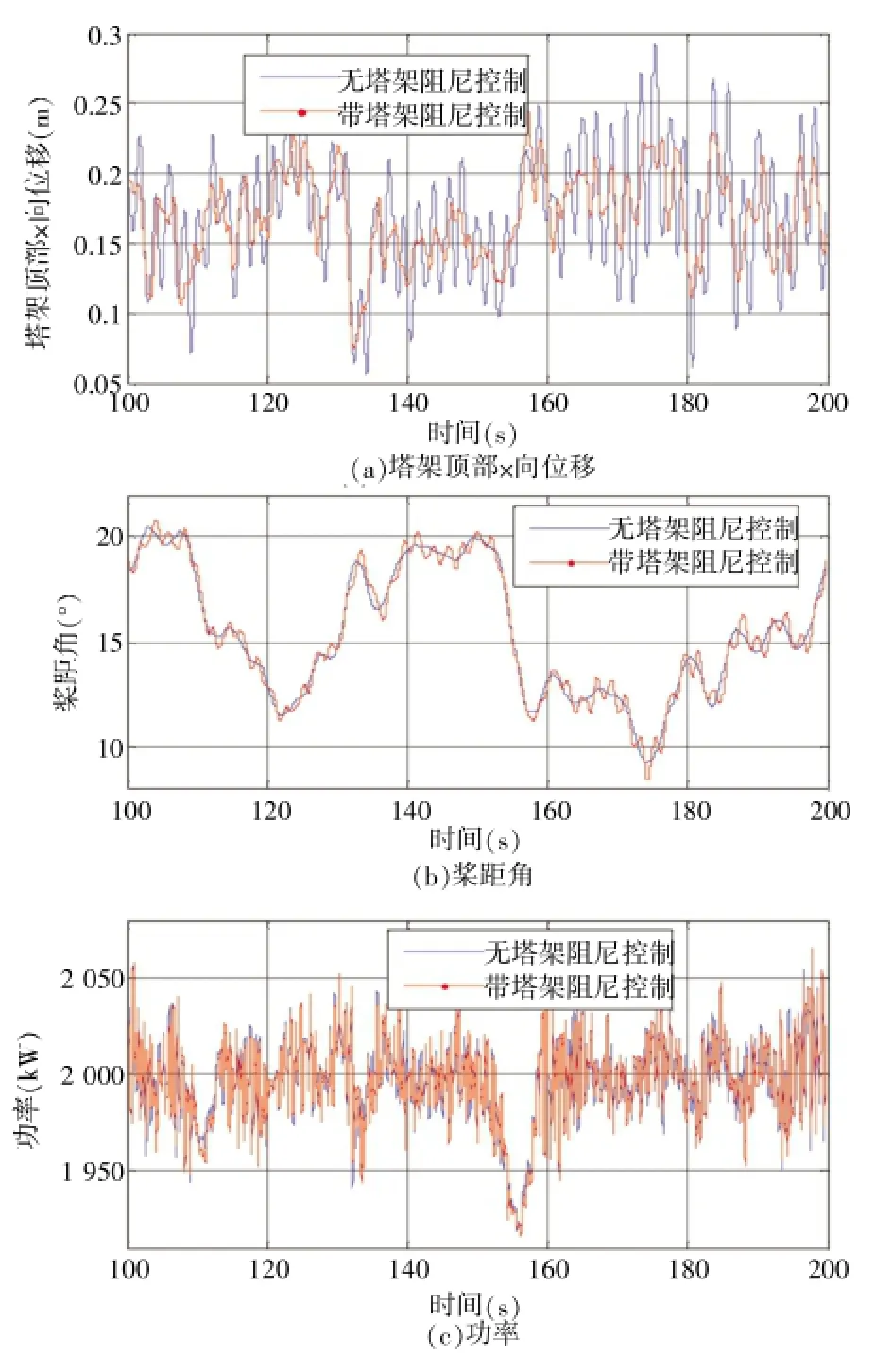
圖13 某雙饋式機組有無塔架阻尼器仿真結果
從仿真結果中可以得出,在加入塔架阻尼之后,塔架頂部x方向振動位移變小,如圖13(a)所示,這是因為在傳統變槳控制方式的槳距角給定信號上疊加了槳距角紋波信號,因此隨之而來的是變槳系統的頻繁動作,如圖13(b)所示,而從圖13(c)中可以看出,發電功率在2種控制方式下差別不大,功率品質并沒有因為頻繁的變槳動作而變差。
由于槳距角紋波信號在整個變槳控制環節中相當于擾動信號,因此會在一定程度上影響著系統的穩定性,在設計時不可一味地加大塔架阻尼,必須以保證變槳控制環節的穩定性為前提。圖14是加入塔架阻尼控制后變槳控制環節的開環Bode圖,該圖說明了在加入塔架阻尼控制后并沒有影響該環節的穩定裕量。
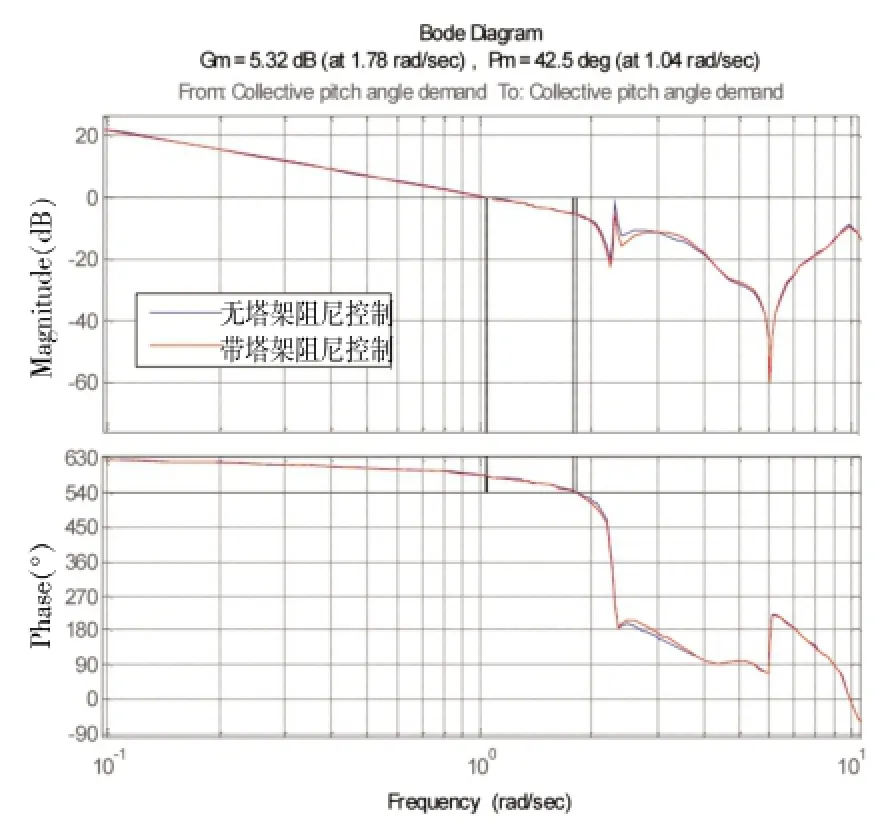
圖14 某雙饋式機組有無塔架阻尼時變槳控制環節穩定裕量
另外,由于變槳系統的頻繁動作會在一定程度上影響變槳軸承的疲勞壽命,而且還容易導致變槳電機過熱,因此在設計塔架阻尼時,需要權衡變槳軸承疲勞載荷、電機過載能力與塔架疲勞載荷之間的矛盾,也需要考慮槳距角的頻繁變化與變槳系統響應能力之間的關系。
通過Bladed軟件仿真可以定量地得出,在加入塔架阻尼之后,塔架頂部My方向和偏航軸承Mxy方向的疲勞載荷降低幅度較大,在8%以上,塔架底部My方向疲勞載荷降低約5%,說明在加入塔架阻尼之后有效地降低了機組關鍵部位的疲勞載荷,降低了成本,提高了機組的性價比。
4 結論
本文在分析高原型變速變槳風電機組在低空氣密度下容易失速的基礎上,提出了某雙饋式機組在未達到額定功率之前采用變槳微動控制方式提前調節槳距角,使得葉片翼型在高風速下都能保持合理的攻角,避免葉片失速;同時指出在塔架一階模態阻尼較小并且在湍流風作用下塔架頂部容易產生較大振動位移的情況下,采取在傳統的變槳給定信號上根據塔架頂部的振動加速度信號疊加槳距角紋波信號,降低塔架疲勞載荷。仿真結果表明:變槳微動控制方式能有效避免風電機組在低空氣密度下失速,疊加的槳距角紋波信號能降低關鍵部位疲勞載荷5%以上。
[1]刑作霞,陳雷,孫宏利,等.獨立變槳距控制策略研究[J].中國電機工程學報,2011,31(26):131-138
[2]姚興佳,馬佳,郭慶鼎.基于模糊控制的風電機組獨立變槳距控制[J].可再生能源,2011,29(06):34-38
[3]姚興佳,張雅楠,郭慶鼎.風力發電機組的多模變槳距控制[J].沈陽工業大學學報,2009,31(02):149-153
[4]夏長亮,宋戰鋒.變速恒頻風力發電系統變槳距自抗擾控制[J].中國電機工程學報,2007,27(14):91-95
[5]何玉林,呂向飛,黃帥,等.變速變槳風力發電機組的優化控制[J].可再生能源,2012,30(01):33-37
[6]王佳雯,龔華軍,陳永.大型風力發電機組變槳距控制系統設計與仿真[J].電氣自動化,2011,33(05):18-21
[7]孟彥京,常杰,朱玉國.風力發電變槳控制系統設計[J].電氣傳動,2010,40(05):41-43
[8]竇真蘭,程孟增,蔡旭,等.大型風機變槳距控制系統的研究[J].電機與控制應用,2011,38(03):38-43
[9]李建林,高志剛,付勛波,等.幾種典型的風力發電系統對比分析[J].電源技術應用,2007,10(9):54-60
[10]葉杭冶.風力發電機組的控制技術[M].北京:機械工業出版社,2006:14-33
[11]Tony B,David S,Nick J,et al.Wind Energy Handbook [M].Chichester:John Wiely&Sons,Ltd.,2001:41-77
[12]van der Hooft E L,Schaak P,van Engelen T G.Wind turbine control algorithms[M].Holland:Dutch Ministry of Ecnomic Affairs,2003:22-31
[13]何顯富,盧霞,楊躍進,等.風力機設計、制造與運行[M].北京:化學工業出版社,2009:224-225
[14]聞邦椿.機械設計手冊[M].北京:機械工業出版社,2010: 1-123-1-147
[15]高淑英,沈火明.振動力學[M].北京:中國鐵道出版社, 2011:09-30
Pitch Control of Plateau Type Variable Speed Variable Pitch Wind Turbine
Lin Zhiming,Mo Erbing,Song Juzhong,Xu Juan
(Dongfang Electric Wind Power Co.,Ltd.,Deyang Sichuan,618000)
For plateau type VSVP(variable speed variable pitch)wind turbine which is very easy to stall around rated speed and often generate large loads above rated speed,a micro-motion pitch control scheme around rated speed is proposed to modify the attack angle of airfoil according to its aerodynamic characteristics,so that the attack angle of airfoil can be far away from stall zone.A pitch ripple control scheme adopted here can increase the tower damper indirectly by adding a ripple signal to the original pitch angle,which can avoid large loads and decrease tower top vibration displacement above rated speed.Comparing Bladed simulation results of the pitch control scheme here with the traditional pitch control's,the way of pitch control presented here can avoid stall in low air density zone around rated speed,and can also reduce the load of some crucial parts of the turbine above rated speed.
plateau type,variable speed variable pitch,pitch control,stall,turbine fatigue load
TP273
A
1674-9987(2015)03-0033-08
10.13808/j.cnki.issn1674-9987.2015.03.009
項 目:四川省科技支撐計劃項目資助項目 (2014GZ0084)
林志明(1982-),男,工程師,碩士,2007年畢業于沈陽工業大學電力電子與電力傳動專業,主要從事風力發電機組控制技術的研究工作。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15