帶側窗動能殺傷器直接力姿態控制
2015-12-05 05:11:14韓英宏雷延花陳萬春嚴佳民廖選平
航天控制 2015年4期
關鍵詞:發動機
韓英宏 雷延花 梁 卓 陳萬春 嚴佳民 廖選平
1.中國運載火箭技術研究院,北京100076
2. 北京航空航天大學,北京100191
目前,典型的遠程高空反TBM 導彈一般采用紅外尋的末制導[1-2],而此類防空導彈以很高的速度飛行,氣動加熱嚴重,如果將導引頭探測窗口直接安裝在頭部,氣動光學效應將導致紅外導引頭無法正常工作。為了減小氣動加熱的影響,需要將導引頭探測窗口安裝在導彈的側面,這樣就會導致視線不對稱,需要協調導彈姿態和軌跡的控制,對控制系統的設計引入新的課題:側窗探測條件下的制導控制技術[3]。本文以帶側窗的動能殺傷器(KKV)為研究對象,設計了滿足要求的直接力姿態控制方案,為殺傷器精確制導提供了有利條件。
1 KKV 模型
1.1 帶側窗的導引頭模型
KKV 導引頭探測窗口安裝在其側面,是經過導彈頭錐其中一條母線的平面,導引頭通過側窗去發現目標,為便于描述,首先定義側窗坐標系如圖1 所示。
圖1 側窗坐標系示意圖
側窗坐標系原點oc取在導引頭的回轉中心,位于彈體軸上;ocxc軸在彈體縱對稱平面內,平行于側窗表面,指向彈體頭部為正;ocyc在彈體縱對稱平面內,垂直于ocxc軸,指向上為正;oczc垂直于縱對稱平面ocxcyczc,方向按右手定則確定。
由定義可知,彈體系與側窗系均與彈體固連,為動坐標系,且2 者的方位只需用一個角度Δ(該角度值為KKV 的半頭錐角,本文取為15°)即可確定,ocxc在o1x1下方Δ 為正值。假設目標在側窗系中的坐標為,則其在彈體系中的投影為:
對于視場的約束,應該體現在側窗系下的視線角。本文的視線角約束為:qβc∈(-5°,5°),qεc∈(25°,75°),其中qβc和qεc分別為側窗系下的視線方位角與視線高低角,計算公式如下:
1.2 直接力姿控發動機模型
本文研究的KKV 有6個姿控發動機安裝在攔截器的尾部,其布局如圖2 所示。
控制俯仰運動時需要1,3 或2,4 工作,控制偏航運動時需要5 或6 工作,控制滾轉運動時需要2,3 或1,4 工作。
圖2 姿控發動機安裝示意圖
由于姿控發動機的推力比較小,在接收到開機指令后能瞬間達到穩定值,因此忽略推力上升時間,將其看作常值。姿控發動機工作時產生的作用力矩分別是:
式中,Mx,My,Mz依次表示姿控發動機在彈體坐標系的作用力矩;Ly表示發動機1 ~4 推力作用點到彈體軸線的距離;Lx表示姿控發動機推力作用點到KKV 質心的距離;Fy,Fz表示相應工作狀態下俯仰和偏航方向的作用力;Fi為滾動控制時發動機的推力大小。
2 姿控方案設計
2.1 滾動通道控制方案設計
當導引頭開始工作時,目標很可能沒有在視場范圍內,需要KKV 調整姿態去捕獲目標。由于滾轉和俯仰通道共用4個姿控發動機,若2個通道均需要控制,則要考慮通道控制的優先級問題[4]。為減弱各通道之間的相互影響,本文優先控制滾轉通道,當滾轉通道無需再控制的情況下再進行其它通道控制。
KKV 滾動通道的轉動動力學方程如下:

式中,Jx1,Jy1,Jz1為KKV 的轉動慣量,在對稱外形下,Jy1= Jz1;Mzx,Mgx為姿控發動機產生的滾動力矩,Mqx為氣動力矩。姿控發動機推力恒定不變,在高空忽略空氣動力的條件下,角速度變化的斜率應該保持不變。
假設中末制導交班時刻滾轉角速度為0,期望系統按照圖3 ~5 所示的理想情況進行控制。本文的滾動控制策略以側窗系下視線方位角為依據,其最佳值為0° 。當達到最佳視線方位角時,理想的滾動角速度應該為0,使視線穩定在該位置。在目標剛好進入到導引頭側窗視場的時刻,即tc-Δt 時,控制力矩換向。為保證滾轉角速度穩定時為0,加速滾動時間應與減速滾動時間相等,均為Δt,且其最大值Δtm應滿足:
式中,qβm為側窗系下視線方位角的邊界值。
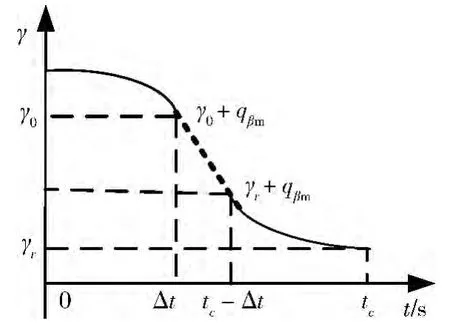
圖3 滾轉角變化曲線

圖4 滾轉力矩
根據上面的分析,設計如圖6 所示的控制流程。
在捕獲到目標之后,該控制方案同時可以保證導引頭能很好地跟蹤目標。
2.2 俯仰和偏航通道控制方案設計
俯仰和偏航通道控制可以采用滑模控制[5],以俯仰通道為例,選取滑動模態:
式中,φ 為KKV 的俯仰角,φr為其跟蹤指令,控制量為姿控發動機的開、關機信號指令。這里跟蹤指令選為地面系的視線高低角,但由于側窗結構的存在,還要減去KKV 的半頭錐角。若有最佳視線角要求,則可以跟蹤常值視線角。
1)S1≥Δ1,發動機2,4 開,1,3 關;
2)S1≤- Δ1,發動機2,4 關,1,3 開;
比例系數K1,K2的選取對控制精度和跟蹤速度都有影響,因此其大小選擇至關重要。一般情況下,可以依托具體的模型,通過大量仿真來逐步篩選出合理的數值。
偏航通道用5,6 兩個發動機進行控制,方案與俯仰通道類似,其滑動模態選擇如下:
式中,ψ 為KKV 的偏航角,ψr為其跟蹤指令,這里選為地面系下的視線方位角。對于2個比例系數和開機閾值的影響,分析方法與俯仰通道相同。
3 仿真分析
根據上面提供的方案,進行大氣層外KKV 姿態控制仿真研究。采取準滑模控制時,俯仰和偏航通道控制器的相關參數設置如表1 所示。仿真結果如圖7 ~10 所示。
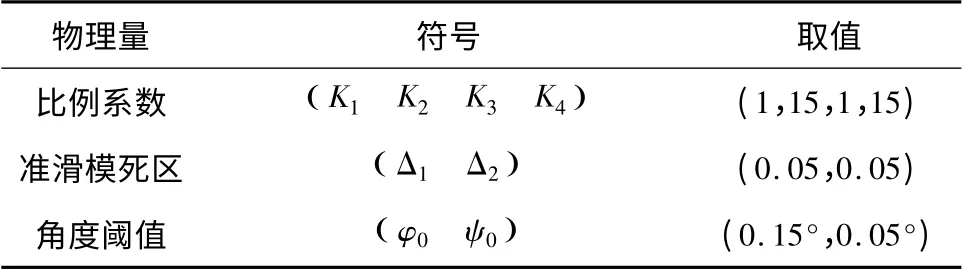
表1 KKV 姿控準滑模控制仿真參數
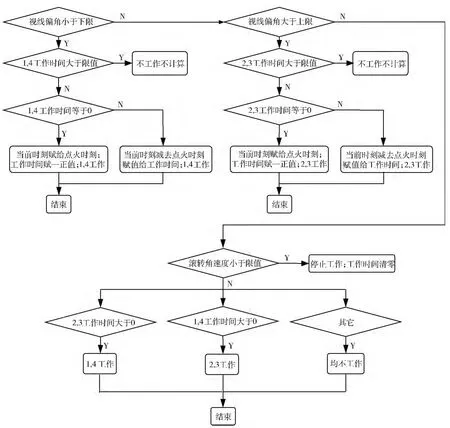
圖6 滾動通道控制流程圖
從圖7 可見,根據視線方位角對滾動通道進行控制,有效保證了視線方位角回歸到視場內,圖8 中俯仰和偏航2個通道的角度跟蹤誤差均趨近于0,3個通道的控制策略,使側窗系下的視線高低角和視線方位角都在規定的范圍之內,表明導引頭能很好地捕獲和跟蹤目標,如圖9 所示。圖10 為3個通道的發動機工作情況,可以看到,為了在穩定跟蹤目標前提下能夠最大效率地減小視線角速度,在目標進入導引頭視場之后進行的俯仰和偏航控制,使這2個通道的發動機開關頻率較高,且由于控制抖動,使目標經常到達視場邊界,需要進行滾動控制使其回到視場中心。
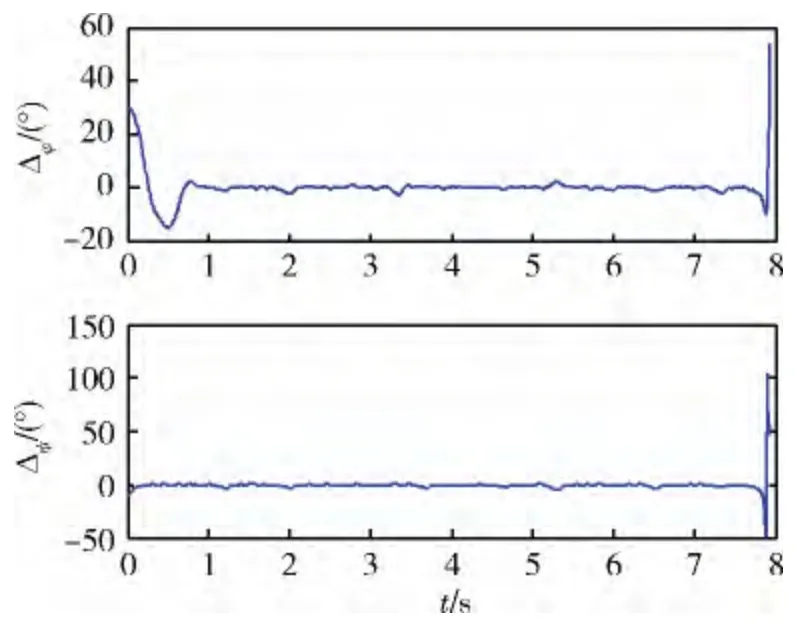
圖8 俯仰和偏航通道跟蹤誤差
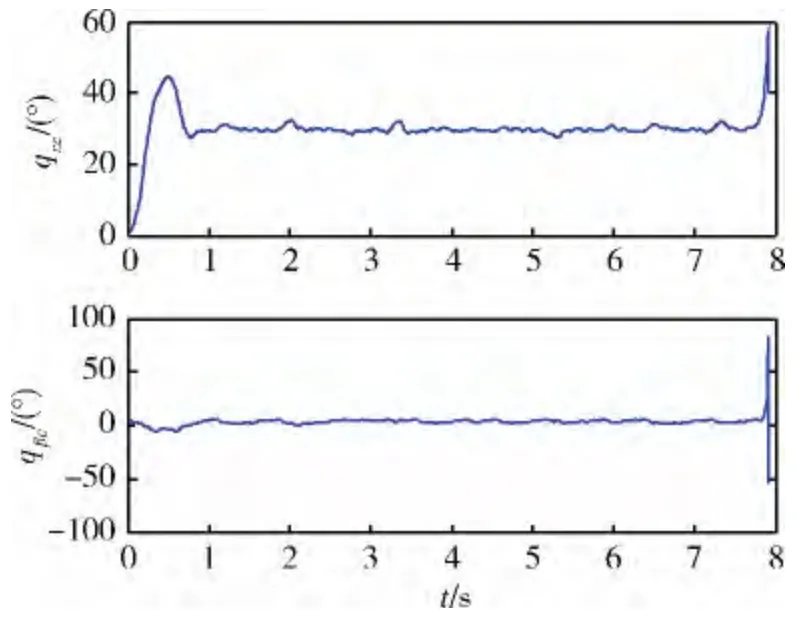
圖9 側窗系下視場角變化曲線
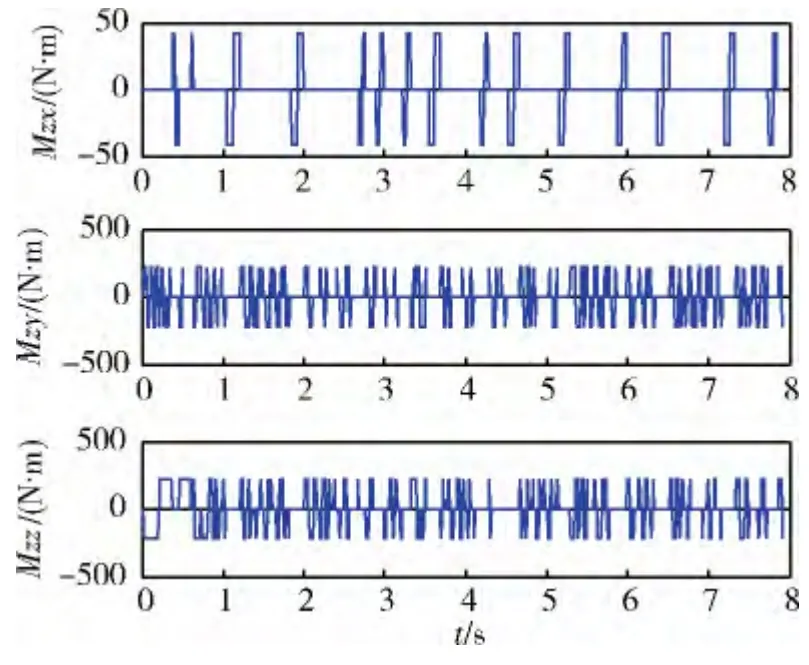
圖10 姿控發動機工作情況
4 結論
給出了KKV 控制的姿控發動機模型,針對帶側窗的導引頭,定義了側窗坐標系,計算出側窗系下的視線高低角和視線方位角,并根據這2個角度的視場約束,設計了高空滾動控制策略,用準滑模控制方法設計了俯仰和偏航通道的控制方案。仿真結果表明,本文設計的直接力姿態控制方案簡單易行,對帶側窗導引頭的飛行器姿態控制有較強的適應性,具有一定的工程應用前景。
[1]王戌瑞. 攔截彈中的紅外技術[J]. 激光與紅外,1999,29(1):3-8.(Wang Xurui.The infrared technology for the interceptor[J]. Laser and Infrared,1999,29(1):3-8.)
[2]范晉祥.美國動能攔截彈紅外成像導引頭的發展分析[J]. 紅外與激光工程,2009,38 (1):1-6. (Fan Jinxiang. Development analysis of infrared imaging seekers of kinetic kill vehicles in america[J]. Infrared and Laser Engineer,2009,38 (1):1-6.)
[3]支強,蔡遠利.動能殺傷器側窗定向機制分析及建模[J].西安交通大學學報,2012,46(1):91-97. (Zhi Qiang,Cai Yuanli. On side window orientation of kinetic kill vehicle[J]. Journal of Xi’an Jiaotong University,2012,46 (1):91-97.)
[4]B J Strauss,R J Gravina,C J Hasenzahl,et al. All Attitude guidance and control for endoatmospheric intercepts[C]. AIAA SDIO Annual Interceptor Technology Conference,1993,AIAA 93-2643.
[5]Yeh F. K,Chien H. H,Fu L. C,Nonlinear optimal sliding mode midcourse controller with thrust vector control[C]. Proceedings of the American Control Conferrence,2002,1:348-353.
[6]宋明軍,魏明英.側窗探測條件下的制導控制系統設計方法研究[J]. 現代防御技術,2007,35(5):71-75.(Song Mingjun,Wei Mingying. Control and guide system design method for side window detection[J].Modern Defence Technology,2007,35(5):71-75.)
[7]楊寶慶,姚郁,賀風華. 大氣層外攔截器開關式姿態控制律設計[J]. 哈爾濱工業大學學報,2010,42(1):5-8.(Yang Baoqing,Yao Yu,He Fenghua. Design of on-off Attitude Control Law Based on Model Predictive Control[J]. Journal of Harbin Institute of Technology,2010,42 (1):5-8.)
[8]章虹虹,姜杰.準滑模控制在大氣層外攔截器姿態控制中的應用[J]. 航天控制,2007,25 (5):39-42.(Zhang Honghong,Jiang Jie. The application of pseudsliding mode control in attitude control for EKV[J].Aerospace Control,2007,25 (5):39-42.)
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15
