電子節(jié)氣門動(dòng)力失控工況診斷及故障模式管理
2015-12-06 07:50:24漆正剛GarySpring許勻峰趙新慶
重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)) 2015年12期
關(guān)鍵詞:發(fā)動(dòng)機(jī)信號(hào)
漆正剛,Gary Spring,許勻峰,王 聰,詹 迅,趙新慶
(重慶長安偉世通發(fā)動(dòng)機(jī)控制系統(tǒng)有限公司產(chǎn)品研發(fā)部,重慶 401122)
電子節(jié)氣門(electronic throttle body,ETB)廣泛應(yīng)用于現(xiàn)代汽車汽油發(fā)動(dòng)機(jī)。相較于傳統(tǒng)的機(jī)械式節(jié)氣門,在發(fā)動(dòng)機(jī)管理系統(tǒng)(engine management system,EMS)中引入電子節(jié)氣門控制,為實(shí)現(xiàn)從動(dòng)力源發(fā)動(dòng)機(jī)到變速傳動(dòng)系統(tǒng)的動(dòng)力控制提供了新的控制維度,通過綜合控制節(jié)氣門開度、點(diǎn)火提前角、噴油脈寬與變速器速比為車輛實(shí)現(xiàn)最優(yōu)工況提供了更多可能性[1-2]。在實(shí)現(xiàn)更優(yōu)、更精準(zhǔn)控制的同時(shí),電子節(jié)氣門的引入也增加了EMS硬件的復(fù)雜性,降低了硬件系統(tǒng)的可靠性,包括增加了測量節(jié)氣門實(shí)時(shí)位置的節(jié)氣門位置傳感器(throttle position sensor,TPS)、驅(qū)動(dòng)節(jié)氣門軸轉(zhuǎn)動(dòng)的直流伺服電機(jī)及其相關(guān)的連接線路等,這些都可能成為引發(fā)電子節(jié)氣門控制失效的誘發(fā)因素。
目前國內(nèi)學(xué)界對于電子節(jié)氣門的失效方式基本都劃分為節(jié)氣門位置傳感器線路的斷路和短路故障、驅(qū)動(dòng)電機(jī)控制線路的斷路和短路故障,以及采用冗余設(shè)計(jì)時(shí)兩路節(jié)氣門位置傳感器的校核一致性故障等[3-5]。對于在線路連接狀態(tài)良好的情況下由于傳感器內(nèi)部部件損傷導(dǎo)致的傳感器信號(hào)偏移而引起的信號(hào)測量失準(zhǔn),以及直流伺服電機(jī)勵(lì)磁線圈老化、碳刷磨損、電磁干擾等導(dǎo)致的電機(jī)工作狀態(tài)發(fā)生突變等情況[6-8],目前尚無較好的識(shí)別和應(yīng)對策略。雖然發(fā)生上述嚴(yán)重故障的概率較低,但是一旦發(fā)生大幅度信號(hào)偏移或者電機(jī)工作狀態(tài)突變,導(dǎo)致電子節(jié)氣門開度發(fā)生階躍性激增,將會(huì)直接引發(fā)車輛瞬時(shí)加速度的激增,出現(xiàn)動(dòng)力失控,影響行車安全。如果不能及時(shí)識(shí)別并做出主動(dòng)性干預(yù),將會(huì)導(dǎo)致嚴(yán)重的人車安全事故。本文以某自主品牌微型商用車型為研究對象,在其搭載的發(fā)動(dòng)機(jī)控制系統(tǒng)平臺(tái)基礎(chǔ)上,提出一種以發(fā)動(dòng)機(jī)進(jìn)氣量為測量判斷指標(biāo)識(shí)別電子節(jié)氣門動(dòng)力失控工況的方法,對故障模式下的節(jié)氣門動(dòng)作實(shí)現(xiàn)有效管理。
1 TPS信號(hào)偏移及影響
EMS系統(tǒng)采用雙路節(jié)氣門位置傳感器,冗余設(shè)計(jì)方式可以提高控制系統(tǒng)零部件的可靠性,當(dāng)其中一路信號(hào)失效時(shí),另一路信號(hào)仍然可以發(fā)揮作用。如圖1所示:①處為死點(diǎn),由限位螺釘限制節(jié)氣門最小開度,對應(yīng)的絕對角度為7°,并作為相對角度的零點(diǎn);②處為2號(hào)傳感器測量角度飽和點(diǎn),對應(yīng)絕對角度大約為56°,相對角度約為49°;③處為節(jié)氣門最大開度,約為絕對90°,相對83°。2號(hào)TPS在中小角度范圍內(nèi)(0°~46°)具有較高的測量精度,1號(hào)TPS在中大角度范圍內(nèi)(46°~90°)具有較高的測量精度,因此在未診斷出TPS信號(hào)故障時(shí),EMS將分段采用較高精度的TPS輸出信號(hào)作為主要控制依據(jù)。
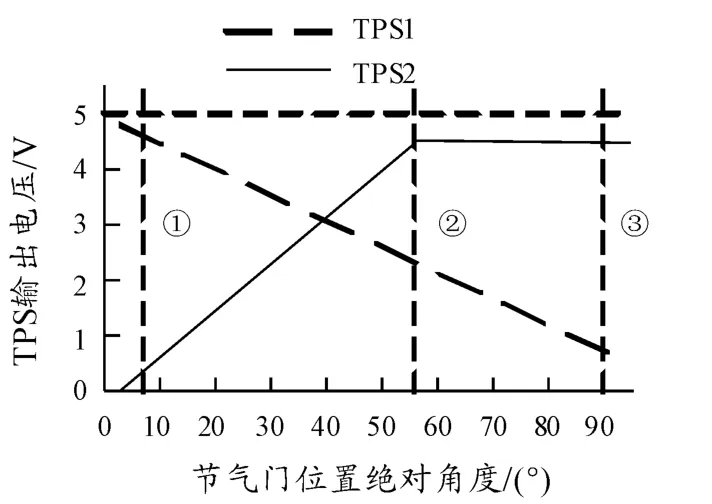
圖1 節(jié)氣門位置傳感器輸入-輸出特性
當(dāng)節(jié)氣門位置傳感器受到強(qiáng)烈撞擊等外在因素影響時(shí),內(nèi)部滑動(dòng)變阻器發(fā)生變形(針對變阻器式TPS),或者霍爾器件破損、安裝位置偏移(針對霍爾式TPS)等,會(huì)直接改變節(jié)氣門位置傳感器的輸入輸出特性,使測量反饋給控制系統(tǒng)電控單元的節(jié)氣門位置與實(shí)際位置之間產(chǎn)生較大偏差。圖2為較為極端的雙路TPS均遭受特性偏移的情況。
偏差產(chǎn)生之后,由于輸出信號(hào)仍然在上下限合理范圍之內(nèi),傳統(tǒng)的電壓診斷方式無法識(shí)別,并且在②與③位置之間,由于TPS2信號(hào)已達(dá)飽和,TPS1信號(hào)失去了相互比對校核的依據(jù),使1號(hào)傳感器的特性偏移更加難以識(shí)別。圖2中,在輸出電壓為2.5 V時(shí),TPS2的輸出特性由a點(diǎn)偏移至b點(diǎn),TPS1的輸出特性由c點(diǎn)偏移至d點(diǎn)。圖示的信號(hào)偏移方向會(huì)使系統(tǒng)獲知的當(dāng)前節(jié)氣門開度比實(shí)際開度小,系統(tǒng)將錯(cuò)誤地指令驅(qū)動(dòng)電機(jī)加大節(jié)氣門開度,使實(shí)際進(jìn)氣量遠(yuǎn)超目標(biāo)進(jìn)氣量,發(fā)動(dòng)機(jī)輸出扭矩劇烈增加,將導(dǎo)致車輛動(dòng)力失控。如果傳感器特性呈反方向偏移,系統(tǒng)獲知的節(jié)氣門開度比實(shí)際開度大,將錯(cuò)誤指令驅(qū)動(dòng)電機(jī)減小開度,造成車輛加速無力,但不至于發(fā)生危險(xiǎn)駕駛情況。
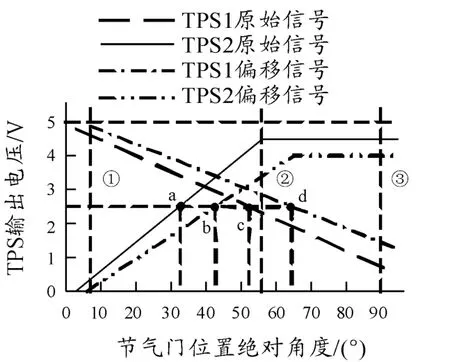
圖2 節(jié)氣門位置傳感器特性偏移
在現(xiàn)實(shí)情況中,傳感器特性偏移極少呈現(xiàn)整體偏移現(xiàn)象,更多的是偏移發(fā)生在某一個(gè)或者某幾個(gè)區(qū)間內(nèi)。輸入輸出特性的不穩(wěn)定性將會(huì)導(dǎo)致在駕駛車輛時(shí)反復(fù)出現(xiàn)劇烈聳動(dòng),特別是在低速擋大扭矩輸出時(shí)極易發(fā)生危險(xiǎn)駕駛工況。
2 駕駛動(dòng)力需求轉(zhuǎn)換
電子節(jié)氣門控制使節(jié)氣門實(shí)際開度與加速踏板開度之間不再呈現(xiàn)固定關(guān)系。節(jié)氣門目標(biāo)開度指令的發(fā)出需要經(jīng)過一個(gè)“加速踏板開度—目標(biāo)扭矩—修正扭矩—目標(biāo)進(jìn)氣量—目標(biāo)開度”的轉(zhuǎn)換過程。在轉(zhuǎn)換過程中,自動(dòng)變速箱扭矩請求、巡航控制請求、牽引力控制請求等均可以適時(shí)介入,極大地體現(xiàn)了電子節(jié)氣門對于扭矩控制的靈活性。
由駕駛員通過加速踏板開度βped請求提出基本動(dòng)力需求,經(jīng)過加速踏板特性轉(zhuǎn)換為基本扭矩需求Tbase。為了提高扭矩控制的平順性與穩(wěn)定性,與通常的加速踏板特性相比增加了1個(gè)維度,這是關(guān)于踏板開度與發(fā)動(dòng)機(jī)轉(zhuǎn)速n的三維函數(shù),如圖3所示。調(diào)整加速踏板特性可以改變整車對于駕駛員需求的響應(yīng)性能,直接影響駕乘主觀感受。
基本需求扭矩提出后,系統(tǒng)將考慮到發(fā)動(dòng)機(jī)摩擦損失Tfric、發(fā)電機(jī)動(dòng)力損失Talt、空調(diào)動(dòng)力損失Tac、冷卻風(fēng)扇動(dòng)力損失Tvsf以及機(jī)油泵動(dòng)力損失Tpump等因附件工作造成的發(fā)動(dòng)機(jī)扭矩消耗,以及汽車行駛過程中的迎風(fēng)阻力Tdrag等,見式(1)。由于發(fā)動(dòng)機(jī)不可能始終工作在標(biāo)準(zhǔn)工況下,因此還將對扭矩進(jìn)行海拔自適應(yīng)補(bǔ)償、水溫修正和進(jìn)氣溫度修正(見式(2)),用以精確比對臺(tái)架試驗(yàn)時(shí)恒標(biāo)準(zhǔn)工況下標(biāo)定出的發(fā)動(dòng)機(jī)凈扭矩。
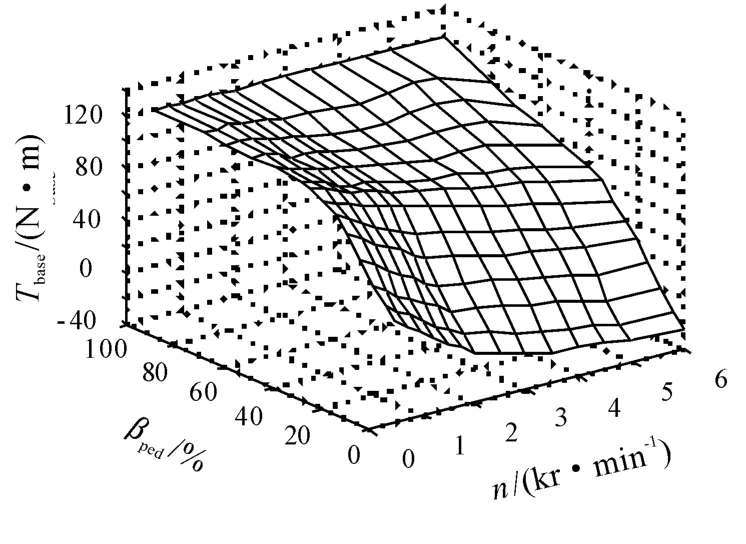
圖3 加速踏板特性

式中:Pair為當(dāng)前實(shí)測的大氣壓力;Kect為當(dāng)前實(shí)測的發(fā)動(dòng)機(jī)水溫;Kact為當(dāng)前實(shí)測的發(fā)動(dòng)機(jī)進(jìn)氣溫度。
在恒標(biāo)準(zhǔn)工況下進(jìn)行發(fā)動(dòng)機(jī)臺(tái)架試驗(yàn),測量出在化學(xué)當(dāng)量空燃比條件下發(fā)動(dòng)機(jī)處于爆震臨界點(diǎn)火角時(shí)的指示扭矩Tind,它是關(guān)于發(fā)動(dòng)機(jī)轉(zhuǎn)速n和發(fā)動(dòng)機(jī)負(fù)荷Lload的三維函數(shù)。定義負(fù)荷為當(dāng)前工況下發(fā)動(dòng)機(jī)實(shí)際進(jìn)氣量Acurr與標(biāo)準(zhǔn)工況下發(fā)動(dòng)機(jī)進(jìn)氣量Astan的比值,見式(3)。發(fā)動(dòng)機(jī)機(jī)-車體一體化后,發(fā)動(dòng)機(jī)工作時(shí)并非始終處于爆震臨界點(diǎn)火角,實(shí)際空燃比也會(huì)偏離化學(xué)當(dāng)量空燃比,4缸機(jī)的各噴油器也并非全時(shí)工作,因此發(fā)動(dòng)機(jī)實(shí)際輸出扭矩Tactu并不等于指示扭矩,而是相較于標(biāo)準(zhǔn)工況下輸出扭矩呈現(xiàn)比例下降的趨勢,見式(4)。因此,當(dāng)前工況下發(fā)動(dòng)機(jī)目標(biāo)進(jìn)氣量需要經(jīng)過一個(gè)反算過程得出:首先由當(dāng)前工況下實(shí)際點(diǎn)火角、實(shí)際空燃比和噴油器工作數(shù)量求出發(fā)動(dòng)機(jī)目標(biāo)指示扭矩Tind_des,見式(5);再由轉(zhuǎn)速和目標(biāo)指示扭矩查如圖4所示關(guān)系的三維表得出目標(biāo)發(fā)動(dòng)機(jī)負(fù)荷Lload_des;最后,由式(6)計(jì)算出目標(biāo)進(jìn)氣量Ades。

式中:Δω表示當(dāng)前點(diǎn)火角偏離爆震臨界點(diǎn)火角的絕對角度;λ表示實(shí)際空燃比控制值;Ninj表示處于工作狀態(tài)的噴油器數(shù)量比例。
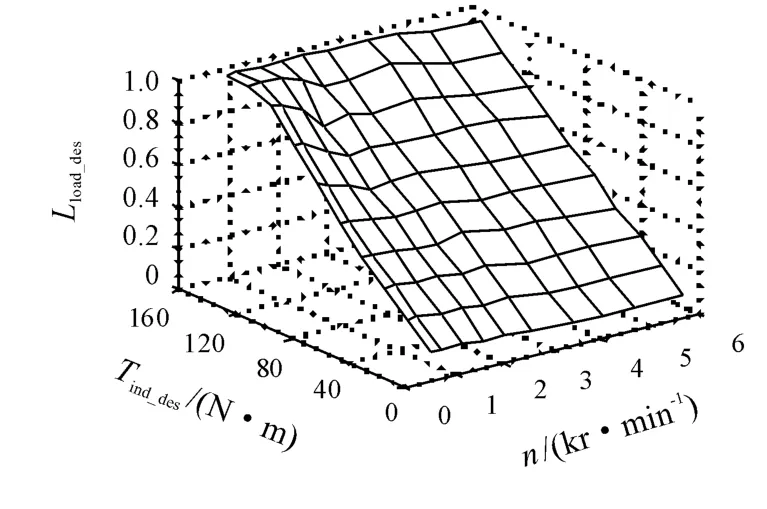
圖4 扭矩-負(fù)荷轉(zhuǎn)換曲線
根據(jù)流體質(zhì)量流量方程,可以得出如式(7)所示的通過節(jié)氣門閥片的進(jìn)氣質(zhì)量流量Mair,再根據(jù)氣體狀態(tài)方程將式(7)變形為式(8)。方程變形過程主要考慮將節(jié)氣門閥片前后的氣體壓力比Pratio作為一個(gè)整體變量,以便于通過試驗(yàn)標(biāo)定的方法將復(fù)雜繁冗的計(jì)算過程轉(zhuǎn)換為查表計(jì)算方式,從而簡化了控制過程。這使得某一特定型號(hào)的電子節(jié)氣門大批量生產(chǎn)應(yīng)用具有較好的實(shí)用性。

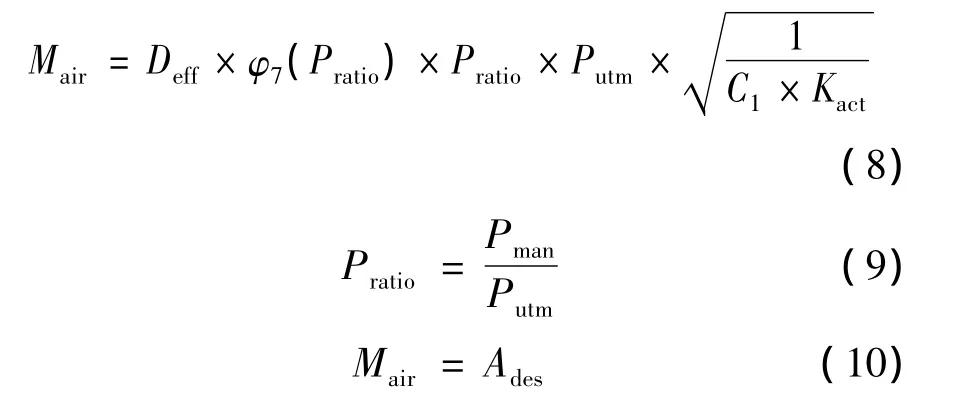
式中:ρa(bǔ)ir表示通過節(jié)氣門閥片的氣體密度;vair表示氣體流速;Deff表示電子節(jié)氣門有效截面積;Putm為節(jié)氣門閥片前端壓力;Pman為節(jié)氣門閥片后端壓力;C1為氣體常數(shù)。
將式(8)變形為式(11),即得出節(jié)氣門閥片有效截面積。根據(jù)特定型號(hào)的電子節(jié)氣門流速特性將式(11)中所有關(guān)于氣體壓力比Pratio的量通過試驗(yàn)標(biāo)定方法做成曲線,如圖5所示。再根據(jù)圖6所示節(jié)氣門閥片特性曲線將有效截面積轉(zhuǎn)換為目標(biāo)節(jié)氣門開度βthro_des,即完成了駕駛員動(dòng)力需求到電子節(jié)氣門目標(biāo)開度的完整轉(zhuǎn)換過程。給出目標(biāo)節(jié)氣門開度以后,以節(jié)氣門位置傳感器實(shí)時(shí)位置作為反饋,通過驅(qū)動(dòng)電機(jī)動(dòng)作對節(jié)氣門開度作閉環(huán)PID控制。


圖5 氣體壓力比相關(guān)輸出
3 動(dòng)力失控工況識(shí)別
TPS信號(hào)偏移致使PID閉環(huán)控制反饋量失真。在圖2所示的嚴(yán)重失真情況下,反饋給控制系統(tǒng)的節(jié)氣門開度比實(shí)際開度小,造成閉環(huán)控制的最終結(jié)果是實(shí)際開度比目標(biāo)開度大,供應(yīng)給發(fā)動(dòng)機(jī)的進(jìn)氣量比駕駛需求的進(jìn)氣量大。基于進(jìn)氣量的燃油量噴射原理如式(12)所示。由于系統(tǒng)無法檢測到TPS故障,所以系統(tǒng)無法進(jìn)入電子節(jié)氣門故障管理模式,也不會(huì)對燃油噴射進(jìn)行干預(yù)。在由未失真的TPS運(yùn)行工作區(qū)間突然轉(zhuǎn)入嚴(yán)重失真的TPS運(yùn)行工作區(qū)間時(shí),將會(huì)有瞬時(shí)的輸出扭矩爆發(fā),并可能持續(xù)一段時(shí)間,造成車輛動(dòng)力失控。
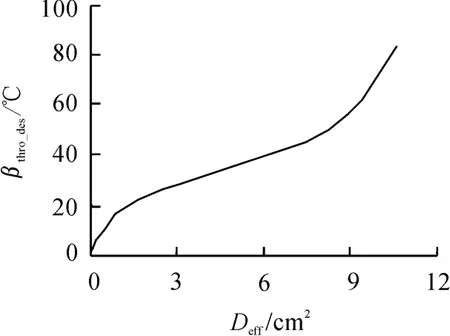
圖6 節(jié)氣門開度特性

式中:Mfuel為目標(biāo)噴油量;Mtran為瞬態(tài)燃油補(bǔ)償量;Mpurg為燃油蒸發(fā)系統(tǒng)來油量;Amap為基于進(jìn)氣壓力傳感器信號(hào)計(jì)算的發(fā)動(dòng)機(jī)實(shí)際進(jìn)氣量。
節(jié)氣門位置傳感器信號(hào)偏移造成節(jié)氣門控制位置偏差,節(jié)氣門位置控制偏差最終反映為發(fā)動(dòng)機(jī)的進(jìn)氣量偏差。實(shí)際進(jìn)氣量的測量計(jì)算可以從進(jìn)氣壓力傳感器信號(hào)快速得出,因此可以從目標(biāo)進(jìn)氣量與實(shí)際進(jìn)氣量的差異角度來識(shí)別車輛動(dòng)力失控工況,以便在故障出現(xiàn)時(shí)及時(shí)識(shí)別并主動(dòng)干預(yù)。
3.1 發(fā)動(dòng)機(jī)充氣計(jì)算
試驗(yàn)車輛使用進(jìn)氣壓力傳感器作為測量發(fā)動(dòng)機(jī)進(jìn)氣量的基礎(chǔ)信號(hào)。傳感器輸出為電壓信號(hào),因而發(fā)動(dòng)機(jī)實(shí)際進(jìn)氣量的獲取需要經(jīng)過一個(gè)換算過程。圖7為進(jìn)氣壓力傳感器輸入輸出特性,可見標(biāo)準(zhǔn)工況下在其有效測量區(qū)間內(nèi),輸入輸出呈現(xiàn)近似線性關(guān)系,表達(dá)為式(13)。根據(jù)氣體狀態(tài)方程,在標(biāo)準(zhǔn)工況下進(jìn)氣壓力與充氣質(zhì)量流量成正比關(guān)系。將式(13)改寫為式(14),再將式(14)變形為式(15),即可以通過進(jìn)氣壓力傳感器的輸出信號(hào)Vmap求得充氣質(zhì)量流量中間值A(chǔ)ful。
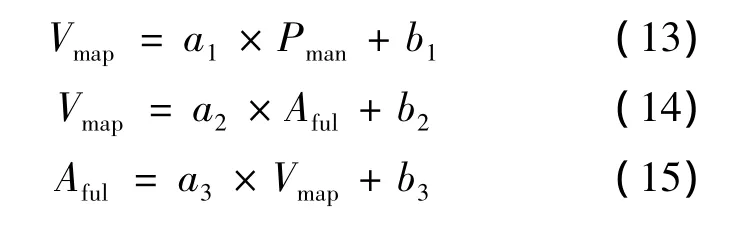
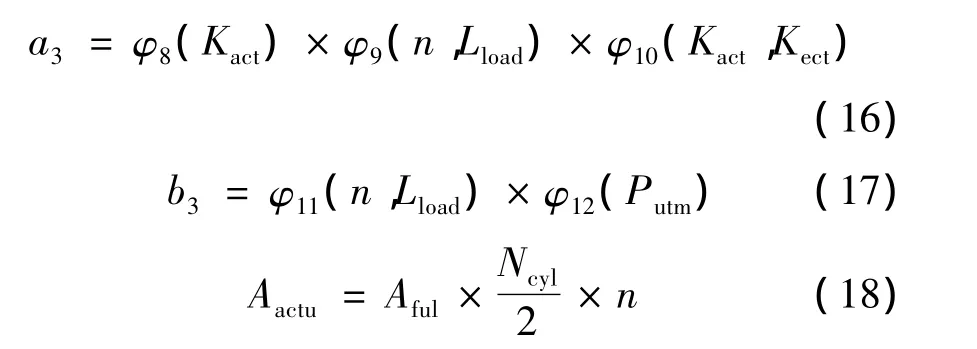
將當(dāng)前發(fā)動(dòng)機(jī)工況下的斜率a3經(jīng)過進(jìn)氣密度修正φ8、工況條件修正φ9和容積效率修正φ10(見式(16)),截距b3經(jīng)過工況修正φ11和大氣壓力修正φ12(見式(17)),最后由式(18)得出最終的發(fā)動(dòng)機(jī)實(shí)際進(jìn)氣質(zhì)量流量Aactu,式中Ncyl為發(fā)動(dòng)機(jī)總的氣缸數(shù)量。
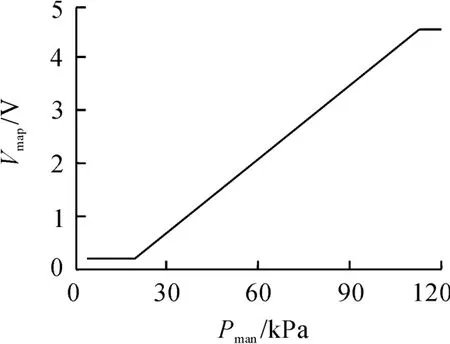
圖7 進(jìn)氣壓力傳感器輸入輸出特性
3.2 動(dòng)力失控工況判定
目標(biāo)進(jìn)氣量與實(shí)際進(jìn)氣量的計(jì)算以曲軸位置傳感器信號(hào)缺齒周期的1/2為軟件任務(wù)執(zhí)行調(diào)用周期,能夠快速、有效、及時(shí)地進(jìn)行信號(hào)更新,真實(shí)反映當(dāng)前狀態(tài)下進(jìn)氣量的變化。采用目標(biāo)進(jìn)氣量與實(shí)際進(jìn)氣量之間的偏差量判定動(dòng)力失控工況的流程如圖8所示。
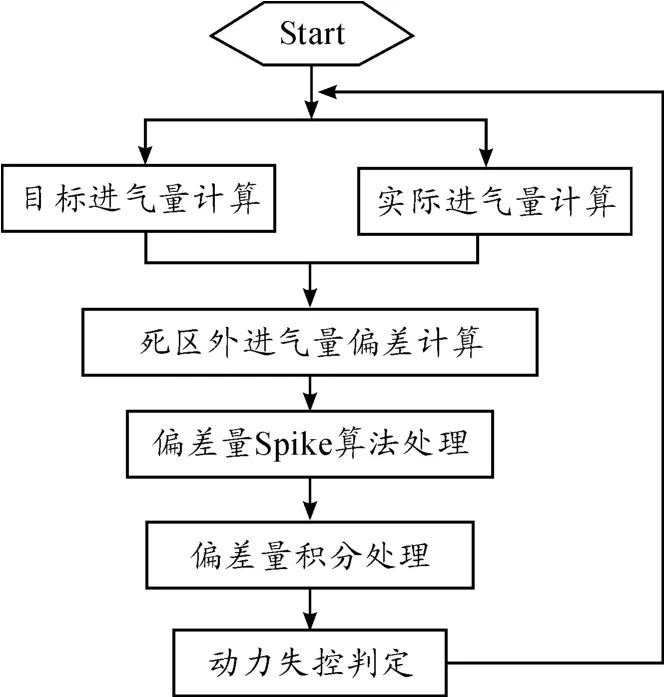
圖8 動(dòng)力失控判定流程
死區(qū)外進(jìn)氣量偏差計(jì)算按式(19)。死區(qū)Ahyst的設(shè)置在不同的轉(zhuǎn)速下有所區(qū)別,轉(zhuǎn)速越大死區(qū)范圍越大,用以對應(yīng)不同的基本扭矩需求,即在大扭矩需求下允許目標(biāo)進(jìn)氣量與實(shí)際進(jìn)氣量之間的偏差稍大,在小扭矩需求時(shí)允許目標(biāo)進(jìn)氣量與實(shí)際進(jìn)氣量之間的偏差稍小,并根據(jù)實(shí)車試驗(yàn)對每個(gè)工況點(diǎn)進(jìn)行適當(dāng)標(biāo)定修正,以消除固有誤差的影響。修正結(jié)果如圖9所示。



圖9 進(jìn)氣偏差量死區(qū)
發(fā)動(dòng)機(jī)機(jī)艙內(nèi)部環(huán)境相對復(fù)雜,加之傳感器本身的原因可能產(chǎn)生噪聲干擾信號(hào),信號(hào)毛刺尖峰會(huì)使信號(hào)本身嚴(yán)重失真,因此對式(19)計(jì)算出的死區(qū)外進(jìn)氣量偏差使用Spike函數(shù)進(jìn)行自適應(yīng)過濾處理[9-10]。Spike算法包含一個(gè)自適應(yīng)窗口和一個(gè)自適應(yīng)增益系數(shù),增益系數(shù)為大于1的常量。當(dāng)信號(hào)出現(xiàn)尖峰時(shí),超出自適應(yīng)窗口的值將被過濾掉,并使用窗口上/下限值作為有效值,同時(shí)自適應(yīng)窗口會(huì)利用增益系數(shù)隨著信號(hào)的變化逐步放大或者逐步收斂。Spike算法流程如圖10所示。
經(jīng)過Spike算法處理后的進(jìn)氣量偏差值A(chǔ)err_new以16 ms的任務(wù)執(zhí)行周期進(jìn)行積分處理,得到Aerr_int,并且將其值與判定限值實(shí)時(shí)比較。一旦超過限值A(chǔ)err_thr立即置位于動(dòng)力失控標(biāo)志位Fpocflg(見式(20)),判定為發(fā)生動(dòng)力失控工況。此標(biāo)志位將傳遞給EMS系統(tǒng)其他工作模塊,立即對節(jié)氣門驅(qū)動(dòng)電機(jī)和噴油進(jìn)行干預(yù),防止動(dòng)力失控工況長時(shí)間持續(xù),避免危險(xiǎn)駕駛情形的發(fā)生。
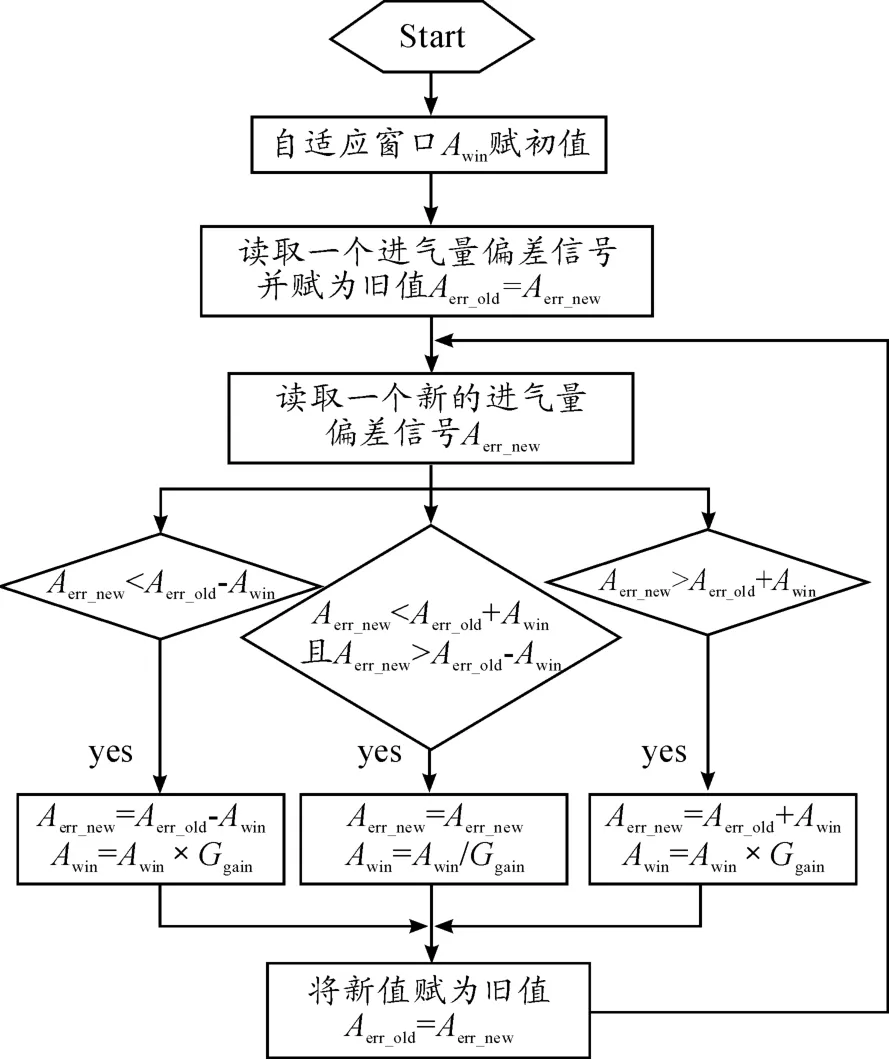
圖10 Spike算法流程
4 動(dòng)力失控故障管理
當(dāng)發(fā)生動(dòng)力失控工況時(shí),電機(jī)進(jìn)行正常響應(yīng)的參考信號(hào)已經(jīng)嚴(yán)重失真,應(yīng)該禁止電機(jī)的驅(qū)動(dòng)功能。因此,通過電控單元內(nèi)部的電機(jī)驅(qū)動(dòng)電路使電機(jī)勵(lì)磁線圈斷電,節(jié)氣門閥片軸由于電子節(jié)氣門體內(nèi)部的兩根復(fù)位彈簧的作用回到并始終維持在一個(gè)固定角度。試驗(yàn)車輛使用的電子節(jié)氣門對應(yīng)的固定角度為相對8°,絕對15°。當(dāng)駕駛車輛出現(xiàn)動(dòng)力失控時(shí),對驅(qū)動(dòng)電機(jī)直接干預(yù)優(yōu)于對燃油噴射進(jìn)行干預(yù),前者既能夠及時(shí)制止危險(xiǎn)駕駛工況又能夠較好控制發(fā)動(dòng)機(jī)的穩(wěn)定性,而后者極易造成發(fā)動(dòng)機(jī)熄火,導(dǎo)致車輛失去輔助制動(dòng)的動(dòng)力源,造成新的危險(xiǎn)工況。
變速器在前進(jìn)擋并且踩下加速踏板時(shí),EMS進(jìn)入“跛行回家”模式,相對8°的固定角度進(jìn)氣量足以維持車輛“跛行回家”的動(dòng)力需求,但加速踏板開度信號(hào)無法再靈活提出動(dòng)力需求,只有踩下加速踏板與未踩下加速踏板兩種請求狀態(tài),車輛的加速能力受到極大程度的制約,從而避免了本次駕駛循環(huán)再次發(fā)生動(dòng)力失控工況的可能性。
變速器處于空擋狀態(tài)且未踩下加速踏板時(shí),EMS進(jìn)入“游車怠速”控制模式。“游車怠速”與普通怠速控制有所不同,它要求在怠速狀態(tài)下發(fā)動(dòng)機(jī)轉(zhuǎn)速高低起伏波動(dòng),但不會(huì)熄火,既能夠滿足“跛行回家”功能需求,也能起到提醒駕駛者的作用。因此,將“游車怠速”模式的基本目標(biāo)怠速設(shè)置為1 000 r/min,高于普通怠速模式的750 r/min。當(dāng)實(shí)際轉(zhuǎn)速n小于1 000 r/min時(shí),要求所有4缸噴油器均正常工作。由于節(jié)氣門開度為相對8°,因此其提供的能量足以使轉(zhuǎn)速上升到1 000 r/min以上。當(dāng)轉(zhuǎn)速大于1 000 r/min時(shí),切斷2個(gè)氣缸噴油器以使轉(zhuǎn)速回復(fù)到目標(biāo)轉(zhuǎn)速;當(dāng)轉(zhuǎn)速大于(1 000+n1)r/min以后,切斷3個(gè)氣缸噴油器;當(dāng)轉(zhuǎn)速大于(1 000+n2)r/min時(shí),切斷所有4缸噴油器,如圖11所示。最終達(dá)到“游車怠速”的主觀駕乘感受,并且在儀表盤上的發(fā)動(dòng)機(jī)故障燈會(huì)閃爍顯示。
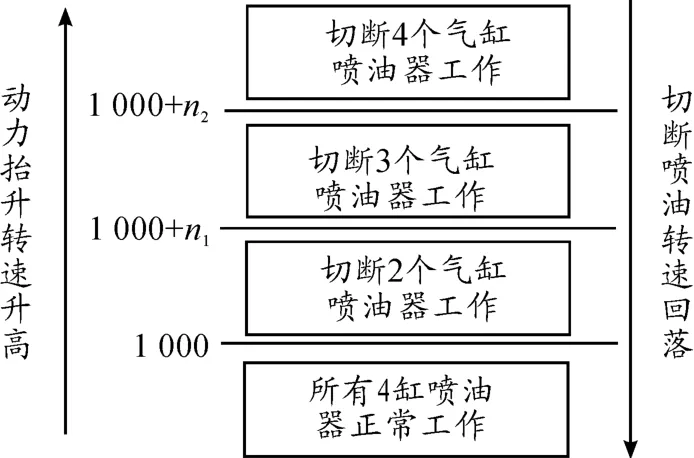
圖11 “游車怠速”控制基本原理
5 試驗(yàn)研究
5.1 動(dòng)力失控工況識(shí)別功能驗(yàn)證
對提出的控制策略在試驗(yàn)車輛上進(jìn)行實(shí)車駕駛試驗(yàn)驗(yàn)證,并主要針對1擋和2擋等傳動(dòng)系統(tǒng)大扭矩輸出工作區(qū)間進(jìn)行試驗(yàn),結(jié)果如圖12~15所示。為模擬由于TPS信號(hào)偏移造成的控制電機(jī)工作狀態(tài)突變,在控制電機(jī)輸入控制信號(hào)上外加一個(gè)持續(xù)擾動(dòng)βadd,用以觸發(fā)動(dòng)力失控工況。在圖12~15中:aace為車輛加速度;Vmotor表示電子節(jié)氣門驅(qū)動(dòng)電機(jī)控制電壓;Ades為目標(biāo)進(jìn)氣量;Aactu為實(shí)際進(jìn)氣量。
在圖12中未打開動(dòng)力失控工況識(shí)別功能,在使用1擋中等油門踏板開度進(jìn)行車輛加速的過程中,突然外加持續(xù)擾動(dòng)。此后發(fā)動(dòng)機(jī)轉(zhuǎn)速在2.3 s內(nèi)由3 100 r/min被急速拉升至6 000 r/min,車輛加速度也急劇增加,駕駛員能夠感受到十分明顯的車輛前沖,本能驅(qū)使采取松油門和踩剎車的制動(dòng)措施。但在駕駛員大腦決策并主動(dòng)采取措施之前的3~4 s,整個(gè)車輛仍然具有相當(dāng)大的加速度,車輛難以控制。在圖13中則打開了動(dòng)力失控工況識(shí)別功能,在外加擾動(dòng)后的大約1.2 s內(nèi),系統(tǒng)迅速檢測到實(shí)際進(jìn)氣量比目標(biāo)進(jìn)氣量過多的危險(xiǎn)情況,并立即對節(jié)氣門驅(qū)動(dòng)電機(jī)采取斷電措施(Vmotor=0),使實(shí)際進(jìn)氣量被限制在安全范圍內(nèi),有效避免了車輛動(dòng)力繼續(xù)失控。進(jìn)入故障管理模式后,目標(biāo)進(jìn)氣量請求命令失效,系統(tǒng)不再對其值進(jìn)行更新。
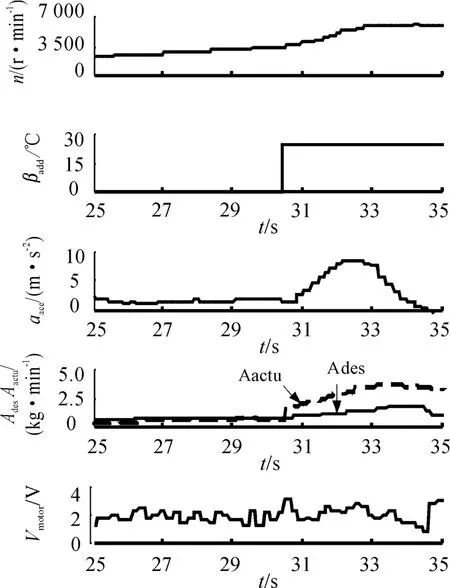
圖12 1擋行車動(dòng)力失控情況(無故障管理介入)
在圖14中未打開動(dòng)力失控工況識(shí)別功能,使用2擋中大油門踏板開度進(jìn)行車輛加速試驗(yàn),突然外加持續(xù)擾動(dòng)。此后發(fā)動(dòng)機(jī)轉(zhuǎn)速快速提升,車輛加速度也有一定程度的增加,只是由于變速器速比較1擋小,因此動(dòng)力失控程度相對較輕。但是此種相對較輕程度的動(dòng)力失控也會(huì)使低速擋車速無法維持在一個(gè)較小的平衡車速位置,車輛會(huì)始終處于加速狀態(tài)。由于加速度較大,也存在極大的安全隱患。在試驗(yàn)過程中,擁有豐富駕駛經(jīng)驗(yàn)的專業(yè)駕駛?cè)藛T在維持原來的駕駛狀態(tài)情況下,對于2擋動(dòng)力失控的情況均表示難以駕馭。在圖15中打開識(shí)別功能,在擾動(dòng)發(fā)生后的大約1.5 s內(nèi)系統(tǒng)就完成了對動(dòng)力失控工況的判定,并對控制電機(jī)采取斷電措施。
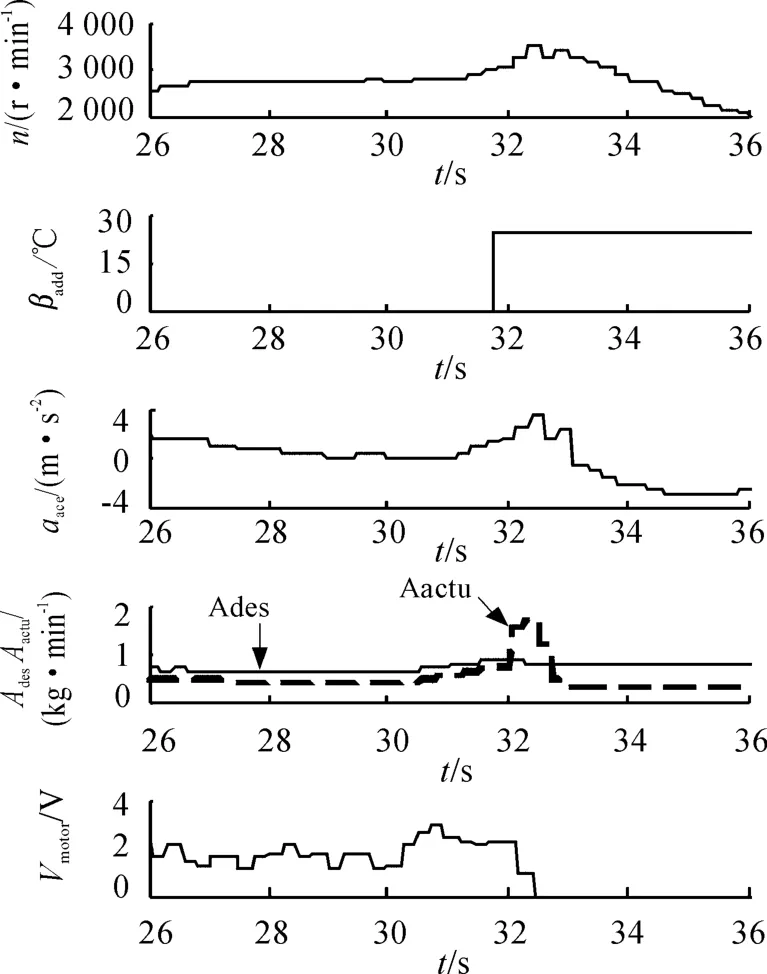
圖13 1擋行車動(dòng)力失控情況(有故障管理介入)

圖14 2擋行車動(dòng)力失控情況(無故障管理介入)
統(tǒng)計(jì)多次從外加擾動(dòng)開始到電機(jī)斷電之間的時(shí)間間隔,結(jié)果見表1,可見該時(shí)間間隔均能控制在1.6 s以內(nèi)。試驗(yàn)結(jié)果表明:在發(fā)生動(dòng)力失控工況后,系統(tǒng)能在很短的時(shí)間內(nèi)識(shí)別故障并及時(shí)采取主動(dòng)干預(yù)措施,有效避免了危險(xiǎn)駕駛狀況的發(fā)生。

圖15 2擋行車動(dòng)力失控情況(有故障管理介入)

表1 消除動(dòng)力失控時(shí)間統(tǒng)計(jì) s
5.2 “游車怠速”功能驗(yàn)證
在正常怠速時(shí),發(fā)動(dòng)機(jī)轉(zhuǎn)速波動(dòng)平穩(wěn),基本在目標(biāo)轉(zhuǎn)速±20 r/min以內(nèi)波動(dòng),偶有±30 r/min的波動(dòng),20 s內(nèi)的轉(zhuǎn)速標(biāo)準(zhǔn)偏差為11.8 r/min,駕駛者主觀感受幾無不舒適感,如圖16所示。當(dāng)在動(dòng)力失控被識(shí)別并觸發(fā)故障管理模式的怠速狀態(tài)下時(shí),發(fā)動(dòng)機(jī)轉(zhuǎn)速在1 000 r/min上下作更大幅度、更高頻率的波動(dòng),波動(dòng)幅度達(dá)到±60~100 r/min,波動(dòng)頻率明顯快于正常怠速,20 s內(nèi)轉(zhuǎn)速標(biāo)準(zhǔn)偏差達(dá)到39.7 r/min,駕駛者能非常明顯地感受到發(fā)動(dòng)機(jī)的振動(dòng),聽到高低起伏的“游車”聲音,如圖17所示。同時(shí),從儀表盤上可以觀察到發(fā)動(dòng)機(jī)故障燈有規(guī)律地閃爍,從而起到提示駕駛員當(dāng)前發(fā)動(dòng)機(jī)處于危險(xiǎn)工作狀態(tài)。

圖16 正常怠速時(shí)轉(zhuǎn)速波動(dòng)
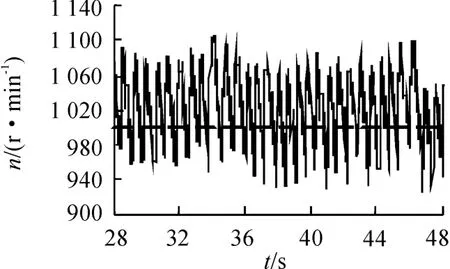
圖17 “游車怠速”時(shí)轉(zhuǎn)速波動(dòng)
6 結(jié)束語
分析了電子節(jié)氣門重要部件TPS信號(hào)偏移對發(fā)動(dòng)機(jī)進(jìn)氣量控制的影響,指出嚴(yán)重信號(hào)偏移會(huì)導(dǎo)致車輛動(dòng)力失控。分析推導(dǎo)了基于扭矩需求的從駕駛動(dòng)力需求到目標(biāo)節(jié)氣門開度的完整轉(zhuǎn)換過程,基于進(jìn)氣壓力信號(hào)演算了發(fā)動(dòng)機(jī)實(shí)際進(jìn)氣量。通過監(jiān)測目標(biāo)進(jìn)氣量與實(shí)際進(jìn)氣量之間的差異來識(shí)別動(dòng)力失控工況,并利用Spike函數(shù)設(shè)計(jì)了識(shí)別算法和動(dòng)力失控被識(shí)別后的故障管理策略。通過實(shí)車駕駛試驗(yàn)進(jìn)行功能試驗(yàn)驗(yàn)證,結(jié)果表明:所提出的策略能夠迅速、有效地識(shí)別動(dòng)力失控工況,并主動(dòng)采取干預(yù)措施避免危險(xiǎn)駕駛狀況的出現(xiàn),同時(shí)提示駕駛者當(dāng)前發(fā)動(dòng)機(jī)處于危險(xiǎn)工作狀態(tài)。
[1]郝允志,孫冬野,秦大同,等.瞬態(tài)工況下無級變速車輛的功率補(bǔ)償控制[J].湖南大學(xué)學(xué)報(bào)(自然科學(xué)版),2011,38(9):44-49.
[2]漆正剛.基于道路環(huán)境的無級變速車輛速比控制研究[D].重慶:重慶大學(xué),2014:27-41.
[3]李衛(wèi)兵,吳瓊,彭憶強(qiáng),等.電子節(jié)氣門系統(tǒng)故障管理策略研究[J].車用發(fā)動(dòng)機(jī),2013(4):19-23.
[4]王明文,甘海云,唐嵐.電子節(jié)氣門故障自診斷系統(tǒng)的開發(fā)[J].車用發(fā)動(dòng)機(jī),2009(5):88-92.
[5]邢天亮.基于數(shù)據(jù)驅(qū)動(dòng)的發(fā)動(dòng)機(jī)狀態(tài)監(jiān)測和故障診斷[D].長春:吉林大學(xué)通信工程學(xué)院,2012:62-73.
[6]CONATSER R,WAGNER J.Diagnosis of automotive electronic throttle control systems[J].Control Engineering Practice,2004(12):23-30.
[7]MARK C,ROBRT S,MARIO M.An Architecture for E-lectronic Throttle Control Systems[C]//SAE Technical Paper.USA:[s.n.],2003.
[8]Matsumoto.Control apparatus of internal combustion engine equipped with electronic throttle control device[P].981074305,1998-1028.
[9]李晟,戴連奎.一種簡單的在線拉曼光譜spike剔除方法[J].光散射學(xué)報(bào),2013(4):188-194.
[10]趙金星,許敏,李明.Atkinson循環(huán)發(fā)動(dòng)機(jī)人工神經(jīng)網(wǎng)絡(luò)模型的研究[J].汽車工程,2013,35(1):13-17.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
汽車與新動(dòng)力(2014年2期)2014-02-27 12:10:15
汽車與新動(dòng)力(2013年5期)2013-03-11 16:08:17